
面向管道机器人的模块划分方法研究
2022-11-23 02:08祝海珍袁艳雷永军
机床与液压 2022年21期
祝海珍,袁艳,雷永军
(西安工业大学机电工程学院,陕西西安 710021)
0 前言
管道机器人通过自身携带的工作装置,在操作人员或计算机的控制下,可以沿管道内壁或外壁行走,实现对管道的检测维护和清洁保养,是一种理想的自动化管道设备[1]。但随着管道机器人技术的发展和应用范围的不断扩大,其面临的应用环境和功能需求愈发多样化,不但要求产品迅速更新换代、降低成本,而且要求提高产品质量和服务质量。然而拥有固定结构的传统机器人无法满足上述需求,严重阻碍了管道机器人的应用和推广[2]。
模块化设计是将产品的某些要素组合在一起构成一个通用性模块,再与其他产品要素进行不同的组合,构成新的系统,从而产生多种不同功能或相同功能性能不同的系列产品[3-4]。这种设计方法可以大大缩短设计周期,提高产品设计水平和生产效率,更有利于快速响应客户需求,提供高质量的个性化服务。因此管道机器人模块化技术已经成为科研人员重要的研究方向。
由于模块化设计的过程就是模块分解和模块组合的过程,因此模块划分是模块化设计的前提和基础。所以面向管道机器人提出一种基于公理化设计和IDEF相结合的模块划分方法,为后续模块化设计提供依据。
1 产品结构与功能分析
为了得到合理的模块划分方案,首先必须对产品的结构、功能以及各组成部分之间的关系做出全面细致的分析,构建出功能-结构模型,从而为后续模块划分的具体实施提供依据[5-6]。
1.1 结构分解
目前市场上管道机器人种类繁多、形态各异,从功能角度出发,通常可分为管道维修机器人、管道检测机器人、管道清洁机器人三类。以管道维修机器人为例,采用层次分析法进行结构分解,如图1所示。构建管道维修机器人结构模型,如图2所示。
