微观交通仿真模型参数标定研究综述
2022-12-13 07:26刘昕刘志远聂品顾子渊
铁道科学与工程学报 2022年11期
刘昕,刘志远,聂品,顾子渊
(1.东南大学 交通学院,江苏 南京 211189;2.华为技术有限公司 应用场景创新实验室,广东 深圳 518129)
交通仿真在解析复杂交通网络供需平衡机理和推演交通时空运行状态方面具有显著优势,在交通系统建设、运营与管控中发挥着重要作用。以缓解交通拥堵、保障道路安全、优化出行服务、控制尾气排放等解决实际交通问题为目标,多层级交通仿真工具不断进行更新换代,嵌入与融合大量参数与模型,例如将微观车辆排放模型融入交通仿真工具[1]。这些参数、模型的预设与封装为交通管理者与研究者使用交通仿真工具带来了便利,但也为仿真工具适用性和仿真结果可靠性带来挑战。受益于交通仿真模型参数标定方法与技术的迅速发展,交通仿真工具的可移植性、仿真结果的准确性得到保障。在狭义上,交通仿真模型参数标定是指通过降低仿真数据与真实数据集的差距来寻找内置模型的最优参数[2];而在广义上,交通仿真模型参数标定包含了参数校核与验证2个步骤,基于特定场景下的交通信息,一部分信息用于校核获取仿真过程中各参数(路网属性参数、仿真过程参数、仿真模型参数、随机参数)的最优组合,另一部分信息则用于验证仿真输出结果与真实情况的差异,来刻画交通仿真工具的模拟性能。交通仿真模型参数标定是应用交通仿真软件的前提。本文利用Web of Science核心合集,通过traffic calibration关键词检索2 764篇文献,研究热点关键词如图1所示,由左下角关键词“微观交通仿真”可以看出,受益于交通大数据融合与共享技术的不断发展,依赖高精度数据的微观交通仿真模型成为研究热点,其标定问题也引起了大量关注。随后,增加traffic simulation作为关键词缩小范围,共检索960篇文献,作者分布如图2所示,所收集文献包含发表过至少3篇文献且被引用次数超过3次的研究者158位,主要来自麻省理工学院、那不勒斯大学、马里兰大学等高校及研究机构。结合文献溯源方法,选取了具有代表性的51篇文献,追踪广义上的微观交通仿真模型参数标定的研究进展。首先,系统综述了微观交通仿真参数标定的基本假设和标定的关键步骤;其次,围绕不同问题维度的最新标定方法进行综述;随后,重点讨论了交通仿真参数标定的流程框架;最后,在总结现有研究的基础上,提出了交通仿真模型参数标定研究的发展方向。

图1 交通模型标定领域的热点关键词分布情况Fig.1 Distribution of co-occurrent hot keywords in the field of traffic calibration
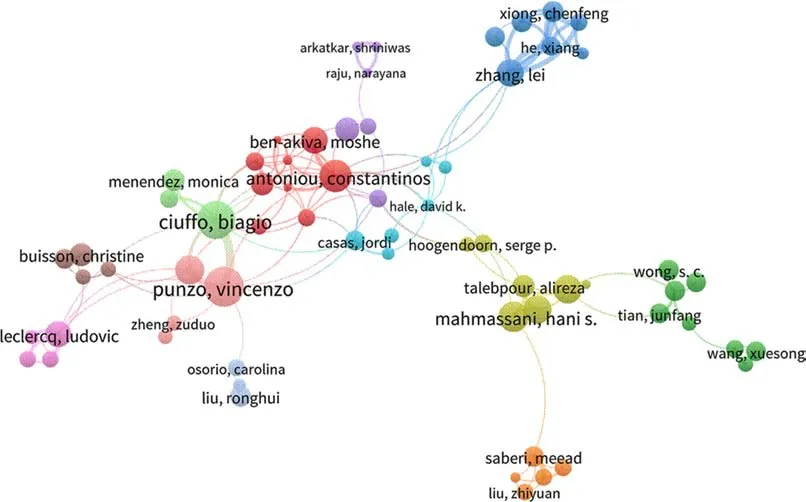
图2 交通仿真模型标定领域的作者分布情况Fig.2 Distribution of co-authorship in the field of traffic simulation calibration
1 交通仿真模型参数标定的基本假设
1.1 交通仿真模型参数标定的问题定义
