
面向爬楼梯场景的仿人步态机器人机构设计与行走功能试验研究
2022-11-23 02:08胡青春方展杰肖舜仁陈兴彬张平
机床与液压 2022年21期
胡青春,方展杰,肖舜仁,陈兴彬,张平
(1.华南理工大学机械与汽车工程学院,广东广州 510641;2.广东省生产力促进中心,广东广州 510075;3.华南理工大学计算机科学与工程学院,广东广州 510641)
0 前言
目前爬楼机器人有多种类型,它们在功能与实用性上各有优劣。履带式爬楼机器人重心变化幅度较小、稳定性较好、控制系统比较简单,但体积大、质量大、转向难、容易对楼梯造成损害[1-3]。轨道式爬楼梯机器人稳定性好、运行速度比较均匀,但无法脱离轨道运行。轮腿式爬楼梯机器人、解耦式机器人对于不同尺寸的台阶具有较强的适应性,但其控制难度较高、操作繁琐、成本较高[4-8]。曲柄摇杆式机器人、行星轮式机器人和变径轮式机器人控制比较简单,但运动过程重心波动较大,应用场景有限[9-13]。关节机器人、两轮移动机器人体积小、质量轻、地形适应性强,但负载能力较低[14-15]。上述装置在适应居家康养爬梯场景时存在步态平稳性、升降可靠性等问题。
本文作者提出一种新型的仿人爬楼梯步态运动方式的机器人,如图1所示。该机器人能够模拟人爬楼梯的步态,将上下楼梯的运动沿水平方向和竖直方向分解,分别控制2个方向的运动,呈现出阶梯形状的运动轨迹,具有结构设计紧凑、体积较小、运动灵活性高、适应性强等特点,能在空间较小的楼梯上运动。

图1 爬楼梯机器人示意
1 机构设计
人在爬楼梯时,需要抬腿及向前迈出,以此完成攀爬动作,下楼梯时则相反,这时可将上下楼梯的运动比拟水平和竖直2个方向分运动的结合,从而可设计2种执行机构——平移机构和升降机构,实现模拟人爬楼梯步态的机器人。通过驱动电机对2个机构的爬升与平移运动进行逻辑配合控制,共同实现上、下楼梯动作。
