智能接触器充电与控制模块设计
2022-11-25 01:02陈坚庄杰榕许志红
福州大学学报(自然科学版) 2022年6期
陈坚,庄杰榕,许志红
(福州大学电气工程与自动化学院,福建省新能源发电与电能变换重点实验室,智能配电网装备福建省高校工程研究中心,福建 福州 350108)
0 引言
接触器传统交流激磁工作模式存在分磁环易断裂、运行过程中交流噪声大、起动过程受吸合相角影响等缺点.近年来,接触器普遍采用直流化智能控制技术解决上述缺陷[1].在此基础上衍生了相关的智能控制策略,例如:准临界电流自起动控制策略[2]、磁链外环电流内环双闭环控制策略[3-4]、同步控制策略[5]、基于RBR控制策略[6]等.这些智能控制策略有效地降低接触器的弹跳、功耗[7]、电弧,提高了接触器的性能及电能利用效率.
接触器直流化智能控制策略基于控制模块的充电环节实现,需要将输入侧的交流电经整流滤波电路转换成较为平滑的直流电压,由此会造成输入电流畸变[8],畸变电流的谐波含量丰富,倒流进网侧,导致严重的谐波污染,同时造成配电网电能利用效率、设备寿命降低和元件故障等问题[9].目前,越来越多的电力设备参照相关标准,如《电磁兼容 限值 谐波电流发射限值(设备每相输入电流≤16 A) (GB 17625.1—2012)》[10]对谐波的要求设立谐波抑制环节.智能接触器作为基础核心设备广泛应用于智能化配电网中,却鲜有考虑谐波抑制环节.
为抑制智能接触器所造成的谐波污染,提高电能质量,采用模块化思想设计接触器的充电与控制模块,该模块引入Boost型有源功率因数校正技术,主电路由Boost电路和线圈驱动电路两部分组成.对Boost电路采用电压外环电流内环控制,实现充电过程的谐波抑制;对接触器线圈采用电流滞环进行斩波控制,实现对接触器励磁状态的灵活调节.以CJ20-400A 接触器为对象进行实验,实验结果验证设计的模块能够有效地降低谐波污染,提升电能质量.
1 模块整体功能概述
设计智能接触器充电与控制模块对接触器产生的谐波电流进行抑制.采用模块化思想对其进行设计,具有设计灵活,方便查错、维护和扩展,系统利用效率高等优点.充电与控制模块根据内部功能的不同划分为主控环节、辅助电源环节、充电子模块、控制子模块,该模块结构框图如图1所示.主控环节提供3路PWM信号,控制电力电子开关管通断,实现谐波抑制和线圈电流闭环控制的目的.其外围电路包括芯片供电电路,信号调理电路等.辅助电源环节经EMI及整流滤波后输出+5、+15、±15 V等多路直流电源向其余部分供电.充电子模块以DC/DC变换器电路为基础,通过电压、电流传感器等器件,将表示电路状态的各物理参量送入主控环节中,依据预先设计的电压外环电流内环控制算法进行计算,而后输出PWM信号控制开关管通断,实现对输入电流波形的整形,从而达到谐波抑制的目的.控制子模块采用三态线圈驱动拓扑,使线圈具有3种工作状态,控制灵活,可以快速激磁/去磁.

图1 接触器充电与控制模块结构框图Fig.1 Contactor charging and control module structure block diagram
2 充电与控制模块设计
充电子模块和控制子模块是充电与控制模块的重要组成部分,分别实现谐波抑制和接触器控制的功能.该模块的主电路由Boost电路和线圈驱动电路构成.
2.1 充电子模块设计
充电子模块可对输入电流进行校正,减小谐波污染.引入APFC(有源功率因数校正)技术,采用DC/DC变换器作为充电子模块电路.但不同APFC变换器拓扑抑制效果有所不同,需对变换器的理想电压传输比进行分析[11],选出合适的变换器拓扑作为充电子模块电路,改善因传统控制方案缺少谐波抑制功能带来的谐波污染.
图2为具有PFC功能的变换器,IL为电感电流,RL为负载.假定输入电压Uin为:

(1)
输入电压Uin经整流桥UR整流可得直流侧电压Ug为:

(2)
输出电压Uo纹波很小时可视为理想直流,此时变换器电压传输比TVV为:

(3)
Ug、电压传输比TVV与时间的关系如图3所示.由图3可知,当输入电压过零点时变换器的电压传输比为无穷大.要使谐波抑制达到最佳效果,则实际电压传输比要接近理想电压传输比,但在实际电路中,输出电压并不可能达到无穷大,为使变换器电压传输比尽可能接近理想值,则要求变换器具有升压特性,故可选用具有升压特性的电路拓扑.Boost变换器对原有的接触器控制方案改动相对小,器件增加相对较少,同时具有输入电流波形脉动小、功率因数和效率较高等优点.故本研究选用Boost变换器作为充电子模块的电路拓扑.
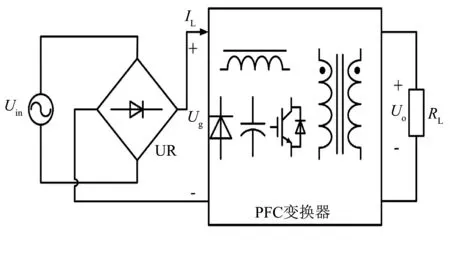
图2 具有PFC功能的变换器Fig.2 Converter with PFC function
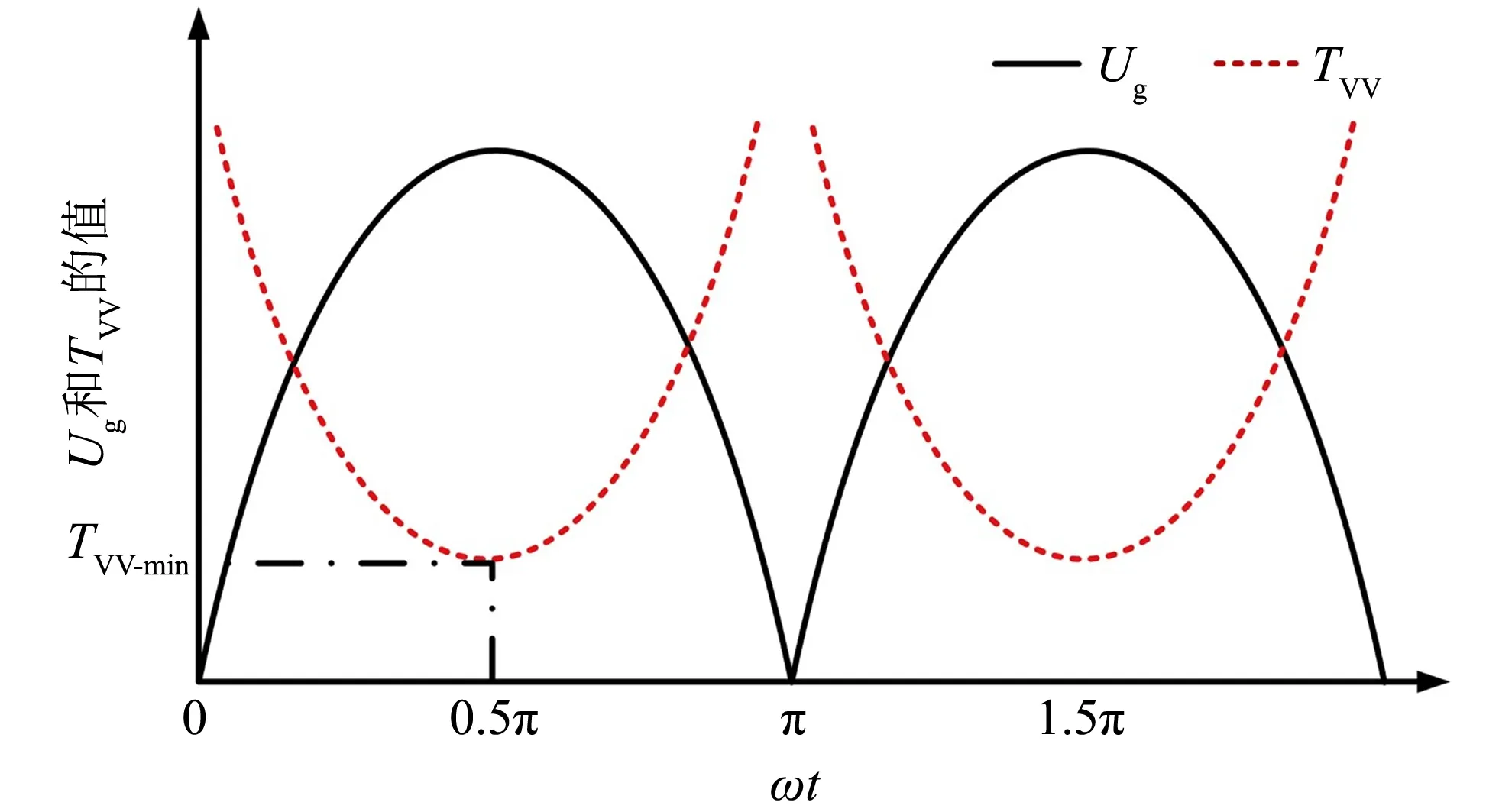
图3 Ug、TVV与时间的关系Fig.3 Relationship among Ug,TVV and time

