喷雾机内药液晃动横向力测量系统的设计
2022-12-16 01:07:20杨亚飞张肖柯杨金歌邓武清
农机使用与维修 2022年12期
杨亚飞,张肖柯,杨金歌,邓武清,金 濯
(江苏农牧科技职业学院,江苏 泰州 225300)
0 引言
机械施药作为现阶段植保作业的主要手段。喷杆式喷雾机具有作业效率高、防治效果好的特点,已成最重要的大田施药装备。2013年开始,我国农机补贴目录中加大了喷杆式喷雾机补贴力度[1-2]。
对于喷杆式喷雾机而言,为了保证作业时的通过性,喷雾机行走底盘离地间隙较高,附加的横向力会增加喷雾机侧翻危险的发生概率。由于田间地块的不规则性,喷杆式喷雾机在作业时,药箱内液体会产生晃动,而药箱内液体和喷雾机机体属于液固耦合连接,晃动产生的附加载荷会影响喷雾机整机性能。因此,研究喷雾机药箱内液体晃动载荷对喷雾机底盘技术、整机安全性能及喷雾作业性能的提升有着重要意义[3-5]。
为了得到喷杆式喷雾机药箱药液晃动横向力规率,同时研究附加的横向力对喷雾机作业性能的影响,为喷雾机的设计提供依据,本文设计了一种测量药箱药液晃动横向力的测量系统。
1 喷雾机药箱药液晃动的力学分析
由于药箱药液晃动问题具有复杂性,为了准确测量出药箱药液晃动横向力,构建一种正确的测量系统,对喷雾机药箱进行受力分析如图1所示。

图1 药箱药液晃动力学模型
喷杆式喷雾机在作业时,会受到路面的激励q1、q2,使药箱中液体晃动,会对药箱产生附加作用力。药箱横向晃动会使液体产生沿y方向的动压力Fy,使药箱受到附加的横向力;同样,药箱横向晃动会导致液体质心偏移,使药箱产生附加力矩Mx。药箱纵向晃动,药箱横向晃动会使液体产生沿x方向的动压力,使药箱受到附加的横向力Fx,同样会使药体质点偏移导致液箱产生附加的力矩My。在z轴方向,药箱受液体的重力mg。
同样,药箱受到晃动液体对其施加的其他方向的力。包光伟[6]指出药箱平动只能激发储液箱内液体二维晃动,即横向晃动和纵向晃动。喷雾机田间作业时,对药箱激励使液体主要产生横向和纵向晃动。因此,认为药箱因液体晃动而受到其他方向的力比较小,因而不做考虑。
2 药箱药液晃动横向力测量系统设计
2.1 横向力测量系统主体
由于喷雾机药箱与行走底盘机架相连,药箱受到的附加力会传递到喷雾机行走底盘。通过上述分析,喷雾机行走底盘受到药箱作用力。喷雾机安全性是第一位考虑因素,药箱药液晃动横向力会增加喷雾机发生侧翻机会,同时横向力会影响喷雾机行驶直线稳定性,造成喷雾不均。因此,本测试系统研究目的在于测量作用于喷雾机行走底盘上附加的药箱药液晃动横向力Fy。
本系统主要由横向力测量传感器、动态应变仪、数据采集仪、计算机、信号分析软件及12 V直流电池组成,系统框图如图2所示。横向力传感器通过应变片产生的应变大小的变化使测量电路产生相应的电压信号,通过测量电压信号测量相对应的横向力Fy。

图2 药箱药液晃动横向力测量系统
横向力测量传感器应变片测量电路和动态应变仪桥盒连接,将药箱药液晃动横向力作用产生的应变转化为电压信号传递给动态应变仪。动态应变仪将应变片测量电路中的输出电压经过放大和低通滤波传递给数据采集仪。数据采集仪通过USB接口与计算机相连,数据采集仪的采样频率、存储路径等功能通过信号分析软件来设置,信号分析软件将数据采集仪采集的电信号进行分析后存储于计算机中。喷雾机自带12 V直流电源给动态应变仪供电。测量系统各部分实物图如图3所示。

