忆惯容器非线性悬架的网络综合设计方法
2022-11-20 11:42聂佳梅黄小荣张孝良韦颢
华南理工大学学报(自然科学版) 2022年9期
聂佳梅 黄小荣 张孝良 韦颢
(1.江苏大学汽车与交通工程学院,江苏镇江 212013;2.江苏大学汽车工程研究院,江苏镇江 212013)
SMITH等基于机电相似理论提出了惯容器的概念,并将惯容器应用于车辆悬架中,形成了“惯容-弹簧-阻尼”(ISD)悬架结构[1-2]。惯容器的出现不仅丰富了悬架结构类型,而且实现了“惯容-弹簧-阻尼”机械网络系统与“电容-电感-电阻”电路网络系统之间严格对应相似[3-7],使得长期以来积累的大量电路网络理论能够直接运用于机械网络的研究中。
网络理论可分为网络分析与网络综合[8],这两部分互为逆过程。目前对于悬架网络的研究,网络分析方法仍是主流[9],即:先假定悬架的结构,然后采用各种算法对悬架的参数进行优化。这一方法存在着显而易见的不足,容易将悬架网络的结构局限在几种固定结构中,从而忽略掉一些性能比较好的结构。而综合法将整个悬架系统看作一个大的机械网络,根据路面输入和期望的车辆性能输出,先求出悬架的传递函数,据此用惯容器、弹簧和阻尼器中的两种或两种以上基础元件构建出悬架的具体结构,从而设计出满足预期性能的悬架系统。这种由性能倒推结构的方法可以有效地发掘更多性能更好的悬架结构。因此,网络综合方法开始逐渐受到关注。
Wang 等[10]利用网络综合方法,提出了一种火车ISD 悬架,改善了火车的动态性能、乘坐舒适性及稳定性。Papageorgiou 等[11]尝试使用网络综合方法来找到一种能够改善轮胎接地性的ISD 悬架结构。然而目前悬架网络综合设计方法的研究主要基于传统的线性元件,基于非线性元件的悬架网络综合设计方法鲜有研究。
随着忆阻器等电路记忆元件的发现[12-14],机电相似理论被进一步推广到非线性领域[15-16]。对应于电路记忆元件,忆惯容器、忆阻尼器等机械记忆元件的概念及其物理实现装置先后被提出和发现[17-20]。在电学中,忆容器被证明是一种具有记忆特性和自适应性的非线性被动元件[21]。Zhang等[22]根据机电相似原理预测忆惯容器具有相似的特性,并认为忆惯容器能够与一个位移依赖的半主动惯容器等效。利用这种等效关系设计忆惯容器非线性悬架是解决非线性悬架设计问题的一种新思路和尝试。
本研究将基于忆惯容器的等效惯质定理,类比电路网络理论,提出一种忆惯容器非线性悬架系统的网络综合设计方法,设计一阶及高阶忆惯容器悬架结构,分析忆惯容器悬架的载荷适应性,并验证了各阶结构在随机路面输入下的性能。
1 等效惯质定理
1.1 忆惯容器的等效惯质定理
为方便下文介绍网络综合设计方法,本节给出忆惯容器的等效惯质定理并利用能量方法证明。
假设忆惯容器惯质系数B(x)可以表示为关于位移的多项式函数:

式中,A、B、C、n均为有理数。对忆惯容器装置施加如下的位移激励:

式中,x0表示装置的初始位移,θ(t)表示位移激励随时间的变化量。则式(1)可改写为

根据多项式展开定理,式(3)可改写为

式中,a1,a2,…,an为正有理数。
忆惯容器存储的能量Em可计算为[22]:

式中,v表示装置两端点的相对速度,ηθ(t)=a1θ(t)+a2θ2(t)+…+anθn(t)。
线性惯容器的惯质系数为b,其储存的能量Ei可用下式计算:

对式(6)等号两边同乘(A(x0+B)n+C)/b,可转换为
将式(5)和式(7)结合可得

结合忆惯容器和线性惯容器的能量表达式,可以计算出两者的差值:
要使忆惯容器和线性惯容器的能量相等,需要式(9)值为0,即

实际情况下,机械振动系统受到随机激励的均值均可视为零。因此,位移激励x(t)也可以视为均值为0 的周期函数进行研究,周期为T且t1-t0=nT,n∈n+。根据式(10)可得