(1)平移机构。如图2所示,电机通过带传动和螺旋传动驱使上支撑板在水平方向上平动。
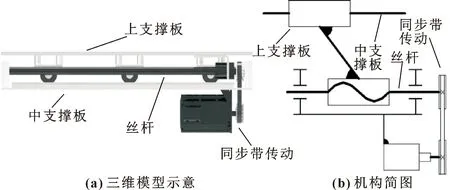
图2 平移机构
(2)升降机构。如图3所示,电机通过带传动和螺旋传动驱使双剪叉形结构上支部分的驱动端平动,上支部分两端之间的距离发生改变,使整个机器的高度变化。当双剪叉形结构上支部分两端之间的距离增大时,机器高度降低,反之则高度上升。
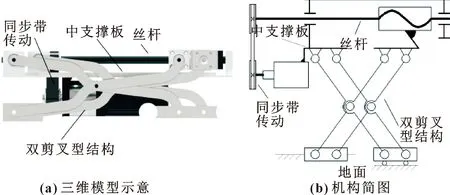
图3 升降机构
为减少杆所承受的支撑力,将双剪叉结构的一侧设计成4根杆支撑,能有效降低发生零件失效的概率。同时,双剪叉结构可分解为2个平行四杆机构,使双剪叉结构下支部分的支撑杆时刻保持水平,增强机器人的稳定性。
2 运动原理与分析
2.1 运动原理
当机器人处于上下楼梯模式时,其动作过程如图4所示。该运动过程可分解成4个部分:(1)升降驱动电机带动双剪叉形结构展开,驱使机器升起;(2)平移驱动电机带动上支撑板向前平动,同时麦克纳姆轮转动;(3)升降驱动电机反向转动,双剪叉形结构复位;(4)平移驱动电机反向转动,带动中支撑板复位。循环往复上述动作,即可实现连续爬升楼梯。当需要下楼梯时,只需反向驱动上述动作即可。
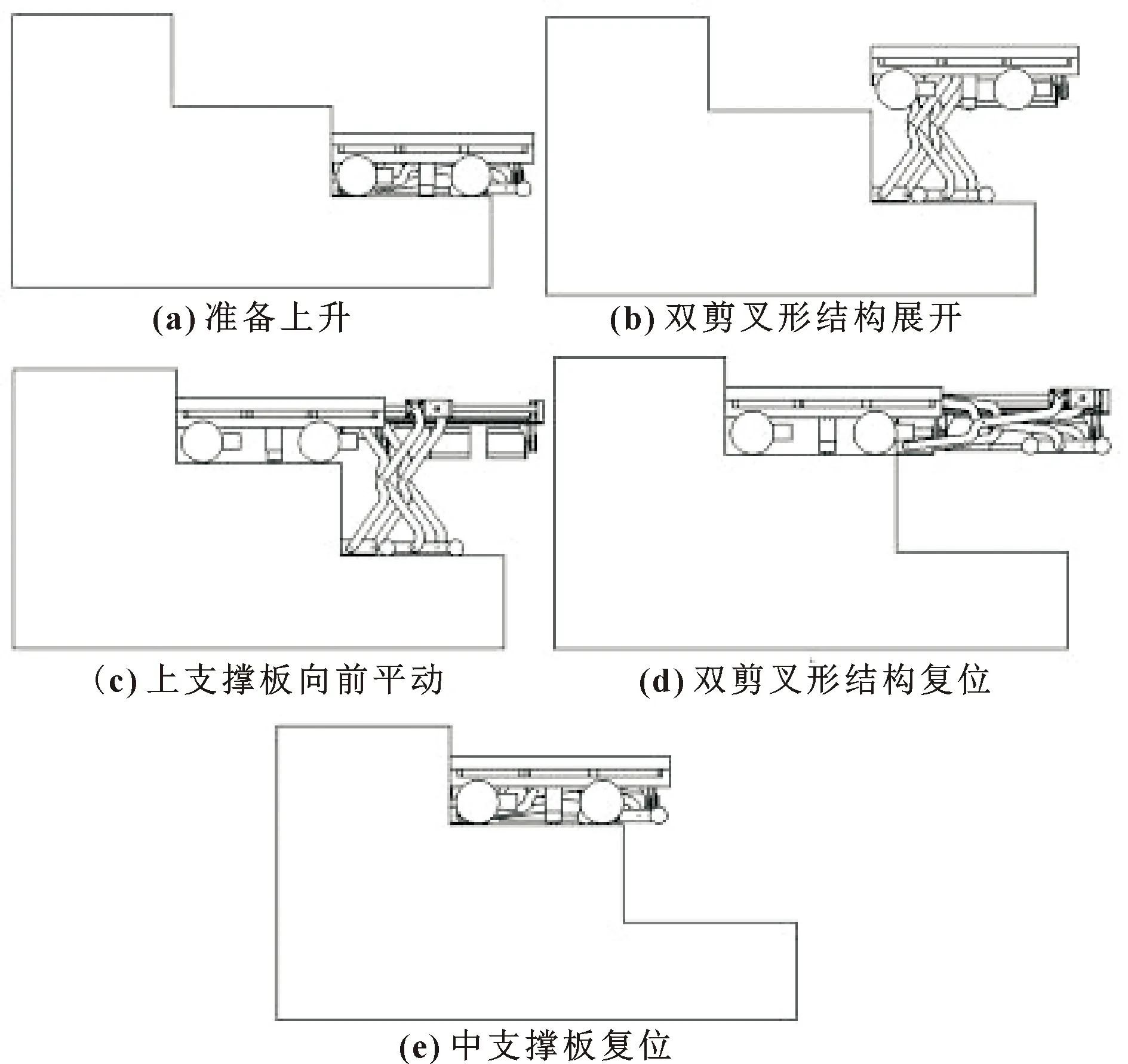
图4 机器人上楼梯运动过程
2.2 平移机构的运动分析
设平移丝杆的螺距为pp、带传动的传动比为ip、电机转速为np,平移机构中的上支撑板在运动过程中可认为是匀速,可得速度公式为
(1)
2.3 升降机构的运动分析
