3D打印导航模板在儿童后天性肘内翻畸形矫形手术中的应用
2022-12-02 09:12王武愉毛永敏张爱国徐大鹏
当代医药论丛 2022年21期
沈 濬,秦 蓉,王武愉,毛永敏,唐 凯,张爱国,徐大鹏
(无锡市儿童医院,江苏 无锡 214000)
儿童肘内翻畸形多为肱骨远端骨折并发症[1],畸形可表现为冠状面内翻、矢状面屈伸和(或)水平面旋转畸形[2]。恢复肘关节正常解剖结构与功能是肘内翻畸形矫形治疗的目标。选取肱骨髁上部位进行截骨是矫正肘内翻畸形的常用方法,如外侧楔形截骨术、倒V 形截骨术、等腰三角形截骨术、双L 形截骨术等。目前已有的文献报道以外侧楔形截骨术多见,总体而言,截骨在实际操作中在很大程度上依赖于骨科医生的专业知识和经验,截骨操作出现定位不准确或截骨固定不当会导致移位畸形、校正过度或不足等[3]。随着数字医学和3D 打印技术的进步,截骨手术术前规划、术中导航模板制作为截骨的精确性提供了巨大帮助[4]。2012 年7 月至2021年7 月收入本院的11 例肘内翻畸形患儿,接受了采用计算机辅助设计和3D 打印导航模板辅助的截骨矫形手术,本文对这11 例患儿的临床资料进行回顾性研究,以探讨3D 导航模板在肘内翻畸形矫形手术中应用的可行性。
1 资料与方法
1.1 一般资料
本组男9 例,女2 例,左侧畸形7 例,右侧畸形4例,年龄5 岁至12 岁,平均7.9 岁,11 例均为肱骨髁上骨折的并发症,肘内翻畸形矫形手术时机在骨折发生后1.5 年至10 年,术前肘内翻角度10°至20°,平均16.36°。所有患儿均无基础性疾病。术前CT 影像由64排螺旋CT(philip,荷兰)采集,数据以DICOM 格式存储。用Mimics17.0 软件进行术前规划和导航模板设计。
1.2 手术方法
1.2.1 术前计算机模拟和导航模板制作 将患儿双上肢的CT 数据(DICOM 格式)导入Mimics21.0 软件,建立肱骨的三维模型,将健侧图像生成镜像,与患侧图像进行比对,并结合入院前X 片测量的提携角差值,确定冠状面截骨平面和角度。以肱骨远端外侧髁为骨性标志,在Mimics21.0 软件中提取肱骨远端外侧表面解剖数据,生成相应的模板,分别设置两枚平行于近端截骨面和远端截骨面的定位管道,生成导航模板。根据患侧肱骨与健侧肱骨镜像比对结果,相应调整定位管道角度以应对矢状面、水平面的合并畸形[5]。布尔运算后修整边缘多余部分,完成导航模板的制作,将导板以STL 格式导出至3D 打印机打印(图1)。
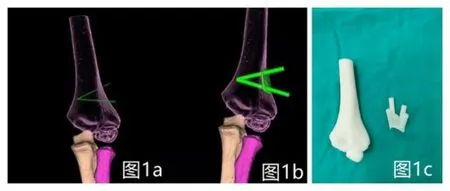
图1 计算机模拟和导航模板外观照
1.2.2 导航模板消毒方法 采用环氧乙烷对导航模 板 进 行 消 毒, 温 度 设 置 为(50±5) ℃, 浓 度300 ~1000mg/L,湿度控制在30%RH 至80%RH 范围内。
1.2.3 导航模板使用 麻醉稳妥后,局部消毒铺巾。取肘外侧切口,依次切开皮肤、皮下组织,在二头肌、三头肌之间切开骨膜,暴露肱骨远端髁间窝上水平,3D 打印模板嵌入肱骨,寻及最嵌合处,四根克氏针自导针方向钻入肱骨,取出模板,克氏针范围内楔形截骨,肱骨内侧柱处相交,截骨角度约30°,纠正肘内翻角度,截骨后肱骨断端外翻闭合后经皮分别从肱骨外髁打入三枚克氏针,固定于截骨近端,活动肘关节,查看术后提携角改变情况。C 臂机透视查看截骨面对位对线情况。稀碘伏冲洗手术切口,缝合骨膜皮下组织。克氏针尾折弯留皮外,功能位石膏固定。见图2。

图2 导航模板使用
2 结果
2.1 导航模板描述
