手动变速箱自动换挡系统的设计与仿真
2022-11-24 12:47傅鹤川高吕和
北京工业职业技术学院学报 2022年4期
傅鹤川 高吕和
(1.广州工程技术职业学院,广州 510075;2.北京工业职业技术学院机电工程学院,北京 100042)
0 引言
目前有许多使用替代能源的车辆,其开发目的是替代汽油发动机的使用,如电动汽车。电动汽车应该是未来最可行的用于降低石油使用率、改善空气质量和减少排放的车辆选项。电动汽车已广泛应用于汽车工业的各个领域,如乘用车、摩托车、公共汽车甚至赛车。基于这样一个趋势,现在世界范围内的各大汽车厂商和研究机构都加大了电动汽车的投资和研发力度[1],许多研究都集中在电动汽车技术上,如电机、电动汽车传动系统和电池技术。
在电动赛车中,某些重要变量比如加速度、最高速度和效率决定了车辆的性能高低。这些变量取决于电机、蓄电池的性能,也受变速箱或传动系的性能影响。变速器其实也是决定汽车性能和特性的一个非常重要的因素,因此我们尝试研究在特定类型的电动赛车上增加变速器来增加输出扭矩变化范围,从而增强赛车的加速性能。手动变速器之所以能够被选用,是因为其能够比其他类型的变速器如行星齿轮自动变速器(AT)和无级变速器(CVT)实现更好的汽车性能[2]。尽管大多数电动汽车使用自动变速器(AT),但在电动汽车上使用手动变速器是提高其性能的一个有效解决方案,因为手动变速器比自动变速器能传输更高的机械传动效率。
在使用手动变速器的赛车中,由于驾驶员需要把一部分注意力分配给换挡过程,可能降低驾驶员对道路状况的关注,这是手动变速器的一个不足之处。因此,笔者将开发一个能够自动操作手动变速器换挡过程的系统,并称之为自动换挡手动变速器。该系统将允许驾驶员完全专注于道路,只需操作加速和制动踏板,换挡过程将由控制器自动操作。控制器的构成除自动换挡系统外,还有自动油门系统,自动油门系统用于在换挡过程中自动进行油门的控制,包括加油或减油的控制。另外,这2个系统都用模糊逻辑控制器提升性能,从而可以改善控制程序的稳定性。手动变速器自动换挡系统和自动油门系统旨在提高汽车的性能,包括加速能力、最高速度以及效率。
1 实验方法
1.1 实验设计
笔者对自动换挡系统进行了设计和仿真。系统本身内置微控制器Arduino Mega 2560,在MATLAB R2019b上用Simulink编程。Arduino是一个用于开发电子项目的开源平台,它包括物理可编程电路板和软件[3],以及可在计算机上运行的集成开发环境IDE(Integrated Development Environment)。系统程序包括带模糊逻辑控制器的自动换挡程序控制器和自动油门程序,用于自动控制换挡过程,并在换挡过程中分别自动中断和控制加速度值。应用程序模糊逻辑控制器在车辆自动化技术中的应用范围广泛,如控制混合动力汽车上的离合器和控制湿式摩擦离合器[4]。
实验中使用了一些重要的仪器,如电位计(加速器输入)、微控制器Arduino Mega 2560和可编程电路板(自定义 PCB),其中包括推入按键按钮(push)和用于显示的LED面板。实验仪器方案如图1所示。

图1 实验仪器方案
此外,Simulink也被用于实验中,以对外模式执行和显示实验结果,其对外模式为Simulink中的一种运行模式,用来允许连接到计算机的其他仪器同步模拟运行的同时显示模拟结果。换挡过程模拟结果曲线如图2所示。

