
焊接机器人的发展及相关技术分析
2022-12-08 10:01刘登华
今日自动化 2022年9期
刘登华
(深圳安纳赫科技有限公司,广东深圳 518000)
1 应用焊接机器人的重要意义
焊接机器人是随着工业水平而发明出来的,它在焊接产品中的运用有着重大的意义:①极大地提升了焊接产品的品质,因为焊接产品的焊接压力、电流、焊接转速等参数和人工操作因素对焊接产品的品质起着决定性的影响,因此焊接机器人的使用更高效地的减少了人为因素对焊接品质所产生的影响,并可以更好地调节焊接的压力、电流、转速等,使之保持统一性,进而提升焊接的品质。②极大提高了效率,因为机器人焊接的反应速度比人工焊接更快,且它还能够在24h 内不停地连续性进行,从而极大地提高了生产焊接产品的效率。③改变了工人劳动条件,因为人工焊接时必须面临着严酷的焊接环境,会对焊接工作者的身体健康产生危害,而焊接机器人的应用可以使得工作人员不需要再进行对工件的搬运,从而改善了工作人员的劳动环境,且可以减少了高强度体力劳动。另外焊接机器人的使用也合理地减少了工业生产的制造周期,从而促使制造业产品进一步更新换代。
2 焊接机器人的发展现状
2.1 焊接机器人在生产线上的发展现状
对于车辆制造焊接工业来说,在车辆焊接加工制造的流程中,一般净化器的最前端主要用来连接发动机涡轮增压器和车辆排气装置。在汽车设备的加工制造流程中,汽车焊接生产线大致包括了以下关键焊接过程,主要涉及半壳体的焊接、进气法兰的焊接、焊接装配、焊接泄漏测试、装配尺寸测试,以及补焊处理。可以看出,在实际焊接流程中,生产线上的焊接与质量检验工作过程往往是同步进行的。在这个工作中,两边的焊接工作主要由机器人进行作业,而随后的质检与包装等工作则必须由相关检验部门工作人员进行。
2.2 焊接机器人目前的缺陷
在焊接产品的加工过程中,通过净化器前端的检测过程,发现也有不少问题。例如会有部分作业人员,岗位分布出现困难,不能有效应用检测机器人的运行效率。由于焊接机器人制造的产品不能进行检测与封装,大量成品不能进行封装,会对整体企业的制造质量造成影响。另外,在制造流程中,由于制造节拍不对应,将直接造成焊接机器人暂停运行,直接影响整个产品的正常安全运行。另外,由于焊接机器人采用的检测技术参数产生偏差,检测作业效率很低。
3 焊接机器人的应用分析
通过对焊接机器人工作流程的分析可以看出,生产线控制问题较为明显。对这一问题的分析主要表现在目前生产中使用的焊接机器人,整体智能控制程度不足,从而无法完全实现焊接加工过程中的自动检测工作。另外,机器人在运行过程中并没有柔性控制思想,因此不能达到对现场生产的需要以及对现场生产状态的针对性评估。随着焊接机器人的生产工作理论与技术的优化与发展,从而对现行的工程机器人生产作业过程进行改善:①PFMEA 模式。该理论属于失效模型,分析后的结论能够有效提高焊接机器人在实际工作流程中,对焊接工作中的问题和错误动作加以预测和分析。例如,在汽车尾气净化器产品的焊接流程中,通过确定产品在前端工序中产生的故障影响等级,就能够进一步减轻因后期人工检验工作而产生的工作压力,从而提升产品的制造效率。②过程能力分析。该分析主要面向于焊接机器人,通过对生产线中各个岗位的效率问题进行综合分析研究,由此能够合理分析工艺能力,从而高效解决在生产线焊接过程中出现的各类问题,保证每件产品的加工时间间隔满足正常的生产率要求。同时需要逐步优化人员的工作方法,以确保人员能够和焊接机器人的工作速度形成对应,避免生产中大量积压材料等问题,从而提升生产效率。
