融合驾驶风格识别的插电式混合动力汽车自适应控制策略
2022-11-25 01:03李奎良林歆悠
福州大学学报(自然科学版) 2022年6期
李奎良,林歆悠
(福州大学机械工程及自动化学院,福建 福州 350108)
0 引言
插电式混合动力汽车(plug-in hybrid electric vehicle,PHEV)因其电池容量大、外部充电、续航里程长等优点而越来越受欢迎[1].然而,拥有良好的能量管理策略是 PHEV 性能的基础.事实上,能量管理策略不仅受交通环境的影响[2],而且与驾驶方式也有很大关系[3].研究表明,喜欢提高驾驶速度和加速度的驾驶员会经历25%至68%的油耗增加[4].因此开展驾驶风格识别的研究和基于识别的驾驶风格设计能量管理策略具有重要意义.
许多学者研究了驾驶方式对传统车或PHEV燃油经济性的影响[5].在文献[6]中,在线部分执行所涉及的能量管理策略,将驾驶员的驾驶风格纳入等效消耗最小化策略(ECMS)中.文献[7]使用模糊逻辑控制器将典型的驾驶循环分类为不同的驾驶模式,并识别实时驾驶模式.实现驾驶员风格识别的第一步是提取特征参数.影响驾驶风格的因素很多,如驾驶员的性格特征、驾驶条件、环境因素等[8],而识别驾驶类型的常用方法是机器学习和基于规则的算法.文献[9]提出一种支持向量机方法来识别驾驶风格并将驾驶员分为两类:激进型和温和型.通过K-means聚类对驾驶风格进行聚类,在此基础上采用支持向量机算法对驾驶风格进行识别,缩短了识别时间,提高了驾驶风格的识别率,同样,Wang等[10]提出一种半监督支持向量机识别方法来提高10%左右的分类准确率.在文献[11]中,卷积神经网络用于提取特征参数,还使用 CNN 对智能手机收集的加速度数据提取有关驾驶风格、车辆、环境和人类特征的知识.在文献[12]中,使用K-最近邻(KNN)、神经网络和随机森林等几种方法将驾驶风格分为正常驾驶和激进驾驶,结果表明具有前向选择的KNN取得了良好的性能.文献[13]设计了一种基于模糊逻辑的驾驶风格识别系统,对不同的驾驶风格进行分类,控制鲁莽驾驶,进而减少交通事故的发生.
尽管已有一些学者将驾驶风格融合到能量管理控制策略的研究中,但大多数对驾驶风格的分类过于简单,这使得设计EMS的连续控制过程变得不灵活.本研究搭建模糊逻辑和神经网络识别模型,将驾驶风格分为6类,提出融合驾驶风格识别的ECMS控制策略,实现基于驾驶风格的等效因子自适应调整.
1 PHEV主要零部件

图1 插电式混合动力汽车结构Fig.1 Plug-in hybrid electric vehicle structure
PHEV的动力系统结构如图1所示,发动机和电机可单独驱动,也可混合驱动,混合驱动的最优转矩分配即可达到最优的燃油经济性.
结合PHEV的纵向动力学特性,汽车在行驶时受到的总阻力矩可表达如下:
Tf_all=Tf+Ti+Tw+Tj=mgrfcosα+

(1)
其中:Tf_all为整车的总阻力矩;Tf、Ti、Tw、Tj分别为滚动阻力矩、坡度阻力矩、空气阻力矩和加速阻力矩;m为整车的质量;α为所行驶的工况坡度;ρair是空气密度;Cd是空气阻力系数;Acar为车辆的前挡风面积;r是车轮的半径;δeng为汽车的旋转质量换算系数;g为重力加速度;v为车速;t为时间.
2 驾驶风格识别算法
考虑到不同的驾驶风格对车辆的燃油经济性和排放性能也有很大影响,在本研究中,将驾驶风格融入到能量管理控制策略的制定中,以促进插电式混合动力汽车的燃油经济性和排放性能.驾驶风格的识别主要分为驾驶风格数据的采集和驾驶风格识别算法的应用,模糊控制不需要建立精确的数学模型且有较强的鲁棒性,能够解决一些非线性的数学求解问题,因而可以应用到驾驶风格的识别中,而神经网络基于历史数据的训练过程中,能够建立出驾驶风格的识别模型从而识别不同的驾驶风格,因而采用该两种方法进行驾驶风格的识别,并通过后面的仿真分析结果确定最优的驾驶风格识别方法.
2.1 驾驶风格数据的采集
对于驾驶风格识别数据的获取,首先选择多名实验人员进行问卷调查,问卷上均是关于其驾驶习惯的相关问题,并根据回答对测试者进行评分.而后依据评分选择一名驾驶行为最激进的人来进行模拟驾驶试验,在驾驶界面上选定运行工况,记录相应的数据.同理,选择一名最温和的实验员来模拟驾驶试验,以此来采集温和型驾驶风格的识别数据.
具体操作如图2所示,驾驶员在仿真界面上根据两车的相对距离踩下油门或刹车踏板,此时测试平台上的数据采集传感器根据驾驶员的驾驶行为动态记录对应的数据,将得到的数据进行相应的平滑处理,并进行驾驶工况的划分,提取出相应的特征参数.记录出相关的特征参数数据,而车速、加速度和油门开度是影响驾驶风格的3个重要因素.