图4 充电子模块电路拓扑图 Fig.4 Circuit topology of charging sub-module
本研究设计的充电子模块电路如图4所示.Uin为输入电压;UR为整流桥;C1为滤波电容;Ug为整流滤波后的正弦半波电压;L1为升压电感;IL为电感电流;VD1为二极管;VT1为电力电子开关管;C2为电解电容,保持变换器输出电压稳定,其两端电压为Uo.充电子模块工作过程如图5所示:当电感电流IL下降时,VT1开通,电路工作在模态1(如图5(a)所示),升压电感L1储存能量,从而增大电感电流;当电感电流IL上升时,VT1关断,电路工作在模态2(如图5(b)所示),升压电感L1释放能量,从而减小电感电流.同样地,当输出电压Uo减小时,VT1关断,升压电感L1释放能量,C2储存能量,从而令输出电压Uo上升;反之令VT1开通,升压电感L1储存能量,C2释放能量,令输出电压Uo降低.

图5 充电子模块电路工作模态Fig.5 Charging sub-module circuit operation modes
2.2 变换器参数设计
变换器参数的选择是决定谐波抑制效果好坏的关键,其可根据系统的输入、输出电压,接触器吸合所需功率及变换器工作频率fs确定.
1) 升压电感L1设计.纹波电流ΔI的大小与升压电感L1值和输入的电流电压的峰值有关.假设输入与输出功率相等,则峰值电感电流最大值为:
(4)
式中:Po为接触器吸合所需功率;Uin min为系统输入电压峰值最小值;ILp为峰值电感电流最大值.
纹波系数一般取0.2,则纹波电流为:
ΔI=0.2ILp
(5)
电路最大占空比Dmax为:
(6)
根据式

(7)
式中:IL为电感电流;Uin为系统输入电压.可得升压电感L1的值为:

(8)
其中:fs为变换器工作频率.
2) 输出电容C2设计.输出电容由接触器吸合所需功率Po、电压纹波要求,以及输出要求持续时间等共同决定,由能量守恒得:

(9)
其中:Uo max为最大输出电压,Uo min为输出电压最小值,二者之差为电压纹波;Δt为持续时间,根据工程经验一般选择15~50 ms.则可得输出电容C2的取值范围为:

(10)
2.3 控制子模块设计
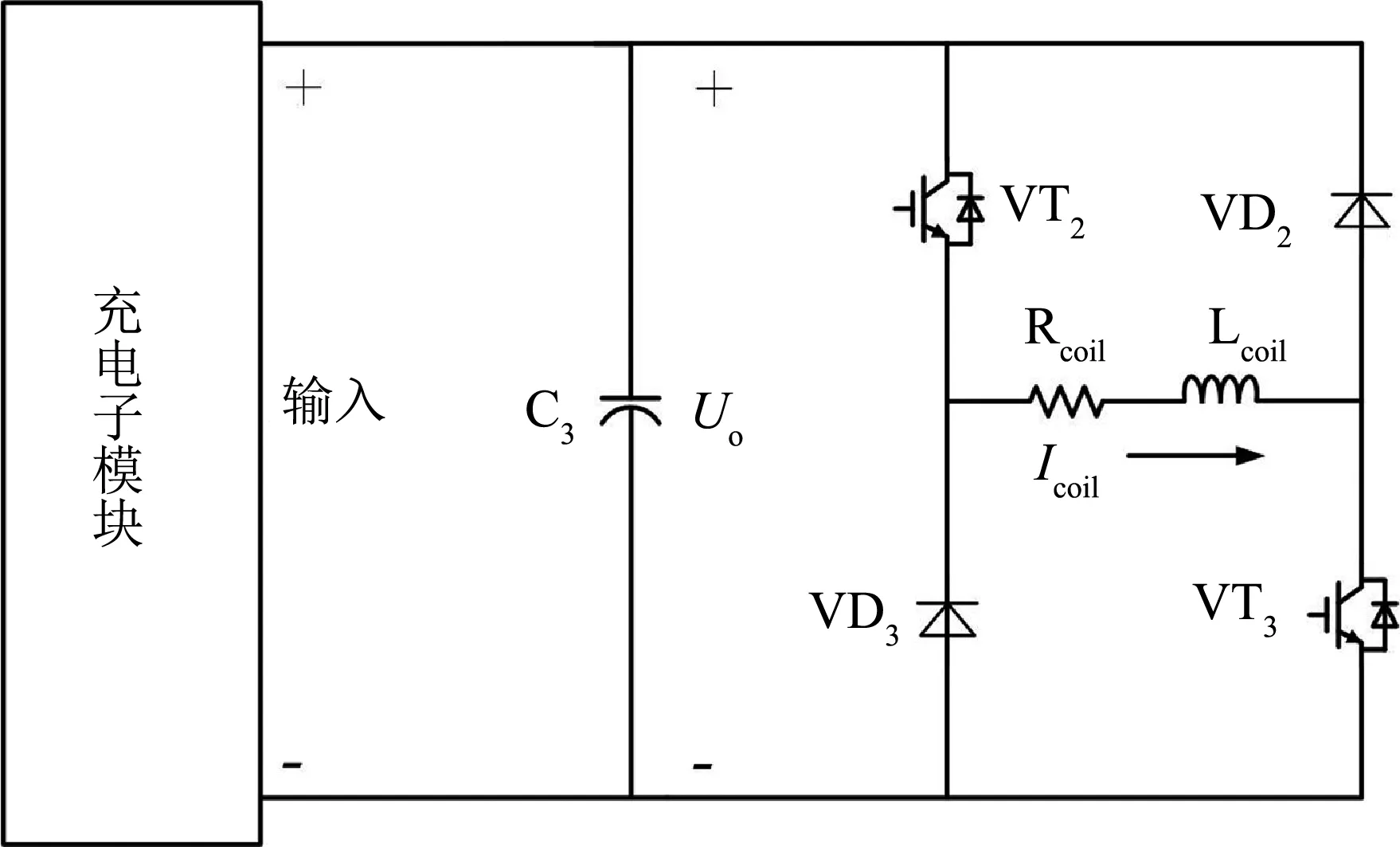
图6 线圈驱动电路Fig.6 Coil drive circuit
控制子模块以线圈驱动电路为基础,灵活的驱动电路可实现目前大多数的接触器智能控制方案,同时提高充电子模块兼容性.本研究设计的线圈驱动电路具有3种工作状态,可快速激磁/去磁,如图6所示.充电子模块输出的直流源从input端口输入;C3为电解电容;VT2、VT3为电力电子开关管;VD2、VD3为二极管;Icoil为线圈电流;以Rcoil、Lcoil表示接触器线圈,对其采用滞环电流控制.其工作过程如下:
① 当Iref>Icoil时,开关管VT2、VT3同时导通,电路处于激磁状态,如图7(a)所示.Uo直接加在线圈两端,线圈电流快速上升以跟踪参考值.此时电流流通路径为VT2、Rcoil、Lcoil、VT3.
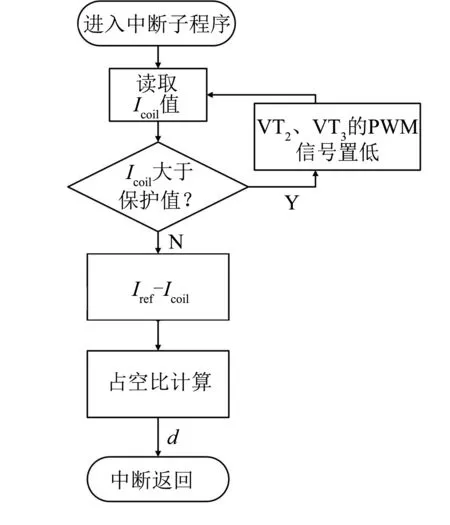
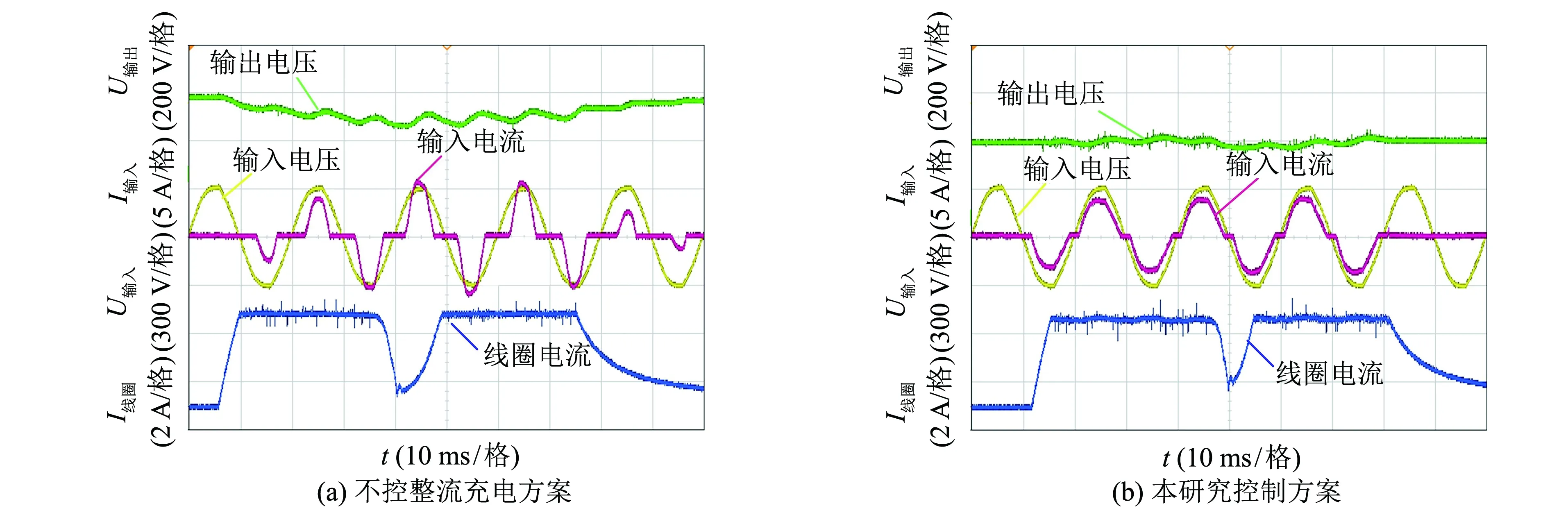
② 当Iref ③ 当Iref 图7 线圈驱动电路工作模态Fig.7 Coil drive circuit operation modes 充电与控制策略设计是实现谐波抑制和接触器控制的关键,本研究对充电子模块采用电压外环电流内环控制,抑制输入电流谐波,对控制子模块采用电流滞环控制,实现接触器稳定运行. 电流环通过对电感电流控制,可实现输入电流的正弦化,并与输入电压同相位,从而达到谐波抑制的目的.在实际运行过程中,存在外部扰动使变换器的输出电压超过限定电压造成器件的损坏,因此还应添加一个控制输出电压的电压环对输出电压进行控制.