基于Cohen-Sutherland编码理论的光栅信号数字细分算法研究
2022-11-30 05:26:54王朝峰林江海
现代制造技术与装备 2022年10期
王朝峰 张 玉 林江海
(山东省机械设计研究院,济南 250031)
光栅是一种高精度测量仪器,被应用于高精度加工、检查以及坐标方向测量。莫尔波纹是一种以光栅的相对移动为基础的技术。因为该光栅的相对运动,传输光的光强会周期性改变。该光强信号被硅光单元转换成具有周期变化的电子信号(正弦波),并在一组信号中进行一组处理,从而得到该光栅的相对位移。然而,单靠对其周期的估算远远无法达到准确的检测要求。在计算机技术快速发展的今天,对莫尔条纹进行高阶、高精度数字分割已经势在必行。
数字化分割技术是一种新的、行之有效的方法,是目前国内外学者关注的一个热点问题。当前,常用的数值划分技术多采用软件实现,如将“插值”与“四边形”相结合,利用数学模型建立新的曲线方程式程[1-3],即纯粹的硬件划分[4-5]。然而,这些技术中的细分技术数目较小(通常是500以下)且线路较多,容易造成信号干扰,影响有效信号。由于资料的准确性下降,资料加工困难,很难达到较高的解析度。
文中使用计算机软件中的“大号”和“细分小号”相结合的方法进行划分[6]。在细分方面,利用分段运算和正余切功能,既能提高分辨能力,又能保持线性特性。该方法利用快速计时器芯片进行运算,而小数运算通过软件的分解来实现。莫尔条带循环可逆算,而小数计数法则是莫尔条带细分的一个周期。本文以光栅微机上的软件为对象,在此基础上利用Cohen-Sutherland编码原理对相位划分进行详细的分析[7-8]。
1 数字细分理论
光栅测试装置是利用光栅法实现对输入量(位移、角度等)进行变换和输出的一体化测试装置。光栅测光的基本原理是利用光栅对来自光源的光进行调制,把机械位移量转化为光学信号,并将其转化为可根据光线的调制而改变的交流电信号。通过不同的加工、转换,可以对不同的力学、形位进行对应的检测。在测定长度时,光栅是以间隔W为单位的编码标尺。如图1所示,编码标尺的同时,利用光栅作为基准进行对比和测定,可以从被测物体上读出X,表达式为

图1 光栅精密测量定位原理

式中:N为AB间的光格计数;δ、δ1、δ2分别为在AB两端对应的光格上读取划分的小数值。
可见,栅格的测量本质上是相应的格线N个数和少于节距的点数的总和。
如果测量精度允许对十进制值进行四舍五入,则可将方程式简化为

因此,光栅长度可以通过简单地读取光栅栅线的数量N获得。
如果测量精度不允许四舍五入到十进制值,则必须细分光栅间距。假设可以将间距细分为n个相等的部分,则栅格细分的分辨率为