图2 驾驶风格数据的采集Fig.2 Collection of driving style data
2.2 基于模糊专家算法的驾驶风格识别
考虑到油门开度变化率可以最好地反映驾驶员对车辆动力需求的紧迫性,结合节气门开度平均值和节气门开度标准差,进一步精确识别驾驶风格[14].节气门开度平均值及其标准差被视为模糊控制器的输入.通过分析所获得的数据可进行如下设计.节气门开度平均值及其标准差的范围为:[0,0.8],[0,0.4],对应的论域为:小(S),中(M),大(B),选择的隶属函数类型为梯形和三角形的组合.输出的是驾驶员风格,驾驶风格根据其激进风格和温和型风格分为六种类型,如下所示,Slevel={-3,-2,-1,1,2,3}.平均油门开度均值及其标准差隶属函数如图3 所示.模糊推理算法采用常用的Mamdani法,而去模糊化则采用面积重心法将模糊推理结果转化为实际控制量[15].

图3 模糊控制器输入量及输出量的隶属度函数Fig.3 Membership function of the input and output of the fuzzy controller

表1 驾驶风格识别的模糊推理规则 Tab.1 Fuzzy reasoning rules for driving style recognition (%)
车辆的节气门开度均值和节气门开度均方差越大,则代表车辆加速度越大且相互之间的波动也越大,即代表其急加速急减速的次数较多,也就是说驾驶风格越偏向激进型.归纳的驾驶风格识别的模糊推理规则如表1所示,图4为其相对应的模糊规则map图.
2.3 基于神经网络的驾驶风格识别
为了采用神经网络算法识别出不同驾驶风格类型,首先引入K-means算法将驾驶员风格类别进行划分,将驾驶风格类型分为6类.具体操作如下:分别提取温和型,激进型驾驶员的行驶数据,得到出他们各自的节气门开度均值,并计算出节气门开度均方差,并将其作为划分驾驶风格类别的特征参数,将驾驶风格等级划分为Slevel={1,2,3,4,5,6},Slevel=6,代表驾驶员操作风格最为激进,分类结果如图5.
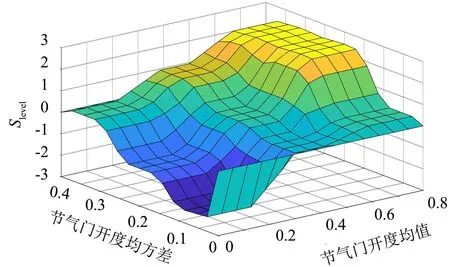
图4 驾驶员风格识别模糊规则Fig.4 Fuzzy rules for driver style recognition

图5 K-means驾驶风格分类结果Fig.5 K-means driving style classification results
根据分类的结果,以此作为分类依据,用于BP神经网络的数据训练,从而实现实时分类驾驶风格类别.BP神经网络由输入层、隐含层和输出层组成[16].将输出结果和期望结果之间的误差经中间层反馈给输入层,通过各网络层神经元的权值和阈值可以根据误差的大小进行调节,最终使得输出结果不断逼近于期望值.将节气门开度和节气门均方差作为神经网络的输入层,输出结果为6种不同程度的驾驶风格类别,神经网络识别如下.
1) 各网络层神经元个数的确定.将2个典型的特征参数作为BP神经网络的输入,故输入层的神经元个数为2,即Nin=2,共构建了6种驾驶风格类别,因此神经网络输出层的神经元个数为6,Nout=6,即隐含层的神经元个数一般参考经验公式,即:取α=6,计算得Nh=10.

(2)
2) 选择神经网络的激励函数,训练函数.分别选择Tansig函数和Purelin函数作为隐含层和输出层的激励函数,公式如下.

