膝关节智能康复机器人机构设计及分析
2022-12-06 04:06赵艳芳李鹏曹晓田
科学与信息化 2022年22期
赵艳芳 李鹏 曹晓田
江苏理工学院 机械工程学院 江苏 常州 213001
引言
随着人口老龄化和运动产生的损伤,膝关节损伤的比例逐年增大,膝关节康复受到越来越多的关注。同时随着机器人技术和康复医学理论的发展,康复机器人成为研究的热点。与此同时,可穿戴式[1]的康复市场规模逐年虽在不断扩大,但针对专业性的器材仍有短缺。高度集成和低功耗并不是医疗可穿戴设备的唯一挑战。无论是机构还是个人,都对器械的安全性要求很高。医疗可穿戴设备如何创新,了解真正的病理,满足患者舒适性、病情参数监测的要求,让患者更健康等需求也是需要行业内不断思考的问题。
目前国内外单关节康复辅助设备相对较少,开发自己的医疗器械、形成自主知识产权并形成产品投入使用具有相当大的战略意义。根据部分家庭会因各种因素而难以在康复机构康复,此器械为在家自主进行康复训练的一款机器,并针对因运动不当、意外事故、关节硬化等膝关节损伤群体进行研究设计[2],以人体膝关节结构为分析对象的膝关节智能康复机器人。以左腿为例,初期根据设计理念,通过辅导老师指导设计一款自由度为1,以液压驱动为工作原理的一款器械。但在后期讨论中,发现其占地面积和洁净程度达不到我们预想,因而重新选择传动方案。为了实现膝关节的屈伸运动,我们先后设计了3种驱动机构:液压驱动机构、凸轮驱动机构、舵机驱动机构。最终结合运动特点得出舵机驱动机构是最合理的驱动机构。此器械同时借鉴了健身器材大腿伸展训练器,设计出U形杆组,使得受力点在脚踝处,避免产生术后韧带重建的二次损伤[3-4]的切应力。进一步,为了增加舒适性,在U形杆组的内侧改为弧面接触,增大受力面积。
为了适用更广泛人群,查阅国家标准GB 10000—1988的中国成年人人体尺寸,又鉴于人体尺寸差异,为了满足大多数人训练的需求,大腿长度a∈[438,523],小腿长度b∈[344,419](a、b单位为毫米),和人体腿围的差异性这三方面考虑。最终确定圆周分布孔的调节范围在-15°~+15°(向上为+,向下为-),采用三角形稳定性,选择三枚螺栓固定,每一次调节角度最小误差为3.75°;长度调节板最小调节误差为12.1毫米。经过实验仿真发现,人体实际尺寸与理论尺寸不能一一对应,故在椅子上表面加入气囊,以弥补上述情况可能带来的不适性。为了确保角度调节板和长度调节板可使舵机轴护具转轴与膝关节在同一直线上,通过调节屈伸杆的长度和手动给脚踏板气囊充放气可以使脚与脚踏板气囊更好贴合。
为了确保安全,在椅子扶手旁装有急停按钮。急停按钮与强电盒为电性连接,电盒中装有空气开关,紧急时手动或通过手机App触屏控制实现制动,从而关闭器械上所有线路保证用电安全。进一步,考虑到患者体位姿势的正确性,在长度调节板上安装红外探测报警器,限位弹簧以及束腹带与椅座靠背连接,在视觉和触觉上提醒患者在康复期间因疼痛使膝盖前后移动的最大位置。
控制机构在App上实时调控模式、速度、角度与“急停”。模式即为自动与手动两种。虽然近年来,随着机器人、生物工程及控制等技术的发展,康复训练机器人已经成为多学科融合的热门研究领域,被广泛应用到临床上[5]。但针对不同的运动系统功能障碍患者,采取不同的康复训练机器人可以达到更加有效的康复效果[6]。与国外相比,由于我国现代医用机械技术和康复医学知识正处于兴起阶段,发展水平相对落后水平。因此从事该方面的研究有着重要的理论价值。本文设计了一款从患者角度出发的屈伸装置,该装置在结构上可以避免一些有害力造成的二次损伤,并且在功能上达到可控、智能化及操作界面可视化的效果。
