履带式钻锚机器人行驶速度控制系统建模与仿真
2022-11-24 12:47李雪艳袁海文
北京工业职业技术学院学报 2022年4期
李雪艳 焦 峰 袁海文
(1.北京工业职业技术学院机电工程学院,北京 100042;2.中国矿业大学(北京),北京 100083;3.北京航空航天大学,北京 100191)
0 引言
钻锚机器人又称锚杆钻车,是在巷道锚杆支护工作中的一种钻孔锚固设备,其在加固巷道、提高成巷效率、减轻矿工劳动强度等方面发挥着极为重要的作用。在钻锚机器人行驶过程中,由于履带本身存在着滑移或者滑转原因,会导致调节器速度与实际行驶速度不一致。此外,钻锚机器人行驶的路面情况改变,比如路面的岩石、凹凸不平的道路也会导致两者速度不一致。因此,针对以上问题,通过研究速度控制方法使钻锚机器人实际行驶速度始终按照调节器速度行驶,实现对行驶速度更加快速精确控制,在行驶过程中使钻锚机器人到达指定钻锚位置。该速度控制方法的研究能够为钻锚机器人自主或遥控行走控制系统的研究提供理论和应用基础,在其他履带车辆中也具有一定的实际应用价值和参考意义。
1 速度控制系统介绍
研究钻锚机器人速度控制技术,主要是通过对钻锚机器人行驶速度的控制,使钻锚机器人按照速度调节器给定的速度行驶,进而实现对钻锚机器人两侧履带行驶速度控制。目前有不少研究人员对履带式车辆速度控制技术进行研究,达到使其速度响应更加快速和精确的目的,其总技术路线图如图1所示。

图1 总技术路线图
钻锚机器人要完成行驶速度控制任务,首先要对钻锚机器人实际行走速度测量,其次在钻锚机器人行驶时,通过速度调节器控制两侧履带的行驶速度,此时需要求出钻锚机器人实际行驶速度与速度调节器之间的差值。最后将此偏差数据传输给速度控制系统,控制系统经过算法处理后得到最优控制,输出控制信号给驱动器,进而调整两侧履带驱动轮转速[1-2],使钻锚机器人行驶速度始终根据调节速度行驶,实现行驶速度和转向角度的控制,其速度控制流程图如图2所示。
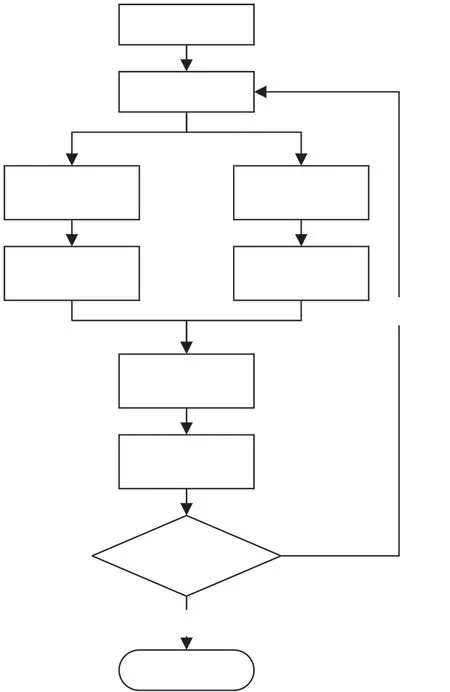
图2 速度控制流程图
在速度控制算法应用中,应用最广泛的是PID控制,其在控制稳定性、准确性和快速性方面都具有很大优势。但是钻锚机器人实际行驶时呈非线性系统特性,PID控制器在非线性系统中存在抗干扰性差、跟踪速度慢等缺点[3],笔者设计采用超调量更小、调节更快、动态响应特性更好的模糊PID控制器作为速度控制器。
2 行驶速度控制方法
2.1 PID控制
在速度反馈控制技术中,PID控制原理是按被控对象实时数据采集的信息与给定值比较产生误差的比例、积分和微分进行控制的控制系统,其PID控制结构图如图3所示。
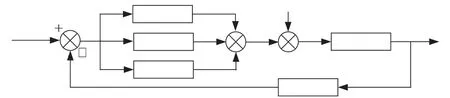
图3 PID控制结构图
在PID控制中,输出值与偏差之间的数学表达式一般可写为

