下肢外骨骼被动式弹簧机构组合仿真与分析
2022-12-11 02:38俞建荣吴拓达马丽梅关少亚曹建树
制造业自动化 2022年11期
俞建荣,吴拓达,马丽梅,关少亚,曹建树
(1.北京石油化工学院 机械工程学院,北京 102617;2.北京石油化工学院 工程师学院,北京 102617)
0 引言
下肢助力外骨骼机器人已应用于医疗康复、日常生活、工业、救灾及军事等领域[1~4],传统的下肢助力外骨骼机器人采用刚性机构驱动关节时,其自身重力和助力会集中于使用者的局部皮肤,导致不适甚至摩擦损伤[5]。被动式弹簧机构可以有效减少应力集中,还可以在运动中循环储存和返回能量,从而减少运动中的能量消耗。这使得它们成为可穿戴下肢外骨骼的重要组成部分[6]。为了迎合社会需求,近年来中外相关研究机构积极对下肢外骨骼进行研究。清华大学设计了一种无动力储能式偏瘫助力外骨骼机器人(ES-EXO),对储能单元结构的弹簧位置和刚度进行了优化,实验结果表明,通过优化储能元件,髋关节屈曲力矩降低37.2%[7]。麻省理工学院的Conor James Walsh设计了一种被动式下肢外骨骼,在膝关节处安装可变阻尼器,髋关节和踝关节处使用定刚度弹簧以达到储能、助力的效果[8]。荷兰代尔夫特理工大学设计了一种四自由度的髋关节助力外骨骼机器人,通过增添平行于下肢的板簧的方法,提高外骨骼髋关节周围的力矩以降低人体行走的代谢能耗[9]。苏黎世联邦理工大学机器人与智能系统研究所提出在髋关节前放置被动储能式弹簧,测试水平行走过程中弹簧对腿部肌肉力量及活动范围的影响[10],但是并未考虑添加被动式弹簧机构对人体骨骼应力形变的变化情况。在外骨骼设计的初级阶段,往往不能准确地确定应力形变集中区域,为了提供给使用者稳定支撑和安全保障,必须明确髋关节的力学特性以实现更优的穿戴体验及助力性能[11]。本文构建接近人体实际生理状态的髋关节有限元模型,计算大收肌、半腱肌刚度值并利用弹簧进行模拟,分析比较双腿和单腿静止站立状态下不同被动式弹簧机构组合髋关节的应力和形变,得到最优方案组合,该方案可以为下肢助力外骨骼的构型提供借鉴。
1 研究方法
1.1 静止站立时人体下肢受力分析
髋关节是我们人体最大的一个关节,是连接躯干和下肢的多轴性球窝关节,主要驱动下肢完成步态运动、缓解身体负荷造成的冲击和振动[12]。肌腱-肌肉单位在人体动作的实现中起着重要作用,大收肌和半腱肌是下肢重要的肌肉。在下肢外骨骼研究中,如何减少髋关节所受载荷是提高外骨骼穿戴舒适度,减少应力集中的关键[13]。根据生物力学原理,人体静止站立时髋关节受力情况如图1所示[14]。
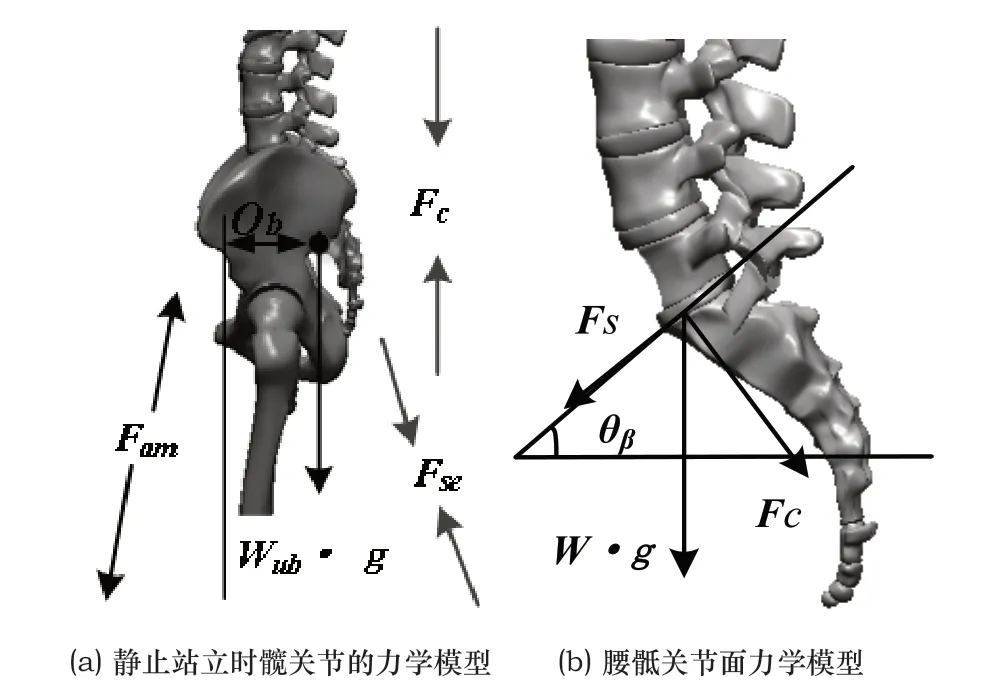
图1 静止站立时人体下肢力学模型
脊柱是人体的框架,支撑人体对抗地心引力。腰骶关节位于腰椎和骶椎之间,由于腰椎骶椎连接处是倾斜的,因此髋关节处受到压力和剪切力的作用,压缩力Fc(N):