1 机构设计
结构总体含有四个模块,分别为支撑机构、支具机构、运动机构、控制机构。
能够满足膝关节康复运动的需要,这是膝关节智能康复机器人机构设计的最基本要求。即要求膝关节康复机能按照设计要求完成指定的运动,包括运动的角度、速度以及运动中心的平面位置,而且能够适合不同身高的患者,并能根据患者小腿长度进行相应的调整,以及对结构进行优化设计,安全上设计一些硬性保护措施。
1.1 支撑机构
支撑机构在康复训练中为患者提供支撑、安全保护和贴合肢体的作用,主要由升降椅(1)、扶手(2)、束缚带(3)、大腿气囊(4)、急停按钮(5)等部件组成。如图1所示。
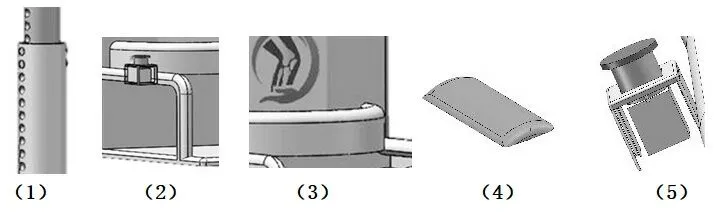
图1 膝关节康复器械支撑机构组成
患者可通过调节椅子升降杆的高度和气囊的充气程度使腿部与机构更加贴合。急停按钮与扶手连接,又与强电盒为电性连接,电盒中装有空气开关,紧急时可通过手动或通过手机App触屏控制实现制动,从而关闭器械上所有线路保证用电安全。
1.2 支具机构
支具机构是由绑带、铰链、衬垫、支架组成。其中绑带衬垫与肢体接触,绑带、衬垫采用尼龙制成;绑带上具有粘条,可根据不同患者的腿围调节。铰链可以进行档外的角度调节,当确定某一角度时可采用卡扣将其卡死,且所有材料均符合运动时的强度要求。其次,支具上设有理疗仪,冷/热疗能够消肿止痛、通络舒筋、活血化瘀,促进膝关节周围血液循环,还具有轻微的麻醉效果,缓解其膝关节疼痛。
1.3 运动机构
本器械具体运动机构组成包括活动板1(与扶手处连接)(1)、活动板2(外伸端)(1)、Arduino控制板(2)、屈伸杆(2)、舵机(1)、强电盒、限位弹簧(3)、红外探测报警器(3)、脚踏板气囊(5)、压力传感器。
首先,在工作过程中设有最大屈伸角度范围(0º~130º),保证器械本身不会运动到极端角度对患者造成危害,保证安全性。
其次,活动板1与活动板2之间具有周向角度与轴向的长度调节,周向的角度调节误差控制在0°~3.75°之间,轴向长度调节根据不同使用者的大腿长度确定。调节范围在(438,523)之间。
又通过调节活动板1和活动板2可使舵机轴护具转轴与膝关节在同一直线上,调节屈伸杆的长度和手动给脚踏板气囊充放气可以使脚与脚踏板气囊更好贴合。
限位弹簧以及在长度调节板上装有红外探测报警,在视觉和触觉上提醒患者在康复期间因疼痛使膝盖前后移动的最大位置。
第五,对比市场普遍存在的康复仪器CPM关节仪(膝关节术后康复训练运动基于连续被动运动(Continuous passive motion, CPM)理念,SALTER教授首次提出了 CPM 理念,研制了第一代膝关节 术后康复训练机器人,并进行了临床试验研究)。经过患者实际使用情况的反馈,发现可能在损伤膝盖处产生剪切应力,产生不可逆的二次损伤。因此将受力点设计在脚踝处,由此只产生垂直的力,避免剪切分力,脚踝通过U形杆组产生运动。压力传感器安装在U形杆内前侧,即与脚踝接触位置,可以精确的感应脚踝处的受力并且在App界面上显示。
1.4 控制机构
控制机构是器械实现各功能的核心,实现方式是Arduino控制板中的编码程序与智能手机的蓝牙连接实现通讯。其安全高效,操作简单,成本低廉,制作方便,能够满足患者对康复训练的需求。