显然v也是一个周期函数,周期与x(t)相等,则

结合式(11)和式(12)得:

因此,只要线性惯容器的惯容值满足下式,就可以与对应初始位移的忆惯容器能量等效,

综上所述,忆惯容器的等效惯质定理可定义为:在t=t0到t=t1时刻内,如果忆惯容器惯容系数B(x)可以表示为关于位移x的多项式函数,而相对位移x(t)是周期为T的周期函数,且t1-t0=nT,n∈n+,那么从能量储存的角度来看,在初始位移确定后,忆惯容器可以等效为一个线性惯容器,等效惯质系数等于忆惯容器在初始位置时的惯质系数。
1.2 忆惯容器与半主动惯容器的等效性
由式(14)可知,忆惯容器具有与位移初始值相关的等效线性惯质系数,可等效于一种具有初始位移依赖的半主动惯容器,如图1所示。

图1 忆惯容器的等效半主动惯容器示意图Fig.1 Schematic diagram of a semi-active inerter equivalent to the mem-inerter
因此,忆惯容器具有类似于半主动惯容器的惯容调节功能,其等效惯质系数对初始位移的变化具有自适应性。同时,相比于半主动惯容器,忆惯容器不存在时滞问题。
2 忆惯容器悬架系统网络综合
2.1 悬架网络综合设计方法
忆惯容器悬架系统的网络综合过程可以分为忆惯容器悬架结构综合和参数综合两个过程。
结构综合即根据机电相似理论,运用电路网络的正实综合方法确定悬架结构。具体步骤包括:首先,结合正实定理,通过建立并求解鲁棒控制器获取悬架系统的阻抗传递函数,然后利用3种被动机械元件物理实现求解获得的悬架阻抗传递函数,根据忆惯容器的等效惯质定理,将线性惯容器替换为忆惯容器,从而确定忆惯容器悬架的结构。
参数综合主要包括结构参数综合和装配参数综合。首先,选取悬架网络最典型的一些工作点,例如空载、半载和满载工作点,确定悬架在各个工作点的结构参数。再根据实际工程需要确定悬架系统的装配参数,最终获得完整的悬架网络系统参数。
2.2 忆惯容器悬架结构综合
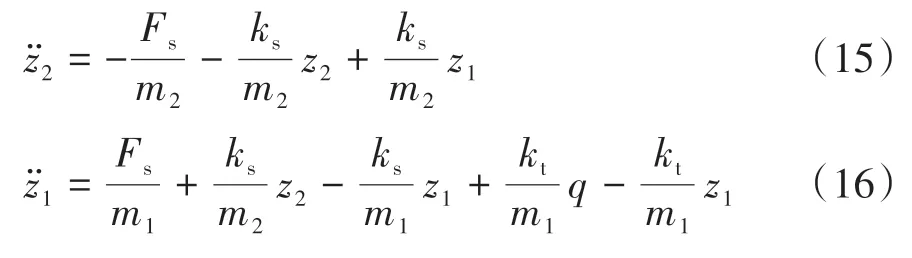
图2 所示为含鲁棒控制器的悬架系统的1/4 车辆模型,悬架结构由已知部分和未知部分组成,已知部分包括主弹簧ks,未知部分包括一个鲁棒控制器K(s),即图中的虚线部分。其中,s为拉普拉斯算子。假设m2表示簧上质量,m1表示簧下质量,kt表示轮胎刚度,z2、z1、q分别表示车身、车轮位移和路面输入,Fs表示正实控制器作用在簧载质量和非簧载质量上的等大且反向的力。

图2 含鲁棒控制器的悬架系统的1/4车辆模型Fig.2 Quarter vehicle model of suspension system with robust controller
建立1/4车辆模型动力学方程:
状态变量和输入变量可表示为