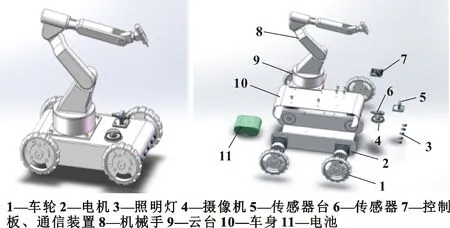
图1 管道维修机器人结构分解

图2 管道维修机器人结构模型
由结构模型可知,管道维修机器人是由驱动系统、支撑装置、控制系统及执行系统四部分组成。其中驱动系统用于提供工作动力包括电机、车轮;支撑装置是承载及支撑管道机器人执行元件的部分,包括车身、云台、传感器平台;执行系统中包括照明设备及各式机械手,机械手可拥有多个自由度用于完成特定工作;控制系统则用于实现人机交互功能,主要包括芯片、电池、通信装置、控制板及传感器组。
1.2 功能分解
通过调查、统计等方法收集、量化客户需求,建立需求与功能间的映射关系,将总需求转化为产品所需的总功能,即维修功能、清洁功能及检测功能。为了保证模块功能能准确满足客户需要,再将总功能进一步细化为一级功能和二级功能。以管道维修机器人为例,构建管道维修机器人的功能模型,如图3上半部分所示。
1.3 建立功能-结构模型
以管道维修机器人为例,根据结构模型、功能模型及两者之间的映射关系,建立功能-结构模型,如图3所示,为后续模块划分工作奠定基础[7-8]。
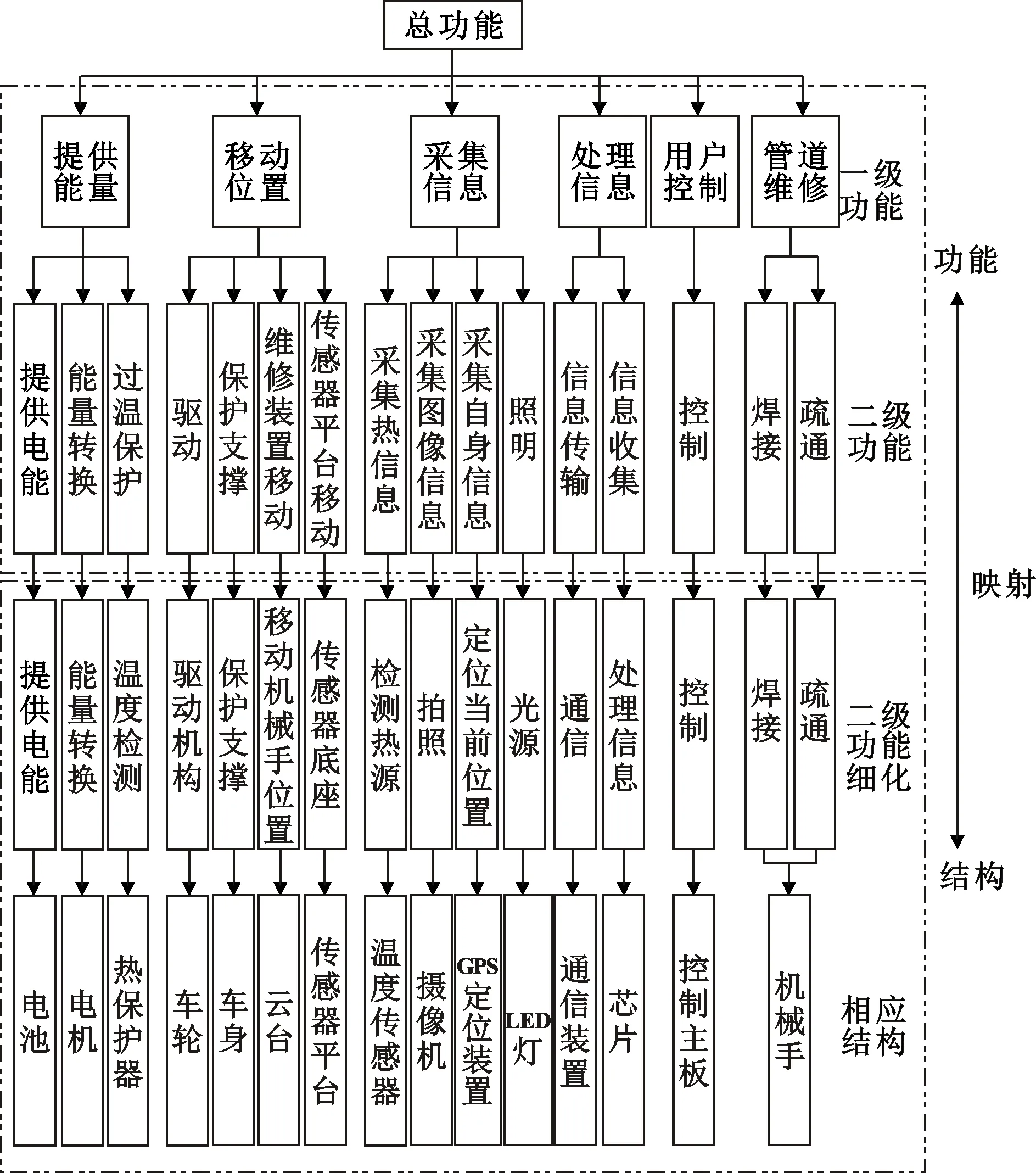
图3 管道维修机器人功能-结构模型
2 模块划分方法的确定
公理化设计是模块划分时常用的一种方法。此方法是以功能分解为基础,通过零部件之间的配合度以及相互之间的影响度来划分模块。由于管道机器人结构复杂、底层零部件较多,若仅应用公理化设计方法来划分模块,不一定能满足功能模块之间的独立性。