首先,在App上实时调控模式、速度、角度与“急停”。模式即为自动与手动。手动模式(1)中,速度有3个挡位按钮(均可根据不同情况改变数值大小);由于膝盖康复过程中屈膝角度进程呈阶段性,因此设有三个角度调节按钮,前两种角度数值可调,小角度不可调(为1º),避免韧带大角度连续拉伸,造成韧带不可逆的松弛。
第二,自动模式(2)中,运动角度范围、运动次数及运动速度均可调、可视;并且压力用动态图实时显示数值。
2 运动学分析
2.1 膝关节结构和屈伸角度
膝关节(1)是人体最大、最复杂的关节,属于屈戍关节。由股骨下端、胫骨上端和髌骨构成。髌骨与股骨的髌面相接,股骨的内、外侧髁分别与胫骨的内、外侧髁相对。胫骨内外侧髁的上关节面甚浅,它们与股骨关节头的曲面不相适应,但由于半月板的楔形填充,扩大了股骨与胫骨的接触面。膝关节的稳定性有赖于关节囊内外韧带的坚韧性,主要有髌韧带、胫侧副韧带、腓侧副韧带、关节囊后方的腘斜韧带以及关节囊内的前交叉韧带和后交叉韧带,这些韧带对膝关节的稳定性起到至关重要的作用。
小腿与大腿延长线的夹角α为膝关节的屈伸角度(2)。膝关节运动范围能够达到的正常运动范围为0°~130°。膝关节主要有屈伸运动和内外旋转运动,但是由于旋转转动角度较小,因此可将膝关节运动看作只有1个自由度。
2.2 运动轨迹设计
机器运动轨迹为圆周运动(3),采用的方式是舵机运动传送力,脚腕处受到一个垂直于小腿的恒力F。通过受力分析,将(3)训练结构简化为(4),膝关节类比为铰支座,小腿为杆。康复路径为以膝关节为圆心,小腿为半径的圆弧。力F在圆弧的切线上,与小腿始终保持垂直。避免前十字韧带受到剪切力,造成二次伤害。
3 结束语
本篇论文以运动不当、意外事故、关节硬化等膝关节损伤群体作为研究对象,通过对运动学的分析发现了在机构外形设计、3D建模以及功能设置及其转换等问题。根据研究时的是实际情况,本论文提出了一系列的应对措施。首先在确定动力源阶段,基于液压机构造价高、体积大、液压油容易外溢,这与我们轻量化、简洁化的设计理念相悖及凸轮传动机构占用空间大、运动不稳定、加工复杂,本文采用舵机作为动力源,舵机体积小、价格合理、动力大且运动稳定,符合设计成本及需求。其次,由于膝关节损伤患者的伤病程度不一致,且承受的屈伸力度也不尽相同,本器械采用智能编程实现不同挡位的速度与角度,解决了因个体差异带来的又一数值问题。第三,安全性问题上采用急停按钮、弹性限位、红外探测报警器、空气开关、软性束腹带等多重保护。
总的来说,本文阐述了器械设计过程与这一器械较其他设备在某一方面的优势及创新点。如手动与自动模式间的切换、在不损伤膝盖组织的前提下精准实现膝关节屈伸运动、操作简单但实用性高等,具有实际的价值意义。
猜你喜欢
护理与康复(2022年6期)2022-11-25
中老年保健(2021年10期)2021-08-24
临床骨科杂志(2021年4期)2021-08-20
保健医苑(2021年7期)2021-08-13
保健与生活(2021年6期)2021-03-16
家庭百事通·健康一点通(2020年12期)2020-12-31
甘肃教育(2020年18期)2020-10-28
实用骨科杂志(2020年3期)2020-04-10
中国体育教练员(2018年2期)2018-07-23
运动精品(2017年3期)2018-01-31