如何根据现有数据对交通模型的参数进行标定是交通仿真中的一个重要问题。通常,将交通模型的标定问题转化为优化问题,其中决策变量为交通模型参数,目标函数表示为实际数据与仿真效果之间的差异[3]。大量已标定的交通模型被内置于交通仿真软件,并适配供需两端的数据输入功能,广泛应用于解决交通问题。然而,交通仿真软件中的驾驶员、车辆和道路以及仿真环境之间存在相互影响,这些交互作用为交通仿真模型参数标定带来挑战。由美国联邦公路管理局资助编制的《交通微观模拟建模软件应用指南》[4]指出,现有参数标定的研究大多集中在具体的模型上,但交通仿真的标定具有庞杂的模型参数空间,
其中每一个参数都与其他参数高度相关,有必要将校准过程分解为一系列合乎逻辑的、连续的步骤,从而形成校准的“策略”。简言之,交通仿真模型参数标定旨在解决的问题是,如何通过建立一套完整的标定框架,结合特定交通仿真软件对选取的参数组合进行优化,来综合提升交通仿真模型的有效性。该问题的挑战在于交通仿真的非线性、非凸性、实时性、高计算复杂度和缺乏封闭式数学表达,需要转化为仿真优化问题进行求解。
1.2 交通仿真模型参数标定的重要假设
为了将跟驰理论应用到实际工作,王殿海等[5]将其建模过程分为模型结构确立,参数标定和效果验证3个部分,但该工作未能与仿真软件相结合。BURGER等[2]在建模的基础上考虑了交通仿真软件的应用过程,提出了设计和使用2个阶段。设计阶段是指围绕研究问题、研究单位的细节水平和计算效率的要求,在使用宏观、中观和微观仿真模型之间做出选择;使用阶段是从场景出发,利用现有信息对交通仿真软件进行校核与验证,随后应用于具体项目。HOLLANDER等[6]总结了使用阶段的仿真模型参数标定问题的2条重要假设:1) 交通仿真软件内置了有充分研究基础的行为理论模型,仅使用集计数据能够满足标定需求;2) 被校准的模型能够近似表示实际交通网络里的所有影响因素。这2条假设简化了交通仿真模型的参数标定过程,在实际应用中具有操作性,但受到有限数据源和缺乏不确定性分析的制约,不利于仿真参数标定效果的进一步提升。实际上,交通仿真模型参数标定过程引入了大量的不确定性,如驾驶行为的异质性[7]、测量数据的误差[8]等。在交通仿真软件的设计阶段和使用阶段,均有必要将所有的不确定性来源与参数输入结合,来减少输出中的不确定性,从而保证仿真结果的可靠性。因此,设计阶段不能仅看作交通仿真模型参数标定的准备工作,而是交通仿真软件标定问题的重要一环。
在HOLLANDER等[6]的研究基础上,本文对交通仿真模型参数标定的假设解释如下:1) 交通仿真模型的选取是交通仿真参数标定问题的子问题,需要对仿真模型的选取及参数标定进行一体化考虑;2) 仿真模型参数标定过程引入的不确定性,会随着参数输入的调整而逐渐降低。ANTONIOU等[9]综述了交通仿真中的技术问题,提出交通仿真标定在参数结构、数据来源、性能指标和拟合优度的选取、大规模仿真效率、通用案例建设等方面可以开展更多的研究工作。但该研究在数据类型和样本量上缺乏一般性规范[10],无法应用于国内交通仿真模型参数的标定问题。本文将在上述研究的基础上阐述最新研究进展,并对标定策略和应用框架进行说明。
2 交通仿真模型参数标定的关键步骤
