
马赛克战对指挥与通信领域的启示分析*
2022-12-12 08:22陈明德和欣
通信技术 2022年10期
陈明德,和欣
(1.中国西南电子技术研究所,四川 成都 610036;2.军事科学院系统工程研究所,北京 100039)
0 引言
美空军在2035 年愿景中提出了“作战敏捷”的核心理念,通过提高灵活性、速度、协同、平衡及力量几个要素,产生比对手更快地适应变化环境的能力[1-2]。近年来,随着编队协同、有人/无人协同以及蜂群/群集等新型作战样式的出现,未来战场呈现出了前所未有的动态复杂性,“分布、协同、智能、跨域机动”成为此类作战概念的主体特征,各分布式功能要素的有机组织与相互作用形成了该作战概念的基本体系架构。伴随作战环境的变化,体系中各要素间关系遵循建立—取消—和谐—冲突—再平衡的自适应演进的过程。
这种新的概念和样式来自认知范式的转变。机械还原论范式正在被有机体的网络进化范式所取代,从关注作战系统射程、投送能量、生存力等物理域静态指标参数,到关注平台、信息共同构成的信息物理系统的综合能力,再到关注分布式功能单元自组织的动态博弈进化能力。
未来战场,要控制与适应由对手敏捷性塑造的动态变化、强不确定性的空战场,按照固定任务模式,依赖单一杀伤环路中机动性和生存力强的少量平台难以达成目标。唯有基于有效协同的、大量分散的功能单元,通过不断创建空中、空间、网络等多域的组合能力,产生数量众多的候选OODA 价值链和任务聚合体,并经过优胜劣汰,才能应对瞬息变化的环境。由这些分散的功能单元主宰的领域将成为未来战场的基本形态。
在此背景下,美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)战略技术办公室(Strategic Technology Office,STO)于2017 年公布了马赛克战的概念和构想并持续推进该项目[3-5]。
本文首先对美军马赛克战的概念、内涵以及其对未来战争形态影响和塑造进行深入分析;其次对马赛克战在军事应用过程中需解决的关键技术问题进行总结提炼;最后在此基础上,进一步探讨马赛克战对未来指挥与通信领域发展的影响。
1 马赛克战内涵
1.1 马赛克战概念的提出与发展
马赛克战概念最初由DARPA STO 在2017 年8月公布,旨在发展动态、协同、高度自主的作战体系,逐步并彻底变革整个装备体系和作战模式。
2018 年9 月DARPA 在其60 周年研讨会上,对马赛克的作战概念作了深入阐述和全面推进。2019 年3 月2 日,DARPA 发布马赛克战跨部门公告,该公告指出,美军几十年来依靠绝对先进和高水平的武器装备而取得的领先于世界的态势,正受到来自势均力敌的对手的挑战,而研发更大、更快、更强的新型装备来保持军事领先地位的做法已经难以维持。由此,一种新的作战能力生成范式应运而生,快速、灵活、自主地组合各战斗要素,形成满足特定任务需求的体系作战能力,这就是马赛克战。与此同时,公告对马赛克技术、试验以及基础战略等进行了研讨,是该作战概念的全面落实。2019 年9月11 日,米切尔航空航天研究所(Mitchell Institute for Aerospace Studies)发布了关于马赛克战的研究报告《恢复美国的军事竞争力:马赛克战》,报告对马赛克战的概念以及如何实施进行了阐述。