此时,测得的小数部分为

式中:m=0,1,2,…,n。
将式(3)和式(4)代入到式(1),并令M=N·n+m,则

从而得到测量单位最小的系统方程。
实践中,若以栅格角度或栅格角度为单位,仅可求出整列间隔,其数值精确性远低于以上所提需求。为了达到要求的精确度,选取合适的栅格间隔进行划分,然后通过对间隔的划分获取最低的读出值来提高设备的解析度。需要说明的是,细分是指一条莫尔带上的多条测量脉冲。
在传统技术中,常采用细分法进行测量。该方法具有简便、信号要求低的特点,适用于静、动两种不同的测量方式,但划分数目较少。移位电阻链法是一种比较精细的测量方法,但是电路比较烦琐,信号的正交性很强,且测量的准确率受到零漂的限制。振幅分裂电阻链方法具有精确性好的优势,不会受到信号的幅值和振幅的影响,可以实现动静两方面检测,但是线路比较烦琐。锁相细分法具有细分数量大、电路简单以及信号不严谨等优点,只适用于动态检测,但均匀性好,光栅运动高。载波法具有较大的细分能力和较高的准确率,但是线路比较烦琐,同时其波形学和正交度比较高。
从上述结果可以看到,在需要进行大规模划分时,若采用硬体划分,将会造成较大的困难,并不适合于单纯的硬件实施。莫尔条形码的划分是利用计算机程序对其进行划分,再利用程序划分,即利用采集与储存的资料将莫尔条纹的两个相位为90°的脉冲输出信号进行数字化处理,并进行多次波形和数码展示。利用计算机软件细分,可以使装置的硬件结构更加简单,降低线路对有效信号的干扰,加强装置的性能,改善装置的准确度。
2 数字细分算法
如图2所示,莫尔条带在理论上并非正弦脉动,而在槽宽为W/2(也就是代表光栅的光透过部)和空隙为0时得到三角波形。然而,在现实的构造中,光栅的信号会改变。光束的不均匀性和光的衍射效应,光罩面间光的反射,光栅光罩的凹凸不平等,均会改变光栅信号,变化曲线接近图3。
从图3可以看出,在出相与暗相的光发射端,一个正弦波的信号被光器件生成。从图2可以看出,按照光电变换的原则,光学信号被变换成电信号,此时仍然是正弦信号,可以用一个正弦波来代表

图2 光栅理想信号

式中:U为光电元件输出信号;W为光栅栅距;X为位移;Up-p为信号峰值;Ucp为直流电平。
与图3相似,在光器件收到明暗色的正弦信号后,按照光电变换的原则,把该光学信号变换成电信号仍然是正弦波,也可以由式(6)来表达这个正弦波。

图3 光栅实际信号
通过计算、区分、细分和小数计数等全周期,采用相角偏差90°的正弦型和余弦型进行测量。在幅度调节时,真实的信号U的幅度会随着电源波动、光强度和光栅间距而变化。但是,由于气温等环境因素的作用,系统无法获得精确的变形信息。
分析表明,当两路莫尔条纹的振幅改变相同时,振幅U的波动效应可以用莫尔条带的正弦和余弦比例来抵消,即这里U为振幅,θ为相位角度,由此确定位移。
在两个莫尔条带的幅度改变相同的条件下,可以用莫尔条带的正弦与余弦之比排除幅度U起伏的效应,并隐藏一定的位移量。这样可以根据得到的数值获得相位角,进而得到相应的位移量。
以sin光栅信号与cos栅极信号的过零及其绝对等效处为界,将一栅格循环划分为8个具有相位角度的区,并将8个区的基础设为0、100、200、300、400、500、600以及700(此处是800个划分实例,实践中如果有必要,可以在该方案中增加划分倍数),见图4[9]。