图2 换挡过程模拟结果曲线图
1.2 实验程序
自动换挡系统程序有3个输入口和1个输出口。输入为加速度输入值,它使用电位计,包括比赛模式切换和效率模式切换。系统内程序产生的转速值(RPM)作为输出。加速度输入值和输出RPM值的工作有效范围为0至666 RPM。
在该程序中运行的模糊逻辑控制器有1个输入和输出,分别为加速度输入值和换挡信号。在模糊逻辑控制器内部,有1个加速度输入值参数决定何时产生换挡信号。在这个程序中有2种不同的模式,即前述的比赛模式和效率模式。这2种模式之间的差异体现在加速度输入值参数上。在比赛模式下,加速度输入值的参数设置为500 RPM;在效率模式下,加速度输入值的参数设置为300 RPM。如果比赛模式下的加速度输入值达到500 RPM,就会产生换挡信号。同样,如果效率模式下的加速度输入值达到300 RPM,也会产生换挡信号。比赛模式使用比效率模式更高的转速,从而可以获得电动赛车的最好输出性能[5]。比赛模式提供了高性能输出,不可避免就会消耗大量的电池功率。效率模式使用比比赛模式更低的RPM,从而只需要消耗电池的最小电量。
在产生换挡信号后,自动换挡程序将向换挡程序发出换挡命令来改变手动变速箱的挡位,后文中称之为升挡过程。需要说明的是,笔者使用的手动变速箱是一种摩托车手动变速箱,无离合器系统,具有4个传动比(挡位)。此外,自动换挡机构使用24 V直流电机来操纵换挡杆,且假设换挡时间为0。因为模拟过程只是在Simulink中进行程序模拟,此状态下,当换挡过程启动时自动油门程序将产生信号,用设定值降低输出转速值(RPM)。这个过程是必要的,因为变速器在升挡时电机的输出转速要有所降低,也就是要达到特定的目标转速RPM。
在加速度输入值达到其设定参数值之前,自动油门程序将读取并记忆输入加速度值的变化率,以判断换挡过程模拟驾驶员加速行为的意图。随即,这个变化率将用于自动油门程序的处理过程。自动油门程序将根据驾驶员的加速行为意图自动控制换挡过程中的电机输出RPM值。该程序的1个示例如图2所示。
在实验中,将使用2种不同的加速行为对程序进行测试,且分别对应于比赛模式和效率模式。第1种加速行为是加速度慢,表现为缓慢上升的加速输入值,在比赛模式下约为66 RPM/s,在效率模式下约为50 RPM/s。第2种加速行为是快速加速,以加速输入值的快速上升为特征,在比赛模式下约为200 RPM/s,在效率模式下约为100 RPM/s。加速度输入值将通过手动操作电位计来实现,同时自动换挡程序的响应将在输出RPM值中得以体现。
2 数学建模
2.1 模糊逻辑控制器
笔者使用的模糊逻辑是基于使用Mamdani推理的SISO(单输入单输出Single Input Single Output)模糊系统。Mamdani推理的表达式简单,可进行大量计算,并具有结果直观的特性。Mamdani的类型推断期望输出成员函数模糊集。在聚合过程之后,会出现1个需要解模糊的输出变量模糊集[6]。笔者应用的模糊推理使用梯形输入隶属度函数和单例输出成员函数。模糊化方程对模糊推理在比赛模式和效率模式中的应用都可以用式(1)表示:

式(1)中,对于比赛模式,a取 480,b取 500;对于效率模式,a取280,b取300。对于模糊集的规则评估,采用最小-最大法,然后给出模糊输出。采用质心法解模糊方程对比赛模式和效率模式进行模糊推理,可表示为式(2):

式(2)中,O是换挡信号的输出值,模糊输出通过规则评估获得。
2.2 换挡过程中的目标转速
前文已经提到了换挡过程中使用的目标转速。RPM目标转速可以根据变速箱的挡位传动比来计算。笔者使用具有4个挡位(传动比)的手动变速箱,具体数据说明如表1所示。
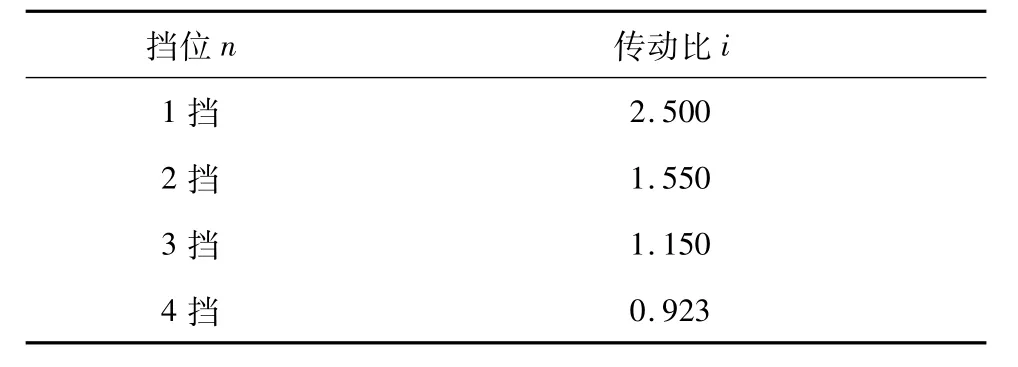
表1 手动变速箱挡位及传动比
可通过输入转速和传动比来计算确定目标转速,计算方程如式(3)所示:

式(3)中,比赛模式的 RPM设定参数取500;效率模式的RPM设定参数取300;(n-1)是换挡过程发生前的挡位数;(n)是换挡完成后的挡位数,(n)的值为2,3和4。根据式(3),2种模式下的每个挡位需要的目标转速可按表2中的数据确定,除此以外的其他情况下,转速的目标值由模糊逻辑计算确定。对于采用可变挡位的手动变速箱来说,要想获得正确且平稳换挡的过程,目标转速降低的处理程序是必不可少的[7]。

表2 每个模式和挡位下的目标转速
2.3 自动油门程序中的代数循环
自动油门程序使用代数循环创建具有特定变化率的独立信号,并将其用作自动加速度值。在Simulink模型中,当信号回路存在并且回路内只有直接馈通块的时候代数循环就会产生。直接馈通意味着块输出取决于输入端口的值;输入值直接控制输出值。代数循环很难用数学方法求解。为了在Simulink内解决这个问题,代数循环必须添加1个小延迟或添加内存块,如图3所示。通过求解代数循环,它将生成线性的输出图形,并且其变化率为1。

图3 模拟代数循环
3 结果与讨论
3.1 比赛模式模拟
Simulink中的模拟是在比赛模式切换打开的情况下完成的。此时转速参数设置为500 RPM。然后,对2种不同的加速行为进行了仿真,分别为加速度具有快速上升变化率的输入值(约200 RPM/s)和加速度具有慢速上升变化率的输入值(约66 RPM/s)。此两种状态的结果模拟如图4所示。

图4 比赛模式下的换挡过程模拟结果
图4 显示自动换挡程序的模拟已成功进行。从图4可以看到换挡过程,通过对于具有快速上升变化率和慢速上升变化率2种状态的模拟,可以清楚表明,从1挡到4挡的每次换挡的换挡时点转速都是500 RPM。此外,如图4中的输出转速值曲线所示,自动油门器程序在该模拟中同样也获得成功,它表明输出RPM值根据设定值降低了,以便在换挡过程完成后获得RPM目标值。比赛模式下无论是快速上升变化率状态还是慢速上升变化率状态都具有相同的RPM目标值,如表2所示。而且,自动油门程序能够精确读取并记忆 “加速行为” 或加速度输入值的变化率,然后使用该参数在不需要人工干涉油门的情况下自动改变加油量。该加油量的自动改变值在从1挡切换至4挡的过程中重复执行,达到4挡后,自动加速加油量持续增加,直到与加速度输入值相同。总体状态下,比赛模式模拟结果表明,自动换挡和自动油门程序对于不同的 “加速行为” 或加速度输入的变化率(无论是快速上升变化率还是慢速上升变化率)都能正常工作。
3.2 效率模式模拟
在Simulink中进行的本项模拟是在启用效率模式切换的情况下完成的,其中转速参数设置为300 RPM。然后,对2种不同的加速行为进行仿真,包括具有快速上升变化率的加速度输入值(约100 RPM/s)和具有慢速上升变化率的加速度输入值RPM(约50 RPM/s)。2种变化率的模拟结果如图5所示。

图5 效率模式下的换挡过程模拟结果
显而易见,效率模式下的模拟结果,很大程度上与比赛模式下的模拟结果相同。自动换挡工作正常,通过对于具有快速上升变化率和慢速上升变化率2种状态的模拟,可以清楚表明,从1挡到4挡的每次换挡的换挡时点转速都是300 RPM,达到4挡后,自动加速加油量持续增加,直到与加速度输入值相同。由于RPM参数处于效率模式下,自动加速值上升所需要的时间比比赛模式下要长,才能达到与比赛模式下相同的加速度输入值。此外,图5显示输出RPM值是根据设定参数降低,从而在换挡过程完成后,获得RPM目标值。
4 结论
笔者的设想以上述实验方法实施验证,通过构建自动换挡和自动油门控制程序,实现了对手动变速箱的自动控制。在仿真实验中,比赛模式和效率模式的仿真结果都表明,自动换挡和自动油门程序在比赛模式和效率模式都可有效工作,而且不仅如此,即便加速度输入有复杂变化也可有效工作。自动换挡程序能够在1挡到4挡之间完美切换挡位,并与转速参数为500 RPM的比赛模式和300 RPM的效率模式相匹配;自动油门程序能够按照特定值降低功率输出转速值,从而使得换挡过程正确、平稳。
猜你喜欢
湖南电力(2021年4期)2021-11-05
岷峨诗稿(2020年4期)2020-11-18
初中生世界·九年级(2020年9期)2020-09-21
摄影之友(影像视觉)(2019年3期)2019-03-30
汽车电器(2018年8期)2018-08-25
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
火力与指挥控制(2016年8期)2016-09-21
汽车之友(2016年10期)2016-05-16