基于手机内置传感器数据的路段自行车交通服务水平模型研究
2022-11-22 02:04:58张欢,边扬,梁鲲,李玲
交通工程 2022年5期
张 欢, 边 扬, 梁 鲲, 李 玲
(北京工业大学城市交通学院, 北京 100124)
0 引言
目前,对于评价自行车交通服务水平有很多方法如:自行车安全指数等级(BSIR)、自行车风险水平、路况指数体系(RCI)、自行车适应性评级、自行车交通服务水平、自行车适应性评分以及自行车兼容性指标(BCI). 自行车交通服务水平是一项重要的评价方法,广泛应用于自行车交通规划、设计、监控、优先权划定等策略制定方面,大量研究人员利用自行车交通服务水平来评价道路的舒适性和安全性[1].
国内对于自行车交通服务水平的影响因素研究较少,在《城市道路交通规划设计规范》(GB50220—95)中采用行车速度、路段(交叉口)饱和度为主要评判指标[2]. 而《城市道路设计规范》(CJJ37—2012),将骑行速度、占道面积、负荷度作为路段自行车交通服务水平的主要影响因素[3]. 赵贤兰等[5]在分析自行车交通特性与骑行影响因素的基础上,通过改进自行车兼容性指数模型建立连接段服务水平模型,确定服务水平分级标准. 曹士强等[5]将不同道路断面隔离形式下的非机动车横向偏移率作为主要指标.
1 路段自行车交通服务水平影响因素分析
结合国内外自行车交通服务水平研究的影响因素和北京市内的道路交通特点,确定本文研究主要从道路交通环境条件、骑行行为特征条件、主观感受3个方面来选取自行车服务水平影响因素.
道路环境因素包括道路等级、非机动车道的有效宽度、隔离形式、出入口数量、路段的公交站点数都对骑行者有显著影响;交通环境条件主要选取:机动车交通量、非机动车逆行交通量、电动自行车与助力车交通量、最外侧车道的机动车流量(分车型)、机动车和非机动车的车速、路侧停车比例、行人占用非机动车道情况在内的7项指标;骑行行为特征从速度和加速度2个方面进行选取;主观感受评价指标指的是骑行者对1个路段的整体骑行感受信息主要从安全感和舒适感2个方面进行评价.
自行车交通服务水平体现骑行环境的好坏,通过对上述3种条件的组合可产生出不同的自行车骑行环境,如:非机动车和有效宽度大、采取物理隔离、出入口数量和公交站点数量小、交通环境简单、车流量少无机非混行影响的道路,必然会导致个人的骑行速度处于较高水平且速度的变化较小,同时骑行者的整体感受在这种路段往往评分较高.
2 数据采集与处理方法
在明确影响因素的前提下,文章需要获得3类基础数据:道路交通环境数据、骑行行为特征数据、主观感受数据. 在北京市内选取不同影响因素下的组合,设计骑行行为实验和道路交通环境调查实验;然后根据不同数据的特点对数据进行预处理工作.
2.1 非机动车骑行行为信息采集
骑行行为实验共需采集2类数据,分别是骑行行为特征数据、主观感受数据. 道路交通环境调查实验主要采集道路交通环境数据. 本文对19段典型道路进行道路交通环境调查如表1所示.
骑行行为数据主要利用手机内置传感器进行数据采集,分别采集骑行过程中的GPS数据(1个/s)和加速度数据(20个/s). 骑行行为实验分别在早高峰和晚高峰2个时段进行,实验车辆为共享单车,共选取实验者30人,15男、15女,并分为青年组和中老年组,即每个路段在1个时段进行实验30次. 预计得到样本2×30×19=1 140条. 道路交通环境调查实验与骑行行为实验同步进行,主观感受评分采用李克特5级量表,1为极差,5为极好. 最终共得到有效样本1 011个,其中5级整体感受在19段道路上的分布如图1所示. 样本整体打分较高,但是依旧可看出不同骑行环境的差别,如:骑行环境特别差的道路,路段6和13,是无隔离、机非混行且道路交通环境条件复杂的路段.