交通仿真优化问题是指,通过仿真模型的输出来评估系统的性能,找到系统某些决策变量的最优值。同理,在交通仿真模型的标定问题中,决策变量为模型参数,待评价的性能为模型的复现能力。BEN-AKIVA等[11]将交通仿真软件的待标定参数分为需求参数和供给参数。其中,需求参数以OD矩阵(origin-destination matrices)的形式呈现,反映出行者个人决策的组合;供给参数包含了车辆排队、跟驰、换道等驾驶行为参数以及路段通行能力、速度-密度关系等路网环境参数,反映了交通流和基础设施影响下的交通网络特征。表1列举了部分研究中的待标定参数的选取,由于微观仿真软件的参数设置各异,在实际工作中需要根据特定仿真软件确定待标定参数的结构。
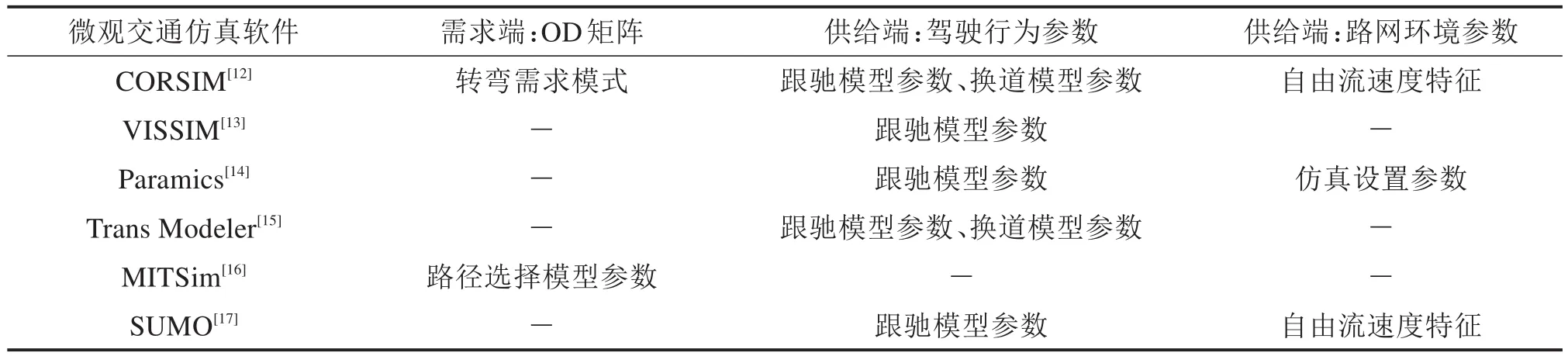
表1 交通仿真模型待标定参数分类Table 1 Calibration parameters of microscopic traffic simulation models
根据实时性的需求,研究者将交通仿真模型参数标定分为在线标定[18]和离线标定[19],离线标定用于保证模型能够复现平均状态,而在线标定将离线标定结果作为先验知识,用于实时预测交通状况。在仅从道路检测器获取流量、速度、通行时间等集计数据的情况下,TOLEDO等[20]提出了在MITSim中采用迭代的方式表述驾驶行为模型、OD矩阵和路线选择行为参数之间的交互关系,利用迭代从集计数据中获取更多信息,但每一次迭代都需要进行多次仿真以实现动态交通分配和参数调整的需求,运行效率较低。孙剑等[21]提出了微观交通仿真模型系统参数的标定流程,将待标定参数定义为容易测量且在仿真中可以更改的可控参数,并对不随模型变化的不可控参数采用实地测量的方式进行采集,实地测量获取参数的方式可归为手动校准。手动校准是指预先确定每个参数的离散值,使用正交实验法、拉丁方格法等实验设计理论选取代表性参数组合,该方法能够降低参数标定的工作量,仅适用于仿真范围小[22]、待校正参数少于5的情况[6],但测量成本较高,可移植性较差。
近年来,随着交通数据采集、存储、传输与挖掘技术不断提升,微观交通仿真模型参数标定的数据来源更加丰富,如从车辆行驶记录、航拍、导航定位中获取非集计的微观数据进行参数标定。车牌识别数据[23]常被用于校核交通需求,而由美国联邦公路管理局发起的Next Generation SIMulation(NGSIM)计划,为跟驰[24]、换道[25]等微观仿真研究提供了高时空分辨率的车辆轨迹数据[26]。PUNZO等[27]基于意大利高速公路车辆轨迹数据和合成数据(利用仿真生成跟车状态的车辆轨迹数据),发现使用轨迹数据进行校核存在过拟合的问题,指出使用合成数据来选取待标定参数结构、标定方法和性能指标的合理性。此外,微观交通仿真内置的模型多用于准确刻画驾驶行为和交通流态势,如果需要评估车辆排放、交通安全等问题,需要对底层模型进行改进。在不明显影响交通仿真模型复现能力的前提下,使用敏感性分析方法可以减少待标定参数的数量,降低标定过程的复杂程度和计算负担。CIUFFO等[28]考虑输入参数对输出结果的影响程度具有不对称性,提出了多步敏感性分析的交通仿真模型参数标定方法,减少了80%的模型评价过程,提升了校准速度。此外,拟合优度和性能指标的选择影响标定结果验证的可靠性[29],交通仿真模型标定中常用的拟合优度和性能指标介绍可参考HOLLANDER等[6]的研究。
3 交通仿真模型参数标定方法