我们设计的导航模板整体呈弧形,包括贴合面、2个上截骨面定位管和2 个下截骨面定位管,同一截骨面的定位管处于同一水平分布,上下截骨面定位管冠状面成角即冠状面外翻截骨角度,在水平面成角即水平旋转角度。根据计算机三维成像结果,设计好不同角度。
2.2 手术结果
11 例患儿均成功设计并制作出导航模板,术前计算机设计时间68 ~120min(平均109min)。导航模板与患儿肱骨远端匹配度良好,从暴露出骨质至截骨面固定牢靠耗时9 ~25min(平均16min),截骨均一次性成功,达到预定截骨角度。
2.3 肘关节术后功能评价
术后定期复查,6 ~8 周复查见截骨线消失则拆除石膏、拔除克氏针行功能锻炼。术前患肢提携角-10°至-20°,术后患肢提携角纠正为3°至15°,平均矫正27°,末次随访时患肢肘关节活动度最大伸直角度为-10°~12°〔平均(2±0.4)°〕,最大屈曲角度为118°~134°〔平均(130.7±2.2)°〕,根据Bellemore 等[6]标准进行评估:优10 例,良1 例,无并发症发生。
3 讨论
儿童肘内翻畸形多见于肱骨远端骨折复位不充分、保守治疗过程中复位丢失、肱骨远端生长紊乱后[7]。本次研究纳入11 例患儿均是肱骨髁上骨折对合欠佳引起。肘内翻畸形造成肘关节生物力线、尺骨鹰嘴及肱三头肌向内侧移位,对尺骨产生长期反复的外旋力矩,造成肘关节外侧副韧带的松弛,远期来看可以导致肘关节外侧旋转的不稳定性[8]。Gurkan 指出肘内翻畸形与尺神经脱位及同侧肩关节后方不稳定存在相关性[9]。
对肱骨髁上部位进行截骨是矫正肘内翻畸形的常用方法,目前已有的截骨方式包括:外侧楔形截骨术[10]、倒V 形截骨术[11]、等腰三角形截骨术[12]、双L 形截骨术[13]、阶梯型截骨术[14]、弧形截骨术[15]等。每种手术方式各有优缺点,例如外侧闭合楔形截骨术由于简单易操作的特点,在临床选用较多,但不能解决外侧髁的突出问题, 而且存在畸形矫正中心点外移的现象[16-17], 若将截骨远端内移则可改善外髁凸起问题,但部分患儿会出现神经损伤[18];阶梯型截骨术、弧形截骨术可解决截骨后外侧髁突出问题,但是操作相对复杂,术中出血多,术中定位难度高,术后并发症多,而且出现神经损伤者多见[1,16,17];等腰三角形截骨术可在三维平面矫正畸形,但手术操作复杂,可能会导致肢体短缩[19]。
理想的截骨术应该是一种三维矫治,包括矫治冠状面的内翻畸形、矢状面的过伸畸形、水平面的内旋畸形。目前对于肘内翻畸形的治疗也倾向于三维矫治,这对术者在精准控制截骨位点和矫正角度要求较高,实际操作中往往需要反复调试,根据大体外观、个人经验进行术中决策。我们遵守相对保守的原则,在外侧楔形截骨术的基础上采用计算机术前规划,设计出3D 导航模板,可在三维平面进行辅助定位和截骨,取得了良好的临床效果。
我们选择外侧楔形截骨术的原因如下:1)术者对此手术入路熟悉,截骨方法熟练,截骨后远端对近端折弯复位时术者和助手配合默契,能较好地处置术中关键操作步骤。2)纳入病例内翻角度介于-10°至-20°,预期采用楔形截骨术后外侧髁突出不明显,外观可以接受。3)针对楔形截骨术的3D 打印导航模板结构简单小巧,可以实现三维矫形。
本研究小组对纳入的11 例肘内翻患儿的影像资料进行了术前计算机模拟,3 例是单纯冠状面畸形,其余8 例合并其他维度畸形,包括过伸畸形和(或)内旋畸形。其他维度畸形较健侧相差均小于5°,Chung M S 和Takagi T 等人,认为肩关节对此畸形角度可以代偿[20-21],我们在设计导航模板时重点是对冠状面畸形进行矫正。我们设计的导航模板整体呈弧形,包括贴合面、2 个上截骨面定位管和2 个下截骨面定位管,同一截骨面的定位管处于同一水平分布,上下截骨面定位管冠状面成角即冠状面外翻截骨角度,在水平面成角即水平旋转角度。