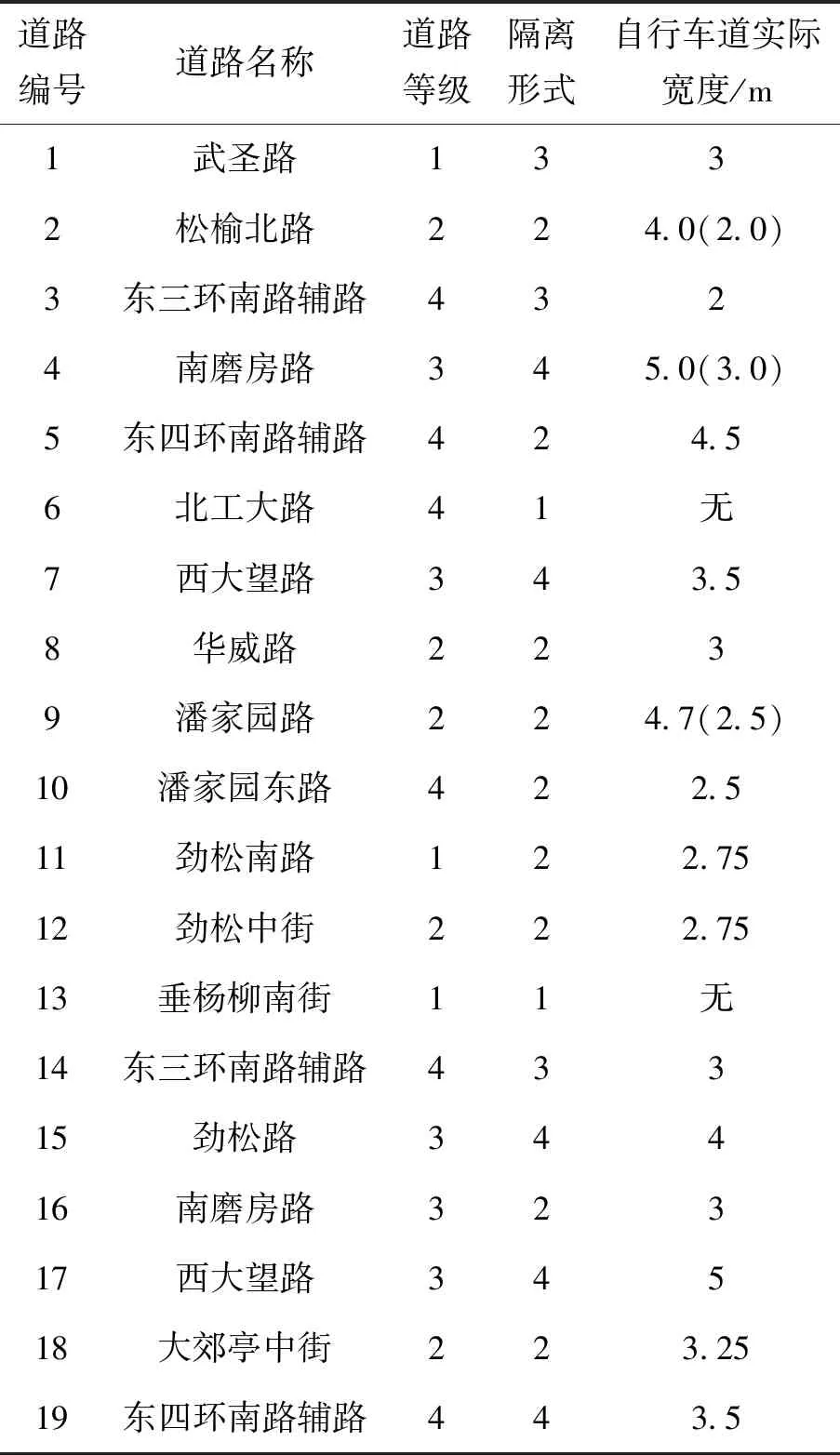
表1 实验路段基本信息
2.2 数据处理方法
通过手机GPS模块采集的速度数据与通过加速度计模块采集的加速度数据存在误差包含很多噪音,需要对两类数据进行相应的预处理工作.
