
基于图像识别技术和轨道机器人的大坝安全智能移动巡检系统研发
2022-11-28 06:38:56李龙飞李君军郑晓红
中国农村水利水电 2022年11期
李龙飞,李君军,赵 杰,季 昀,李 倩,郑晓红
(1.国能大渡河流域水电开发有限公司,四川成都 610000;2.中国电建集团华东勘测设计研究院有限公司,浙江杭州 310000;3.国家能源局大坝安全监察中心,浙江杭州 310000)
0 引言
水库大坝除涉及自身经济效益外,其安全与否还关系到影响范围内的人民生命财产安全,因此,大坝安全监控具有重要意义。目前,大坝安全监控主要依托仪器监测和巡视检查两种手段,两者相辅相成,均为及时发现大坝潜在安全隐患、保障大坝运行安全的重要手段。随着近年来若干高坝大库的建设和投运,大坝安全监测仪器不断改进,监测自动化技术迅速发展,但受到仪器监测在时空上不连续特性的限制,目前仍无法仅依靠仪器监测即实现大坝安全的全面监控,因此,做好巡视检查工作仍具有重要意义[1]。
近年来,水库大坝安全巡检技术的发展主要侧重于研发基于掌上电脑(Personal Digital Assistant,PDA)、标 签(Radio Frequency Identification,RFID)、近场通信(Near Field Communi‐cation,NFC)、智能手机终端等技术的智能巡检系统,以有助于水工人员对巡检信息进行记录和分析,但巡检基础信息的获取仍为传统模式,即主要通过水工人员现场查看、拍照、记录获得[2-4]。传统人工巡查方式存在依靠肉眼观察或无人机巡航观察而使得巡查范围和对象受限、在暴雨和地震等极端工况下水工人员难以到达重要巡视点、高坝大库人工巡检工作量过大等不足之处,因此,研发一套能够远程控制的移动巡检系统获取更为丰富的巡检基础信息具有重要的工程应用意义[5-8]。基于图像识别技术[9]和轨道机器人,研发了一套适用于水库大坝安全监控的远程移动巡检系统[10,11],并以某水库大坝为例进行了场景应用。
1 大坝安全智能移动巡检系统总体结构设计
大坝安全智能移动巡检系统的研发目标和主要作用包括:实现巡视检查成果的定量化、数字化、信息化,提高巡视检查成果的可读性、易用性;提高巡视检查的工作效率,提高大坝全生命周期管理,实现实时化的信息感知,快速发现工程缺陷和安全隐患,保障大坝安全;高效应对安全风险,实时反馈信息,辅助决策支持,与大坝安全相关的各项系统建立应急联动机制;契合大坝安全管理的行业特点,以及相关管理制度要求,助力水库大坝管理单位及上级管理部门的日常管理需求。
为实现上述研发目标和作用,本系统包括数据层、解析层、融合层、应用层共四个层次,具体架构如图1所示。
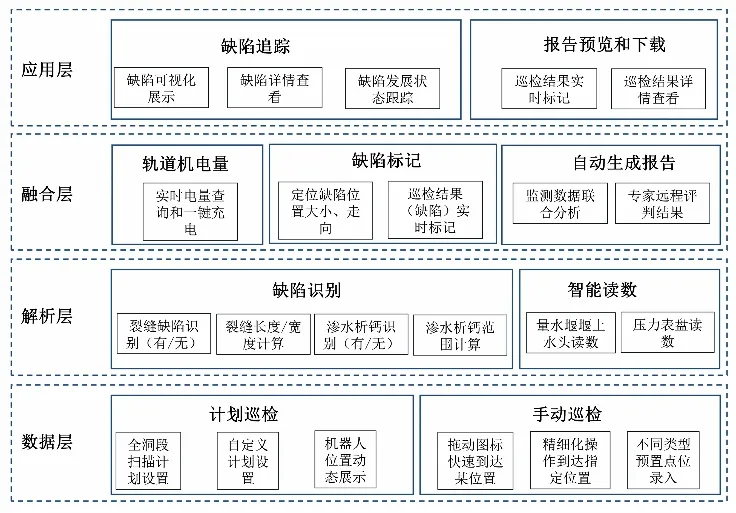