2020 年2 月26 日—28 日,美国空军协会空战研讨会在奥兰多举行,其中一个议题是“马赛克战:实施多域战”。参加研讨的嘉宾包括美国空军米切尔航空航天研究所所长David Deptula、米切尔航空航天研究所高级常驻研究员Heather Penny、DARPA STO 主任Tim Grayson,他们就如何在马赛克战概念下实施多域战,如何更好地闭环“杀伤链”,进而构建“杀伤网”等发表了各自的观点。
目前,马赛克战概念已经牵引了一系列技术项目的发展,在DARPA 的2020 财年预算中,相关项目占到总项目数的21%,经费占比高达35%。
1.2 马赛克战内涵
马赛克战一词由DARPA STO 的Thomas J.Burns和Dan Patt 最先创造并使用,最初的构想是把作战平台中的各项作战能力进行抽象,并比作马赛克片,作战指挥官在遂行任务过程中可以根据需要任意组合和调用,以满足任务需求,如图1 所示。
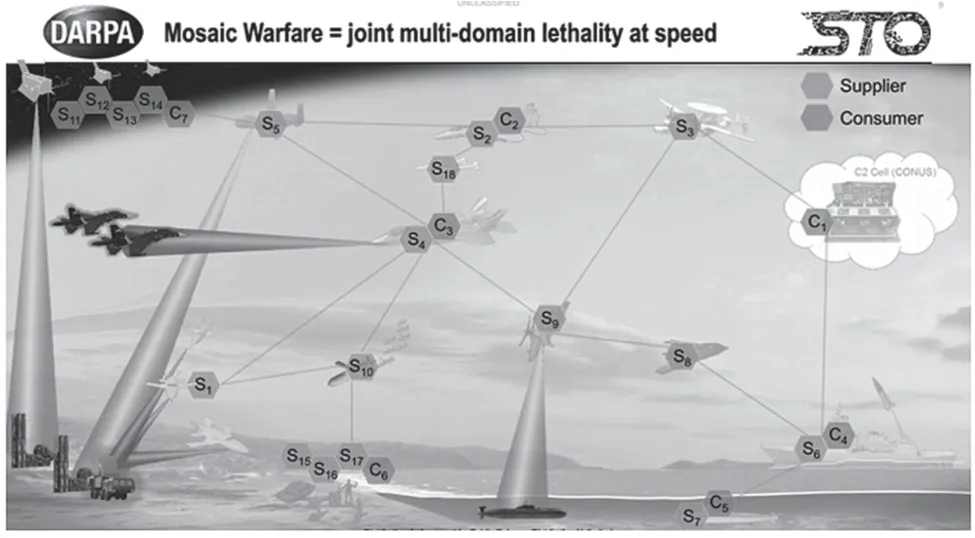
图1 马赛克战内涵
按照DARPA 描述,马赛克战的目标是提供快速、可扩展、自适应的联合多域杀伤能力,它将杀伤链的发现、确认、跟踪、瞄准、交战、评估(F2T2EA)功能分布在所有域中的有人或无人平台上,并通过信息网络对这些能力进行快速的重组和连接,进而形成快速、可扩展、自适应联合多域杀伤力,支持快速重构。该策略将使对手面临大量、可自由组合的杀伤能力威胁,使得战场态势更加复杂,加重了敌方认知负担,从而实现不对称优势。
现有作战系统中,杀伤链较多集中在少量平台,一是容易遭受敌方破坏,二是任务适应性不强,难以升级扩展。相比而言,马赛克战则充分利用了分布式协同概念,将各种传感器、通信网络、指挥控制系统、武器系统或平台抽象为杀伤链上的各个能力单元,并通过网络信息系统将这些单元连接起来,然后单元之间动态协同组合和进化,形成一个极具弹性、灵活机动的作战效果网,达到先敌发现、先敌攻击的效果,并且具有风险分散、可快速重构的特点,单一杀伤链和多域自适应杀伤网的对比如图2 和图3 所示。
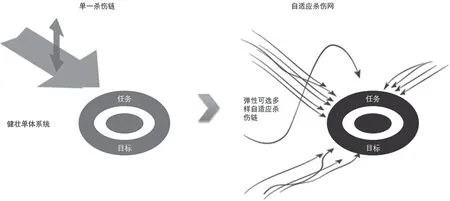
图2 单一杀伤链和多域自适应杀伤网的对比

图3 当前杀伤链时效和马赛克战
图4 描述了杀伤链演进过程,从“自闭环”发展到“系统之系统”,再到“杀伤网”,最后一直到“马赛克战”,呈现出从集中到分布再到分散的趋势。相应的,杀伤链本身的灵活性、扩展性、适应性和复杂性不断增强[6-9]。
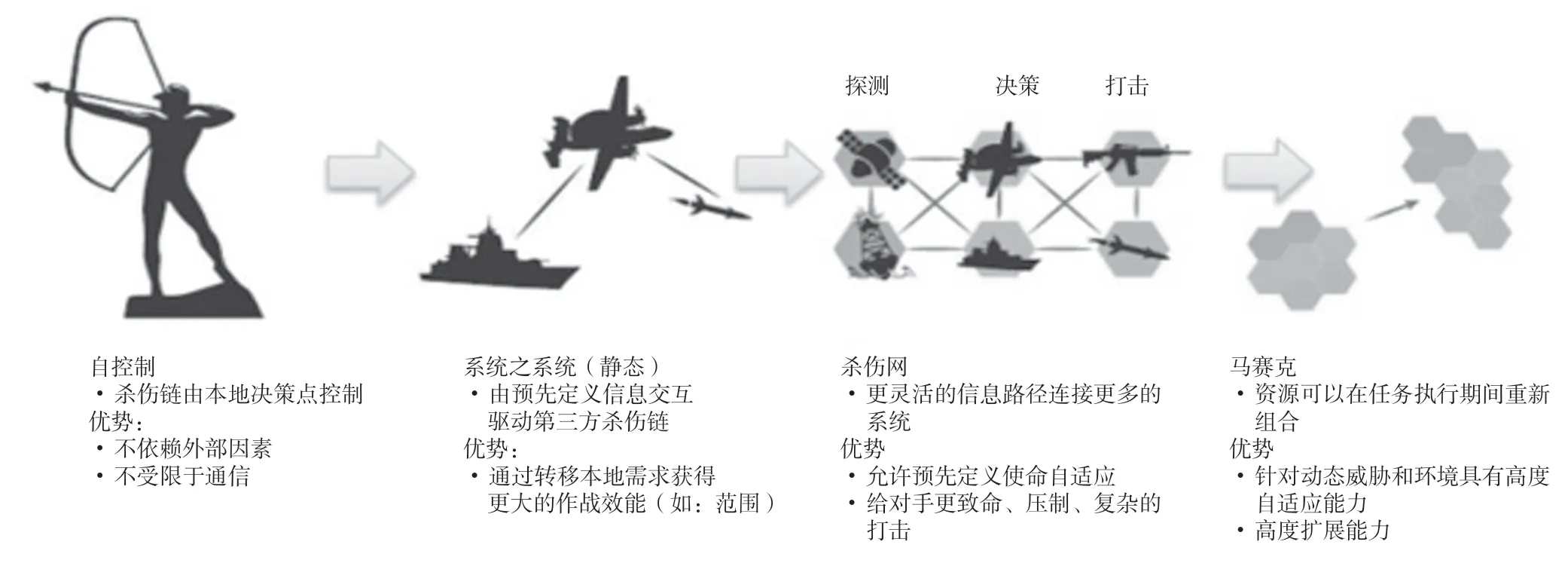
图4 杀伤链的发展演进