图3 横向力测量系统各部分实物图
2.2 药箱药液晃动横向力测量力敏元件的设计
根据喷雾机药箱药液晃动力学模型,喷雾机除了受药液晃动横向力外还受到其他方向的力。为了保证力敏元件既在主测量方向有足够的灵敏度,还保证其他方向力的加载对力敏元件应变片测量电路输出信号的干扰要足够小,这就要求力敏元件要有合理的结构设计和布片方式,力敏元件的结构和应变片布片方式如图4所示。
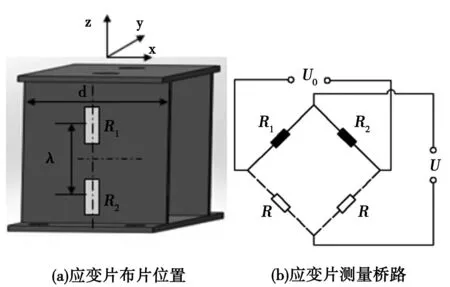
图4 应变片布片方式示意图
为了使横向力测量力敏元件对横向力Fy反应的灵敏度大于对纵向力Fx的灵敏度,所设计力敏元件尺寸d=11δ(δ为应变片所安装板材壁厚)。应变片R1和R2布置在主变形体的竖直对称线上,两应变片上下对称,距离λ为100 mm。应变片R1、R2与大小为120 Ω的标准电阻R连接成应变片测量桥路。
当R1=R2=R时,应变片测量电路输出电压为
(1)
当ΔRi≤R时
(2)
式中U0—供电电压,mV;
ΔRi—各电阻变化值,i=1、2;
ki—电阻应变片灵敏系数,i=1、2;
εi—应变片的应变,i=1、2。
当力敏元件受到横向力Fy时,由于横向力Fy在R1和R2处的力臂不同,会使R1、R2产生不同大小的应变,从而使应变片测量桥路输出相应的电压。当力敏元件受到力矩Mx时,由于力矩的传递特性,力矩Mx使R1、R2产生相同的应变,根据公式(2),应变片测量桥路输出电压为0。同理,当力敏元件受到力矩My时,应变片测量桥路输出电压也为0。当力敏元件受到竖直方向重力mg时,认为桥路上应变片同时受压,每个应变片产生的电阻变化相同,则测量桥路输出电压依然为0。
研究过程选择浙江黄岩测试仪器厂生产的BX120-3AA箔式应变片,应变片主要技术参数如表1所示。

表1 应变片主要技术参数
2.3 力敏元件的试验标定
为了得到所设计的传感器输出电压和测量方向横向力之间的关系,以及传感器的线性度、稳定性和重复线静态性能,对传感器进行标定试验,标定现场如图5所示。

图5 传感器标定实验
将传感器测量桥路与动态应变仪桥盒相连,连接示意图如图6所示,桥盒连接于动态应变仪输入通道,将动态应变仪相应的输出通道通过BNC数据线与数据采集输入通道相连,数据采集仪通过USB接口连接计算机。动态应变仪接通电源,预热30 min,打开数据处理软件,识别采集仪数据采集通道,设置数据存储路径和数据采集仪采样频率。动态应变仪选择合适采样频率范围,灵敏度放大倍数和校准值,调平测量桥路。选择的采样频率为300 Hz,采样频率范围为0~100 Hz,动态应变仪灵敏度放大倍数为10,校准值为900uε。

图6 测量桥路与桥盒连接示意图
将传感器安装在专用标定架进行标定,标定力臂距长度为0.2 m,沿横向y方向正反方向分别进行加载和卸载进行标定,标定试验重复2次,记录输出电压绝对值见表2。

表2 传感器标定数据 单位:mV
采用最小二乘法对传感器y方向和-y方向标定的实测数据进行拟合,绘制的标定曲线见图7。拟合得到输出电压的绝对值y(mV)与横向力x(N)的线性关系

图7 药箱药液晃动横向力测量传感器标定曲线
y=0.743x+0.387
(3)
相关系数R2=0.995。根据标定数据和拟合方程,该传感器的线性度为0.915%F·S,重复性误差为1.597%F·S,迟滞为0.83%F·S。
3 结论
分析了药箱内药液晃动横向力测量要求,根据药液晃动横向力测量要求,构建了横向力测量系统,设计了横向力测量传感器。并对其进行标定,该横向力测量传感器线性度为0.915%F·S,重复性误差为1.597%F·S,迟滞为0.83%F·S。
猜你喜欢
大地测量与地球动力学(2024年5期)2024-04-23 07:26:28
农业开发与装备(2022年7期)2023-01-05 10:15:01
地震地磁观测与研究(2022年3期)2022-10-03 12:08:48
中国地震(2021年3期)2022-01-12 09:42:00
地震地磁观测与研究(2021年2期)2021-04-12 14:40:34
少年漫画(艺术创想)(2019年7期)2019-11-25 09:23:18
中小企业管理与科技(2019年3期)2019-03-07 06:31:10
少儿美术(快乐历史地理)(2018年8期)2018-12-03 08:20:56
农机使用与维修(2018年3期)2018-03-23 11:42:46
林业机械与木工设备(2017年3期)2017-03-08 07:55:35