如图5所示,取双剪叉结构的一根杆进行运动分解,假设杆AB与水平面之间的角度为θ,杆AB两铰链之间的长度为l,当点A固定不动时,杆AB绕点A做圆周运动。当点B的速度为vj,则其水平方向和竖直方向的分速度分别为vjx和vjy,即:

图5 剪叉运动分析
(2)
(3)
由式(2)(3)可得:
(4)
解微分方程可得:
(5)
其中:θ∈(0,π/2);C为常数。假设升降丝杆的螺距为pj,带传动的传动比为ij,驱动电机的转速为nj,则水平方向分速度为
(6)
由式(2)(5)(6)可得机器的上升速度为
(7)
下降速度的分析与上述类似。
3 受力分析
3.1 平移机构受力分析
以上支撑板为对象进行平移机构的受力分析,如图6所示。设平移速度为vp、负重为m0g;与上支撑板固连的滑轮受到的力为Fpni(i=1~6,滑轮共6个,由于机器的中轴线对称布置,图中只标示出轴线一侧);滑轮所受到的摩擦力为fpi(i=1~6,同样也只标示出一侧),静摩擦因数为μp;对于螺旋副,丝杆对上支撑板(上支撑板和传动螺母可看作同一物体)在水平方向的推力为Fp7,方向与速度方向相同,在竖直方向的支撑力为Fpn7。

图6 平移机构受力分析
当平移机构静止或驱动电机匀速转动时,上支撑板处于平衡状态,此时,力平衡方程为
(8)
其中,Fpnm与fpm的关系为
fpm≤Fpnm·μpm=1,2,3,4,5,6
(9)
平移丝杆所需的驱动转矩为
Mp=Mp1+Mp2+Mp3
(10)
其中:Mp1为螺纹摩擦力矩;Mp2为螺旋传动轴向支撑面摩擦力矩;Mp3为螺旋传动径向轴承摩擦力矩。Mp1公式为

设平移丝杆的螺距为pp、带传动的传动比为ip、效率为ηp、电机转速为np,结合式(8)—(10),得出电机的输出力矩为