马赛克战一方面代表了作战概念的发展演进,另一方面也诠释了一种装备体系发展的全新范式,即从发展“强平台”向构建“分散、分布式能力系统”转变。就美空军而言,其核心武器装备,如F35、F22 等战机平台,开发周期长、费用高、升级维护也比较复杂,全体系运行主要依靠核心装备的正常运转。在作战过程中,一旦核心装备遭到攻击,就可能会面临杀伤链体系性崩溃风险。而马赛克战概念中,杀伤能力是通过抽象和协同“简单”能力单元构成的,而能力单元的承载平台,可以是一些开发周期更短、价格更为低廉的装备。同时,这种去中心化设计,也增加了体系的鲁棒性。
1.3 马赛克战主要特征
通过对马赛克战的内涵分析可知,其主要具备分布、协同、智能、跨域的特征。
1.3.1 分布
分布的基础是多个作战单元共同行动。分布除了指物理空间的分散,还包括各单元任务功能、所处作战领域的不同,更有有人、无人的类型差异。在马赛克战体系中,杀伤链的功能被分布在大量、多样的装备平台上。由于这些平台分散部署,处于不同的空间位置,给作战带来了很多新变化,分散了杀伤链的系统性风险,同时提升了系统的复杂性。
1.3.2 协同
协同是指能够敏捷地组合杀伤链上多个能力单元和过程,从而最有效地创建预期的能力。协同除了指作战单元在时间、空间上的配合,还包括多种功能的有机组合,以及任务过程不同阶段的紧密衔接。在马赛克战概念中,需要根据战场上的态势,动态地统筹、调度和协同各种资源;然后通过协同和组合,实时地进行杀伤链的“动态”装配;再在任务过程中,动态进化,形成最优的自适应杀伤网络;最后通过协同,使得体系能力能够在不断的动态博弈中获得对地优势。
1.3.3 智能
在马赛克战概念中,作战系统需要具备在对抗环境中创建杀伤能力组合并不断自我进化的能力,这要求系统具备强大的智能自主能力,包括单体、系统以及博弈对抗3 个方面的能力。单体智能是指个体应具备的环境感知、判断与行动能力;系统智能强调以任务价值网络为核心进行系统构建;对抗博弈智能是指产生领先于对手的行动方案和任务组合,并快速筛选出有效策略。
1.3.4 跨域
马赛克战的概念强调杀伤链的灵活性、扩展性、适应性和复杂性,应用在空、陆、海、天、电磁、赛博等不同作战领域,根据任务需要的配置和组合能力,支持产生多域连接的价值网络,形成高维制衡低维的优势。
2 马赛克战应用中的关键技术问题
马赛克战是一个新型的战争形态设计,要将该理念在军事行动中进行部署和应用,还需要突破如下4 个方面的关键技术。
2.1 弹性灵活的分布式网络化协同操作系统
在马赛克战概念中,杀伤网络的能力形成离不开如下几个部分:
(1)对各类型作战平台上的能力单元抽象,如感知能力、处理能力、攻击能力等;
(2)智能跨域协同组织、决策控制与管理;
(3)高效的跨域协同处理算法;
(4)对抗性空间内高性能数据链网络。
整个系统的杀伤效能由上述要素在整个作战活动时空内通过相互作用达成,如图5 所示。其中,作战单元的能力模型、数据链网络是系统的主要资源;智能化协同管理是整个体系的核心控制面,完成智能化协同管理、资源最优配置以及跨域协同处理。