图1 大坝安全智能移动巡检系统总体结构Fig.1 General structure of intelligent mobile inspection system for dam safety
数据层指数据的来源和获取的方式。主要通过系统的“计划巡检”和“手动巡检”这两个功能模块实现。“全洞段扫描计划”可以通过轨道提供的实时位置定位、垂直升降杆的伸缩长短和云台的旋转角度、焦距值等参数的组合计算结果,对整个巡检场景进行分割,实现整个场景的全方位智能巡检;“自定义计划”可根据用户的需要定义巡检路线和巡检部位(横缝、有缺陷处、已安装埋设的测压管、量水堰等监测设施处);在巡检过程中,机器人的实时位置可以动态展示在系统页面上。某些特定场景下,若需要进行手动巡检,可以通过拖动图标让机器人快速到达指定位置,在通过遥控杆手动调节,使其位置和拍摄角度更精确,在进行手动巡检时,还可以随时添加预置点位。
智能巡检成果主要为图像数据,解析的内容包括缺陷(本次研究主要针对裂缝和析钙渗水)识别、裂缝(或横缝)开合度计算、表盘自动读数。对于任意巡检得到的待解析图像,首先通过卷积神经网络[12]处理进行图像特征提取以得到高维的特征图,基于特征图,进一步开展裂缝识别和渗水析钙等缺陷的目标检测。再通过将多区域提取的裂缝进行融合以形成最终的裂缝并通过像素统计,结合凸透镜成像原理将像素长度换算为实际裂缝长度,实现裂缝长度的识别计算。对于渗水析钙而言,除了识别有∕无,还可以通过bounding-box 统计矩形标注框的长度和和宽度,结合凸透镜成像原理可直接换算得到区域的长度、宽度和面积。对于压力表盘读数而言,首先通过目标检测模型确定图像中是否存在表盘,再通过直线拟合得到指针角度进而换算为表盘读数。量水堰堰上水头采用特定装置将其读数转化成表盘指针(见图2),读数原理同压力表盘读数。
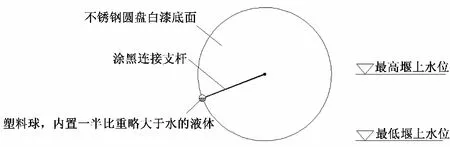
图2 表盘式堰上水头读数装置Fig.2 Dial type weir head reading device
融合层将解析层获取的有效信息、轨道机信息与本工程仪器监测信息(包括环境量、大坝变形、渗流监测数据等)以及专家经验等信息进行融合,为大坝安全的综合研判提供支撑。解析层识别的缺陷结果(包括位置信息、大小、走向等)可实时展示在三维模型上,并根据巡检过程实时标记;在“自动生成报告”功能模块中,将缺陷信息、仪表读数信息和对应部位监测数据信息进行综合呈现。在特殊情况下,还可以请专家通过手动巡检查看现场情况,进行专家远程评判和支持。
应用层可对整个巡检结果进行可视化展示、详情查看和时间序列的缺陷发展趋势追踪、测值发展规律呈现等。同时提供巡检报告的预览和下载。
2 系统业务流程