4 焊接机器人相关技术分析
4.1 机器人传感器技术
通过应用该技术,感应器装置可以重点用来提升机械化生产的工作效率,以及合理调节工作距离和工作时限。例如关于光电换能器装置的应用,主要是为了在生产线焊接管理工作中焊接机器人对加工岗位的高效感知,从而能够有效地降低因焊接机器人位置偏差所造成的产品质量问题。又例如在焊接机器人的焊接过程中,就必须正确设定好适当的焊接工作夹具,可以通过焊接机器人了解具体的焊接情况和焊接内容,进而可以合理确定焊接工作的顺利进行。不过在实际的管理工作中,夹具往往会松动,使得位置工作产生相应的偏差,这也将影响焊接机器人的焊接精度。所以,应用机器人传感器技术,将能够有效地改善焊接作业的整体品质与稳定性。图1为传感器技术下的光电信息输入电路。

图1 传感器技术下的光电信息输入电路
4.2 PLC控制系统
该技术重点在于焊接机器人对各设备生产线的所有设备进行集中式监控与离散监控,以充分保证各设备在工作中都得以进行迅速反应。而一旦焊接机器人发生了故障,PLC 控制器也得以迅速反应,从而合理调节整个工厂的所有设备工作状况,有效防止因错误加工导致的物料浪费。
4.3 智能信息技术
在整个焊接生产线的正常工作流程中,借助智能信息技术的合理运用,就能够对整体焊接生产实施科学管理。通过可编程控制器的系统,能够有效收集焊接机器人在工作流程中的所有运行数据信息。并且,在智能信息系统中,还能够对这些信息加以管理与使用,因此能够合理计算流水线的生产节拍,同时根据各岗位生产情况提供适当的工作报表,为生产线的工位调度提供必要的数据支持。
4.4 柔性生产技术
柔性生产技术,能够保证机器人的焊接工作更为智能与敏捷。也因此,通过采用快换衬砌台车装置,能够更高效完成装夹的速度转换,从而减少人工干涉对整个制造效率产生的不良影响。
4.5 仿真模拟技术
使用焊接机器人在完成有关焊接工作时,当使用比较先进的信息技术时,必须通过对枪机轨迹仿真方式查找到比较精确的焊接初始点。通过使用这一技术手段,机器人可以在实际工作过程中具有相当好的智能特性,从而可以更加精确地把障碍物和焊接物辨识开来,这样在实际焊接工作中也就具有相当高的效率。针对焊接工作的具体内容而言,最关键的就是所采用的技术必须突破原本的核心要点,促使整个相关工作在不断进行过程中都可以具有比较好的效果,从而使得看起来十分复杂的工作才能更加顺畅进行,以便于优质、高效地进行焊接工作,从而促进焊接产业的未来蓬勃发展。所以,仿真模拟技术在焊接机器人中是十分关键的,通过发挥这项技术,可以充分发挥焊接机器人自身的功能。
4.6 焊接识别技术