图5 杀伤能力形成原理
而如何高效组织各个部分,进而构建完善的作战系统则首先需要具备一套跨域、分布式、通用化的多平台协同操作系统。本文给出了该系统的一个基本构想,如图6 所示。

图6 弹性灵活的分布式网络化协同操作系统
整体上,该系统分为平台能力抽象层、协同控制处理、应用服务层3 个层次。
(1)平台能力抽象层。该层通过互操作规范定义和映射处理,支持对各类平台的能力进行建模,并将其抽象为杀伤上分布的能力单元,包括感知能力、处理能力、攻击能力等,并进行统一表征和发布,如图7 所示。

图7 多域平台的能力抽象、表征与发布
(2)协同控制处理层。该层提供了控制和处理两个方面的算法能力集合,支持根据任务需求,对抽象的能力单元进行调度、分配和重构控制,支持为能力单元间的协同提供算法处理,进而为杀伤链各环节的能力形成提供支撑。
(3)应用服务层。该层提供典型协同应用生成与运行环境,支持根据当前任务需求和作战环境构建对应杀伤链各环节能力需求的应用服务。
分布式网络化协同操作系统是马赛克战应用的基础和核心,是体系能力发挥的重中之重。其中,能力抽象表征层需要重点关注效率、开放性、可扩展性,这将成为未来接入体系的任何平台的基准规范;协同控制处理层需要重点关注适应性、完备性;应用服务层的构建则需要考虑灵活性、鲁棒性和系统的弹性。
2.2 机器—机器的敏捷智能认知交互技术
实现机器—机器的敏捷认知交互是马赛克战提供快速、分布式、可扩展、自适应联合多域杀伤能力的重要支撑。近年来,随着智能认知技术的发展,从数据形成知识再到用于认知理解的环路基本清晰,为解决机器—机器的认知交互,形成意图一致的共同体提供了契机。感知—知识—认知交互的过程如图8 所示。

图8 感知—知识—认知交互的过程
因此,一是需要聚焦马赛克战中跨域组合构建及能力涌现的过程,即面向大量跨域、异质平台,分析探索信息获取、理解、知识形成、协同交互以及再获取的复杂循环过程,完善环境认知、个体认知、群体行为及能力进化认知各个环节;二是研究构建跨越比特交互、认知理解直到意图统一的认知交互模型、逐层渐进式交互策略以及基于模型映射构建成员间统一认知理解的方法,实现聚合体成员在意图层面形成共识。
2.3 强对抗空间内的智能进化网络技术
数据链网络是分布式系统能力形成的基础支撑。在马赛克战中,数据链网络需要支持跨域的大量、异构平台间机器—机器的互操作,并且能随着任务过程不断进化。现有通信数据链网络在应对上述应用需求时,在动态适应性、可扩展性以及网络性能等方面均存在较大的问题和差距,需要在架构、模型和机理等方面重塑网络形成和演进,即通过敏捷感知、深度理解,在复杂战场空间内发现并利用任何可行“资源形态”,为分布式的单元或组合实时生成最佳匹配的通信网络解决方案和处理算法,将通信网络性能推升到峰值,使作战应用能够在对抗性空间内获得全新体验,强化并催生新的作战效能。
为此,建议从如下几个方面开展研究:
(1)网络与作战需求的适配能力从固定适配向动态适配跨越。通过作战意图感应、动态网络资源调用实现通信网络与作战需求的无缝衔接和精确匹配,真正实现通信网络无感化应用、通信网络与战术行动匹配,带来作战网络使用体验质的提升。
(2)通信能力从静态固化预设计向在线动态组装生成跨越。通过作战环境感知适配最优波形能力,将波形能力微细化分解,各组成要素切片化设计,在线动态组装生成最贴切的波形,实现通信能力的在线进化。
(3)抗干扰能力从被动的静态抗干扰模式向主动的动态规避干扰模式跨越。通过感知电磁频谱环境、编队网络工作性能,综合调用时间、空间、频谱资源,以灵巧的自适应干扰规避策略与网络成员同步协作感知技术,实现抗干扰能力全面大幅提升,可以有效应对未来采用自适应电子战行为学习的认知电子战技术。敏捷的抗干扰技术将革命性重塑通信网络的可靠、安全、抗毁能力。
2.4 分布式智能决策控制技术
分布式智能决策控制是构建和重塑分布式杀伤能力的决策核心[9],也是马赛克战中组合创建、能力生成与进化的关键。近年来,随着人工智能技术的发展,智能和自主正在不断融入和深刻变革作战形态。通过发展智能决策,有助于实现人与机器的深度融合,即实现机器的精准和人类的创造性完美结合,一方面利用机器智能处理能力速度辅助人类做出最佳判断,以协助提升认知和决策的速度和精度;另一方面利用机器的自主性,提升指挥官决策控制的层级,减少在执行层次的精力分配,使得指挥官能够同时控制分散部署的跨域平台,动态适应环境或对手行动,提升整个系统的能力和敏捷性。
分布式智能控制决策控制核心需要解决的主要问题包括:通过对战场实时态势的认知计算,构建生成最佳的分布式协同杀伤网或调整决策;通过智能控制和资源调度,完成能力形成并不断进化,以动态适应和匹配任务需求。
本文给出一个基于多智能体协同进化的智能决策引擎实例,如图9 所示,该方法有助于解决在组成形成以及资源调度过程中涉及的多约束满足、资源冲突以及局部最优与全局最优博弈等问题。
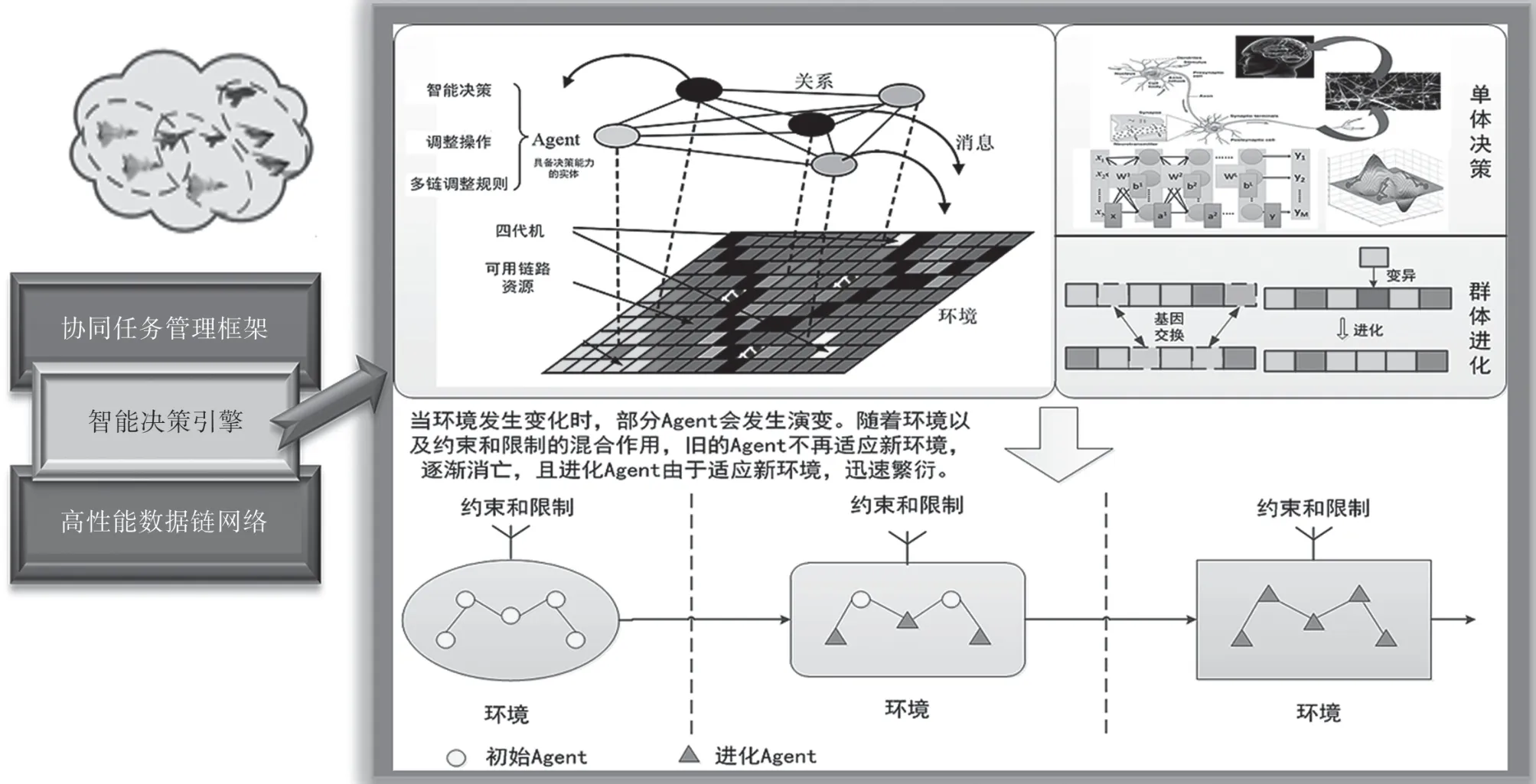
图9 智能决策处理引擎
3 对指挥与通信领域发展的思考
马赛克战是一种新的作战范式,其概念内涵和系统构建的逻辑将对未来指挥与通信领域的发展变革产生较为深远的影响。
3.1 推动指挥控制和战场管理发生变革
马赛克战概念提出前后,DARPA 在指控控制和战场管理等方面提出并实施了一系列项目,包括:分布式作战管理(Distributed Battle Management,DBM)、对抗环境中的弹性同步规划与评估(Resilient Synchronized Planning and Assessment for the Contested Environment,RSPACE)、驾驶舱机组成员自动化系统(Aircrew Labor In-Cockpit Automation System,ALIAS)、进攻型使能集群战术(OFFensive Swarm-Enabled Tactics,OFFSET)以及空战演进项目(Air Combat Evolution,ACE)。本文通过对上述项目进行分析并结合马赛克战对指挥控制的需求,总结出指挥控制未来发展的几个趋势。
