海上船舶智能检测及其关键算法研究
2022-11-30 05:28张训源王华超吴庆海蔡喜光
现代制造技术与装备 2022年10期
张训源 王华超 吴庆海 蔡喜光
(1.威海海洋职业学院 机电工程系,威海 264300;2.威海市智慧海洋渔业装备工程技术研究中心,威海 264300)
海上船舶检测是运用检测算法标定图片或视频中船舶的检测技术。在科技飞速发展的今天,以图像为载体的目标识别技术在日常生活中应用广泛。但是,在实际检测中,海上环境的多变性会导致船舶以各种姿态出现。海浪、光照变化等因素复杂多变,使得海上船舶检测效果不够理想。此外,高分辨率摄像机的日益普及也给实时检测带来了机遇。
在以图像处理为背景的目标检测算法中,基于统计学习的检测算法比较常见。该算法需要在大量的正负样本下,从数学角度描述特征,得到特征算子[1]。现有的算子多采用Haar小波[2-3]、主分量分析[4-5]、方向梯度直方图(Histogram of Oriented Gradient,HOG)特征等算法来提取特征点[6],再应用支持向量机(Support Vector Machine,SVM)、AdaBoost和决策树算法[7-9]进行分类。其中,HOG+SVM检测算法最经典,应用也最广泛。
通常一张图片会包含多个尺度的船舶,因此在检测时普遍采用多尺度滑动窗口法进行全局遍历式搜索。这个过程需要对每一个滑动窗口提取特征。一幅N×N大小的图像,候选窗口有N4个,而大多数的窗口都不包含检测目标。所以,如何减少滑动窗口的数量和降低算法耗时,是提升检测速度的关键。人在识别图像中的检测目标时,往往会快速过滤背景区域,将注意力集中在显著区域。以此为背景,众多学者提出了一系列快速过滤算法。例如:魏丽等人通过普残留显著性检测构建似物性分析,实现了红外图像行人检测,但后续处理过程较为复杂[10];程明明等人提出的规范二进制梯度特征(Binarized Normed Gradients,BING)是一种新的描述算子,可以快速标记一幅图像中的似物性物体,算法简单,检测速度快,但属于多尺度、无类别标记,需要进一步处理候选框[11]。
基于此,本文在BING似物性检测的基础上引入一种基于相似度匹配的筛选模型。首先,似物性检测在图片中标记一系列的似物性候选框。其次,选取场景中某一检测目标的向量直方图作为匹配模板,计算似物性候选框与模板的相似度,过滤相似度低的其他类别物体。最后,对剩余候选框进行最终的判别。
1 基于Prewitt算子的海天线检测
在海上进行船舶检测,首先要解决检测区域问题。摄像机捕捉到的画面包括两部分,分别是海水和天空。待检测图片,如图1所示。由于船舶不会出现在天空中,因此需要标定海面与天空的分界线,以减少飞机、云朵等干扰因素,如图2所示。Prewitt算子是一种一阶微分算子,利用像素点上下左右邻点灰度差,在边缘处达到极值检测边缘,对噪声具有平滑作用,可以有效检测海天线。
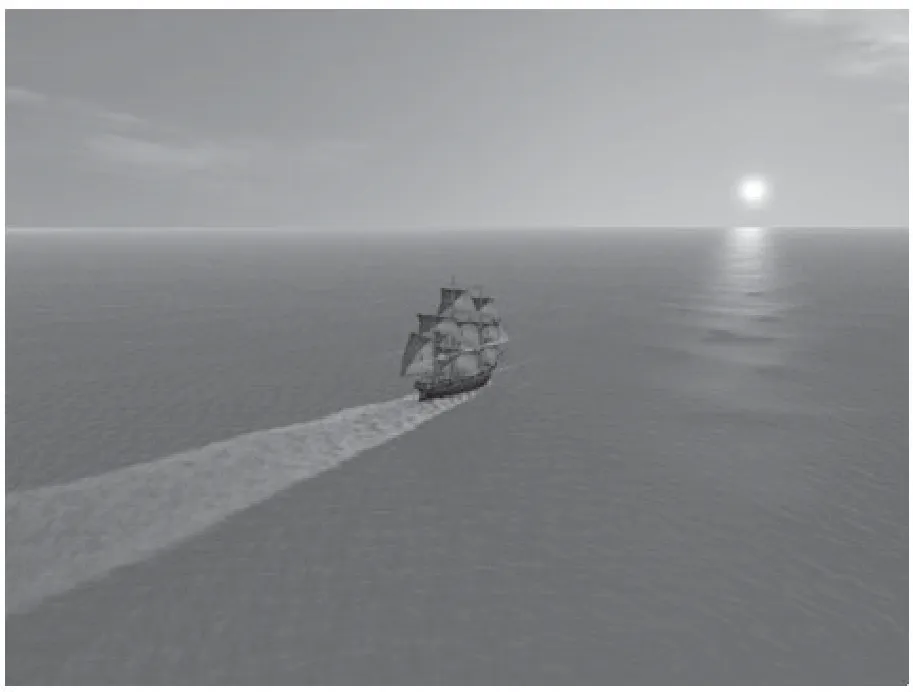
图1 待检测图片

