基于机器视觉的聚焦换能器焦点快速定位研究
2022-12-01 11:18郑慧峰董照诚姚润广
计量学报 2022年10期
彭 圆, 郑慧峰, 董照诚, 姚润广
(中国计量大学 计量测试工程学院,浙江 杭州 310018)
1 引 言
目前,声焦域是聚焦换能器的主要研究热点,而焦点是其中极为重要的焦域特征参数之一。对焦点进行快速定位是校准聚焦换能器的重要步骤,通过确定焦点位置进而计算焦距、焦柱长度、焦斑大小等声焦域特征参数[1,2]。由于制作工艺和应用场景不同,聚焦换能器种类繁多且型号各异。随着特征频率升高,焦域面积减小,能量更加集中,对焦点进行准确高效的快速定位较为困难。
目前,聚焦换能器焦点定位测量方法发展最为成熟且应用最多的是水听器扫描法。通过对三维空间中各轴向分别进行一维线扫描,根据最大声压幅值得到焦点位置[3,4]。但该方法效率低且工作量极大。若要实现聚焦换能器焦点的快速定位,由聚焦换能器几何结构分析可知,利用相机成像模型投影后呈圆或椭圆形,焦点近似为椭圆圆心。因此,根据聚焦换能器几何特征可以借助机器视觉自主引导的优势,结合机械臂的灵活定位功能构建合理的焦点定位系统,从而保证定位精度、定位效率和位置可控。
基于机械臂的视觉定位系统具有快速获取有效信息,精度高,检测范围大等优点[5]。系统通过手眼标定统一机械臂与相机的坐标系,利用目标物的点、线或二次曲线等几何特征进行定位。其中,根据图像如何准确检测出换能器的椭圆形状为研究重点。目前,椭圆检测算法包括:基于霍夫变换(Hough transform)[6]及其各类改进算法,基于最小二乘法[7]及其各类改进算法,基于几何特征的算法[8]。霍夫变换算法具有较强鲁棒性,但对有缺失的椭圆及噪声不敏感;最小二乘法等算法检测精度高,但对图像处理要求高,计算量较大,检测效率低;基于几何特征的算法根据椭圆自身几何特征,但容易受噪声等因素影响,计算精度较低。基于边缘连接的椭圆检测算法在处理复杂环境信息和不同形态信息的目标图像时也能够实现快速准确检测并且有稳定的定位精度。根据换能器几何中心即焦点的特征,即可实现聚焦换能器的焦点坐标定位。刘海楠等[18]基于空间傅里叶变换的近场声全息技术,以球面自聚焦换能器为实例,研究了聚焦换能器声场测量方法,验证了测量方法的精度与速率。
本文研究了一种基于机器视觉的聚焦换能器焦点快速定位方法,设计了一套六自由度机械臂和机器视觉结合的机械臂视觉定位系统,能够有效解决焦点快速定位问题,适用于实验室中有一定几何结构聚焦换能器的测量校准。
2 测量系统及原理