(3)

图6 驾驶风格神经网络识别模型Fig.6 Driving style neural network recognition model
综合考虑所采用的BP神经网络的复杂程度、权值数量和驾驶风格识别的分类情况,最终选择Trainlm函数作为训练函数.
3) 迭代次数为1 000次,训练目标性能为10-6.驾驶风格神经网络识别模型如图6所示.
3 融合驾驶风格的自适应控制策略
通过自定义的监督控制策略,混合动力系统中的动力分配可以按照最优化燃料经济性进行动力系统的分配.采用融合驾驶风格识别的最小等效燃油消耗控制策略(ECMS)进行能量的分配.
3.1 ECMS的制定
ECMS是一种实时方法,无需使用有关未来的信息,将全局优化问题简化为瞬时最小化问题.在数学上,混合动力系统在燃油经济性方面的优化控制问题可以概括为

(4)
对于求解方程(4)使用庞特里亚金极小原理(PMP)构造Hamilton函数求解[17],如下:

(5)
其中:λ(t)是拉格朗日乘数.基于 PMP,共态方程表示如下:

(6)
(7)
其中:SOCf代表行程结束时电池的 SOC 值;SOCobj是目标 SOC 值;SOCmin、SOCmax分别是电池的最小值和最大值.动力电池的功率由下式得到:
Pb(t)=IbVoc
(8)
式中:Voc表示电池的开路电压.结合式(6)和(8),则式 (5) 可改写为:

(9)
结合等式(6)和(9),s(t)可以表示为:
(10)
对于 PHEV,ECMS的关键是找到最佳的等效因子s(t)以获得电池和发动机能量的最佳实时分配.然而,在标准 ECMS 中,等效因子是恒定的,不能适应不同驾驶员,因此要针对不同驾驶风格来相应调整等效因子,以实现等效因子随着驾驶风格的变化而变化,提高整车控制策略对于不同驾驶员的适应性.
3.2 融合驾驶风格的A-ECMS制定
为了获得最小总燃油消耗,有必要使控制策略的制定适应个体驾驶员.因此,本研究提出融合驾驶风格的自适应ECMS(AECMS)的制定.对于电荷可持续性,等效因子通常根据SOC与其参考值的偏差(SOC(t)-SOCr)进行自适应调整.自适应等效因子的表达式如下:

(11)
将式(11)用更为精确的PI 控制器控制,如下式所示:

(12)

为了确定实时等效因子的系数,将考虑驾驶风格的参考SOC与实时SOC的差值及其变化率作为模糊控制器的输入.对两个输入信号的模糊化,以及基于模糊规则的模糊推理,最终推理出比例系数和积分系数两个输出.由于三角隶属函数灵敏度高、计算简单,因此输入输出均采用三角隶属函数,定义的语言变量为“负大(NB)、负小(NS)、零(ZR)、正小(PS)、正大(PB)”.输入和输出字段为[-0.1,0.1]和[-1,1],模糊控制规则如表2和表3所示.
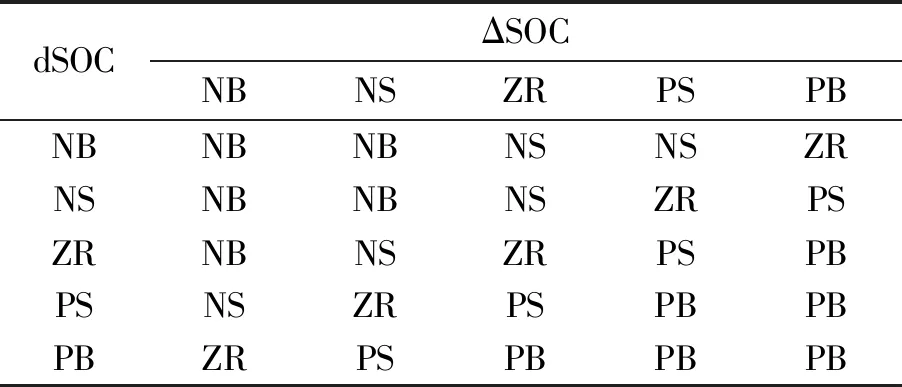
表2 Kp模糊推理规则Tab.2 Kp fuzzy inference rules
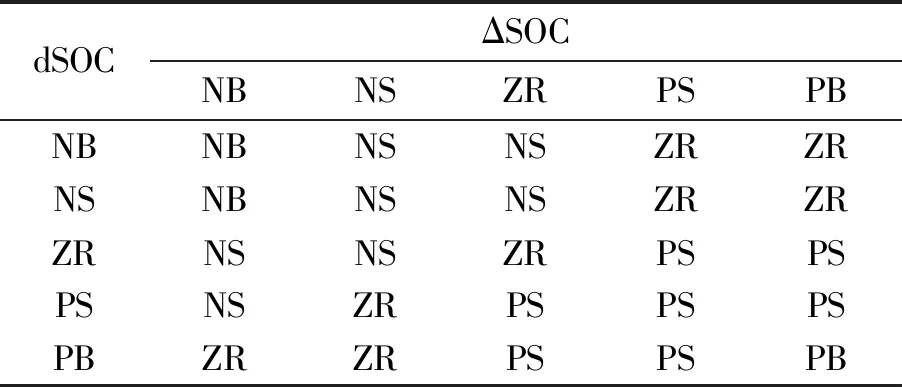
表3 Ki模糊推理规则 Tab.3 Ki fuzzy inference rules
4 实验验证及结果分析