即,若功能分解得到的设计矩阵为对角阵,则可以单独划分为一个功能模块;但若功能分解得到的设计矩阵为三角阵或满矩阵,则公理化设计不能保证功能模块之间的独立性,则不可作为模块划分的依据[9-11]。而IDEF方法有较强的直观性和交互性,可以清楚细致地观察到系统活动块之间的关系。若存在不能满足独立性公理的子结构,则可以采用IDEF(ICAM DEFinition method,其中ICAM:Integrated Computer Aided Manufacturing)中功能建模的方式将其重新聚类为某一个活动块,利用其可视化的特点,为模块划分提供依据,很好地弥补了公理化设计的不完整性。故提出一种基于公理化设计和IDEF相结合的方法,采用自顶向下的方式,对管道机器人系统进行模块划分。
确定模块划分方法后,绘制流程图,如图4所示。在对管道机器人进行模块划分时,从功能角度出发,首先通过公理化设计中功能域和结构域之间的映射转换,进行管道机器人系统模块的初步划分。若公理化设计中功能和结构的映射关系无法满足独立性公理要求,再使用IDEF设计方法中功能建模的方式,描述功能和需求之间的关系,将关联度小的活动块重新聚类,归为一个功能模块。这种方法不仅简化了整个模块划分的过程,避免了重复设计及庞大的计算量,而且更加高效准确[12-15]。

图4 管道机器人系统模块划分方法
3 管道机器人系统的模块划分
3.1 基于公理化设计的模块划分
(1)最高层第0级
以管道维修机器人为例,其最基本的目标是实现管道内的焊接疏通功能。由此确定最高层次的功能需求为:管道维修。即最高层的FR0-DP0设计为:FR0=管道维修;DP0=模块化管道维修机器人。
(2)第一级分解