(11)
(12)
当Fpn7=0时,Tp最大,这时的转矩和功率可作为电机选型的参考。
3.2 升降机构的受力分析
当驱动电机匀速转动时,设双剪叉形结构上支部分右侧驱动端水平方向的速度为vjx,且水平方向的运动为匀速,竖直方向的速度为vjy,如图7所示。
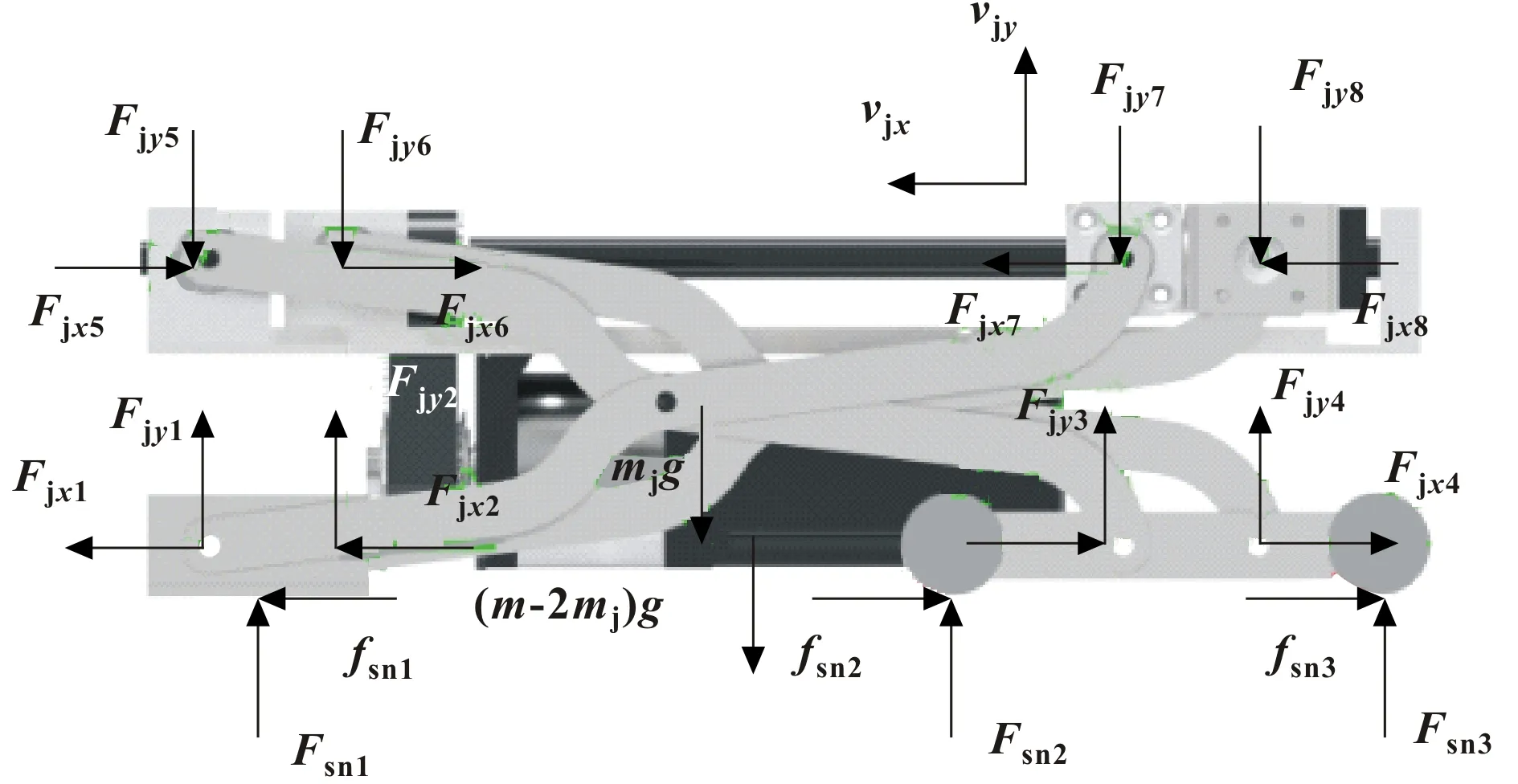
图7 升降机构受力分析

(13)
分别以双剪叉结构下支部分左右侧支撑板为对象,由静力平衡可得:
(14)
(15)
以忽略双剪叉结构的机器为研究对象,其竖直方向速度为vjy,设升降丝杆所受到的轴向载荷为Fs,假定两侧升降机构均匀受力,由质心运动定理可得:
(16)
以双剪叉结构上支部分右侧的驱动端作为研究对象,由质心运动定理可得:
Fs=Fjx7+Fjx8
(17)
假定双剪叉结构均匀受力,即:
Fsn1=Fsn2+Fsn3
(18)
结合式(13)—(18),可得:
(19)
如图8、图9所示,取一对剪叉进行分析,则两个零件的平面运动微分方程为
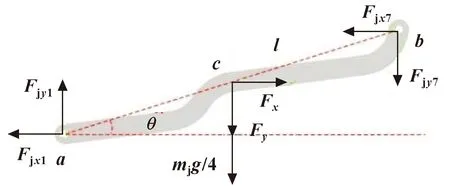
图8 右剪叉受力分析
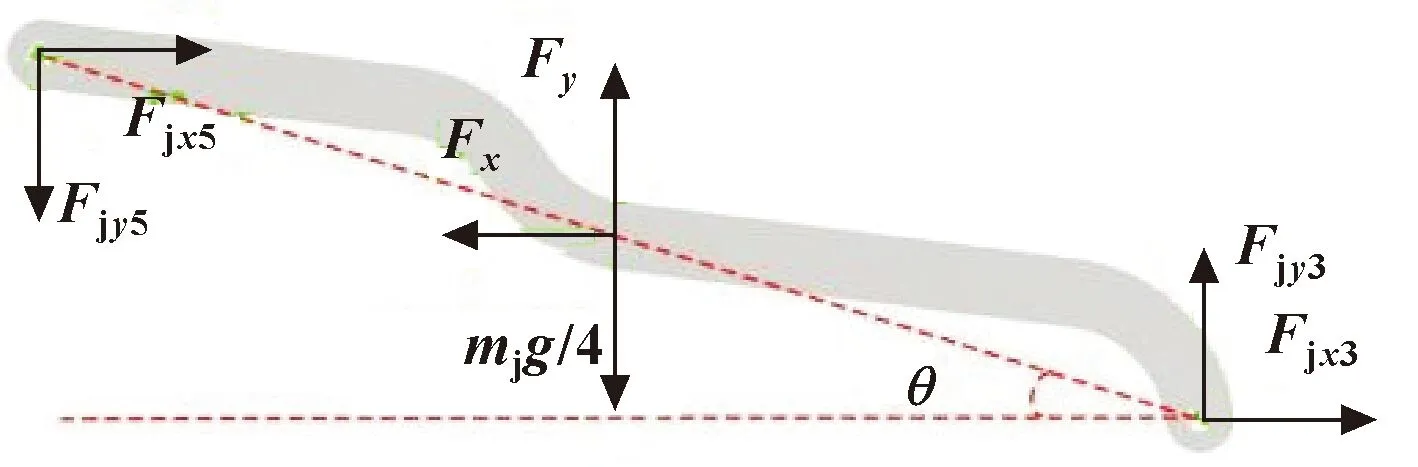
图9 左剪叉受力分析
(20)
(21)
结合式(20)(21)可以解出Fjx5、Fjx7、Fjy5、Fjy7,同理也可解出Fjx6、Fjx8、Fjy6、Fjy8,又设μs为静摩擦因数,即可得到Fs为
Fs=Fjx5+Fjx6≤
(22)
根据式(10)—(12)可计算得到电机的转矩和功率。根据零件的结构特征,当θ取最小值时,可反推出所需要电机的最大转矩,以作选型参考。
4 基于ADAMS的动力学仿真