该系统的状态方程可描述为

选取某乘用车作为悬架系统的应用车型。设1/4车辆模型的空载簧载质量m2f=300 kg,满载簧载质量m2n=480 kg,非簧载质量m1=45 kg,主弹簧刚度ks=22 kN/m,轮胎刚度kt=192 kN/m。假设车辆以v=20 m/s 驶过路面不平度系数为G0=6.4×10-5m3的路面。利用Matlab 软件中的YALMIP 工具箱结合进化算法以及直接搜索工具箱求解鲁棒控制器如下式所示的一阶、二阶和三阶鲁棒控制器。其中τ0、τ1、τ2、ζ0、ζ1、ζ2均为待定常参数。

通过上述方法求解获得空载、半载和满载时的各阶控制器Kin(s)、Kih(s)和Kif(s),其中i=1,2,3。在上述3种综合结构加上主弹簧后构成了线性惯容器悬架系统,主弹簧ks起到支承车身质量的作用。一阶、二阶、三阶线性惯容器悬架的1/4 车辆模型如图3所示。图中c为阻尼器的阻尼系数,b为惯容器的惯质系数。

图3 3种线性惯容器悬架的1/4车辆模型Fig.3 Quarter vehicle model with three kinds of linear inerter suspension
对于线性惯容器悬架,随着车辆载荷的变化,阻尼器阻尼系数的变化幅度较小,而惯容器惯质系数的变化幅度较大,且呈现线性变化趋势,可以将线性惯容器替换为半主动惯容器。根据第1节中证明的忆惯容器的等效惯质定理,可以将一阶半主动惯容器悬架中的半主动惯容器替换为忆惯容器,构成一阶忆惯容器悬架结构。同样地,可以得到二阶和三阶忆惯容器悬架结构,如图4 所示。z3、z2、z1和q分别表示悬架、车身、车轮位移和路面输入。
由图4可以分别给出忆惯容器悬架各阶结构1/4车辆模型的运动学方程:

图4 各阶忆惯容器悬架的1/4车辆模型Fig.4 Quarter vehicle model of each order mem-inerter suspension
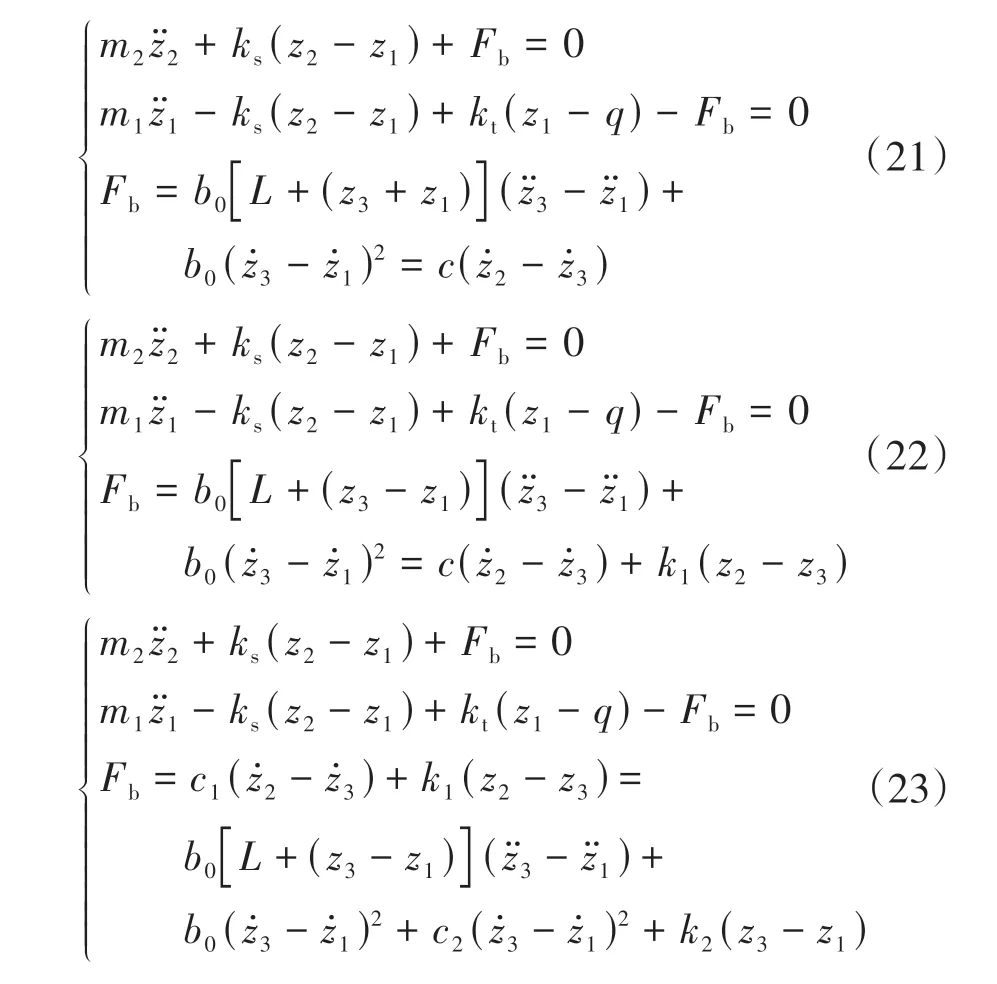
式中,Fb为忆惯容器两端的力,L为惯容器的静平衡位置,b0为忆惯容器的初始惯质系数。
2.3 忆惯容器悬架参数综合
为提升悬架的综合性能,在确定悬架系统参数前需要进行参数优化。评价悬架的性能一般需要参考以下3个指标:车身垂直加速度、悬架动行程与轮胎动载荷。因此,就需要以改善上述3个指标为目标,对悬架参数进行多目标优化。
对线性惯容器悬架优化时,可以选用传统被动悬架作为比较对象,将正弦激励下线性惯容器悬架车身加速度、悬架动行程和轮胎动载荷的均方根值分别与相对应的被动悬架评价指标的均方根值的比值与加权系数相乘,再将三者之和作为目标函数,如式(24)所示:
式中:J为目标函数,BA(x)、SWS(x)、DTL(x)分别表示非线性惯容器悬架的车身加速度、悬架动行程和轮胎动载荷均方根值;BA、SWS、DTL分别表示传统悬架的车身加速度、悬架动行程、轮胎动载荷均方根值。车辆满载时,需要优先考虑车辆的乘坐舒适性,保证乘客乘坐舒适及货物完好。然后考虑车辆的操纵稳定性。因此优化主要偏向于车身加速度,其次为轮胎动载荷和限位块撞击几率,即悬架动行程。综合考虑后选取加权系数(ω1,ω2,ω3)=(0.54,0.13,0.33)。
优化过程中,一阶、二阶、三阶综合悬架中各元件参数的上下限的设定参考了几种主流悬架的参数,见表1。

表1 元件参数取值上下限Table 1 Upper limit and lower limit of component parameter value

选取作为比较对象的传统被动悬架为弹簧和阻尼器并联结构,主弹簧刚度设为22 kN/m,车辆参数和前文一致。
假设车辆以速度v=20 m/s匀速行驶在路面不平度系数G0=5×10-6m3的路面上,再选取高斯白噪声作为路面输入,然后利用遗传算法进行多目标优化。初始种群数设为30。为保证最终解的精度,避免陷入局部最优解,设置迭代次数为100次,交叉概率为0.9,变异概率随迭代次数自适应变化。最终满载工作点的悬架参数优化结果如表2所示。