采用智能移动巡检系统开展远程巡检业务流程见图3。使用该系统时,可根据不同情况触发机器人进行巡检。一是通过设置定时任务让机器人定时自动巡检,二是设置预警规则,在监测数据进行预警时及时启动自动巡检,并自动关联重点部位,重点查看预警部位;三是在地震、洪水等特殊工况时,启动自动巡检。任何情况下均可进行人工手动巡检。
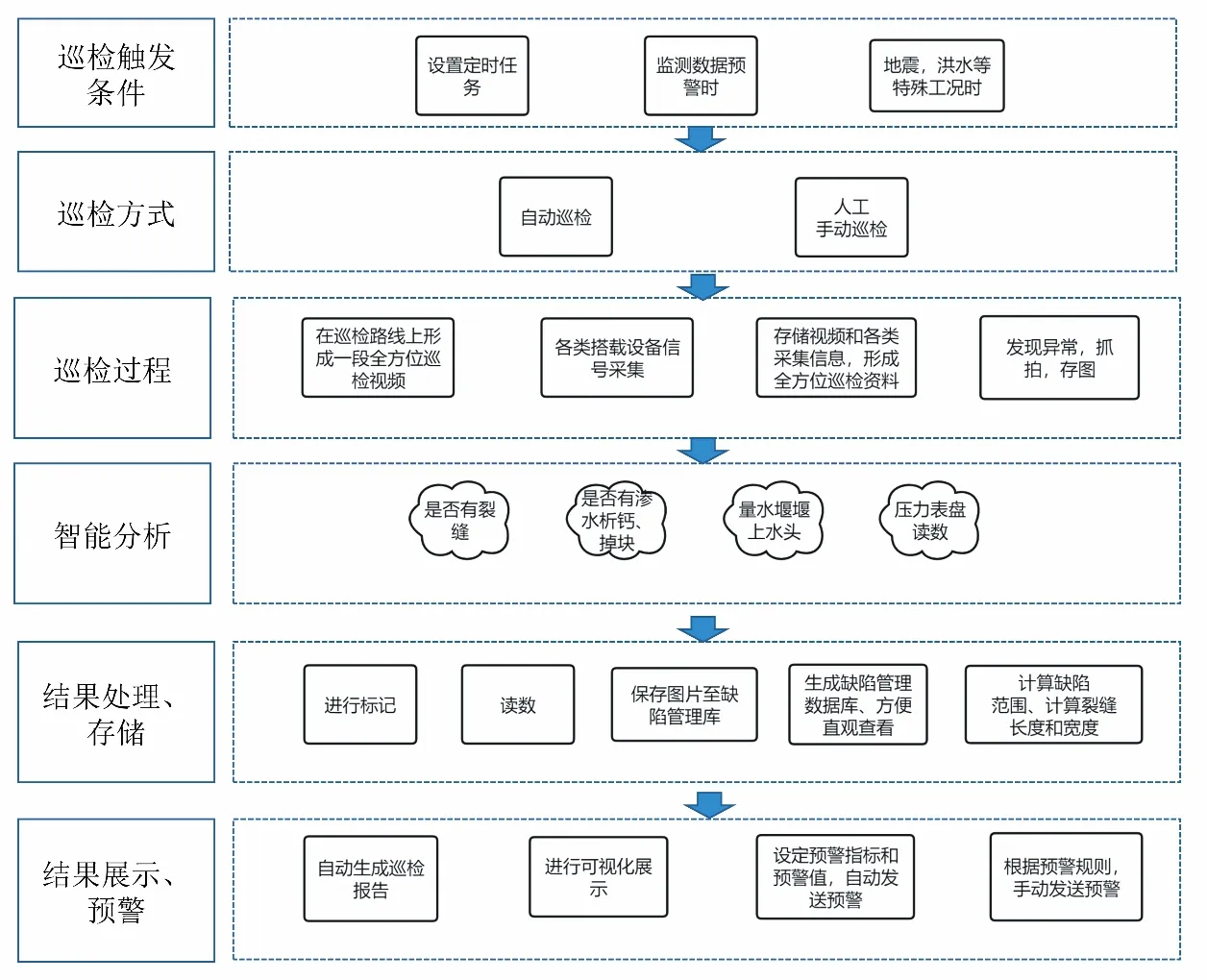
图3 大坝安全智能移动巡检系统业务流程Fig.3 Process chart of dam safety intelligent mobile inspection system
在巡检过程中,通过搭载的各类设备可采集到巡检部位的声、光、气等综合信息,并对综合信息进行存储、分析。
基于图像识别技术,将巡检图像数据进行解析[12-14],内容包括缺陷(主要针对裂缝和析钙渗水)识别、裂缝(或横缝)开合度计算、表盘自动读数。
智能分析的结果均永久存储在服务器中,并将分析结果标记在原始图片上,形成缺陷管理库,记录缺陷参数信息。
最终形成巡检报告,包含上述所有巡检信息。该系统和提供可视化巡检结果展示,将缺陷信息实时标记在巡检结构的三维模型上。并通过设置预警指标(包括新增缺陷数量、缺陷发展趋势等)和预警值(裂缝长度日增涨量、量水堰读数日增长量、压力表盘日增长量等)。
3 示范应用
3.1 工程背景
某水库挡水建筑物为混凝土双曲拱坝,最大坝高210 m,坝顶高程1 135.00 m,坝身设有4个泄洪深孔。坝下设水垫塘和二道坝,水垫塘全长220 m,二道坝为混凝土重力式,最大坝高37 m。
该大坝地处偏远,廊道环境潮湿,空间狭小,结构复杂,水电站工作人员日常巡视检查工作量和难度均较大,且在极端工况下难以及时掌握廊道内运行情况。高程940 m廊道为拱坝基础廊道,廊道内的变形、渗流情况可直观反映拱坝坝基和坝体运行性态,其顶拱及上游边墙存在少量裂缝、渗水析钙等缺陷,廊道内设有测压管、量水堰等监测设施。
3.2 系统应用
作为示范应用,在本工程廊道顶拱布置一套智能轨道行走式挂载系统(轨道机器人),轨道沿廊道顶拱轴线敷设,巡检范围对廊道断面进行了全覆盖,巡检重点为廊道顶拱和边墙的主要缺陷及重要监测设施。基于图1所示架构构建了一套大坝安全智能移动巡检系统,其功能模块包括设置智能巡检项目、频次及要求,设置智能轨道机器人的运动控制策略、智能轨道机器人的路径规划策略,存储和查询巡检基础信息(含视频和图片)以及基于图像识别技术识别缺陷类型、特征和监测设施读数等,实现大坝安全巡检的智能化应用。现场安装情况见图4。系统功能典型页面见图5、图6。

图4 大坝廊道轨道机器人照片Fig.4 Photo of orbital robot installed in the dam gallery