CIUFFO等[30]将“没有免费午餐”的定理引入交通仿真模型参数标定,提出对于所有可能的问题,任何的优化算法的预期性能都是相同的,而最合适的求解算法往往取决于要研究的具体问题。GU等[31]在实验中对比了4种仿真优化方法的效果,指出低维度问题和高维度问题适用不同的优化方法。因此,本节从研究问题的维度出发,对微观交通仿真模型参数标定方法的研究进展进行总结。AMARAN等[32]根据决策变量的属性将仿真优化方法分为离散型和连续型,连续型仿真优化方法可以细分为7类[31],常被应用于交通仿真模型参数标定的主要方法包括元启发式算法(Metaheuristic Methods), 人 工 神 经 网 络 (Artificial-Neural-Net‐work-based Methods),卡尔曼滤波(Kalman Filterbased Methods)、基于梯度的方法(Gradient-based Methods)、 响 应 面 法 (Response Surface Methods)。如表2所示,各种仿真标定方法可应对交通仿真模型参数标定问题的各类挑战,并应用于不同维度的仿真标定问题。

表2 交通仿真模型参数标定方法分类Table 2 Classification of calibration methods
3.1 低维度问题
以遗传算法(Genetic Algorithms, GA)、模拟退火算法(Simulated Annealing, SA)、禁忌搜索算法(Tabu Search, TS)为代表的元启发式算法能够在非线性、非凸性条件下寻找最优解,在模型参数校核中有广泛应用。然而,微观交通仿真软件参数多、随机性强的特点导致了元启发式算法的求解时间将随着参数数量增多呈指数增长,交通仿真无法在合理的时间内处理数千次的试验运行[33],计算负担较大。因此,元启发式算法适用于求解低维度仿真标定问题,相关文献整理如表3所示。人工神经网络对仿真模型参数与输出之间的关系进行学习,从而模拟仿真过程。该方法可以替代过长的仿真时间,有效提高标定效率。人工神经网络不能直接解决参数选取问题,常与GA算法等其他标定方法组合使用,且在应用时依赖于需要大量的训练数据,适用于低维度仿真标定问题,如表4所示。
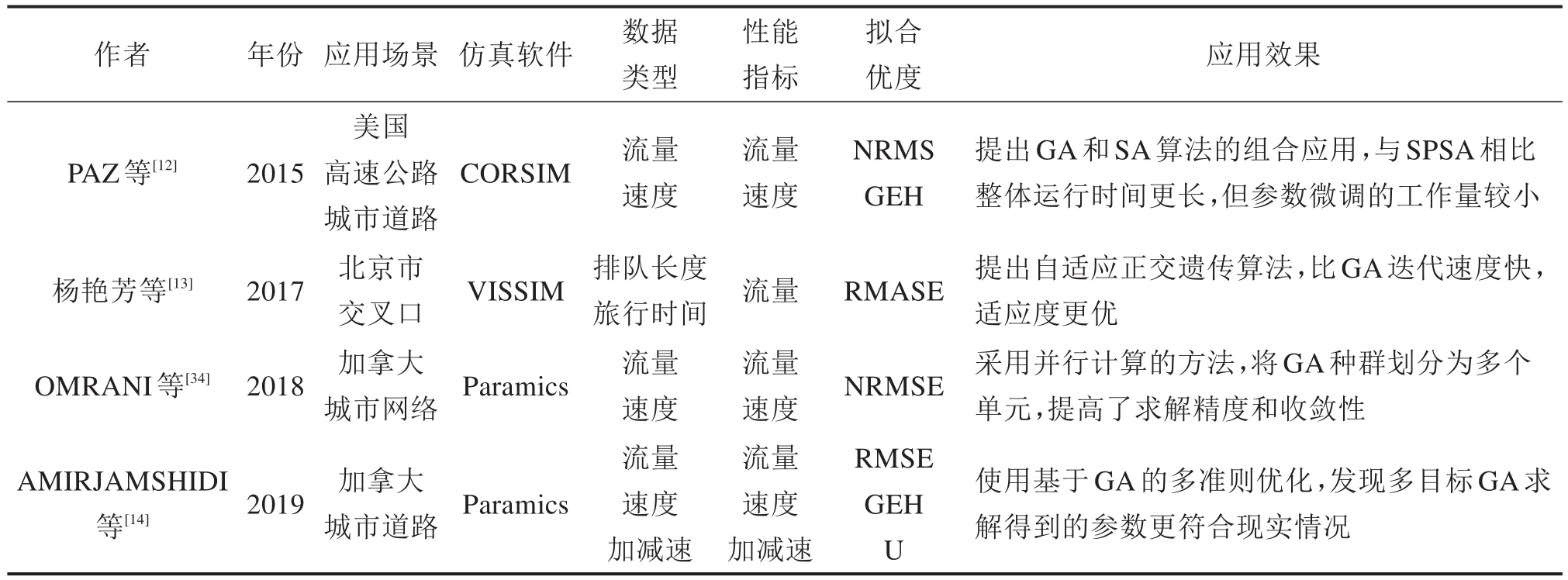
表3 元启发式算法的应用Table 3 Applications of metaheuristic methods

表4 人工神经网络方法的应用Table 4 Applications of artificial-neural-network-based methods
卡尔曼滤波方法常用于满足实时标定的要求,在线估计重要的模型参数(自由速度、临界密度和容量)和交通流参数(流量、平均速度和密度)。部分研究对输入进行一定的处理[37−38],或者加入OD流量的约束[39],以保证模型结果的收敛性。ZHANG等[40]使用约束拓展卡尔曼滤波降低OD矩阵标定中交通拥堵的影响,同时使用图着色的方法加快同步扰动随机逼近算法(Simultaneous Pertur‐bation Stochastic Approximation, SPSA)的求解速度,SPSA方法将在3.2节进行介绍。在第2节提到,在研究范围较小的情况下,还可以采用实验设计理论(正交实验法、拉丁方格法等)进行手动参数标定,从而选取代表性的参数组合。该方法的可移植性较低,在此不进行介绍。