研究并搭建了基于机器视觉的聚焦换能器焦点快速定位系统,如图1所示。相机固定于工作面上方,相机光轴与工作面垂直,六自由度机械臂和相机以“眼在手外”的方式构成视觉系统[9]。

图1 测量系统组成图Fig.1 Measurement system composition diagram
系统由3个坐标系组成,分别为机械臂基坐标系{Or}、机械臂末端水听器坐标系{OT}和相机像素坐标系{Op}。通过坐标间的转换关系得到坐标转换矩阵,结合机械臂和机器视觉技术实现聚焦换能器焦点的快速定位。
根据手眼标定建立像素坐标系{Op}与机械臂基坐标系{OT}的转换关系。设像素坐标系{Op}上一点为P(x′,y′),机械臂基坐标系{Or}在固定Z轴高度的XOY平面上一点为B(x,y),两坐标系的变换公式为
(1)
式中:Rx,Ry分别表示x轴和y轴的方向的缩放量;Mx,My分别表示x和y方向的平移量;θ为旋转角度。
最后得到坐标转换矩阵:
(2)
为保证结果的精度,当超过3组数据时,使用如式(3)的最小二乘法进行最佳函数匹配[10]。
(3)
式中:Px,Py为像素坐标;Bx,By为机械臂坐标;i表示第i组数据。
坐标转换矩阵H可以分解为旋转矩阵R和平移矩阵M。
(4)
(5)
根据机器视觉技术可得换能器几何中心像素坐标(x′,y′),根据式(6)最终求得机械臂基坐标系坐标(x,y)。
(6)
机械臂末端水听器坐标系{OT}相对于机械臂基坐标系{Or}的位姿变换关系可通过D-H参数法计算齐次变换矩阵T得到。设曲率半径为r,机械臂末端到换能器表面Z轴坐标为z。最终得到机械臂基坐标系下焦点坐标为(x,y,r+z),通过式(7)求得机械臂各关节位置。
φ=[φ1,φ2,…,φ6]=IKP(T)
(7)
式中:φ1~φ6表示机械臂6个关节位置,IKP(T)表示机械臂逆运动学函数。
3 换能器几何中心像素坐标定位算法
利用基于边缘连接的快速椭圆检测[11]的机器视觉技术检测聚焦换能器边缘轮廓,根据换能器轮廓可得换能器中心的像素坐标。
基于边缘连接的快速椭圆检测核心思想是从换能器轮廓边缘提取椭圆弧段,构造弧邻接矩阵搜索所有可能弧段的组合,并对其进行快速拟合与验证得到候选椭圆,最后使用聚类方法去除重复椭圆。
3.1 弧段提取
输入换能器图片进行高斯模糊滤波,采用Canny算法检测边缘。将检测的边缘轮廓用非参数Douglas-Poiker方法[12~14]逼近为多组线段,即DP轮廓线,DP轮廓线vk表示为{Ak|k=1,2,…,Nd},vk=Ak-Ak-1。θi是从vk到vk-1的成对DP轮廓线夹角,表示为{θi|i=2,…,Nd-1,θi∈(-π ,π )}。所有DP轮廓线弧序列必须满足sign(θi)=sign(θi+1)。