焊接机器人在开始实施相关任务之前,必须先对焊接的目标、形状和结构等方面加以分析,才能正确找到和确定焊接所处的部位,如此便能够有效提升焊接技术本身的质量。如果为了使机器人在工作上拥有更高的品质,就需要在焊接机器人实际工作时查找到的所有焊点,从而使其在后续工作中更加精确地计算路径,从而使得焊接的工作得到良好进行。根据目前状况分析,国内所采用的焊接机器人技术还是无法完成对焊接的精确定位,还是工作人员使用肉眼对焊接进行观测,如此则造成很多焊接无法在焊接过程中保持完整性,造成焊接工作本身质量并不高,这便无法提高焊接机器人在焊接寻找上的精确度。从中可以看得出,焊接识别技术在未来尚有很长的路需要走,因此有关研发部门需要进一步加大在此方向上的研发,从而使得焊接识别技术可以在焊接机器人上充分发挥自己的功能。图2为焊接机器人高速识别焊接技术流程。
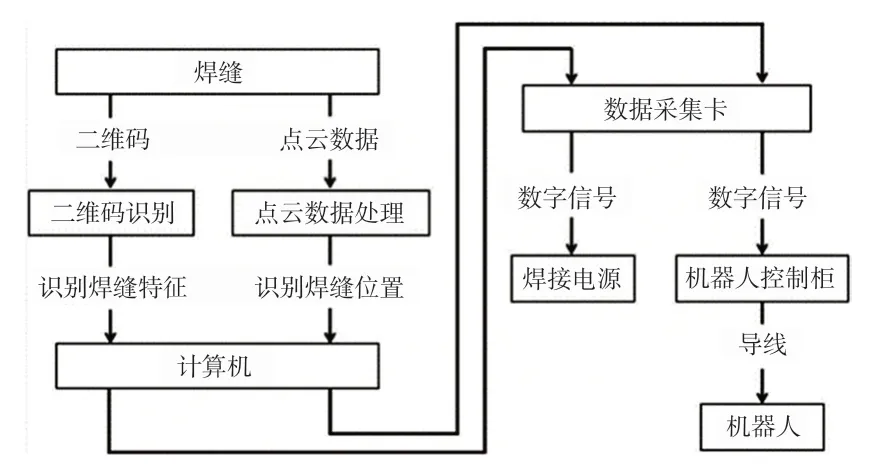
图2 焊接机器人高速识别焊接技术流程
4.7 专用弧焊电源
焊接机器人核心技术的研发、控制、系统设计以及机器人本身的研发,还必须对机器人所使用的弧焊电源进行更全面的深入研究。近年来,对弧焊电源的研发由常规的开关电源到采用嵌入式单片机的晶体管型弧焊电源,再发展到具有专家制度的焊接开关式供电(MIG/MAG),对弧焊电源也开始进行迅速地改进。现阶段,对弧焊电源主要是向着电子化方面开发,是将连接中焊机的工作信号以数码的形态表现起来,可以保持焊接参数的稳定性,减少对外界的影响,同时也更容易调整,从而极大提高了焊接加工的质量品质。
5 优化焊接机器人工作的策略
5.1 选择专业水平较高的员工
当下,焊接机器人在生产线上的使用还存在着一定问题,因此必须对机器人装置加以合理调配,并全面进行对各种生产工件的品质检测检验。因为生产线中的质量检测工作都必须由专门工作人员完成,所以想要提高焊接机器人的工作效率与品质,就需要匹配更多的专门操作人才,这样不但能够充分适应生产线中生产加工工人的需要,还能够完成对焊接机器人更系统、更有针对性的维修工作,从而使生产线中各项生产工作顺利进行。
5.2 焊接机器人设备的合理选择
焊接机器人系统是由运行系统中的多种不同型号的机器人构成。这些技术设备从他们的运行特点和技术参数到设计要求,都会直接影响整条生产线的生产效果和产品质量。所以,企业必须严格按照生产线和现场生产人员的工作特点,正确选用焊接机器人装备,以便合理地选择各种夹具和小部件满足生产的设计和检测需要,以防止设备对整个生产的制造品质和效果造成不良影响。
6 结束语
我国正在全面推行资源节约型、生态节约型社会的发展模式。所以,在中国工业机械制造工艺中,有必要适当运用一些比较完善的智能控制,从而高效实现生产的经济性与效益。焊接机器人的应用对于促进工业生产具有重要的作用,焊接机器人技术发展至今已逐步完善,但是新技术的应用、开发以及机器人智能化控制等方面还需要进一步加深,以更好地发挥焊接机器人的优势。
猜你喜欢
今日农业(2021年13期)2021-11-26
今日农业(2021年10期)2021-07-28
锻压装备与制造技术(2021年2期)2021-07-19
劳动保护(2018年5期)2018-06-05
现代企业文化(2016年1期)2016-12-23
国际医学放射学杂志(2016年4期)2016-08-22
办公自动化(2016年18期)2016-08-20
焊接(2015年8期)2015-07-18
焊接(2015年8期)2015-07-18
有色金属设计(2015年2期)2015-02-28