3.1.1 架构从“集中式”向“弹性分布式”转变
马赛克战从兵力部署到过程组织再到能力形成和进化的过程中的一个核心特点就是分布式,这也要求指挥控制具备弹性分布式特征。
现有指挥控制体系采用集中控制、分步实施的架构实现自顶向下的精确指挥和行动控制,然而,面向未来分布式作战,该模式存在决策环路过长、效率低、适应性、扩展性和鲁棒性不强等问题。为此,需要构建一种新型的弹性分布式指控架构,支持分布式的自适应规划与控制、分布式态势理解、分布式的资源调度与控制以及分布式的自动化辅助决策系统,支持在不同作战阶段对作战资源进行分布式、自动化、智能化的调度管理,提升复杂战场环境下各作战平台的体系作战能力。
3.1.2 模式从“网络中心”向“决策中心”转变
2020 年2 月11 日,美国战略与预算评估中心(Center for Strategic and Budgetary Assessments,CSBA)发布研究报告《马赛克战:利用AI 和自主系统实施以决策为中心的作战行动》。提出实施以决策为中心的马赛克战,以保障美国在大国竞争中重获并保持优势。
“决策中心”是相对于“网络中心”提出的概念。在对抗性战场空间内,网络通信基础设施时常遭到破坏,可靠性与稳定性将会受到影响。基于该前提,“决策中心”式指控将遵循资源可用性原则构建;而“网络中心”式指控则是先构建了一个理想化指控架构,但该架构需要一个高性能、泛在的弹性网络来支撑实施,这在高度对抗的作战空间内是难以实现的。“决策中心”战中使用的指控与通信是以场景为中心进行构建的,使指挥能够对设施根据战场态势、资源条件,动态、灵活地开展指挥控制,充分利用已有的资源,动态分布式地生成杀伤能力组合,并及时调整。
3.1.3 处理从“人”向“人机智能”转变
如图10 所示,将人工指挥与机器控制相结合,可充分利用人与机器的各自优势。人类提供了灵活性及创造性见解,而机器则提供了速度与规模,二者相结合能够满足指挥官对大量分散分布的跨域平台的指挥控制需求。
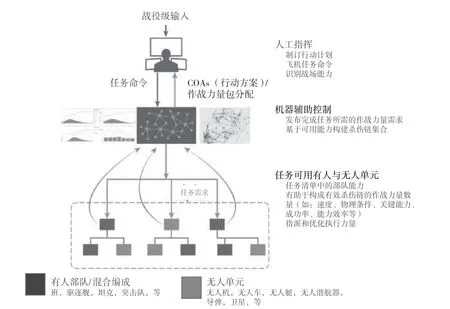
图10 基于人机智能的指挥控制
在该模式下,指挥官制订了一套整体行动方案,以反映其策略及上级意图,并通过人机接口赋能机器控制系统。机器赋能控制系统通过确定可承担作战任务的力量,确保指挥官拥有必要的指控权限,来实现以场景为中心的通信指控。然后,指挥官在机器智能的辅助下,选择任务参与单元,生成杀伤能力组合,并不断进化。在此过程中,时间和效率是极其重要的因素,而机器智能在执行效率上相比传统筹划流程有量级的提升,也同时给对手制造了更复杂的场景。
3.2 推动通信网络发生变革