图2 海天线标定
2 基于似物性度量的初步检测
似物性是指与类别无关的所有物体。在一幅图像中,“物体”最大的特点是具有良好的封闭轮廓,而与之对应的背景元素则是单一或杂乱无章的[12-14]。似物性检测作为第一级分类器,训练时把有物体属性的图片作为正样本,将背景图片作为负样本,将所有的正负样本图片大小缩放到8×8,计算每个样本的64维梯度值即规范梯度特征,如图3所示。

图3 规范梯度特征
在检测物体时,所有的窗口都会缩放到统一的尺度进行判别,因此规范梯度特征对目标的尺度和纵横比有良好的适应性。为进一步提高算法速度,对规范梯度特征进行近似运算,计算公式为

式中:bk,l为提取的BING特征值;gt为BING的近似值;Ng为近似位数,即实验用的BING特征向量位数。
筛选时,利用得到的分类器ω∈R64对所有扫描窗口打分,计算公式为

式中:st为扫描窗得分,分值越高,表示该区域包含物体的可能性越大;gt为规范梯度特征;i为检索尺寸;(x,y)为窗口位置;l为i尺存下的坐标。
似物性搜索运用的是多尺度滑动窗口法。不同大小的窗口包含物体的概率不同,因此在对候选窗口打分时采用多尺度打分,即

式中:vi,ω∈R;i为不同尺度的窗口。针对尺度i,得到该尺度下的学习系数。最后,对所有的搜索窗口打分进行排序,选择合适的阈值,将排名靠前的窗口作为似物性候选窗口。
图4为排名前30的似物性候选窗口标定结果。可以看出,船舶、太阳以及海浪等目标都被标定。然而,多尺度搜索导致候选窗几乎布满了整个图像区域,需要在此基础上进一步减少候选窗口数量,把注意力集中在感兴趣区域,进一步提高检测速度。

图4 似物性检测结果
3 基于相似度匹配的快速筛选
似物性检测标记了一幅图像中有物体属性的候选框,这里的物体是多尺度且不分类别的,需要进一步筛选。如图5所示,实验中发现同一场景中船舶与背景的直方图分布存在很大差异。船舶的直方图分布相对分散,而背景图像的分布集中于某一个区间,因此可以利用这一特性过滤掉背景窗口[15-17]。

图5 直方图分布
灰度直方图是像素的统计特征,用来描述灰度像素出现的概率,可表示为

式中:H(P)为灰度直方图的向量表示形式;h(xi)为灰度值xi出现的概率;S(xi)为灰度值xi出现的总次数。
向量间夹角大小可以表示两者的相似程度。将两幅图像的灰度直方图写成向量形式,计算两者之间的夹角,以此判断两个图像的差异度,计算方法为

式中:ra、rb分别为两幅图像的直方图向量;ai、bj分别为直方图中每个维度的数值。由于ra、rb都是正整数,因此θA,B为0°~90°。为了更加直观地看到相似度,将夹角与0%~100%对应,把夹角大小归一化到0~1之间,则A与B的相似度可表示为