3.2 高维度问题
为降低计算成本,以SPSA为代表的基于梯度的方法被广泛应用于仿真模型参数标定。该方法通过扰动所有参数取值计算梯度函数的近似形式,从而利用下降方向的信息获得新的参数集,减少计算量。SPSA的优点是计算量低,收敛速度快,适用于解决高维问题,但缺点[41]为:容易陷入局部最优,不能充分利用测量数据的时空特征,以及误差随着网络规模的扩大而累积,相关文献整理如表5所示。

表5 基于梯度的方法的应用Table 5 Applications of gradient-based methods
由于微观交通仿真参数标定问题缺乏封闭数学表达式,可以采用响应面方法解决该问题。响应面法,又称为代理模型或元模型方法,是指根据有限的模型输入和输出拟合复杂目标函数的近似函数,随后在简单近似函数上进行优化,以提高校核问题的求解速率。贝叶斯优化[17]、克里金法[3]等常被用于构造全局响应面,较人工神经网络算法进一步考虑到样本点集合的空间关联性,既能近似仿真过程,又能提升大规模仿真的采样效率。OSORIO等[42−46]首先提出了一种结合通用算法模块和物理算法模块的响应面方法。通用算法模块用于确保求解过程的渐近性质,物理模块则通过提供特定问题的先验信息加快收敛速度。如表6所示,研究者在后续研究中介绍了该方法在高维问题中的改进[16]及应用[47−48]。

表6 响应面方法的应用Table 6 Applications of response surface methods
4 交通仿真模型参数的自动化标定
交通仿真模型参数标定问题将仿真输出结果与现实数据差异最小化作为优化目标,是基于仿真的参数优化问题。仿真过程可用于刻画复杂仿真软件的输入输出关系,因此每一个目标函数的评估都需要进行仿真,导致运行时间过长。根据工作流程,交通仿真模型参数的自动化标定可分为分阶段标定和同时标定2类。分阶段标定将仿真模型参数标定问题分解为多个子问题,能够充分发挥已有数据价值,解释性较好。美国联邦公路管理局的指南[4]中提出了仅在关键瓶颈处依次标定通行能力、路径选择参数和系统状态的三阶段框架,在每一个步骤中都采用先全局调整,再微调的策略。而同时标定整个交通仿真工具,能够有效避免分解为子问题带来的有偏估计。如在动态交通分配模型校核问题中,采取迭代的方式对供需端参数进行共同调整,是考虑到交通系统供需交互的结构化标定过程。NAJMI等[50]指出不考虑参数之间相互作用的非结构化迭代校准中,参数的选择、调整方向和调整步骤较为主观,需要将基于活动的需求模型和交通分配模型之间的联系作为结构化标定的重点。然而,仿真模型校核后的参数值在数值上不一定与现实世界的观测值对应[51],同时标定会产生参数无法解释的情况,而分阶段标定能更好地解释仿真校核过程。考虑到分阶段标定中,子问题相互独立的假设在应用中难以满足,HOLLANDER等[6]提出了先分阶段校核,再同时校核的自动化实现思路。本文在已有研究的基础上,提出三阶段自动化标定框架,该框架可结合最新算法进行实现:
1) 输入已有现实数据,进行仿真软件内置模型选取与参数标定,输出为更符合现实场景的内置模型。
2) 输入为已有现实数据和仿真数据,输出更为准确的、用于仿真的交通需求,解决数据不完备对交通需求输入的影响。
