
种子清选机自动控制系统的研究
2022-12-16 01:07刘玉红
农机使用与维修 2022年12期
刘玉红
(双辽市柳条乡综合服务中心,吉林 双辽 136400)
0 引言
农作物种子清选是实现作物的高产稳产及农作物新品种培育与推广的重要基础条件[1]。种子清选主要是指对收获后的种子进行分类、清选与分级,将破碎、受损和不成熟的种子及杂草、泥沙等进行分离,为作物生长提供良好的基础条件,实现作物增产[2]。
随着现代化种业的发展,对农作物新品种选育的规模越来越大,在田间试验前需要对种子进行分级与清选,目前主要依靠种子清选机进行简易清选,存在劳动强度大、工作效率低等问题,通用种子清选设备存在种子易残留和种子清选耗时过长等问题。近年来,随着农业机械自动化和智能化发展,提升农业机械自动化水平对于实现农业现代化发展具有重要意义[3]。
1 控制系统设计
种子清选机自动控制系统方案如图1所示。本研究选取STM32控制器为数据控制核心,完成多项传感器数据处理与作业过程自动控制,人机交互界面选取DMT80600T104实现人机交互操作与界面展示,方便工作人员进行参数设定,并实时监测种子清选机工作状况,控制系统工作流程如图2所示。

图1 种子清选机控制系统结构示意图

图2 种子清选机自动控制流程图
在种子清选机自动控制系统中采用3对光电传感器(GF-NA22)进行工作参数信息监测,主要包括物料料位信息(S1)、筛片前端物料信息(S2)、筛片末端物料信息(S3),其中,Si=0表示无物料,Si=1表示有物料,i=1,2,3分别表示料斗料位、筛片前端和末端种子清选信息。控制策略如表1所示。

表1 种子清选机自动控制系统控制策略
2 控制系统硬件设计
2.1 STM32控制系统
选取STM32-F407ZGT6处理器为控制中心,实现对光电传感器信号、倾角传感器及种子清选机各个组成部分工作信息的采集与决策。STM32-F407ZGT6是一款微控制器单元,基于高性能ARM Cortex®-M432位RISC内核,工作频率高达168 MHz。Cortex-M4内核具有浮点单元(FPU)单精度,支持所有ARM单精度数据处理指令和数据类型,实现了全套DSP指令和增强应用程序安全性的内存保护单元(MPU)。所有器件均提供3个12位ADC、2个DAC、1个低功耗RTC、12个通用16位定时器,包括2个用于电机控制的PWM定时器、2个通用32位定时器,主要规格参数如表2所示。

表2 STM32-F407ZGT6处理器技术参数与规格
2.2 人机交互模块
人机交互模块采用迪文DGUS串口屏进行系统开发,主要包括登录页面、菜单界面、参数设施和提示信息等功能。种子清选机各个装置的主要参数调节范围如表3所示。

表3 不同装置参数调节范围
2.3 给料速度控制方法
种子清选机给料速度通过数字变压器(SDVC31-M)进行电压调控,电压与给料速度对应关系满足以下二次多项式拟合方程
y=2 820.1x2-12 111x+14 358
(1)
式中y—给料速度,g·s-1;
x—PF7端口电压,V。
2.4 振动频率控制方法
种子清选机振动频率主要通过改变筛面驱动电机转速进行调节。MOS(MOSFET)管输出电压由式(2)确定
(2)
式中U1—MOS管输出电压,V;
UM—MOS管供电电压值,24 V;
UM1—MOS管输入电压最大值,5 V。
筛面驱动电机转速最高可以达500 r·min-1,此时最大振动频率为8.3 Hz,此时筛面振动频率fs由式(3)进行计算
(3)
2.5 筛面倾角控制方法
筛面倾角采用BWD-VG227倾角传感器进行调节,控制中心基于RS485通讯方式进行倾角传感器信号的读取,与提前设定的倾角参数进行对比分析,达到倾角后电机停止工作。
3 控制系统的试验与分析
以玉米种子为试验材料开展种子清选机给料速度、筛面倾角和振动频率的控制与试验分析。
3.1 给料速度
给料速度依次选取45 g·s-1,50 g·s-1,55 g·s-1,60 g·s-1共4个水平开展试验,每组试验重复3次取平均值并按式(4)计算变异系数。试验结果如表4所示。结果表明,不同给料速度下最大误差范围为1.2~2.1 g·s-1,最大变异系数为2.2%~3.2%,均满足种子清选要求。
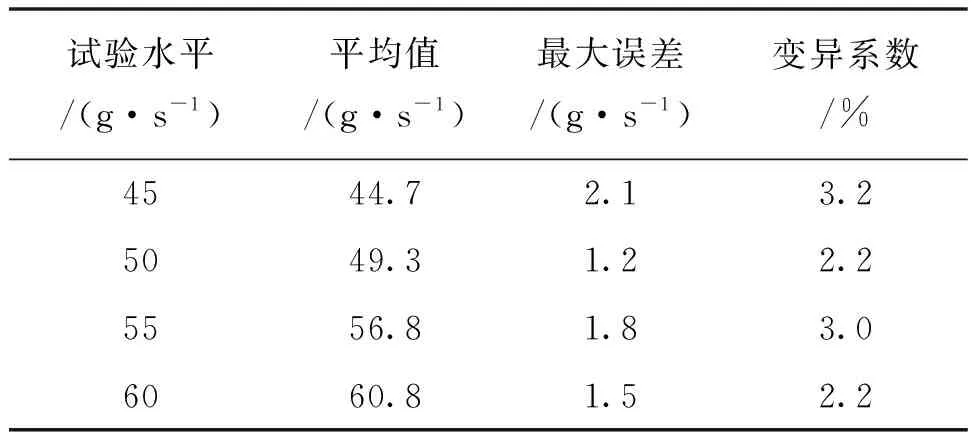
表4 给料速度控制试验结果
(4)
式中CV—变异系数,%;
S—标准差;
x—各试验结果值;