控制程序流程图如图8所示,采用电压外环电流内环控制策略对充电过程产生的谐波进行抑制,读取整流滤波后的电压、电感电流、变换器输出电压值后,若其超出电感电流或输出电压的保护值,则将控制VT1的PWM信号置低,反之则运行电压外环电流内环控制策略,而后输出占空比控制VT1通断. 在接触器实际运行过程中输入电压会产生波动,接触器线圈电感也随着气隙的变化而变化,若采用将占空比设定为某一固定值的开环控制,则无法对线圈电流进行精确控制,易造成过流风险及功率的损耗,因此应采用通过负反馈动态调节占空比的闭环控制.常见的闭环控制有:电压型、电流型PWM控制和滞环控制.滞环控制结构简单、稳定、不易因外部扰动而发生振荡,如图9线圈电流滞环控制程序流程图所示,选用滞环电流控制模式,读取线圈电流值后,若其超过线圈电流保护值则将控制VT2、VT3的PWM信号置低,反之则根据实际线圈电流与设定的电流参考值的大小关系,改变施加的占空比值. 图8 电压外环电流内环控制程序流程图Fig.8 Flow chart of voltage outer-loopcurrent inner-loop control program 图9 线圈电流滞环控制程序流程图Fig.9 Flow chart of coil current hysteresis control program 图10 实验平台Fig.10 Experimental platform 为验证所提软硬件方案的有效性,搭建如图10所示的实验平台,以CJ20-400A接触器为实验对象.升压电感L1为10 mH;输出电容C2为300 μF;接触器起动时间70 ms;接触器起动/吸持电流4 A/0.5 A;充电子模块开关频率/采样频率为40 kHz;线圈驱动电路开关频率/采样频率为20 kHz. 