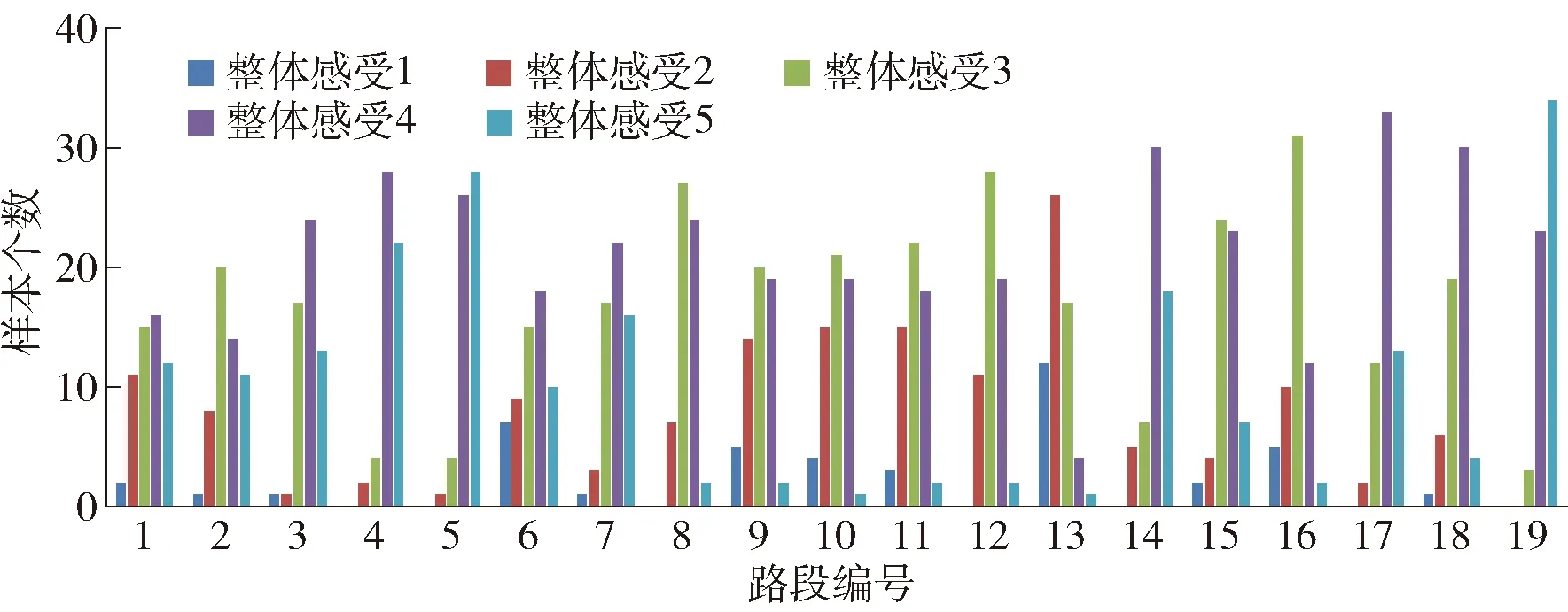
图1 路段—整体感受水平分布图
2.2.1 速度数据预处理
速度数据主要通过GPS数据计算而来,软件所采集的数据为逐秒的GPS点位信息,采集频率为1 Hz. 包含经纬度信息以及UNIX时间戳信息. 设置7项数据清洗原则:
1)字段缺失
指采集过程,GPS字段、加速度字段、欧拉角字段缺失的删除处理;
2)上一时刻相同点位
研究路段的骑行行为特征不考虑停止,因此速度为零点删除;
3)时序数列判断
GPS数据采用逐秒记录,对于大于1.2 s和小于0.8 s的数据删除;
4)瞬时速度判断
瞬时速度大于12 m/s的点删除,实验用自行车不可能到达该速度;
5)其他类型数据、加速度、GPS三者对应判断
与其他类型数据(道路交通环境数据等)对应,其他数据缺失导致描述样本的属性不全面;
6)利用经纬度位置判断
利用经纬度判断单个路段的骑行实验的起点和终点;
7)记录条数判断
通过逐秒记录的单个样本应该保持在100个GPS点以上,设备原因导致记录点过少,删除这类数据.
通过上述7个步骤的GPS数据清洗,对于速度数据的处理已经有一定效果,但是由于GPS数据存在漂移现象,因此利用莱茵塔准则对速度数据进行去除粗大误差处理. 如式(1)所示:
(1)

2.2.2 加速度数据预处理
加速度数据的采集频率为20 Hz,手机内置的加速度计是三轴加速度计,所测量的三向加速度是以手机为坐标系的3个方向(x、y、z).同时手机还可通过姿态传感器采集手机的姿态数据即欧拉角数据(ψ、γ、θ),利用式(2)将2类数据融合,将加速度转换到以世界坐标系为基准[6].
(2)
转换完坐标系的加速度3个轴向分别是X轴正东方向、Y轴正北方向、Z轴垂直地面方向3个方向上的加速度(x′、y′、z′).由于所选的实验道路均为正南正北正东正西的路段,因此再将世界坐标系下的加速度转换到以骑行者本身为坐标系之上,即沿骑行方向,垂直于骑行方向以及垂直于地面方向.经过一系列的坐标变换处理,将以手机坐标系下采集的加速度数据转换到以骑行者为坐标系上来.由于加速度计在数据采集过程中存在白噪音,因此选用滑动均值滤波法对加速度数据进行滤波处理,滑动均值滤波的原理见式(3),本文采用MATLAB软件实现此过程,单个样本的滤波结果如图2所示:
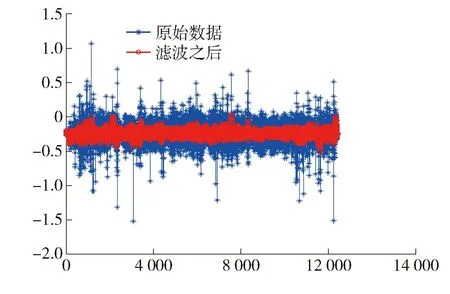
图2 滑动均值滤波结果

(3)
式中,y(k)为滤波后的第k个数值;x(k+i)为滤波前的第k+i个数值;N为滑动窗口大小(本文取N=10).