在ADAMS软件中建立爬楼梯机器人虚拟样机和楼梯场景,如图10所示。

图10 ADAMS虚拟样机与场景
4.1 爬楼梯机器人运动可行性验证
选取立面高160 mm、平面长300 mm的楼梯场景,对仿人机器人进行爬楼梯运动可行性的仿真验证,其模拟过程如图11所示。仿真结果表明机器人可以平稳地完成爬升台阶的动作。

图11 楼梯场景下的可行性仿真
4.2 爬楼梯机器人的运动特性
在ADAMS中对在不同的电机转速下爬升楼梯的机器人进行对比仿真试验。设定电机分别以1 500、2 000、3 000 r/min的输出转速进行运动,仿真步长为0.001,设定机器人爬升一级台阶,结果分别如图12、13、14、15所示。

图12 上支撑板的竖直方向速度曲线 图13 上支撑板的水平方向速度曲线
由图12、13可知:上支撑板在竖直方向和水平方向的速度与驱动电机速度成正比。在机器人升起过程中(图11(a)—(b)),上支撑板在竖直方向上的速度随时间逐渐减小,与第2节推导的速度模型吻合;而在机器人前进过程中(图11(b)—(c)),上支撑板在水平方向上的速度保持恒定。
由图14可得:在机器人升起过程中(图11(a)—(b)),升降驱动电机的转矩随着时间的增加而逐渐减小,与第3节推导的力学模型中,转矩随θ角的增大而逐渐减小的规律相吻合。随着升降驱动电机转速的提高,所需转矩减小,但减小幅度不大,说明选取的电机只需满足最小设定转速的要求即可。

图14 升降驱动电机转矩曲线 图15 水平驱动电机转矩曲线
由图15可知:在上支撑板向前平动的过程中(图11(b)—(c)),电机转矩基本保持不变;转速对水平驱动电机所需转矩影响不大;中支撑板复位过程(图11(d)—(e))所需转矩大约是上支撑板向前平动过程所需转矩的1/2。