其中,Wub(kg)为人体上半身质量,θφ(°)为腰骶关节S5—L1梯度角,g(Nm/s2)为重力加速度,Fse(N)为半腱肌产生的压缩力,Fam(N)为大收肌产生的拉力。半腱肌收缩,大收肌拉伸以平衡髋关节力矩Mac(Nm):

其中,Dse(m)、Dam(m)分别为大收肌和半腱肌的力矩臂。髋关节力矩还可以表示为:

基于仿生学原理,从以上几点来判断,减少髋关节力矩能够通过减少髋关节和肌肉的受力来实现,根据实验结果可以对下肢外骨骼的被动式弹簧机构设计进行优化,提高下肢外骨骼的支撑性及舒适性。
1.2 肌肉及韧带约束参数求解
骨组织间的肌肉及韧带主要提供拉力,因此在有限元仿真计算过程中,肌肉及韧带以弹簧的形式将拉力施加在相连接的骨组织上。其中,分配给各个弹簧的刚度值ks可以通过下式进行计算[15]:

其中,As表示与被动式弹簧连接节点的皮质表面积,AML表示与肌肉或韧带连接的总皮质表面积,表示分配给肌肉或韧带的等效长刚度,指肌肉的等距(静态)刚度,表示紧张状态下肌肉的张力单位,LMT表示从起点到插入点之间肌肉或韧带的长度,表示放松状态下肌肉或韧带的平均长度,cosβ表示肌肉或韧带相对于肌腱的定向角度。
1.3 非线性单元有限元求解
骨组织作为典型的弹塑性结构,其材料的应力-应变关系为非线性的,考虑塑性的应变方程形式为[16]:

其中,dεp、dεe分别为塑性应变增量和弹性应变增量。dεp服从流动法则,dεe服从Hooke定律:
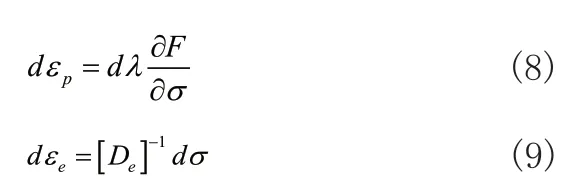
其中,F为应力的加载面,[De]为材料弹性矩阵,dσ为应力增量。根据Mise屈服准则,可得到弹塑性材料增量形式的应力-应变关系:
五是助力城市副中心餐饮服务业品质提升。组织了通州区烹饪大赛,共有40多家企业、近百名选手参加了中式烹调和面点制作的比赛,以赛代训,发挥协会桥梁纽带的服务职能,为城市副中心餐饮企业服务提升奠定了基础。

其中,[Dp]为材料塑性矩阵,为等效应力,Sij为偏量应力(i,j=x,y,z)。选用有限单元方法,应变{ε}和单元节点{de}之间的关系[17]:

式(13)中:

其中,[B]为单元应变矩阵,[BNl]为非线性部分,[BL]为线性部分,[BL]为常数[B0]和一次函数[BL1]之和。根据上述各方程式,选用虚功原理来推导,能够得到增量形式的单元平衡方程:

式(16)中:

其中,[Ke]o为小位移线性刚阵,[Ke]σ为由大变形引起的初应力刚阵,[Ke]L为单元应力水平决定的大位移刚阵。
2 有限元模型建立及参数设置
2.1 下肢骨骼模型建立
本研究所涉及的骨组织模型,均借助Mimics软件进行三维重建。通过选取合适的阈值完成对Dicom格式的CT切片数据中骨组织的分割与提取,并对分割结果进行人工检验,剔除分割结果中的非骨组织区域。通过区域生长及面绘制算法,得到最终的人体下肢骨组织模型。
2.2 下肢骨组织及软组织的材料赋值
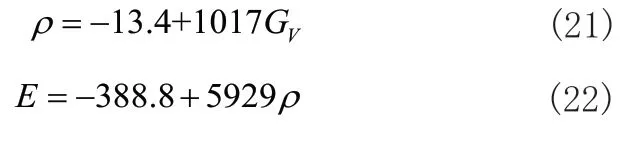
人体骨组织的弹性模量、骨密度等都是不均匀的特性参数,故将骨组织视为各向异性材料,划分为密质骨和松质骨。Mimics中常用的度量单位有CT值和灰度值两种:Hounsfield units(Hu)、Grayvalues(Gv),二者关系为[18]:

将灰度值在1685以上的定义为密质骨;将灰度值在1170~1683范围内的定义为松质骨,泊松比均设置为0.29。按照经验式(2)、式(3)计算得出密度(ρ)及弹性模量(E)数值,并对下肢三维模型进行赋值[19]。
通过式(4)~式(6)计算得出大收肌、半腱肌等效刚度值分别为6.95×10³N/mm和3.67×10³N/mm,张力状态下骶骼结节韧带的等效刚度值为1.5×10³N/mm。
2.3 有限元模型前处理
2.3.1 网格划分
将完成材料赋值的下肢骨组织模型导入Workbench中进行网格划分,选取两侧骼骨采用2mm的四面体单元,骶骨、股骨等采用0.4mm的四面体单元。该网格划分方式可以在保证有限元模型的网格质量的同时,提高仿真计算效率。
2.3.2 设置边界条件
实验数据来自于成年女性,体重70公斤,征得患者知情同意,报备伦理委员会批准同意。有限元模型边界条件的设置[20]:
1)模拟双腿静止站立姿态,髋关节承受的载荷约为体重的60%,即G=420N,对于膝盖关节软骨及胫骨施加完全约束;
2)模拟单腿静止站立姿态,髋关节承受的载荷约为体重的81%,即G=567N,载荷方向及约束位置与1)相同。
由于正常人皮质骨之间仅能产生微动,故将模型中各骨骼之间设定为绑定接触;而软骨与皮质骨之间存在一定的相对运动,故设定趾骨联合处一侧为绑定接触,另一侧为不分离接触,如图2所示。

图2 边界条件
3 实验及结果
3.1 四种不同的并联被动式弹簧机构组合
模拟四种并联被动式弹簧机构组合形式:模拟大收肌(AM),模拟半腱肌(SE),模拟大收肌、半腱肌(AS),模拟大收肌、半腱肌及骶骼结节韧带(AE)。其中线性弹簧只拉伸,不压缩,如图3所示。分析静止站立状态下,双腿站立及单腿站立两种情况下,四种不同的并联被动式弹簧机构作用下髋关节的受力情况,得到最优的被动式弹簧组合模式。
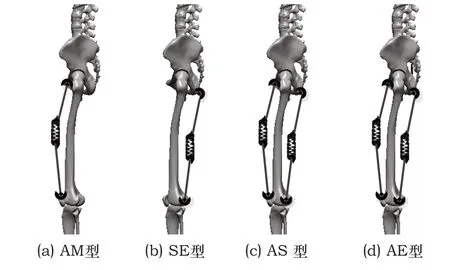
图3 四种并联被动式弹簧机构示意图
3.2 双腿站立时不同并联被动式弹簧机构组合作用下髋关节的应力及形变分析
经过有限元分析计算,得到双腿站立时,不同并联被动式弹簧机构组合作用下髋关节的应力及形变云图,如表1所示。