表2 满载工作点悬架系统参数Table 2 Parameters of suspension system in full load working point
忆惯容器悬架结构中弹簧和阻尼器为线性元件,参数设为悬架系统满载工作点的综合结果,在半载和空载工作点仅综合惯容器的参数,结果见表3。
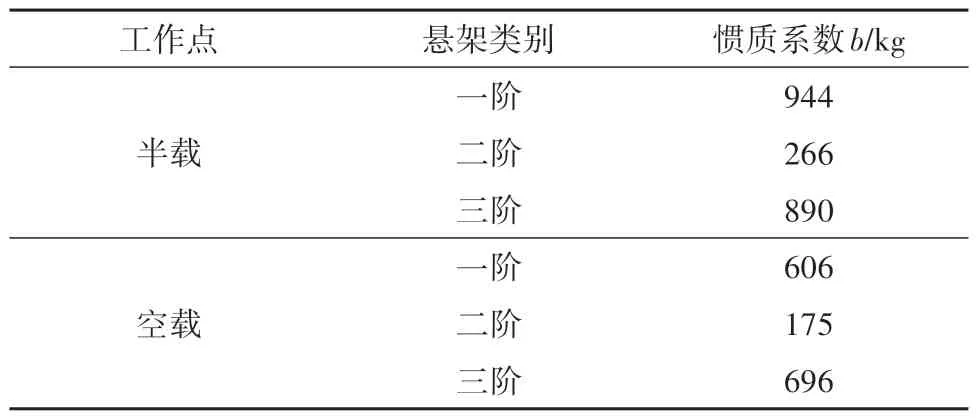
表3 半载和空载工作点悬架系统参数Table 3 Parameters of suspension system in half load and no load working points
2.4 悬架装配参数的确定
假设mn=300 kg和mf=480 kg分别表示空、满载时车辆的簧载质量,x0n和x0f分别表示空、满载时忆惯容器活塞的位移初始值,Ln和Lf分别表示空、满载时忆惯容器的静平衡位置,w为忆惯容器的活塞宽度。
根据胡克定律,结合一阶忆惯容器悬架结构,空、满载时忆惯容器的静平衡位置之差Lf−Ln可表示为:

式中,g为重力加速度,ks为悬架主弹簧刚度。
将mn=300 kg,mf=480 kg和ks=22 kN代入上式,可以求解得Lf−Ln=0.08 m。
结合式(19)和式(25),空、满载时忆惯容器的等效惯质系数为
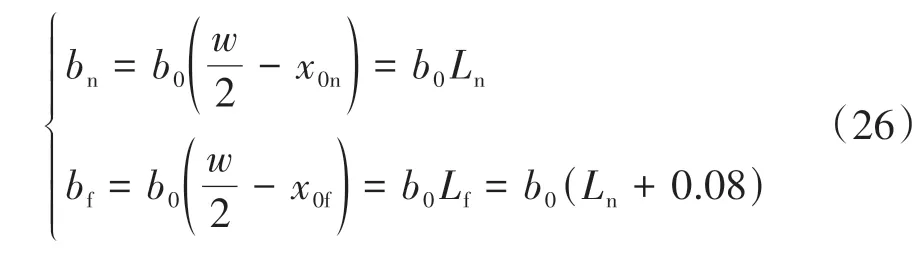
根据参数优化结果可知车辆空、满载时的等效惯质系数bn=606 kg,bf=1 275 kg,将bn和bf代入式(26),即

求解获得忆惯容器的惯质常数b0=8 362.5 kg/m和空、满时忆惯容器的静平衡位置Ln=0.072 m 和Lf=0.152 m。
设置忆惯容器活塞宽度w为0.14 m,将w、Ln和Lf代入式(26),即