式(1)中,KP为比例系数;KI为积分系数;KD为微分系数;u(t)为控制信号;e(t)为偏差。
PID控制器输入偏差经式(1)计算后,得到被控对象的控制信号,只要选定合适的比例、积分、微分系数,则控制信号能使被控系统向误差减小的方向动作,从而达到理想的控制效果。但PID控制也存在着局限性,由于3个系数的取值局限在一定范围内,当系统是时变非线性系统时,对系统的调节控制性能就会减弱,甚至变得不稳定。
2.2 模糊PID控制
模糊PID控制原理是利用模糊语言规则和模糊逻辑计算出P,I,D这3个控制参数,使用这3个参数进行PID控制,其特点是不需要构建精确的数学模型就可达到精确控制的效果,模糊自适应PID控制结构如图4所示。
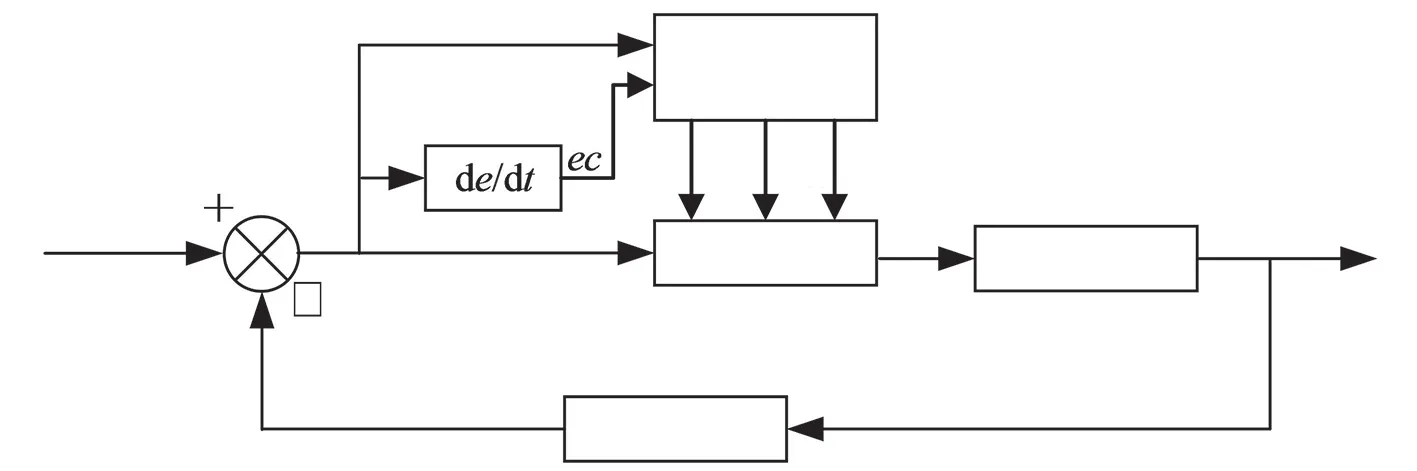
图4 模糊自适应PID控制结构
由于钻锚机器人履带行驶驱动系统是一个复杂非线性时变系统,当系统内部参数发生变化或受到外界复杂干扰时,PID控制的控制效果不明显,KP,KI,KD这3个系数需要进行不断修正才能取得较好的控制最优取值。针对履带速度控制系统采用二维模糊PID控制,其整体思想是实际数据经过模糊化、去模糊化转换,利用模糊规则构建模糊推理机制完成控制调节,其具体步骤如下[4]。
(1)确定输入和输出变量。根据履带行驶速度控制需求选取速度调节器与实际行驶速度之间的偏差e和偏差对时间的变化率ec作为输入变量,PID控制调整量KP,KI和KD作为模糊处理的输出变量。
(2)变量的模糊化。对输入和输出的变量进行模糊化,将其模糊论域分为7个子集,即 e,ec,KP,KI,KD={NB,NM,NS,ZO,PS,PM,PB},分别代表{负大,负中,负小,零,正小,正中,正大}。根据系统变化特点,其中输入的边界NB与PB使用高斯隶属度函数,其余的每个模糊论域子集形状均为三角形隶属度函数。
(3)建立模糊控制规则。模糊控制规则,即比例系数KP,是根据实际经验得到的,建立变量模糊规则库,对KP,KI和KD3个系数进行调整。在制定KP,KI和KD的规则时应遵循以下规律:当调节器速度与实际行驶速度偏差过大时,需要加快响应速度,应选取较大KP和较小KD,并适当选取KI以降低超调量;当偏差中等时,需要兼顾响应速度和超调量,应选取较小KP和适当的KI,KD;当偏差较小时,需要选取较大KP,KI保持系统稳定性,并适当选取KD以增强系统抗干扰性能。根据以上规律,结合实际数模糊规则表,实现模糊推理,其中模糊控制规则KP与输入变量之间的曲面关系图如图5所示。