N—重复试验次数。
3.2 筛面倾角
倾角调节范围为4°~7°,步长为0.5°,每组试验重复3次取平均值并计算变异系数。试验结果如表5所示。不同倾角调节角度下最大误差和变异系数满足实际生产要求。

表5 倾角控制试验结果
3.3 振动频率
根据不同种子筛分所需的振动频率设定5 Hz,6 Hz,7 Hz,8 Hz为实验条件,每组试验重复3次取平均值并计算变异系数。试验结果如表6所示。不同振动频率下最大误差范围为0.10~0.23 Hz,最大变异系数为1.4%~2.6%,均满足种子清选要求。
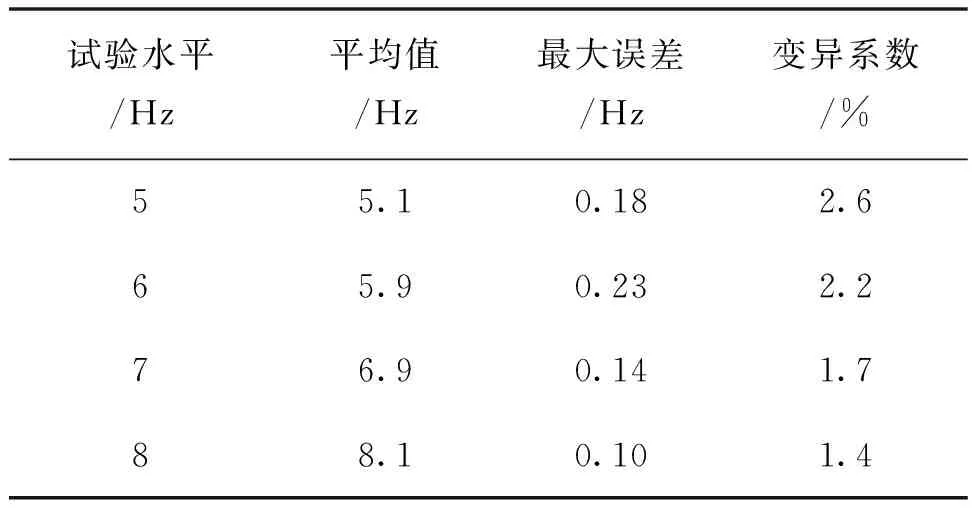
表6 振动频率控制试验结果
4 结论
针对目前种子清选效率低、劳动强度大等问题,基于ARM嵌入式技术设计一种种子清选机自动控制系统,并对核心部件与进行系统论述与选型,基于给料速度、筛面倾角和振动频率进行系统验证与分析,试验结果表明,各项参数可以满足种子清选机的工作需求。
猜你喜欢
科学大众(2023年17期)2023-10-26
选煤技术(2022年3期)2022-08-20
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
选煤技术(2021年6期)2021-04-19
天天爱科学(2020年6期)2020-09-10
数学物理学报(2017年6期)2018-01-22
计算物理(2014年2期)2014-03-11
河南科技(2014年23期)2014-02-27