基于搭建的实验平台,将所提控制方案与传统的不控整流电容充电方案进行对比分析.实验结果如图11所示,工作交流电压220 V,图11(a)为传统的不控整流电容充电方案,输入电流呈现周期性的正负脉冲波形,谐波含量大,易对输入电源造成不利影响.相比之下,图11(b)为本研究所提控制方案,输入电流畸变得到显著改善,呈现正弦化.提取两种方案的输入电流谐波进行傅里叶分解,对比结果如图12所示:采用不控整流方案时输入电流的奇数次谐波大,三次谐波占基波幅值近80%.采用本研究所提控制方案后,输入电流各次谐波均得到有效抑制,奇数次谐波减小尤为明显,三次谐波降至15%左右(图12纵坐标表示谐波幅值占基波幅值的百分比). 图11 两种控制方案的对比实验波形Fig.11 Comparative experimental waveforms of the two control schemes 上述两种控制方案下的THD值与PF值对比见表1,可知相较于不控整流方案,采用本研究所提控制方案后THD与PF均得到了改善.THD由原先的80.20%降至14.53%,PF由0.78升至0.989.由本节的实验对比分析可知,采用本研究所提控制方案相比于不控整流方案可以实现更好的谐波抑制和功率因数校正效果. 图12 输入电流傅里叶分解Fig.12 Fourier decomposition of input current 表1 两种控制方案下的THD值与PF值对比 Tab.1 THD and PF values were compared under the two control schemes 由于接触器实际运行电压存在波动,因此改变工作电压,分别验证185、265 V交流电压条件下本研究所提控制方案的有效性.