确定首层FR0-DP0设计后,利用模块的概念,通过管道机器人每一部分结构所能达到的功能来进行组部件的划分,从而实现对FR0的进一步分解。此层分解得到功能需求和设计参数,如表1所示。
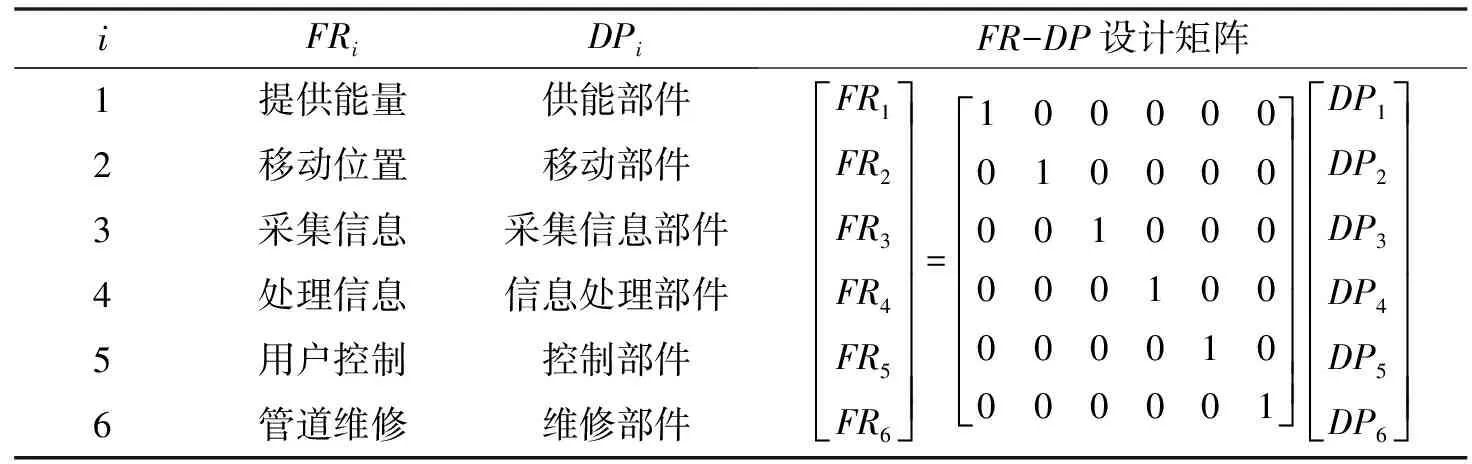
表1 第一级分解
由表1可知,一级分解得到的功能需求和设计参数之间的设计矩阵为对角阵,即第一级分解得到的6个部件级结构,在功能和结构上相互独立,满足独立性公理。故可将管道维修机器人划分为:提供能量、移动位置、采集信息、处理信息、用户控制、管道维修6个一级功能模块。
(3)第二级分解
在第二级分解中,将管道维修机器人的一级功能要求分解为二级功能要求,即将FR和DP进一步“之”字映射分解,如表2所示。
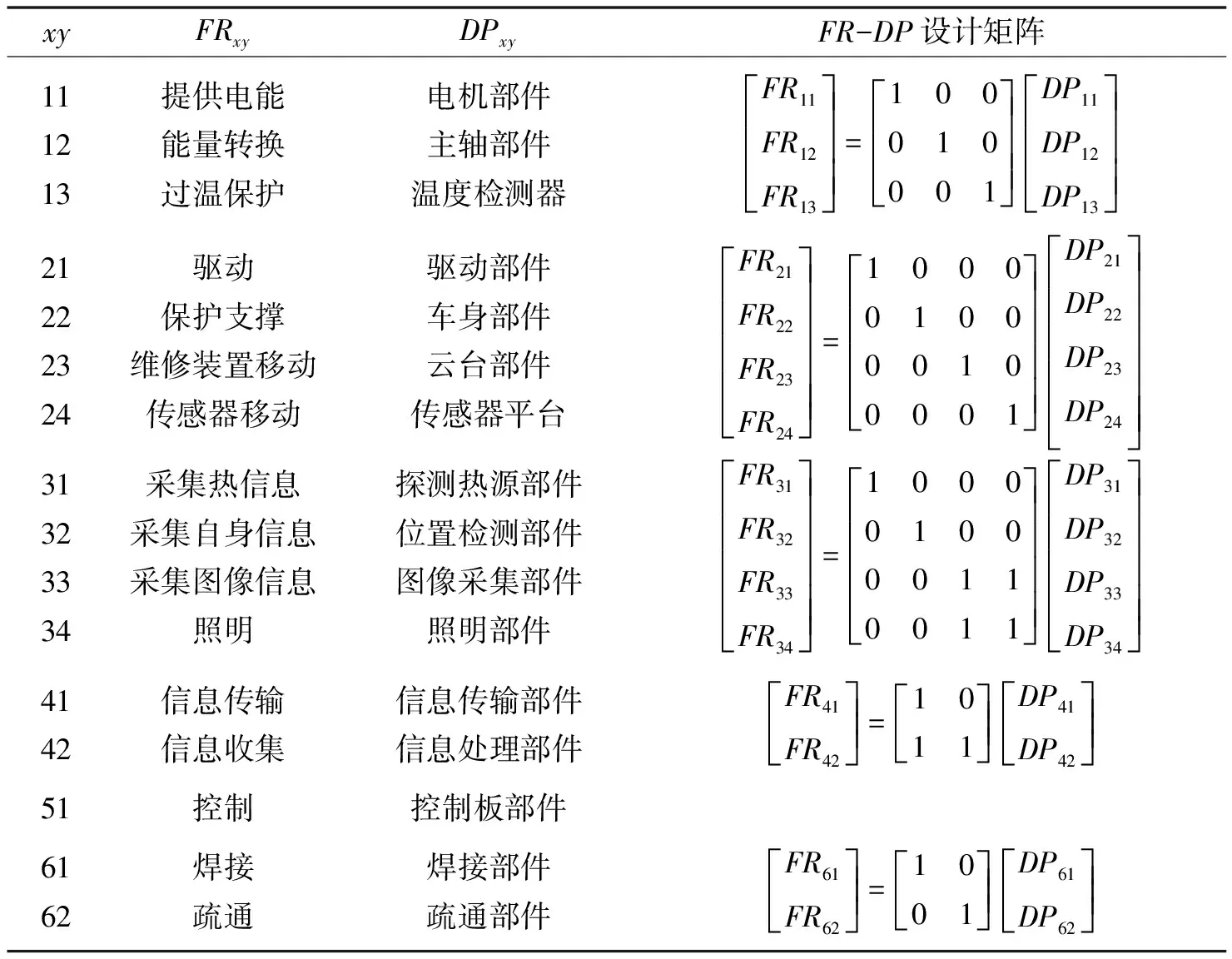
表2 第二级分解
由表2可知:采集信息和处理信息功能的设计矩阵是满矩阵和下三角阵,说明同一级别同一分支下的功能结构之间存在相互影响的关系,无法保证功能和结构上的独立性,故只将其余5个部分做出对应的“之”字形功能-结构映射分解,进行模块划分,如图5所示。则经过第二级分解又划分出电机模块、电池模块等10个二级模块。
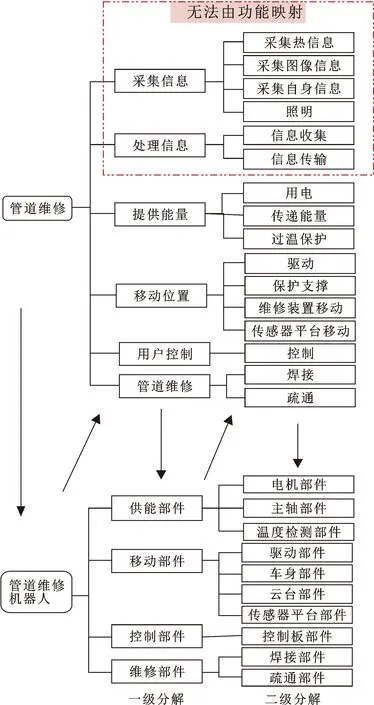
图5 公理化设计方法划分结果
3.2 基于IDEF的模块划分
由于基于公理化设计的管道维修机器人模块划分中,照明和摄像功能相关联,信息传输与信息收集功能也有交互性,不满足模块之间的独立性特征,故采集信息和处理信息这两个功能无法直接划分为相应的二级模块。因此需要进一步采用IDEF功能建模的方法,分析这两个一级功能活动内部的二级功能活动之间的关系,以便进行合理准确的模块划分。若功能需求之间关联度小且所需机制并不相同,则可以划分为一个功能模块。