既往我们做外侧楔形截骨术时存在以下风险:定位不够精准,需反复透视,导针角度存在变数。截骨远端骨皮质需存留2mm,做铰链支撑,但是没有导航模板情况下经常截断对侧骨皮质或骨皮质存留过多影响折弯,有时需反复多次截骨,延长手术进程,增加出血量。借助于3D 打印导航模板,贴合面与肱骨远端外侧面匹配度好,贴合紧密,准确定位了截骨平面,截骨、截骨面的吻合1 次就成功,这大大缩短了手术时间,符合手术矫形预期。我们认为3D 打印导航模板优点如下:1)增加确定性,包括截骨平面和角度,预期旋转角度,能实现多维度矫形。2)降低了手术难度,缩短了截骨时间,减少了术中出血量,增加了手术安全性,利于年轻医生开展此类手术。3)减少术中透视次数。
总结经验,我们罗列出导航模板如下缺点和相应对策:1)导航模板缺少术中固定装置,在截骨过程中可能会产生偏移影响精准度[5,22]。我们的导航模板设计简洁,整体贴合满意,设计的定位管道长度大于3.0cm,可避免导针摆动弯曲造成定位偏移,导航模板使用过程中未见偏移。下一步设计导航模板时我们考虑在贴合面设计一稳定孔,增加稳定性。2)非金属材质的导航模板在截骨过程中因电锯摩擦可能发生形变[19,23],克氏针转动过程中磨损模板可增加手术污染机会,产生热量也会破坏管道结构[24]。此类形变及磨损确实是一个现实问题,我们制作模板使用的PLA 材料(复翔科技,中国)克氏针确实会磨损定位孔,为此我们选用较细的克氏针导针,直径较定位管内径小0.3mm。采用低速电钻,转动过程中导针冷水冲浴,降低导针温度,减少污染可能性。3)导航模板增加成本(材料成本、前期时间成本)[4]。包括3D 打印材料、较高精度的3D 打印机、高分辨率的CT 数据[25]、术前模拟耗时[23,26]、医生需要掌握处理成像数据的技术。对于这一缺点,我们认为这是发展性问题,随着科技的进步和发展,成本问题会得到解决。临床上我们应加强术前医患沟通,取得患儿家长认可。
本研究局限性:病例数较少,随访时间较短,无对照试验,相关统计学分析无法开展(结论可靠性降低)。影像学数据来源64 排螺旋CT,对于小年龄患儿,肱骨远端软骨成分较多,CT 不显影,若采用磁共振影像可更好地展示解剖特征。3D 打印导航模板采用PLA 材料,不耐高温,消毒需较长时间,且术中存在碎屑污染的风险。导航模板理论上可以纠正矢状面屈伸畸形、水平面旋转畸形,在我们的研究中体现不深入,主要原因是纳入研究的11 例患儿存在其他维度畸形不明显,考虑到儿童有自我塑形能力和术者手术操作习惯,我们偏保守,后期将开展三维矫形工作。术前计算机规划设计和3D导航模板打印耗费工时,医生需要掌握处理成像数据的技术,导航模板打印增加了患儿的治疗费用,对于这一缺点,我们认为随着科技的进步和发展,病例的积累,该技术成本会显著降低。
综上所述,设计出个性化导航模板有利于手术操作,能简化操作程序,提高术中定位和截骨角度的精确性,减少手术操作时间,是一种切实可行的手术方法。
猜你喜欢
中华实用诊断与治疗杂志(2022年1期)2022-08-31
中华骨与关节外科杂志(2022年1期)2022-08-31
临床骨科杂志(2022年3期)2022-06-23
锦州医科大学报(2022年2期)2022-05-07
现代仪器与医疗(2022年1期)2022-04-19
昆明医科大学学报(2022年2期)2022-03-29
昆明医科大学学报(2022年1期)2022-02-28
腹腔镜外科杂志(2016年11期)2016-06-01
腹腔镜外科杂志(2016年10期)2016-06-01
中国民族民间医药·下半月(2011年4期)2011-09-27