式中:S(A,B)为相似度;0.011为将90°归一化到数值100%时的转换系数。
由图6可见,经过相似度匹配,多数背景窗口被成功过滤,初步解决了多尺度似物性检测导致的候选窗口类别多、数量大的问题,但候选窗中仍有少部分背景图片被保留,需要进一步判别。
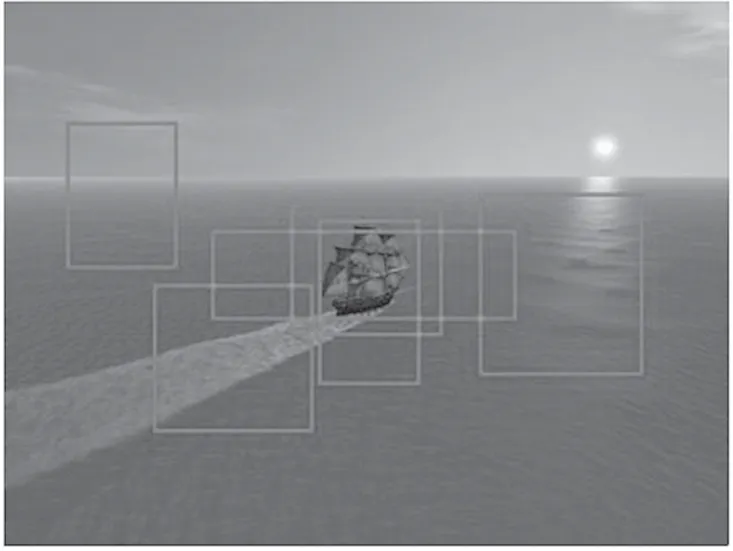
图6 相似度匹配结果
4 基于HOG+SVM的船舶人员判定
某些场合下,船舶检测定位后需要对船上人员进行异常行为检测与跟踪,包括检测船舶上人员的走动以及是否升降旗等异常行为。
HOG特征从数学角度将图像信息整合为向量形式,是对图像的编码,在目标检测方面有较普遍的应用。首先,将图像细分成单元、块、滑动窗口,每4个单元组成一个块。其次,计算每个像素的梯度和方向。最后,将梯度方向按步长平分为9个区间,计算各区间直方图,并用像素梯度幅值作为权重进行投票。每个块中4个直方图按序连接,形成块的特征向量,将块特征向量串联得到一个高维向量,即该图像的HOG特征[18-21]。
实验中选择2 000张大小为96×160且包含行人的图像作为正样本,1 200张大小不一的不包含行人的图片作为负样本,经SVM训练得到行人检测分类器。似物性检测得到的候选框大小远远小于原始图片,因此不再进行滑动搜索,直接提取剩余候选窗口的HOG特征,并使用行人检测分类器进行判定,结果如图7所示。
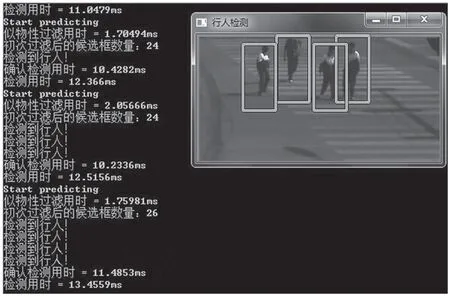
图7 检测结果
5 结语
算法首先利用边缘检测算法提取海天线,提升检测区域的准确性,改善检测算法的实时性。其次,算法利用似物性检测方法初步估计船舶的位置,以方便后面对检测区域的划定和相应的船舶目标提取。再次,利用相似度匹配方法排除干扰项,锁定船舶位置。最后,利用HOG+SVM方式对船上的人员进行识别定位,进一步判别船上人员有无危险行为。实验结果表明:一方面,算法可准确有效实现海上船舶的检测,借助行人检测技术实现对船舶人员的识别;另一方面,算法只是对船上人员进行检测,后续需进一步研究船上人员的具体行为判别。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
能源工程(2022年1期)2022-03-29
数学物理学报(2022年1期)2022-03-16
数学物理学报(2021年6期)2021-12-21
韩国语教学与研究(2021年1期)2021-07-29
煤气与热力(2021年6期)2021-07-28
应用数学(2020年2期)2020-06-24
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
摄影之友(影像视觉)(2018年12期)2019-01-28
初中生世界·八年级(2017年3期)2017-03-24