利用基于曲率和凸度的方式提取弧段[15],凸度s=sign(vk+1×vk),提取区域用R(s θarc)·vk表示,其中θarc为曲率阈值,即|θi|<θarc, R(θ)定义如下:

(8)
根据式(9)判断下1个点Ak+1是否与点Ak和点Ak-1在同一弧段上。
vk+1=tvk+pR(s θarc)·vk
(9)
其中,t,p可用式(10)求得,
(10)
式中:两段DP轮廓线比值η=vi+1/vi,其阈值为λarc。
图2为弧段提取示意图,以从DP轮廓线中在A1到A5和A5到A9提取2条椭圆弧为例,图中蓝色和绿色提取区域表示t>0, p>0, 1/λarc<|η|<λarc。
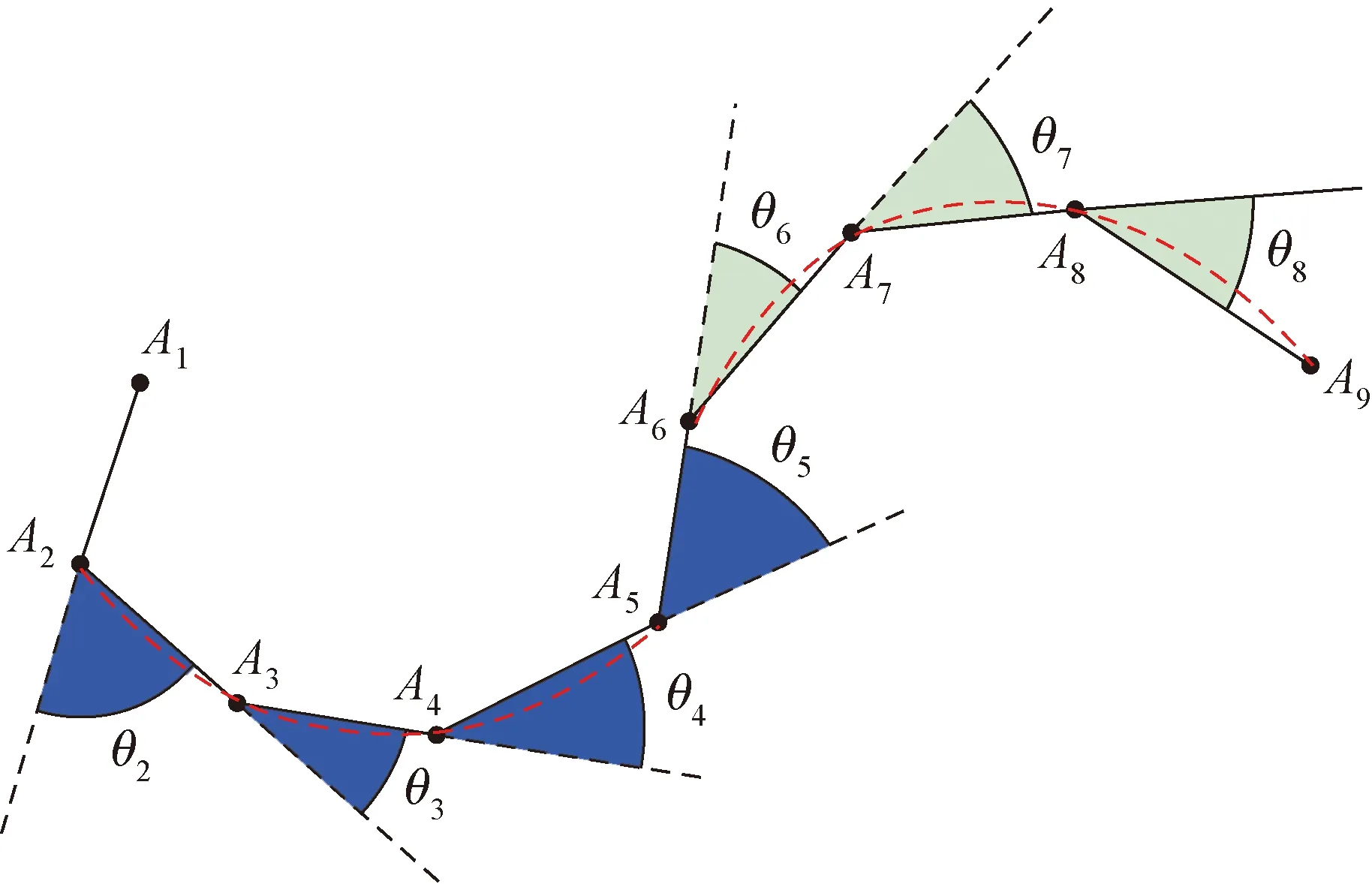
图2 弧段提取示意图Fig.2 Schematic diagram of arc extraction
3.2 构造弧邻接矩阵
弧邻接矩阵(arc adjacency matrix,AAM)采用区域约束和曲率约束来判断1对弧段的邻接情况[15]。
3.3 基于AAM的候选项组合搜索
利用双向组合搜索策略对基于AAM生成所有可能的弧段组合进行搜索。定义集合Iτ-={n0,n1,n2,…,np},Iτ+={m0,m1,m2,…,mq},τ=m0=n0。集合Iτ±=Iτ-∪Iτ+为一个椭圆弧组合,每个元素为弧段角标。根据式(11),判断一个椭圆弧组合的性质。
(11)
若搜索后的集合Iτ-,Iτ+满足式(11),则Iτ±构成1组候选弧段。在搜索过程中,若∃k,g∈Iτ±满足Lk,g=0,意味着2个弧段不邻接,紧接着验证两弧段是否属于同1个椭圆,若的确不属于同1个椭圆,则Lk,g=Lg,k=-1。遍历所有弧段则得到所有候选组合。
3.4 椭圆拟合
候选组合确定后,使用文献[15]中的Prasad和Leung的方法进行椭圆拟合,一般椭圆表达式如下:
Ax2+Bxy+Cy2+Ey+F=0
(12)
椭圆的拟合问题可以转换为
Sα=μCα
(13)
式(13)中S为一个6×6的实对称矩阵,可分解为QTΛQ,Q是特征向量构成的正交矩阵,Λ为特征值构成的对角矩阵,μ为常数。C为一个6×6的约束矩阵,α为待求解向量,α=[α1,…,α6]T,使用文献[16]中的ElliFit椭圆拟合方法约束α3=1,即C中元素C3,3=1,其余元素为0。设β=Λ1/2Qα,拟合问题转变为
(14)