表1 双腿静止站姿下不同被动式弹簧机构组合作用下髋关节应力形变云图
由表1中的云图可以看出在AE型并联被动式弹簧机构组合作用下,髋关节周围骨组织所受的应力形变最小。双腿静止站姿下髋关节应力形变主要集中于骶骼关节附近,根据FFP分型可知骶骼关节处是最容易发生骨折的位置[21],设计下肢助力外骨骼时,除了要尽可能根据仿生学原理,添加与人体真实的肌肉韧带分布相近的被动式弹簧外,也要注意加强骶骼关节处零件强度,保护穿戴者安全,降低发生骨折的风险。为定量分析骶骼关节处的应力形变情况,量化不同被动式弹簧机构组合对骶骼关节易骨折部位应力应变的影响,在骶骼关节处选取容易发生应力集中的四个点P1~P4,如图4所示。测量被动式弹簧机构组合作用下四个位置的应力值和形变量如表2所示。根据表2绘制出双腿静止站姿下骶骼关节处应力形变曲线如图5所示。

图5 双腿静止站姿下骶骼关节处应力形变曲线
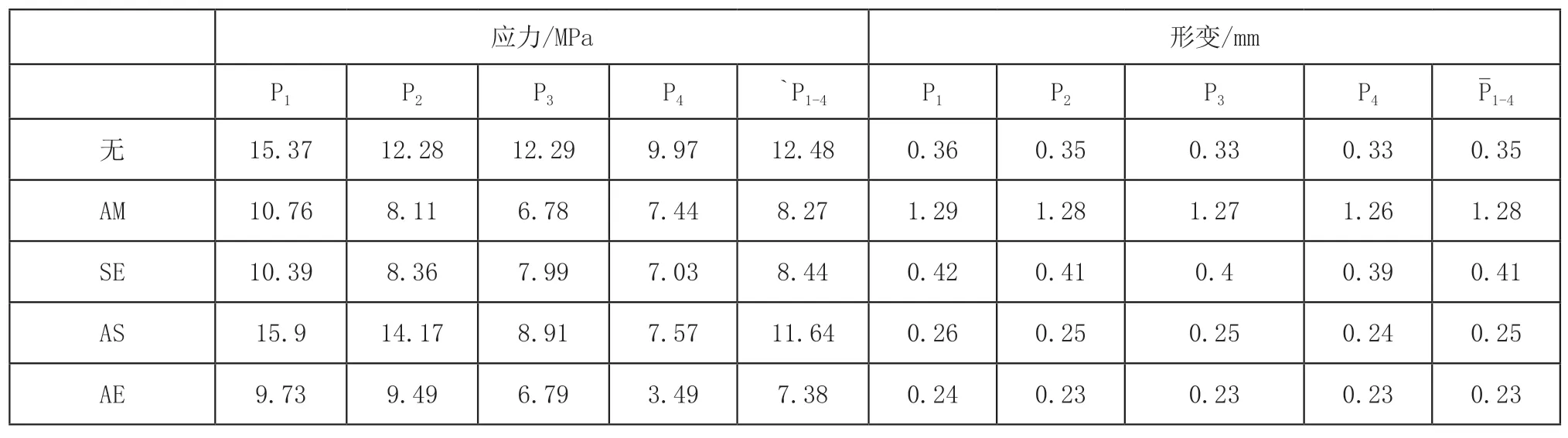
表2 双腿静止站姿下不同被动式弹簧机构组合作用下髋关节应力形变表
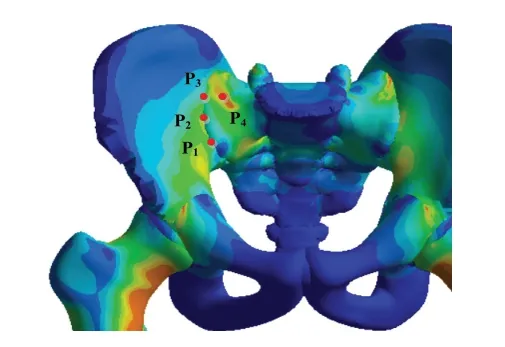
图4 骶骼关节处选点示意图