图5 KP模糊控制规则曲面图
(4)解模糊。解模糊是通过特定方法对模糊化后的结果求出具体的数值,常用的方法有重心法、最大隶属度法和加权平均法。本次使用重心法求解出模糊后的具体数值,通过测量偏差和偏差变化率数值经求解后得到PID控制参数KP,KI,KD。
2.3 速度控制传递函数建立
由于行驶路面不平整或履带存在着滑移和滑转问题,往往在实际行驶过程中实际行驶速度未到达调节器所要求的速度[5]。为使钻锚机器人能够到达指定速度,需要通过控制器调节左右履带转速,这一控制过程需要根据速度控制过程设计传递函数[6],钻锚机器人速度反馈控制流程图如图6所示。

图6 速度反馈控制流程图
钻锚机器人行驶控制系统主要是由阀控液压马达来进行控制[7],其速度计算关系式为

式(2)中,v为钻锚机器人行驶速度;d为履带驱动轮直径;q为液压马达排量;Q为比例阀流量;i为减速器减速比。
液压马达的比例阀流量Q是由输入电压U决定的,根据阀控液压马达的控制原理[8],其两者映射关系式为

式(3)中,k为比例阀流量Q与输入电压U的比例系数;m为修正量。
可采用数据拟合方法计算比例系数k和修正量m,进而得到比例阀流量与输入电压两者之间对应关系,这一环节的传递函数可表示为