图4 细分原理图
利用以上划分原则,将一个周期(0°~360°)的正弦波信号划分为8个区间,各分区使用三位二值码,右侧为首位[7]。假设每一次获得的两个测量信号的数值是Usin、Ucos,编码规则为:若Usin>0,则第1位置1,否则为0;若Ucos>0,则第2位置1,否则为0;若|Usin|-|Ucos|>0,则第3位置1,否则为0。
根据该编码规律,可以方便地求出各基元的编码数值,方法如表1所示。
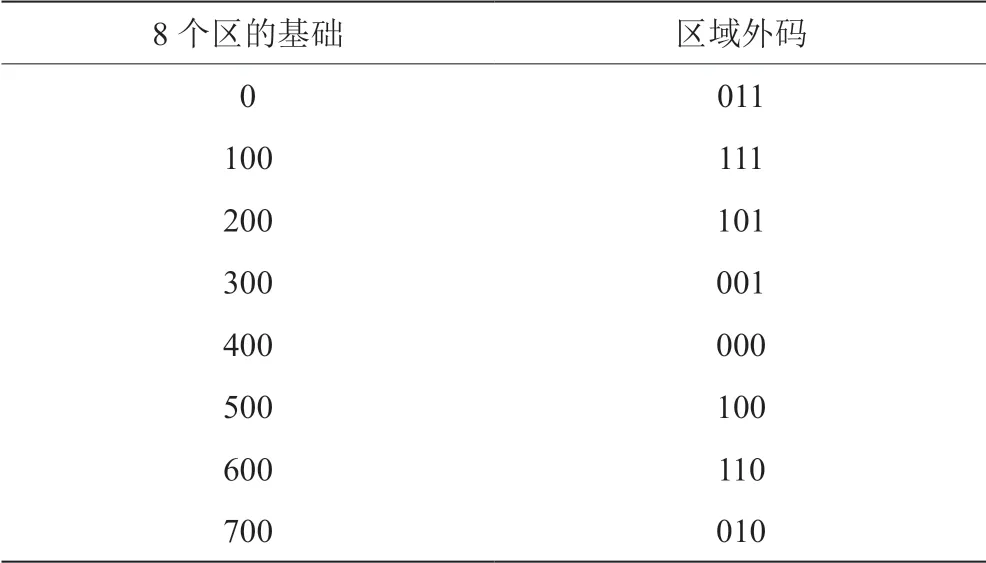
表1 区域外码
相位角分成8个区域后,由三角函数图像和性质可以得到区域外码判别的方法,如表2所示。外码中的每一位被置成1(真)或0(假),就能得到对应区域三位二进制代码。

表2 区域基数与外码对应表
由编码规则很容易得到每个基数对应的编码值。基于Cohen-Sutherland编码理论的相位角区域编码算法具体步骤如下。
步骤1:定义一个含有4个成员变量的类CCode,成员变量为all、sin、cos、sc。
步骤2:完成编码。
步骤2-1:初始化CCode对象的成员变量all、sin、cos、sc分别为0;
步骤2-2:获取测量信号值Usin、Ucos;
步骤2-3:如果Usin>0,sin=1,否则sin=0;
步骤2-4:all+=sin;
步骤2-5:如果Ucos>0,cos=1,否则cos=0;
步骤2-6:all+=cos;
步骤2-7:如果|Usin|-|Ucos|>0,sc=1,否则sc=0;
步骤2-8:all+=sc。
步骤3:输出编码结果。
以表1中的区外代码为基础,识别获取的数据,即寻找一个地区基础数值,然后把该地区的基础值和各分区的分区进行综合,将一个循环的800次分割开来。对于在任意i上的一个信号数值,相应于这个位置的一个小的数值Xi为


按下列方式运行算法,计算每次获取测量信号的外码,由循环语句判断该外码值对应的区域基数。同时,根据外码值的奇偶性,决定调用式(8)或式(9)计算对应区域的细分值。信号处理流程如图5所示。

图5 光栅信号处理流程
3 结语
从理论上研究了测量栅格的技术原理,提出了莫尔条纹细分算法。通过对通用齿形测试仪的实际使用,证明了所提方法可以对800个光栅格进行分割,50根/毫米的光栅解析仪的分辨率超过0.025 μm,具有较好的转化效率。与传统的硬件细分方法比较,它的精度可以达到1~2个百分点。试验结果表明,该控制方案性能良好,工作性能稳定,并有较好的抗噪声性能和很强的灵活性,能够根据实际需求和计算机软件实现精确划分。
猜你喜欢
科技创新与应用(2021年31期)2021-11-09 13:11:18
花火·绘阅读(2021年8期)2021-09-05 07:50:57
华人时刊(2020年23期)2020-04-13 06:04:12
童话世界(2019年28期)2019-11-23 08:44:58
专用汽车(2016年9期)2016-03-01 04:17:02
弹箭与制导学报(2015年1期)2015-03-11 15:32:23
专用汽车(2015年2期)2015-03-01 04:05:42
出版与印刷(2014年3期)2014-12-19 13:08:22
知音海外版(上半月)(2014年10期)2014-05-14 12:16:15
雷达学报(2014年4期)2014-04-23 07:43:13