观察云图及曲线图分析可知,添加被动式弹簧机构可以显著降低髋关节易骨折部位的应力;其中在AE型并联被动式弹簧机构组合作用下,耻骨与髋臼连接处平均应力值由12.48MPa减少到7.38MPa,应力降低41%;骶骨及骼骨处形变量的变化不大,主要降低的是股骨处的形变量,降低股骨骨折的风险。
3.3 单腿站立时不同并联被动式弹簧机构组合作用下髋关节的应力及形变分析
单腿站立时,并联被动式弹簧机构组合情况与双腿站立完全一致,此时只分析不同被动式弹簧机构组合作用下单侧髋关节组合作用下髋关节及其周围骨组织的应力及形变云图,仿真计算结果如表3所示。
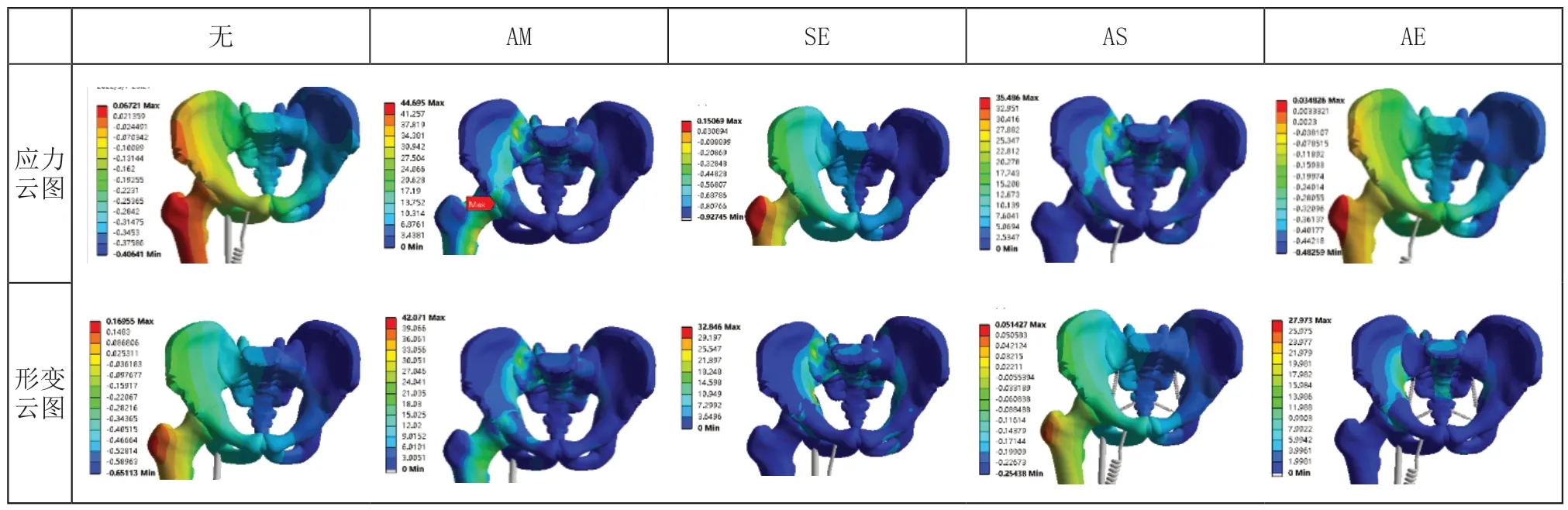
表3 单腿静止站姿下不同被动式弹簧机构组合作用下髋关节应力形变云图
由表3可知,单腿静止站姿下髋关节周围骨组织的应力形变峰值位于髋臼上缘处,添加被动式弹簧机构可以显著降低该处的应力集中及形变量。其中AE型并联被动式弹簧机构组合作用下,髋关节及其周围骨组织的应变及形变量最小。为了定量分析髋关节及髋臼上缘处易发生骨折位置的应力及形变,在髋臼切迹处选取容易发生应力集中的四个点P5~P8,如图6所示。测量四个位置的应力值和形变量,并计算四点应力形变平均值-P5-8,如表4所示。根据表4中数据绘制出单腿静止站姿下髋臼节处应力形变曲线如图7所示。
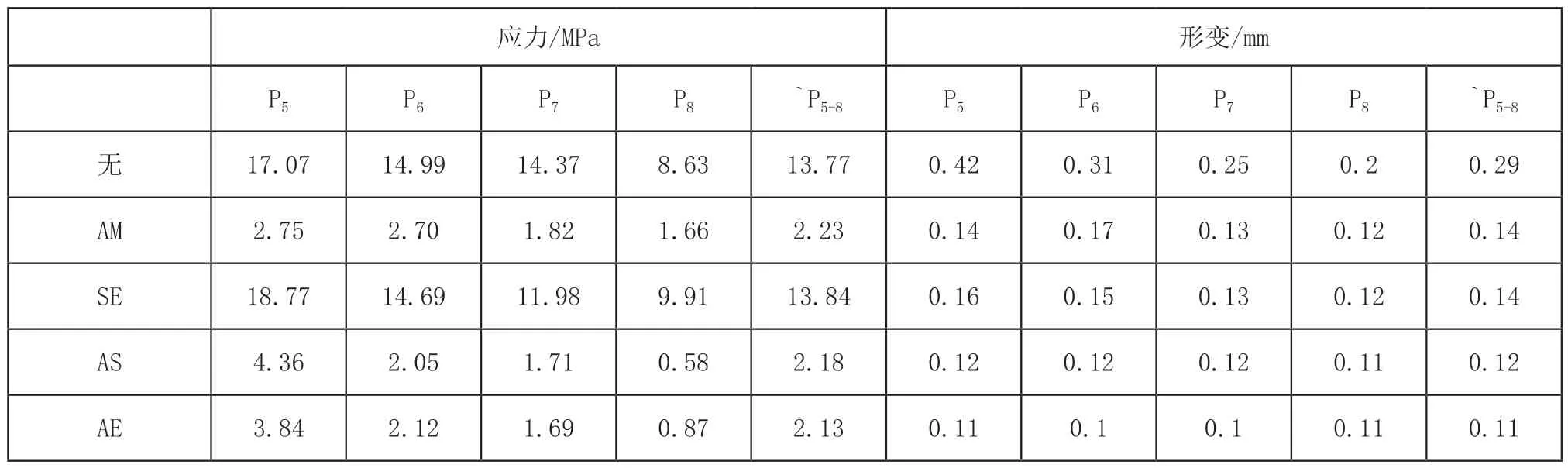
表4 单腿静止站姿下不同被动式弹簧机构组合作用下髋关节应力形变表