求解得忆惯容器空、满载的初始位移x0n=-0.002 m 和x0f=-0.082 m。
用相同的方法分别求出二阶和三阶忆惯容器悬架中忆惯容器的装置参数,见表4。

表4 各阶忆惯容器悬架中忆惯容器装置参数Table 4 Parameters of mem-inerter device in each order meminerter suspension
3 忆惯容器悬架的载荷适应性分析
忆惯容器悬架相较于传统线性悬架,最大的优势在于忆惯容器可以等效于一种采取初始位移控制策略的半主动惯容器,从而使忆惯容器悬架具有载荷适应性。为更好地研究3种忆惯容器悬架的载荷适应性,分别将车辆满载、半载、空载下的线性惯容器悬架作为比较对象,进行仿真分析。车辆的满载簧载质量设为480 kg,空载簧载质量设为300 kg,非簧载质量设为45 kg。
以一阶忆惯容器悬架为例,忆惯容器悬架参数如表4所示,线性惯容器悬架除惯容器外的其他元件参数和忆惯容器悬架参数一致,满载、半载和空载下的线性惯容器的惯容值分别为1 275、944、606 kg。
设置路面输入为正弦速度激励v=Asin(2πft),其中,振幅A=0.05 m,频率f=0~15 Hz,通过仿真可绘制出一阶忆惯容器悬架和对应的半主动惯容器悬架的车身垂直加速度、悬架动行程和车轮动载荷增益曲线图,如图5所示。可以看出,无论激励的频率和车辆载荷如何变化,忆惯容器悬架和相应的线性惯容器悬架的各响应增益都十分接近,说明忆惯容器悬架具有良好的载荷适应性,有利于提升车辆在不同载荷下的行驶平顺性。
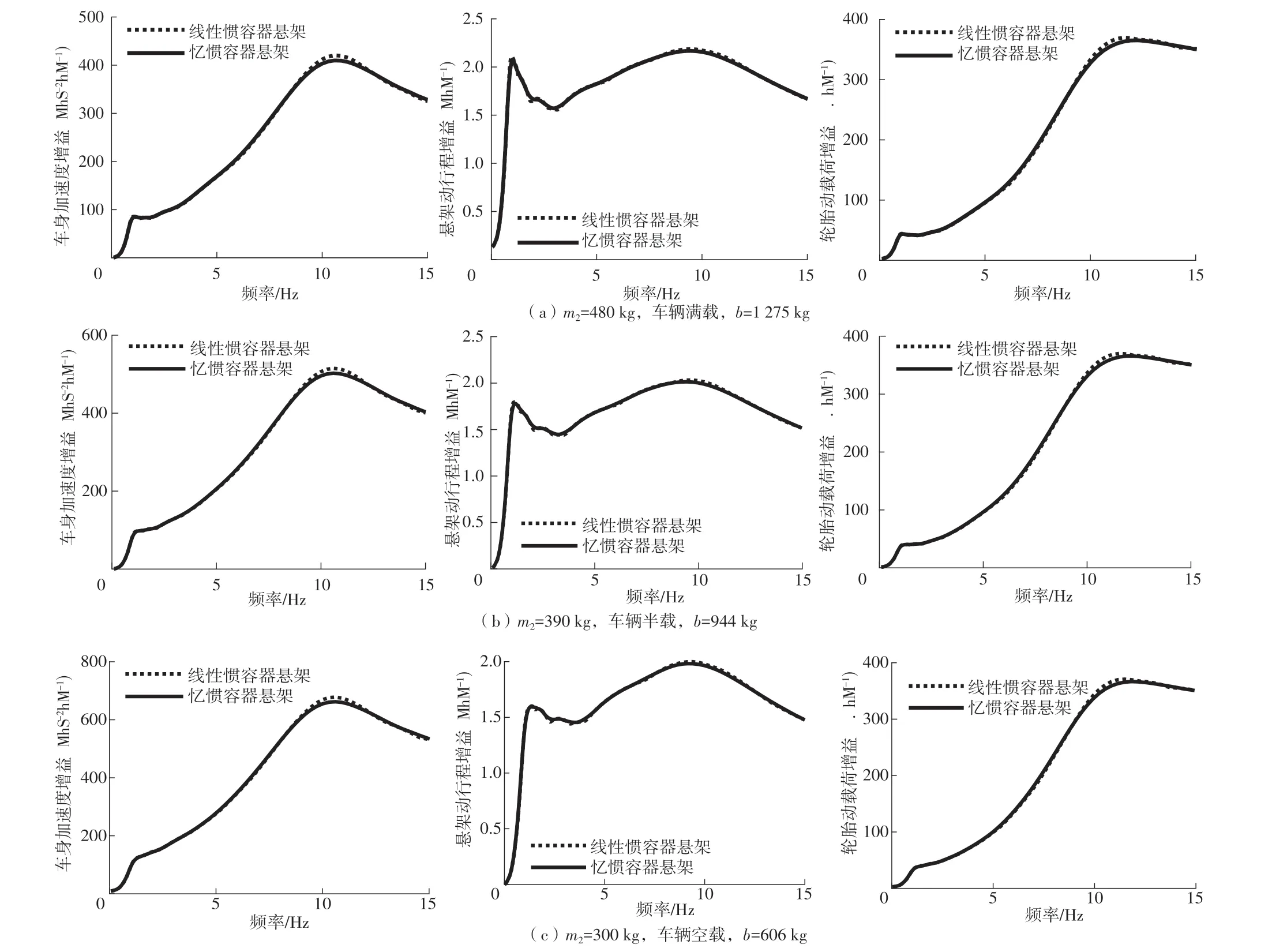
图5 一阶忆惯容器悬架响应增益Fig.5 Response gain of first order mem-inerter suspension
运用同样的方法对二阶忆惯容器悬架和三阶忆惯容器悬架进行仿真。路面输入同之前一致,二阶忆惯容器悬架参数如表4所示,二阶线性惯容器悬架中的惯容器惯容值分别为360、266 和175 kg。三阶忆惯容器悬架参数如表4所示,三阶线性惯容器悬架中的惯容器惯容值分别为1 075、890 和696 kg。图6 和图7 分别为二阶悬架和三阶悬架的车身加速度、悬架动行程和轮胎动载荷增益对比图。
从图6 和图7 中可以看出,在各种载荷及频率下,二阶、三阶忆惯容器悬架和对应的线性惯容器悬架的增益曲线图几乎重合,说明二阶和三阶忆惯容器悬架在不同载荷下都能保证良好的隔振性能,具有良好的载荷适应性。