利用IDEF功能建模的方法,建立模型描述采集信息功能的输入和输出关系,绘制A3图,如图6所示。由A3图中描述的功能关系可知:在采集信息功能活动中,LED灯实现照明功能,摄像机实现采集图像功能,照明功能辅助采集图像信息功能,二者相互协作。但在功能实现所需的设备结构上,并不存在耦合关系,故可以进行模块划分。即采集信息功能模块可细化为:采集热信息、采集自身信息、采集图像信息和照明4个二级功能模块。

图6 采集信息功能A3图
利用IDEF功能建模的方法,建立模型描述信息处理功能的输入和输出关系,绘制A4图,如图7所示。通过观察分析A4图所描述的信息处理内部二级功能关系,发现在信息处理功能活动中,二级功能活动块之间存在数据信息的传输,而在实现功能所需的机制上并不相同,即编码器、通信装置完成信息的传输,而芯片完成信息的收集。二者相关性较小,从功能角度出发的概念设计,可以将其划分为一级功能模块:处理信息模块;二级功能模块:信息传输模块和信息收集模块。
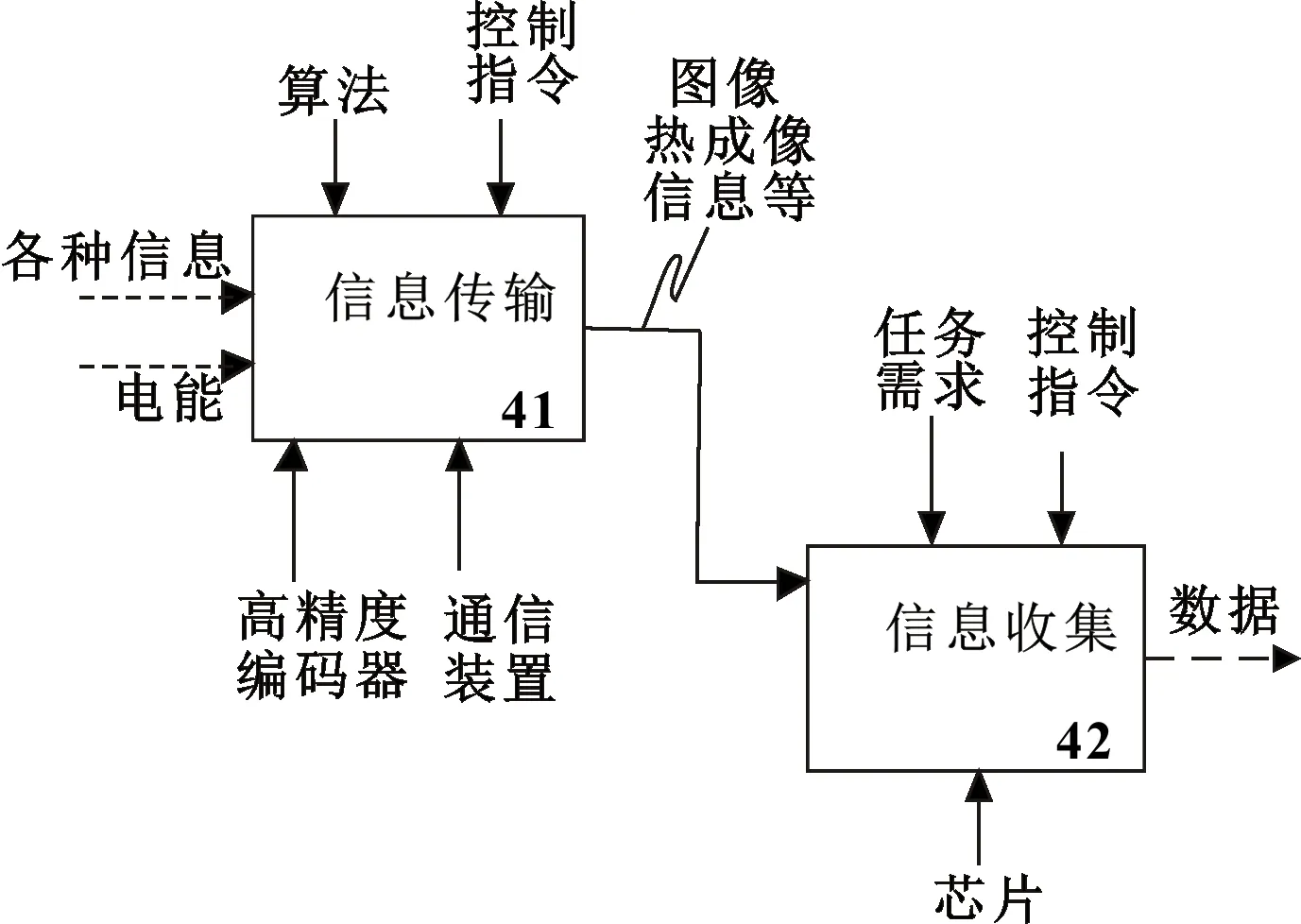
图7 信息处理功能A4图
至此,应用公理化设计和IDEF相结合的方法,完成了道维修机器人系统的模块划分,划分结果如图8所示。

图8 完整的模块划分结果
3.3 提炼共享功能结构
根据上述管道维修机器人模块划分方法,进一步对管道清洁机器人和管道检测机器人进行完整的模块划分,将其划分结果放置一起,便于进行对比分析,如图9所示。
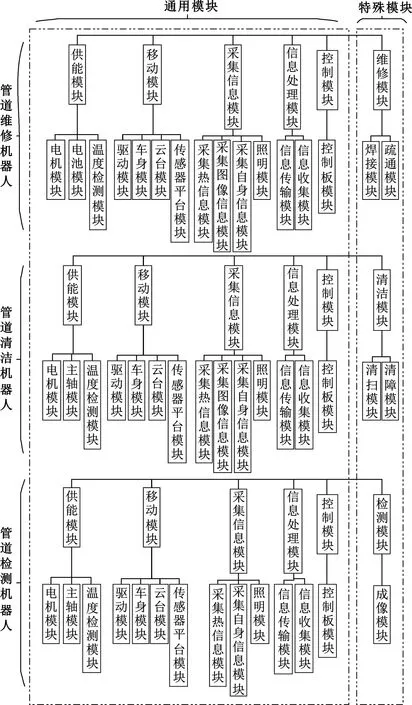
图9 提炼功能模块