马赛克战体系要求通信网络能够连接所有的分布式系统,而通信网络构建将基于DARPA 原有通信组网项目的成果,包括满足任务最优化的动态适应网络(Dynamic Network Adaptation for Mission Optimization,DyNAMO)项目、对抗环境下的通信(Communications in Contested Environments,C2E)、九头蛇(Hydra)。同时,DARPA 新启动了一系列的通信组网相关项目进行补充,主要包括保护前线通信(Protected Forward Communications,PFC)、海洋交战即时信息(Timely Information for Maritime Engagements,TIMEly)、基于信息的多元马赛克(Information Based Multi-level secure Mosaics,IBM2)项目[10-11]。本文通过对上述项目进行分析,总结出马赛克战对通信网络架构、组网、传输和认知交互等方面的需求。
3.2.1 构建全新的弹性信息网络架构
传统的通信数据链系统设计以保障指挥所到作战编队以及编队间的可靠通信为主要目标,网络本身的拓扑架构较为简单。在高烈度冲突对抗环境中,维护前线到后方指挥所间长距离的可靠通信极其困难,更为有效的方式是在战术平台间构建一个持久、鲁棒的网络。基于隐蔽、抗干扰的链路设计,多信道、多频段和多体制的聚合,自组织、自优化的弹性网络架构,形成任务驱动,高度弹性、抗毁、顽存的信息网络。通过信息网络对探测、光电、火力、电磁、预警指挥、机载防御等各作战功能单元的体系化集成和缝合,实现马赛克战功能的聚合,构建多个并行、高度分散的弹性杀伤网。
3.2.2 采用基于任务驱动的自适应组网技术
在高度对抗环境下,作战任务的执行将面临更多的不确定性:一是威胁和作战环境不确定性,随时可能出现任务前无法预判的威胁或者目标;二是信息保障环境的不确定性,以及信息环境的限制和模式使得事先确定的任务协同模式和作战样式无法实施;三是平台、状态及可用性与任务前的估计偏差将导致实现的规划不可用。
因此,需要采用基于任务驱动的自适应组网技术,分析作战任务与网络结构的匹配关系,预测网络的演化,并通过网络资源的灵活控制,自动发现、识别、连接相关作战单元,在恰当的时间构建任务群组间瞬时连接,将正确的信息按照服务质量交互给正确的作战单元。
3.2.3 提升强对抗环境下的通信传输技术水平
马赛克战的强对抗、穿透式的战场使用环境对通信网络提出了苛刻的要求,具体为:
(1)极低的数据延迟、极高的低探测概率(Low Probability of Detection,LPD)和抗干扰(Anti-Jam,AJ)能力以及极高的数据传输速率(短时);
(2)高可用性,即高机动、高对抗下的可靠信息交付;
(3)更大规模的网络,即从隐身编队升级为隐身集群。
为实现高度弹性、抗毁、顽存的信息网络,需重点突破以下几个关键技术:
(1)低时延抗干扰大容量传输技术。针对分布式协同探测、分布式电磁协同、网络化制导、弹间协同等时敏要求苛刻的武器协同应用需求,开展低延迟高效接入等技术研究。
(2)多波束低时延LPD、低截获概率(Low Probability of Intercept,LPI)宽带传输技术。针对自主作战大规模协同、有人/无人协同、无人编队作战等对大容量、低延迟、多功能(测控、指令、态势、协同数据)传输和灵活组网的需求,研究多波束、多功能网络。
(3)空—空远距离高速激光或射频一体传输技术。针对自主作战下无人平台分布式协同探测、分布式协同电磁对极高传输速率的要求,发展机载激光射频一体化通信技术,需解决快速捕获与多级对准跟踪、大气信道传输和基于自适应光学的波前畸变校正、小型化端机设计、激光和射频链路的复合传输调度与控制以及基于单光子的加密传输和密钥分发等技术。
(4)机载智能通信技术。基于认知驱动的传输波形在线生成和不断进化的方法,将通信传输理论与智能算法深度融合,微观上实现频带资源利用、调制、编码、信道估计等的在线聚合和动态进化,宏观上完成整体传输波形体系的精准调教。
3.2.4 使用智能信息认知交互技术
随着智能认知技术的发展,从数据形成知识再到用于认知理解的环路基本清晰,为在马赛克战体系中使用智能信息认知交互技术解决机器—机器认知交互,形成“意图一致的共同体”提供了契机。一是基于语义的模型化表征、逐层渐进的认知交互机理,实现跨平台、跨域的智能信息交互和能力集成,构建强可扩展、互操作、智能交互模型,实现机器—机器的互认知、互理解,构建拟人化的敏捷交互;二是基于军事需求研究的数据链作战用例,依据平台间交互的战术信息要素,制定统一的消息表征模型,并向下兼容已有消息标准。
4 结语
马赛克战作为一种全新的作战概念,其概念内涵和系统构建的逻辑必将对未来通信指挥领域的发展变革产生深远的影响。本文在对美军马赛克战概念、内涵以及其对未来战争形态影响和塑造深入分析的基础上,总结提炼了马赛克战在军事应用过程中需要解决的分布式网络化协同操作系统、敏捷智能认知交互技术、智能进化网络、分布式智能决策控制等关键技术。针对马赛克战的技术特点和作战模式带来的挑战,未来通信指挥领域中,指挥控制架构应从“集中式”向“弹性分布式”转变,处理应从“人”向“人机智能”转变。通信网络方面,应构建全新的弹性信息网络架构,突破强对抗环境下通信传输技术,使用智能信息认知交互技术,这对未来通信指挥领域发展和研究具有一定的指导意义。
猜你喜欢
世界建筑导报(2022年2期)2022-04-25
计算机与网络(2021年4期)2021-05-04
科学大众(2020年23期)2021-01-18
汽车观察(2019年2期)2019-03-15
能源(2017年10期)2017-12-20
文艺生活·中旬刊(2017年8期)2017-09-15
能源(2017年5期)2017-07-06
侨园(2016年5期)2016-12-01
中国卫生(2016年5期)2016-11-12
雷达与对抗(2015年3期)2015-12-09