实验结果如图13所示,t1时刻接触器开始吸合控制阶段,通过控制开关管VT1通断,使电感电流跟踪上参考电流,实现正弦化并与输入电压同相位,最终达到谐波抑制的目的.通过控制开关管VT2、VT3的通断,使线圈电流稳定在参考值附近实现电流滞环控制;t2时刻铁心闭合;在t3时刻,切换到吸持状态.实验结果表明在不同电压等级下输入电流依旧呈现较好的正弦化. 图13 不同电压等级实验波形Fig.13 Experimental waveforms at different voltage levels 采用模块化思想设计了智能接触器充电与控制模块,充电子模块以Boost变换器为基础实行电压外环电流内环控制降低输入电流谐波、减少电网谐波污染,弥补现有方案缺少谐波抑制功能的缺点.控制子模块采用电流滞环策略,实现接触器稳定运行.实验结果表明了本研究所设计方案的有效性,为后续进一步深入研究智能接触器谐波抑制理论打下基础.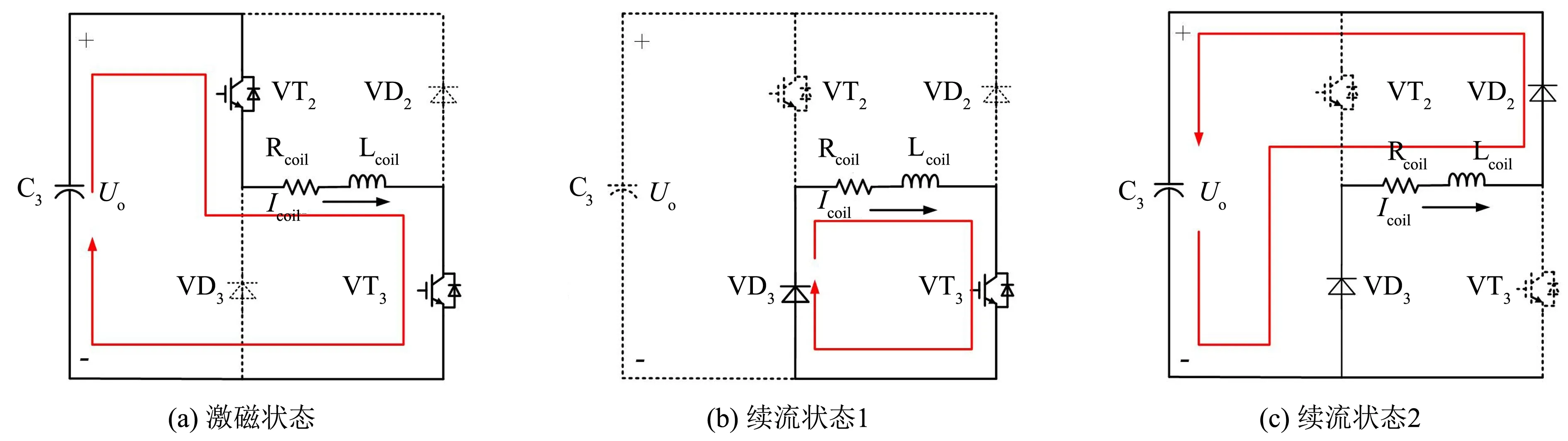
3 充电与控制策略
3.1 充电闭环策略
3.2 线圈电流闭环策略

4 实验验证与分析

4.1 控制方案实验对比分析


4.2 不同电压等级实验分析

5 结语
猜你喜欢
设备管理与维修(2022年21期)2022-12-28电机与控制应用(2022年4期)2022-06-27电子制作(2019年7期)2019-04-25电子制作(2018年18期)2018-11-14电子制作(2018年17期)2018-09-28通信电源技术(2018年5期)2018-08-23通信电源技术(2018年5期)2018-08-23通信电源技术(2018年5期)2018-08-23电子制作(2018年9期)2018-08-04电子制作(2018年13期)2018-07-27