通过对三类管道机器人的模块划分结果分析,发现:不同的管道机器人为完成各自的工作内容,只需搭配不同类型的工作装置,其余的功能模块都可以互换通用。故为简化流程、方便模块查询及管理,提炼出通用模块和特殊模块,即将管道机器人系统结构划分通用模块及特殊模块,获得具有一定通用性的模块化管道机器人平台,如图10所示。
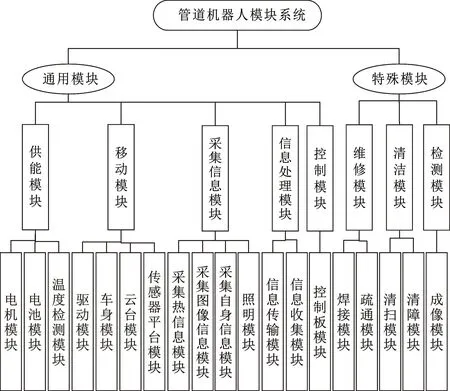
图10 管道机器人模块系统
4 总结
为解决管道机器人面临的应用环境增多、功能需求多变等困难,提出一种公理化设计和IDEF功能建模相结合的方法,对其进行模块化设计研究。从设备整体结构框架入手,首先分析要实现的功能,再由公理化设计分解出不同的功能模块,并判断每一个模块的独立性。对于不满足独立性条件的功能模块,通过IDEF功能建模的方式,可视化地、客观地描述系统内部各个功能活动之间的关系,确定出相对独立的模块,以完善整个模块划分过程。
从功能的角度出发,以自顶向下的方式展开对管道机器人的模块化设计研究,不仅简化了模块划分过程,避免了重复设计及庞大的计算量,而且更加高效准确,在相关领域具有很强的应用性及推广性。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
环球时报(2019-12-03)2019-12-03
中国广播(2016年11期)2016-12-26
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年21期)2016-10-18
琴童(2016年8期)2016-05-14
中学生数理化·高一版(2016年6期)2016-05-14
燃气轮机技术(2014年4期)2014-04-16
环球时报(2009-09-09)2009-09-09