3 非机动车骑行行为特征研究
在非机动车骑行行为数据提取的基础上,应用数理统计分析方法,研究速度相关骑行行为特征和加速度相关骑行行为特征,对比分析不同道路交通环境条件下的骑行行为.
提出2类骑行行为指标分别是速度相关骑行行为指标和加速度相关行为指标,主要分为8种统计学特征,分别是均值、方差、中位数、变异系数、最大值、最小值、85%位数值、15%位数值. 因此速度和加速度共提取32项(其中加速度为3个方向)骑行行为特征指标. 这些特征指标可代表不同骑行环境下的骑行行为,如速度均值、方差等指标代表的是骑行的整体情况,而加速度的最大值、最小值,85%位数值和15%数值则是代表骑行的急加速和急减速情况.
结合道路交通环境数据、主观感受数据,最终得到1 011行、45列的样本集合. 其中19段道路的部分骑行行为特征指标如表2所示:
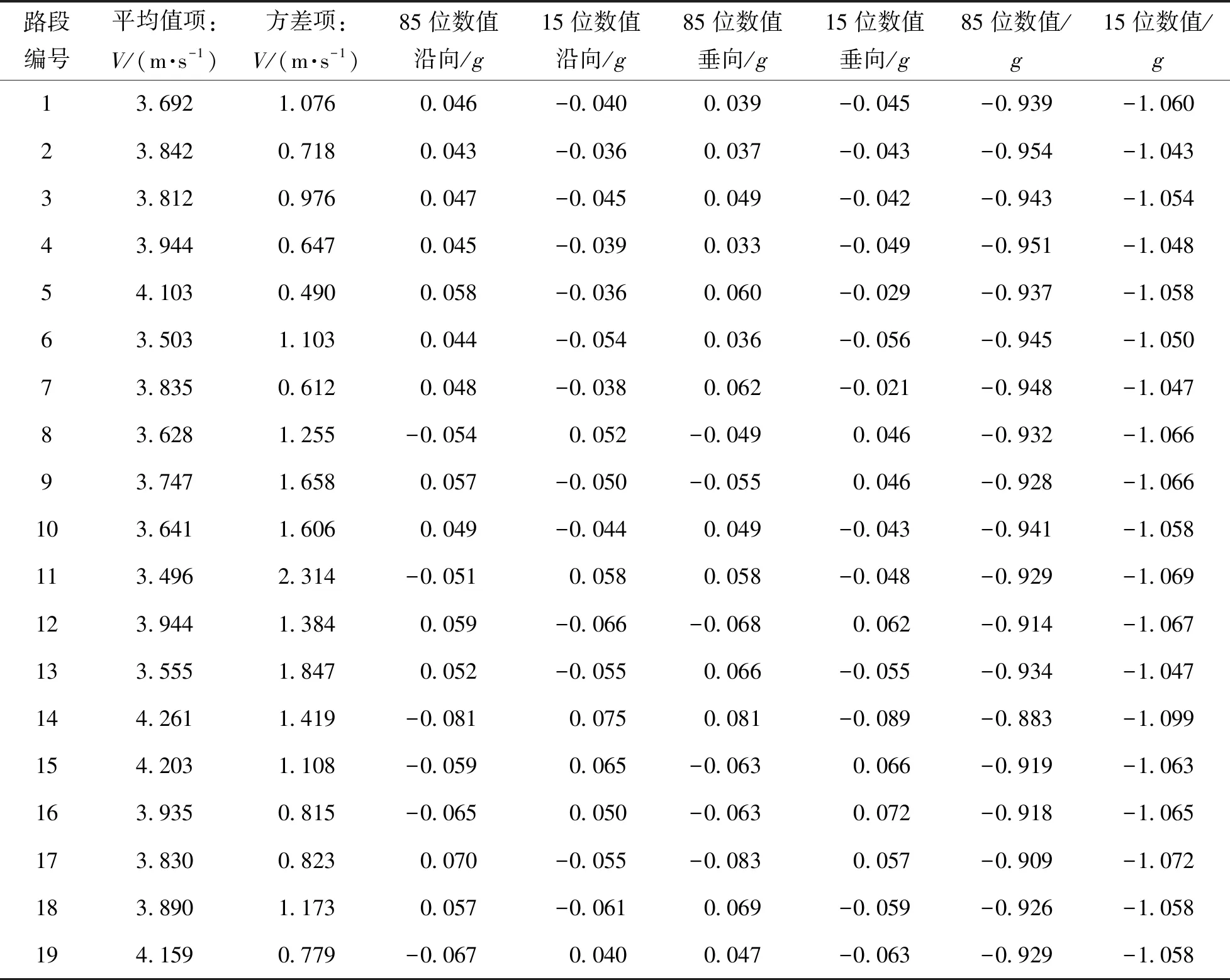
表2 各路段骑行行为特征分析
通过表2可看出一些骑行特征分布规律,如:路段5、7、15、19等路段的速度值较高,且速度方差较低,以上路段均为隔离设施完善且有效非机动车道宽度较宽的路段;如:路段6、13为19条路段中仅有的2条没有任何隔离形式的支路,在速度均值和方差上则体现出整体速度水平偏低且速度的波动性高,说明在上述路段骑行过程中受干扰程度大.