式中:β*为M最大特征值对应的特征向量。
最终求解结果为α*=QTΛ-1/2β*。
3.5 椭圆验证
椭圆拟合完成后,为防止出现假椭圆,需要对其进行验证。取一组采样点Vi(i=1,2…Nv)和4个指标用于验证。4个指标为形状指标SI、位置指标LI、梯度指标GI和加权指标WI。设一个拟合椭圆为E,令OE为椭圆中心点,θE为旋转角,ωE、hE为对应的半长轴和半短轴长度,R(θE)为对应的旋转矩阵,θVi为采样点对应的采样角度,4个指标取值如下:
(1)形状指标。用于约束椭圆形状,最终拟合公式如下:
(15)
(2)位置指标。如果第i个采样点Vi落在边缘点的8个邻域点上,则满足位置指标。对应指标值LIi=1,否则LIi=0。
(3)梯度指标。梯度指标主要用于验证当前采样点估计梯度li[17]和理论梯度gi的相似度,gi计算如式(16)。设θ
gi=[-ωEsinθVi,hEcosθVi]R(θE)
(16)
(17)
(4)加权指标。椭圆采样从极坐标出发,在角度轴均匀采样,导致采样点分布不均匀,呈长轴两端点多,短轴两端点少的情况。为提高验证精度,对每个采样点使用加权指标进行加权。斜率gθ=[-Rsinθ,rcosθ]·R(θE), 其中,R=hE,r=ωE,θ表示θVi。

图3 梯度指标说明图Fig.3 The illustration of the gradient index
取gθ变化率为权值,令WIi=W(θVi),最终得出W(θ):
(18)
采样点数由下式计算得出:
(19)
最后综合得分Pscore:
(20)
式中:SIi,LIi,GIi,WIi为第i个采样点的指标值。
如果Pscore>Tval,则认为该拟合椭圆为真椭圆,相反,则会被认定为虚假椭圆。Tval是椭圆验证的阈值,Tval∈[0.5,1],Tval值越高表明椭圆拟合效果越显著。最后输出真椭圆的椭圆中心点OE的像素坐标值为聚焦换能器的几何中心像素坐标值。
4 实验及结果分析
本文对曲率半径为120 mm高强度聚焦换能器焦点进行定位实验。采用MFC、HALCON和OpenCV混合编程进行手眼标定和基于边缘连接的快速椭圆检测。
手眼标定完成后将水箱放至工作面,换能器竖直放置于水箱中,机械臂末端固连水听器并平行于换能器声轴,信号发生器发射频率为1.2 MHz,幅值为700 mV的20个整周期正弦脉冲信号激励聚焦换能器,水听器接收到声压信号后通过数字示波器进行波形捕捉和数据采集。