运动仿真证实了爬梯过程比较平稳可靠,具备对其机构实行进一步优化设计的运动学条件。
5 样机试验验证
为充分验证爬楼梯机器人功能设计的可行性,搭建试验样机,并布置在立面高160 mm、平面长300 mm的楼梯上进行试验。控制电机分别以1 500、2 000、3 000 r/min的输出转速进行运动,验证试验过程如图16所示。机器人爬升一级台阶所需要时间如表1所示。试验数据表明:机器人实际爬楼梯时间与仿真所得时间基本一致,结构功能设计与运动控制具备可行性,在运动过程中也能保持稳定。但当电机以最高转速3 000 r/min驱动时,爬升一级台阶的时间为3 s,几乎接近仿人的速度。
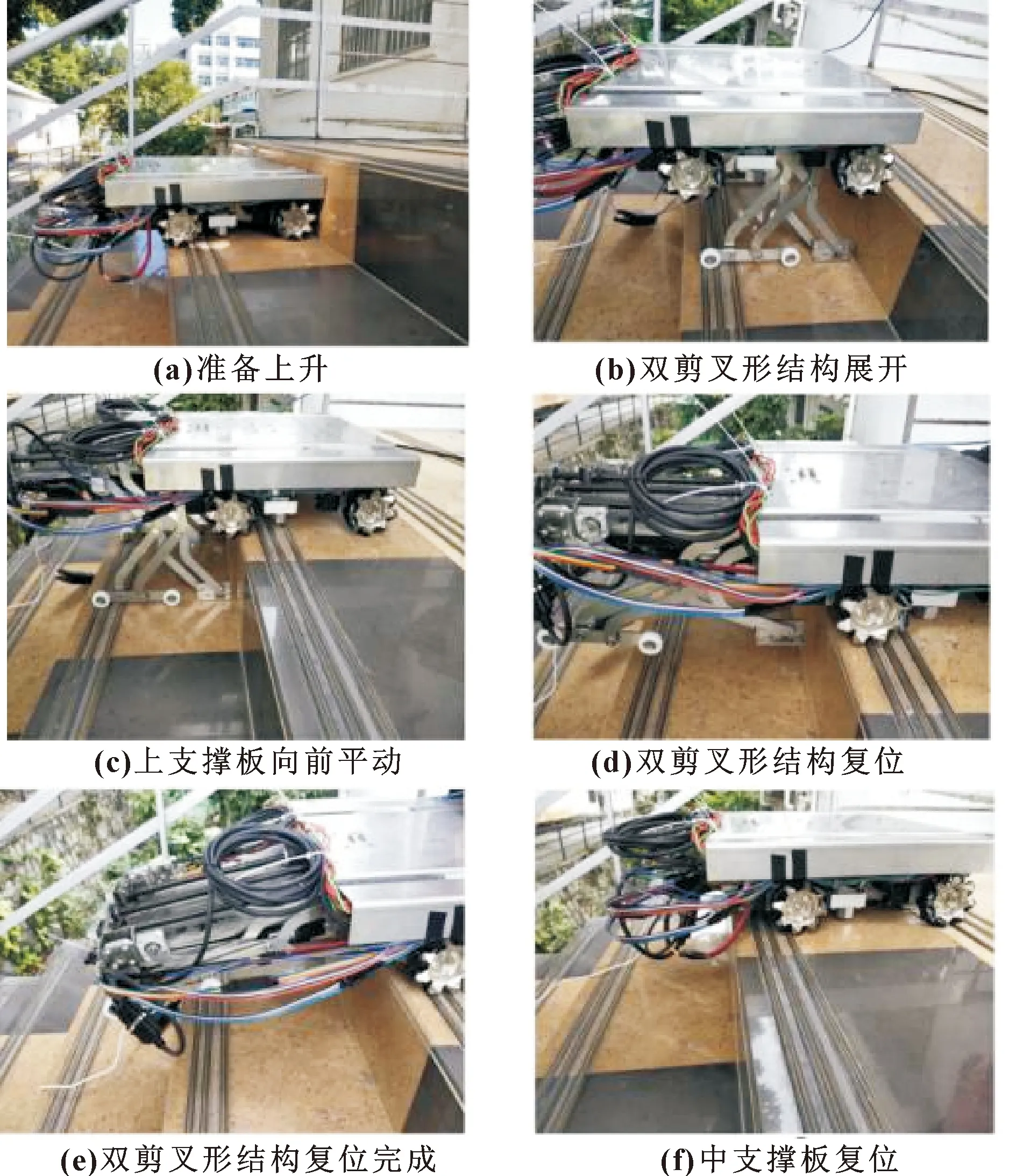
图16 机器人爬升楼梯运动过程
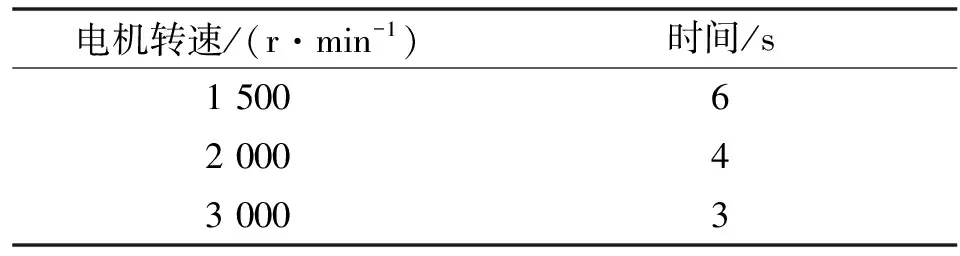
表1 机器人运动性能
6 结论
本文作者提出了一种仿人爬楼梯步态的机器人,将进行水平方向运动的平移机构和进行竖直方向运动的升降机构相结合,实现爬楼梯运动。对机器人结构功能进行分解并对运动原理进行分析,得到了机器人关键部件的速度模型和受力情况。对机器人的爬楼动作进行模拟仿真与样机试验,验证了爬楼梯机器人的可行性以及运动效果,为康养器械、无人物流,尤其在狭窄楼梯间爬楼梯机器人提供了参考。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
电机与控制学报(2018年9期)2018-05-14
知识窗(2017年9期)2017-09-28
读写算·小学低年级(2016年5期)2016-05-14
股市动态分析(2015年24期)2015-09-10