绘制5级主观感受与速度相关骑行行为特征和加速度相关骑行特征的散点图,如图3~6所示:
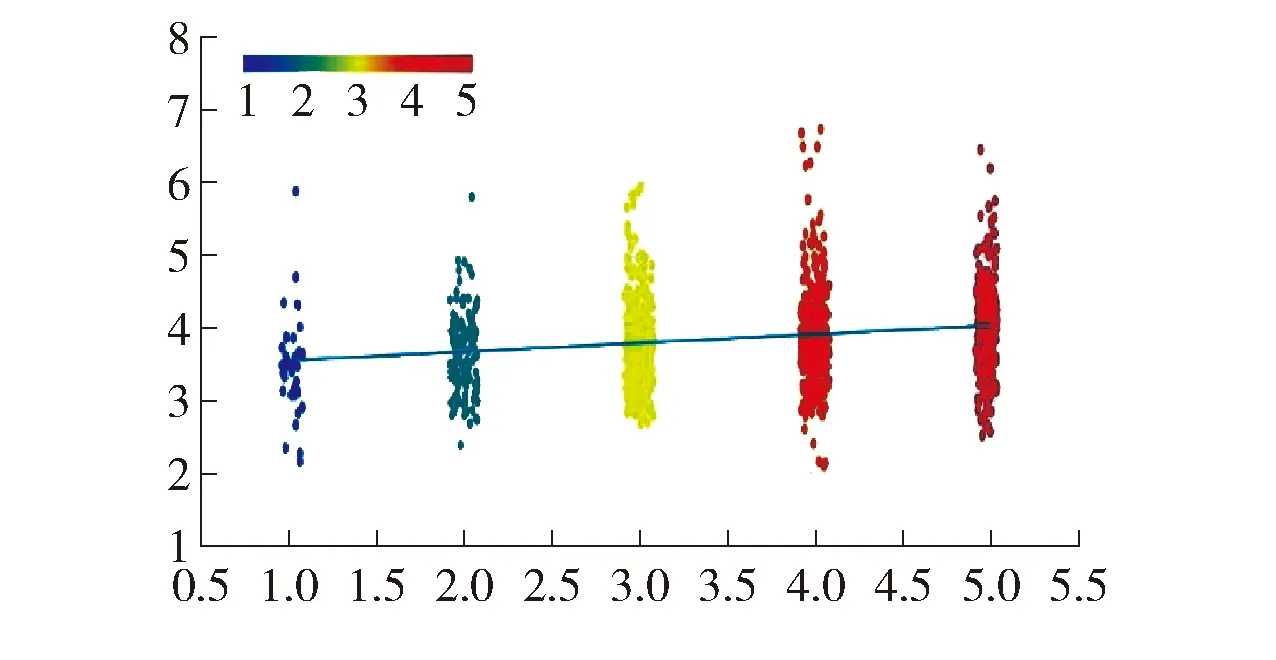
图3 主观感受- 速度均值散点图

图4 主观感受- 速度方差散点图
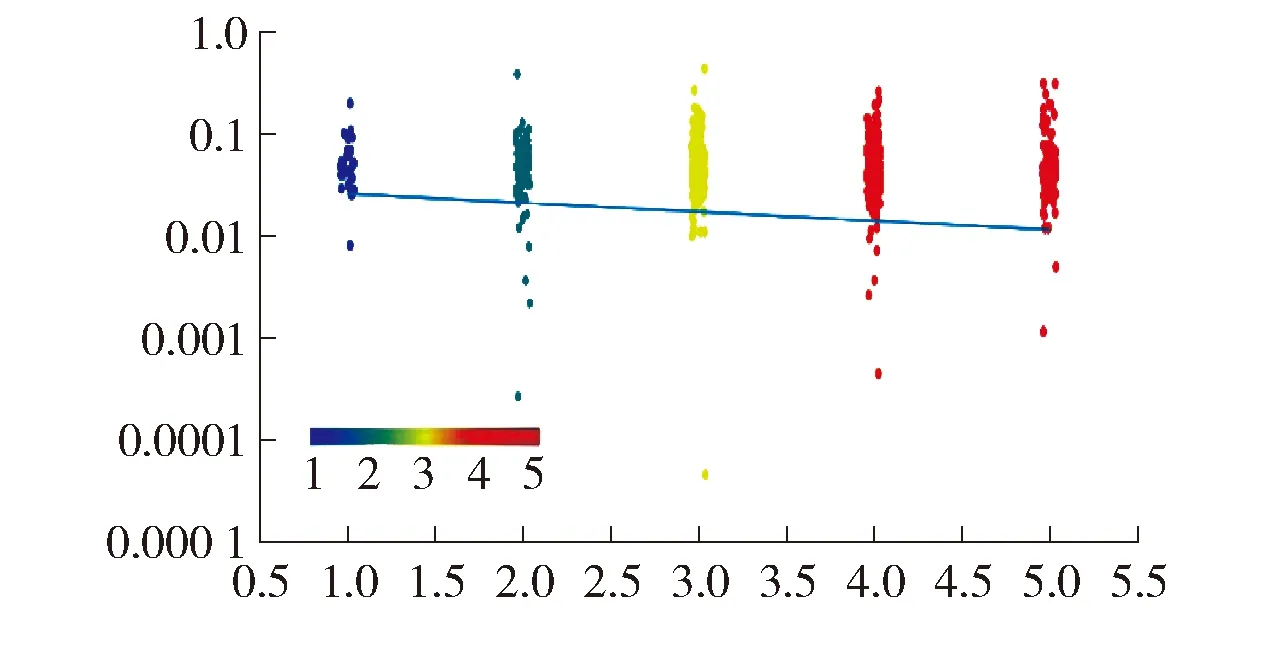
图5 主观感受-85%位加速度(沿向)散点图
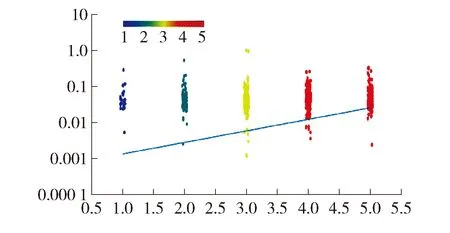
图6 主观感受-85%位加速度(垂向)散点图
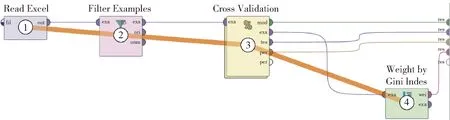
图7 随机森林分类器主程序
可得出:①不同骑行感受水平下具有不同的骑行行为特征;②好的骑行体现出速度水平较高且速度的变化小,符合一般实际情况,一般骑行速度处于较高水平且速度变化不大的骑行环境更受骑行者欢迎;③加速度2个方向上的85%位加速度值在主观感受不同水平上呈现的趋势不同,即沿向85%位加速度与主观感受呈负相关趋势,垂向85%位加速度与主观感受呈正相关趋势,说明对于感受不好的骑行而言,容易在行进方向上做出更多的急加减速行为,骑行者没有其他办法规避沿着骑行方向上的冲突,而感受好的骑行则在沿着垂直方向做出的急加减速行为较少,可通过做出垂向的急加减速行为(超越或者绕行)规避冲突.
4 模型构建与结果分析
随机森林分类算法是机器学习算法的一种,主要采用bootstrap抽取即有抽取放回的方法对样本进行抽取并将样本分为样本集和测试集2个部分,从而达到学习和预测目的的机器学习方法. 随机森林分类算法具有不容易过拟合、抗噪声能力强、适用于处理高维度即多特征的数据,不用做特征选择等优点,对于数据集中个别数据的缺失有很好的适应性[7].
本章在数据集的基础上,采用机器学习的方法对样本进行学习和预测,最终构建基于随机森林算法的路段自行车交通服务水平模型.