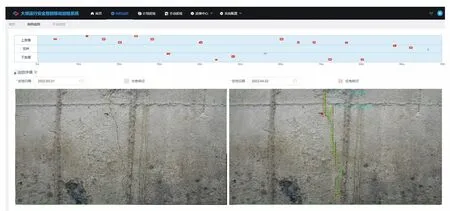
图5 缺陷追踪页面展示Fig.5 Web page of defect tracking

图6 巡检计划页面展示Fig.6 Web page of management of patrol inspection plan
3.3 成果展示
利用该套系统进行智能巡检,对现场发现的裂缝缺陷和渗水析钙缺陷进行标记和参数计算同时(图5),将计算出的缺陷大小、位置等参数标记在廊道整体模型上,可根据巡检结果,实时展示,如图7所示。
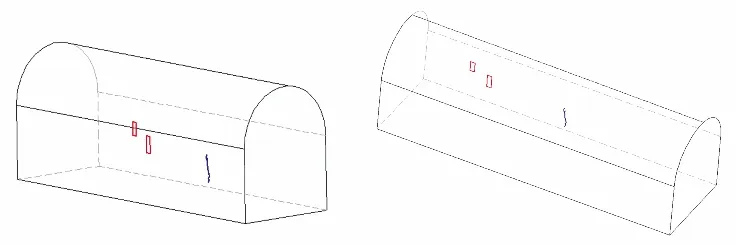
图7 典型缺陷展示Fig.7 Display of typical defects
对巡检范围内的仪表进行读数识别,成果如图8 所示。识别成果可同步录入自动生成的巡视检查报告,实现仪表自动、远程读数。

图8 仪表读数识别Fig.8 Recognition of instrument measured value
4 结论与展望
在大坝运行安全移动巡检方面进行了有益的探索,研究了一套基于图像识别技术和轨道机器人的大坝安全智能移动巡检系统,即基于轨道机器人及其搭载设备实现巡检现场的信息采集,在此基础上,基于图像识别技术进行图像数据解析和融合分析。结合某水库大坝进行了初步应用,取得了较好的应用效果,能有效解决传统人工巡检范围有限、极端自然条件下水工人员难以开展现场巡检等问题,且可有效实现大坝运行安全远程控制移动巡检、缺陷特征自动识别、重要监测设施人工读数装置自动测读等功能。
随着大数据、云计算、物联网、人工智能等新一代信息技术的快速发展和拓展,水库大坝运行管理智能化将得到进一步发展,大坝安全智能移动巡检系统也将得到进一步完善,如进一步细化缺陷特征识别(毫米级甚至亚毫米级裂缝宽度识别)等。
猜你喜欢
社会科学战线(2022年6期)2022-08-25 09:26:56
资源导刊(2020年5期)2020-06-12 11:36:58
百科知识(2018年6期)2018-04-03 15:43:54
中国公路(2017年19期)2018-01-23 03:06:36
中国公路(2017年15期)2017-10-16 01:32:04
中国公路(2017年9期)2017-07-25 13:26:38
中国公路(2017年7期)2017-07-24 13:56:40
西部大开发(2017年7期)2017-06-26 03:13:56
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:49:11
少儿科学周刊·儿童版(2016年4期)2017-02-08 13:48:12