根据控制系统各个环节的关系,最终可得到系统的传递函数

式(5)中,t为延迟时间。
3 仿真结果分析
在钻锚机器人速度跟踪控制中,考虑到两侧履带速度控制是时变非线性的系统,使用模糊PID更易于处理该类系统控制问题。为检验其有效性,对模糊PID控制器和PID控制器的速度控制进行仿真对比。根据已有的速度传递函数,本次采用MATLAB/Simulink平台进行仿真分析,分别使用PID和模糊PID搭建控制框图,如图7所示。
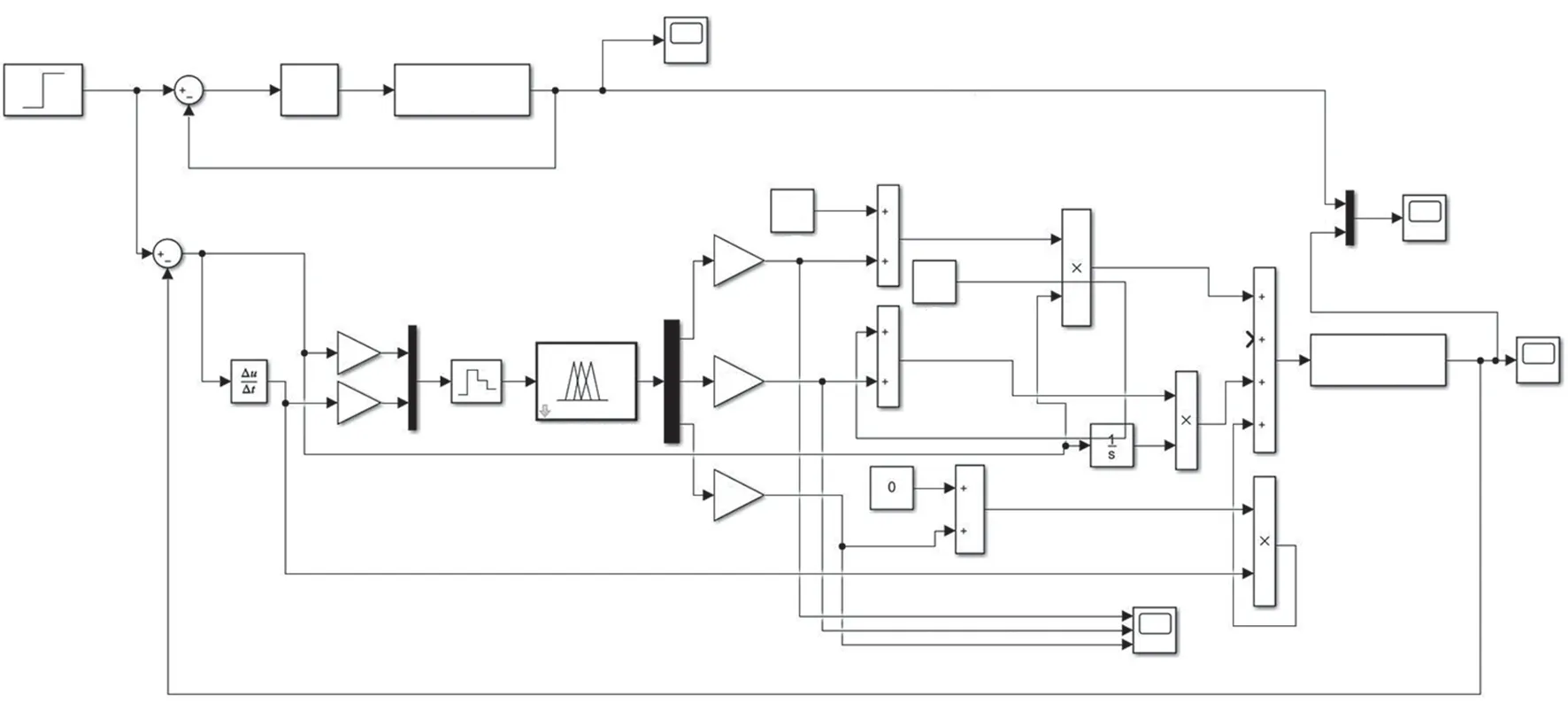
图7 MATLAB/Simulink仿真框图搭建
为验证PID和模糊PID这2种控制算法对速度控制的效果,以某一跟踪速度为例,在时域中表现其响应速度,横向坐标代表时间,纵向坐标代表马达转速。在阶跃信号输入作用下,2种控制算法时间响应曲线最后对比如图8所示。
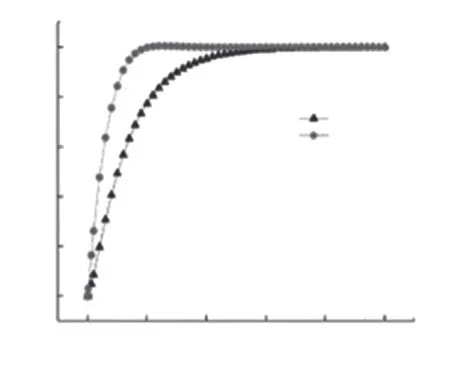
图8 2种速度控制算法时间响应曲线图
经过仿真后,由图8可以看出,模糊PID速度控制方法在响应速度和稳定性方面更为显著。PID控制器虽然能达到精确控制的效果,但是调整速度较慢,由此可得出模糊PID控制速度控制更适用于钻锚机器人行驶速度控制系统,可使钻锚机器人在规定时间内准确、可靠、准时地按照调节速度进行行驶。
4 结论
笔者针对履带式钻锚机器人在行驶过程中速度控制效果差的问题,对履带钻锚机器人行驶速度控制原理与过程进行了分析;介绍了PID控制技术和模糊PID控制技术,并利用MATLAB/Simulink仿真平台对速度控制效果进行对比仿真。仿真结果表明:在同一跟踪速度下,模糊PID控制方法控制精度比PID控制响应速度更快,系统稳定性能更好,具有一定的抗干扰能力。笔者对钻锚机器人行驶速度控制技术进行的研究,可为研究人员设计钻锚机器人行驶速度控制系统提供参考依据。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
兵器装备工程学报(2021年3期)2021-04-09
现代装饰(2020年7期)2020-07-27
宇航计测技术(2018年3期)2018-09-08
商(2016年28期)2016-10-27
汽车与新动力(2015年1期)2015-02-27
科技视界(2014年6期)2014-12-24
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年2期)2014-02-27
坦克装甲车辆(2000年6期)2000-06-13