图6 髋臼处选点示意图

图7 单腿静止站姿下髋臼关节处应力形变曲线
与未添加被动式弹簧机构相比,添加被动式弹簧机构后髋关节周围的股骨头、股骨颈、耻骨支以及髋臼上缘等骨组织的应力均明显降低。其中AE型并联被动式弹簧机构组合作用下,髋臼附近应力值最小,平均应力值由不添加任何被动式弹簧机构的13.77MPa减小到2.13MPa,应力降低85%;同时,在AE型并联被动式弹簧机构组合作用下,髋臼关节的形变量也显著降低,平均形变量由不添加任何被动式弹簧机构时的0.29mm降低到0.11mm,形变降低62%,极大降低该区域发生骨折的风险。与双腿站立相比,单腿站立所承受的力更大,导致应力及形变量最大值出现的位置发生变化,此时被动式弹簧机构的添加对于降低易骨折部位的应力集中及形变量的效果更为明显。
4 结语
基于生物力学建立了具有并联被动式弹簧机构的下肢骨骼有限元模型,分析双腿站立及单腿站立两种姿态下,不同种并联被动式弹簧机构组合作用下髋关节的受力及形变情况。仿真实验结果表明,双腿静止站姿下,髋关节所受应力主要集中在骶骼关节附近、髂前后上棘及耻骨与髋臼连接处;单腿静止站姿下,髋关节应力主要集中在髋臼上缘处。合理添加并联被动式弹簧机构使得髋关节周围骨组织受力情况更加均匀,显著减小髋关节周围骨组织的应力及形变量,降低盆骨、股骨及其他易发生应力集中及较大形变量的骨组织骨折的风险。
因此,在后续下肢助力外骨骼机械结构设计过程中,需要提高骶骼关节和髋臼处零部件强度,参考本文设计的AE型并联被动式弹簧机构组合的刚度值和位置,进行下肢助力外骨骼的结构设计和优化,保证下肢助力外骨骼可以达到减轻穿戴者负担、提升助力性能、增强穿戴者舒适性的效果。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
老年医学研究(2021年5期)2022-01-19
火力与指挥控制(2021年6期)2021-08-06
小哥白尼(野生动物)(2021年12期)2021-03-29
建材发展导向(2021年24期)2021-02-12
西南交通大学学报(2018年6期)2018-12-18
知识经济·中国直销(2018年6期)2018-06-29
江西建材(2018年2期)2018-04-14
发明与创新·大科技(2017年7期)2017-07-17
制冷技术(2016年4期)2016-08-21