如图4所示,最后得到聚焦换能器几何中心像素坐标为(416.79, 353.41) ,根据式(6)得到机械臂基坐标系焦点坐标。进行多次重复定位实验得到坐标平均值为(-582.60, -98.96), mm。结合换能器曲率半径,焦点三维坐标为(-582.60, -98.96, 216.5), mm。
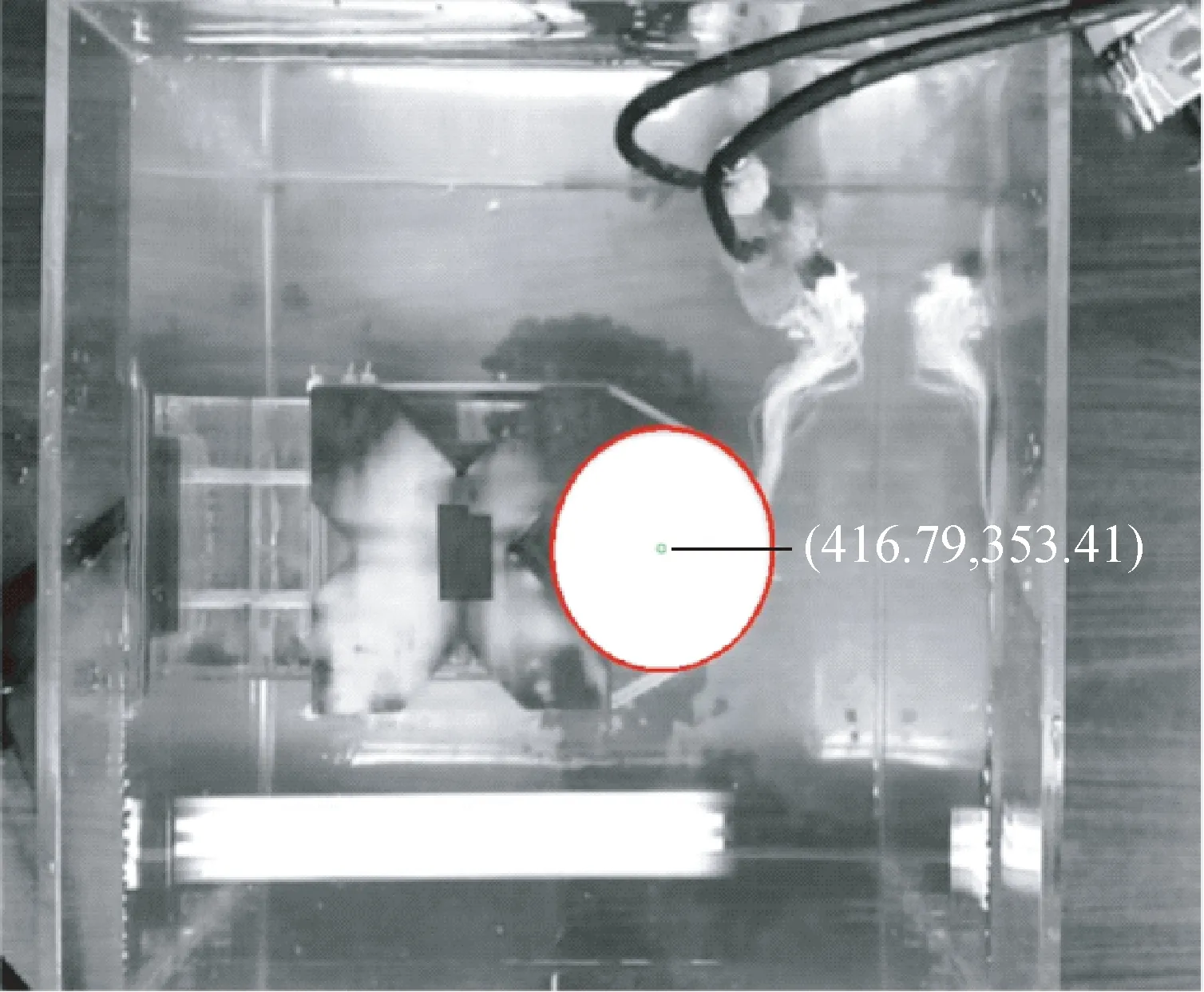
图4 焦点像素坐标Fig.4 Focal pixel coordinates
为验证结果的准确性,对z=216.5 mm的焦平面进行二维声场扫描得到焦平面声场分布。
焦平面声压归一化图如图5所示,由焦平面声压归一化图可知该换能器聚焦效果良好。归一化分贝如图6所示,图中蓝线交点为二维焦点坐标(-582.3,-99.4),mm;黄线交点为基于机器视觉技术定位的焦点二维坐标(-582.60, -98.96),mm。声压-3 dB范围为焦点直径,其直径约为 2 mm,可计算出X轴定位误差为0.3 mm,Y轴定位误差为0.4 mm。

图5 焦平面声压归一化图Fig.5 Normalized graph of focal plane sound pressure

图6 焦平面声压归一化分贝图Fig.6 Normalized decibel diagram of focal plane sound pressure
实验结果证明了通过快速椭圆检测定位方法得到的焦点在-3 dB焦点直径范围内。因此,根据聚焦换能器几何特征提出的基于机器视觉的聚焦换能器焦点快速定位可以实现聚焦换能器焦点的准确定位,大大缩短了焦点的定位时间。
5 结 论
根据聚焦换能器几何特征提出了基于机器视觉的聚焦换能器焦点快速定位方法,并设计了实验方案。结果表明在X轴和Y轴的定位误差均在-3 dB焦点直径范围内,其误差的主要来源是机械臂的定位误差和标定误差。该方法操作简单,定位效率高,可广泛应用于聚焦换能器的声场测量。由于只适用于具有圆或椭圆特征的聚焦换能器,故应用具有一定的局限性。
猜你喜欢
现代工业经济和信息化(2022年9期)2022-11-03
小资CHIC!ELEGANCE(2022年1期)2022-01-11
计算机技术与发展(2020年4期)2020-04-30
电加工与模具(2020年2期)2020-04-29
水下无人系统学报(2020年1期)2020-03-06
中国新通信(2019年23期)2019-03-27
电子制作(2018年2期)2018-04-18
南方周末(2018-03-08)2018-03-08
科学中国人(2017年22期)2018-01-02
舰船电子工程(2017年11期)2017-12-25