为保证分类质量,将5级感受分为2个级别,即服务水平“好”(主观感受“4~5级”)和服务水平差(主观感受“1~3级”). 利用Rapid Miner软件构建随机森林分类器,采用十折交叉验证,并利用基尼系数判断属性的重要性程度. 如图7、图8所示:
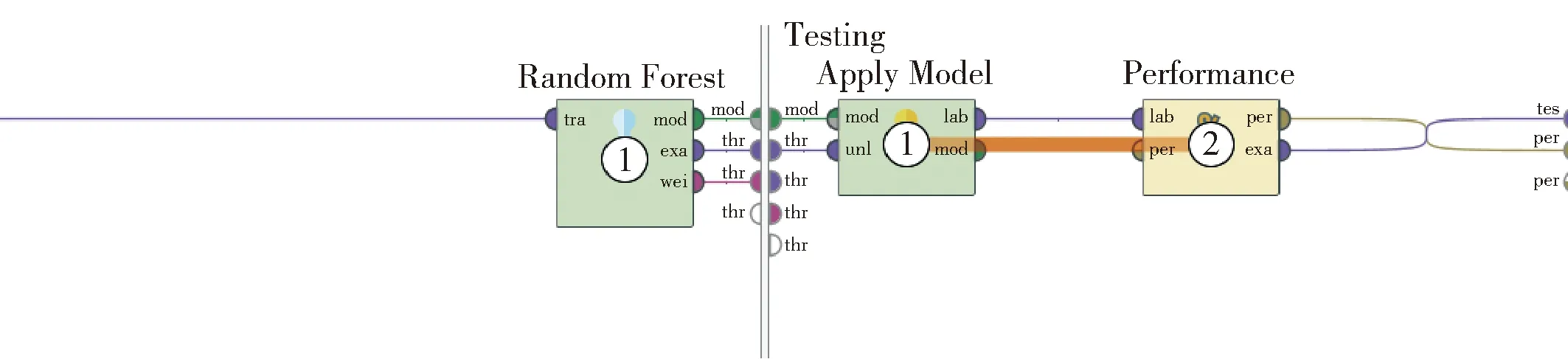
图8 交叉验证子程序
随机森林算法不需要做特征选择,因此以基于主观感受所得的2类服务水平作为“标签”,以骑行行为特征、道路环境特征、交通环境特征为“属性”带入模型学习并预测. 样本为1 011例,属性特征为45项. 模型预测结果和不同特征属性的重要程度如图9、图10所示:
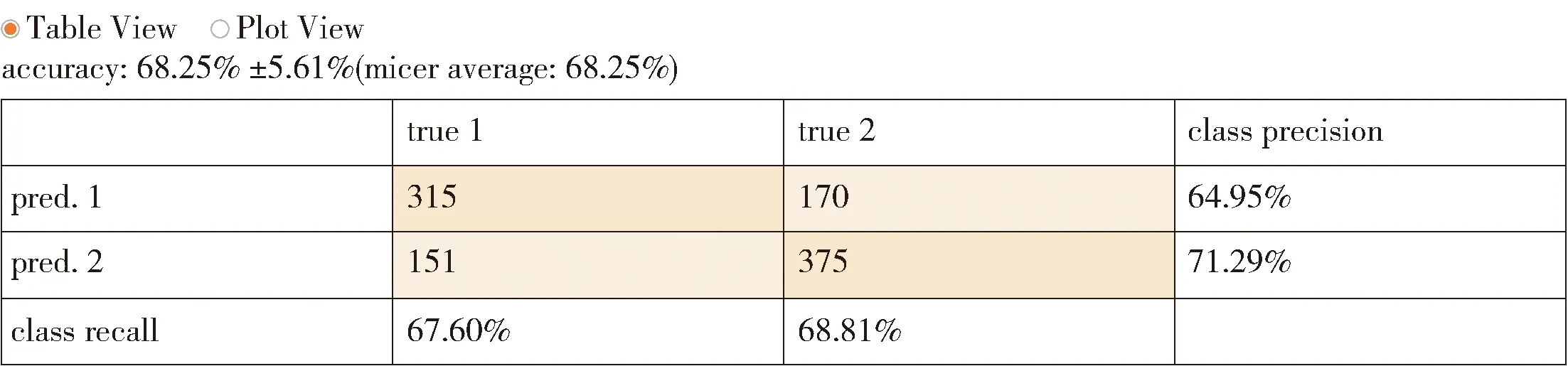
图9 模型预测结果
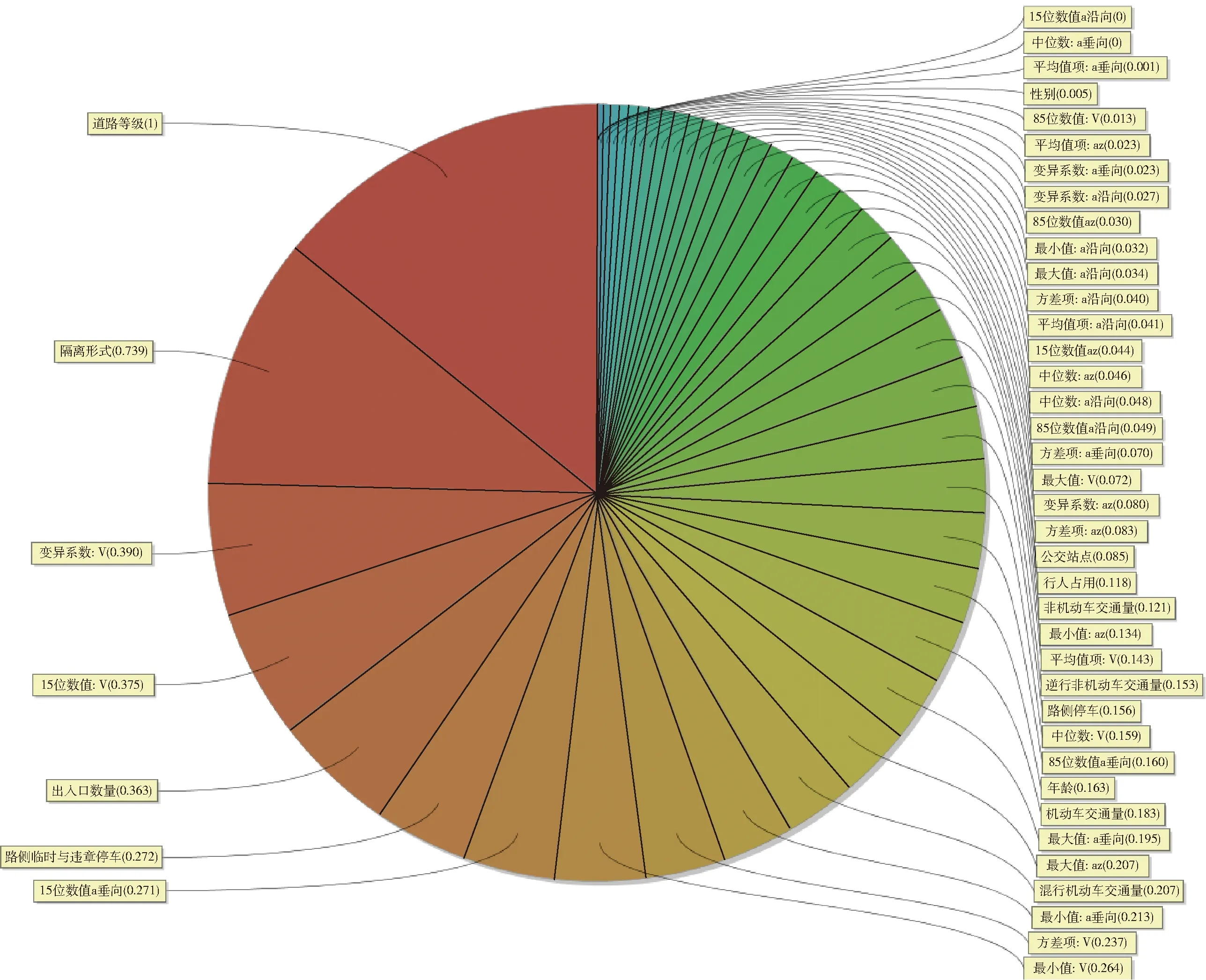
图10 特征属性重要性程度
模型分类精度在二分类情况下为68.25%,与文献[8]中基于Probit模型的分类精度68.4%和基于SVM分类器的分类精度75.5%相差不大. 对于以主观感受为标签来说分类精度比较理想. 同时通过特征属性重要程度图可看出,经典的自行车交通
服务水平研究中如:道路等级、隔离形式、出入口数量、路侧停车、混行机动车交通量等对服务水平具有较大影响,但是也可看出个人的骑行行为特征如:速度变异系数、速度15%位数值、速度方差、垂向加速度最大值等也对模型有不小的贡献. 说明个人的骑行行为特征可用于划分自行车交通服务水平.
5 结束语
构建基于随机分类分类器的自行车服务水平模型,以个体骑行行为作为样本进行学习和预测,证明个体的骑行行为特征可用自行车服务水平的研究,最终两类预测的精度达到68.25%,分类模型精度较高,整体模型较为理想. 但采用主观评价作为自行车交通服务水平划分过于主观,需要进一步加入客观数据使分类模型精度进一步提高.
猜你喜欢
工会博览(2022年5期)2022-06-30 05:30:18
四川劳动保障(2021年8期)2021-12-02 02:13:34
商用汽车(2021年4期)2021-10-17 02:04:15
中国交通信息化(2021年2期)2021-07-22 07:34:40
IEEE/CAA Journal of Automatica Sinica(2021年2期)2021-04-22 03:54:26
活力(2019年19期)2020-01-06 07:35:32
建材发展导向(2019年11期)2019-08-24 06:34:56
中国粮食经济(2018年11期)2018-12-27 08:58:34
现代园艺(2018年2期)2018-03-15 08:00:16
汽车与安全(2017年5期)2017-07-20 10:58:34