3) 调整仿真中的其他参数,从而进一步加快收敛速度,该阶段将得到无法从真实数据中获取但对仿真有影响的参数组合。随后返回2进行继续迭代,以满足同时校核的要求。
5 结论与展望
1) 交通仿真模型参数标定旨在解决的问题是,如何通过建立一套完整的标定框架并对选取的交通仿真软件的参数组合进行优化,来提升交通仿真模型的有效性。交通仿真软件的待标定参数可分为需求参数和供给参数,从实际数据来源出发,可以对这些参数进行分别校核和共同校核,研究者常采用迭代的方式进行,以充分利用已知信息。
2) 标定方法和技术多围绕交通仿真的非线性、非凸性、实时性、高计算复杂度和缺乏封闭式数学表达的挑战进行改进。元启发式算法和以SPSA为代表的基于梯度的方法,可以解决非线性、非凸性问题,后者还可以加快标定效率;卡尔曼滤波方法可融合实时测量信息满足实时应用需求;人工神经网络方法和响应面方法通过模拟仿真过程,用于解决高计算复杂度、缺乏封闭式数学表达的问题。敏感性分析、主成分分析以及并行计算等方法也被广泛应用于解决上述问题。
3) 早期研究在手动校准方面进行了探索,但在可移植性上存在不足,本研究在现有自动化标定流程的基础上,考虑了分阶段标定的可解释性和同时标定的非偏性,提出三阶段仿真模型参数的标定框架。可应用于未来的微观交通仿真模型参数标定工作,也同样适用于宏观、中观交通仿真模型参数的标定问题。
考虑到已有研究的不足,未来研究工作可聚焦(但不限于)以下几个方向:
1) 研究融合领域知识的交通仿真模型参数标定方法。在数据知识的驱动下,目前的交通仿真模型参数标定方法由黑箱模型向可解析模型进行转变。研究者可以利用最新数据挖掘技术,研究交通仿真内部的交互机理,为理解交通仿真软件底层设置、融入新兴技术再开发提供支持,还可以结合机器学习方法对现有模型进行改进。
2) 研究面向多模式多智能体仿真的标定求解技术。多模式多智能体仿真能够反映交通系统内部的交互关系和层次结构,逐渐成为未来仿真工具的发展方向,但也为交通仿真模型参数标定带来了更多的挑战,如数据类型更庞杂、模型参数更繁复等。研究者可以结合前沿仿真平台,开发适用于最新问题场景下的自动化的参数筛选方法,即在计算资源有限的情况下,识别对仿真结果影响较大的参数并优先校核。
3) 研究面向本土化软件规范的交通仿真模型参数标定框架。我国现有研究在标定交通模型方面进展较快,但结合仿真软件的研究较少。交通行业常见的仿真软件多由国外开发,而仿真模型参数标定是仿真工具开发与应用的重点,因此国外相关研究依托于仿真软件的更迭而迅速发展。随着本土仿真软件的崛起,研究者在对国外技术规范“拿来主义”的同时,应尽快制定本土规范,填补市场空白与规避行业风险。
猜你喜欢
大电机技术(2022年5期)2022-11-17
童话世界(2020年32期)2020-12-25
汽车维修与保养(2020年11期)2020-06-09
中国交通信息化(2020年12期)2020-02-06
中国交通信息化(2019年7期)2019-10-08
船舶标准化工程师(2019年4期)2019-07-24
小学生导刊(2018年16期)2018-07-02
中国惯性技术学报(2017年1期)2017-06-09
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
燕山大学学报(2014年3期)2014-03-11