图7 NYCC行驶工况Fig.7 NYCC driving conditions
基于MATLAB/Simulink,搭建适用PHEV性能的仿真模型,采用NYCC工况,针对本研究提出的融合驾驶风格的自适应控制策略进行验证,如图7所示.
图8(a)展示了驾驶员在ECMS控制策略、模糊逻辑识别驾驶风格的自适应ECMS(AECMS_FLC)和神经网络识别驾驶风格的自适应ECMS(AECMS_NN)控制策略下,SOC随PHEV行驶的变化.由图可知,常规ECMS控制策略的SOC曲线在行驶整段路程后,SOC值较低,当融合驾驶风格识别后的ECMS后,SOC值有明显的提升,此时更能保护电池,延长使用寿命.图8(b)展示了3种控制策略的油耗(Q)情况,由图可知,融合驾驶风格的控制策略,因为能够可以根据驾驶员的驾驶风格对控制策略进行自适应地调整,因而在行驶里程结束时,油耗有明显的降低,而神经网络识别驾驶风格对应的控制策略效果更好.图9(a)展示了时间不变ECMS的等效因子与所提出的融合驾驶风格识别的自适应ECMS控制策略在行驶工况下的变化图.从图中可以发现,自适应ECMS控制策略的等效因子随着时间的延续而不断发生变化,具有更好的适应性.图9(b)展示3种控制策略的HC、CO、NOx总排放曲线图.

图8 3种不同控制策略的SOC曲线变化和油耗图Fig.8 SOC curve change and fuel consumption curve of three different control strategies
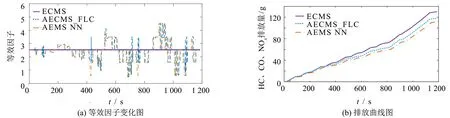
图9 3种控制策略的等效因子变化图和总排放曲线图Fig.9 Equivalent factor change and total emission curve of three control strategies
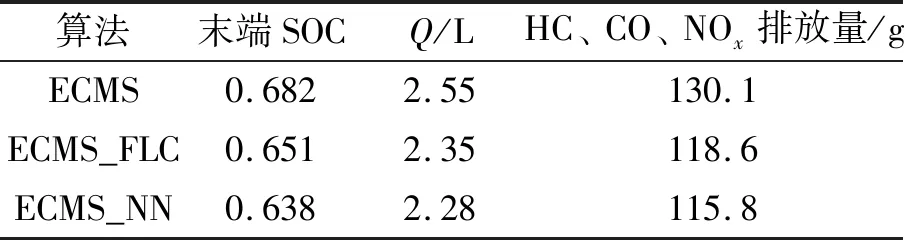
表4 3种控制策略经济性、排放性对比Tab.4 Comparison of economy and emission of three control strategies
表4为3种控制策略下燃油经济性和排放性的对比.由表4看出,融合驾驶风格的自适应控制策略的综合性能有了明显的提升,其中神经网络驾驶风格识别的自适应控制策略性能最佳,相比时间不变的ECMS控制策略,油耗(Q)降低10.5%,HC、CO、NOx总排放降低11%.
5 结语
考虑到驾驶员驾驶风格对汽车性能影响,故而将驾驶风格融入到混合动力汽车的能量管理策略中,使得制定的控制策略能够根据不同的驾驶风格做出自适应的调整,从而提升整车性能.将模糊逻辑、神经网络识别模型识别出的驾驶风格类别融合到ECMS控制策略的制定,提出融合驾驶风格的自适应ECMS,相比不考虑驾驶风格的控制策略,考虑驾驶风格影响的控制策略在燃油经济性、排放性能有显著的提升.取一段工况使用所指定的能量管理策略,仿真结果表明,融合驾驶风格识别的策略在燃油经济性方面最高提升了10.5%,汽车的HC、CO、NOx总排放最高降低了11%,发动机电机工作点更好地运行在最佳区域中.
猜你喜欢
房地产导刊(2022年4期)2022-04-19
汽车工程师(2021年12期)2022-01-17
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年15期)2021-11-05
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
汽车维护与修理(2019年3期)2019-08-08
水电站机电技术(2019年5期)2019-05-31
汽车维护与修理(2018年19期)2018-04-28