图6 二阶忆惯容器悬架响应增益Fig.6 Response gain of second order mem-inerter suspension
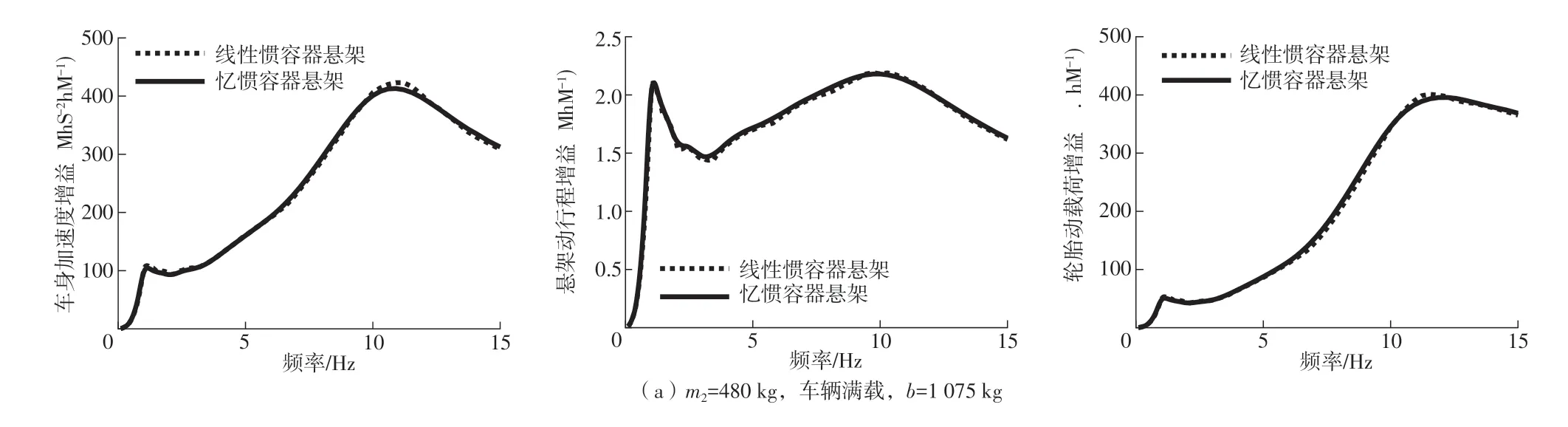

图7 三阶忆惯容器悬架响应增益Fig.7 Response gain of third order mem-inerter suspension
综合以上分析,3种忆惯容器悬架在不同载荷下都具有良好的隔振性能,有利于提升车辆在不同载荷下的行驶平顺性,具有良好的载荷适应性。也证明了本研究提出的忆惯容器非线性悬架系统的网络综合设计方法达到了改善悬架载荷适应性的目标。
4 忆惯容器悬架性能的仿真分析
为了验证忆惯容器悬架的性能优势,本节分别将各阶忆惯容器悬架结构与对应结构的传统线性ISD悬架进行仿真对比。
本节的仿真分析中,车辆的满载簧载质量设为480 kg,空载簧载质量设为300 kg,非簧载质量设为45 kg。为了尽可能地接近悬架的实际工作场景,设定激励为随机路面输入,其中路面的输入模型可表达为下式[23]:

式中,f0,λ(t)和G0分别表示截止频率、积分白噪声和路面不平度系数,t表示时间。车辆前进速度v为20 m/s,路面不平度系数G0为5×10-6m3。
设置线性悬架中惯容器的惯质系数和满载时忆惯容器的等效惯质系数相同,悬架的其余仿真参数与前文一致。一阶、二阶和三阶忆惯容器悬架在车辆满载、半载和空载时的时域响应如图8-图10所示,计算出随机响应输出的均方根值如表5-表7所示。

图10 三阶忆惯容器悬架随机激励时域响应Fig.10 Time domain random response of third order mem-inerter suspension
由于线性惯容器悬架中惯容器的惯质系数全部设定为满载工况下的忆惯容器的惯质系数,因此可以看到在满载工况下线性惯容器悬架和忆惯容器悬架的车身加速度和轮胎动载荷的均方根值均非常接近,几乎相等。而在半载和空载工况下,忆惯容器悬架都表现出了明显的性能优势。
由图8和表5可知,一阶忆惯容器悬架在半载和空载下的车身加速度均方根值和轮胎动载荷均方根值均比线性惯容器悬架有所降低,且空载时优化效果更加明显,分别达到了14.8%和15.0%的峰值,表明一阶忆惯容器悬架有利于改善车辆的乘坐舒适性和轮胎附着能力。悬架动行程均方根值也有了略微的减小,表明一阶忆惯容器悬架能更好地抑制振动。

图8 一阶忆惯容器悬架随机激励时域响应Fig.8 Time domain random response of first order mem-inerter suspension


表5 一阶悬架随机激励时域响应均方根值Table 5 RMS values of time domain random response of first order suspension
相对应地,从图9、图10以及表6、表7中可以看出,二阶和三阶忆惯容器悬架在半载和空载工况下也表现出了更佳的性能,并且空载性能表现更佳。二阶忆惯容器悬架在空载下的车身加速度和轮胎动载荷均方根值的降幅分别为19.8%和15.2%,三阶忆惯容器悬架则为22.1%和18.2%,均具有良好的减振效果。这也进一步证明了使用悬架网络综合方法设计的非线性忆惯容器悬架拥有良好的载荷适应性。
图9 二阶忆惯容器悬架随机激励时域响应Fig.9 Time domain random response of second order mem-inerter suspension

表6 二阶悬架随机激励时域响应均方根值Table 6 RMS values of time domain random response of second order suspension

表7 三阶悬架随机激励时域响应均方根值Table 7 RMS values of time domain random response of third order suspension
综上所述,在随机输入的条件下,相较于线性惯容器悬架,3 种忆惯容器悬架在车辆的半载和空载工况下,都能够改善车辆的轮胎接地性和行驶平顺性,尤其是在空载时,减振效果的提升更加明显,也进一步验证了忆惯容器悬架良好的载荷适应性。
5 结论
本研究通过能量法证明了等效惯质定理,该定理表明了忆惯容器具有对初始位移依赖的自适应性。基于该定理,提出了一种忆惯容器非线性悬架系统的网络综合方法,即通过阻抗综合法求解并设计了3种不同的忆惯容器悬架网络结构,运用悬架系统网络工作点综合方法确定忆惯容器悬架参数。分析结果表明,采用网络综合方法设计的忆惯容器悬架能够等效为具有初始位移依赖的可调惯容半主动悬架,具有良好的载荷适应性,能够提高车辆在不同载荷工况下的行驶平顺性。与传统线性惯容器悬架相比,在随机路面输入条件下,各阶的忆惯容器悬架均表现出了更好的行驶平顺性与操纵稳定性,具有明显的性能优势,表明悬架网络综合方法在忆惯容器非线性悬架的设计中是可行的。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
数学物理学报(2022年2期)2022-04-26
读者·校园版(2019年24期)2019-12-10
北京航空航天大学学报(2017年4期)2017-11-23
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
北京汽车(2016年6期)2016-10-13
现代制造技术与装备(2015年4期)2015-12-23
小朋友·聪明学堂(2015年8期)2015-11-30
国外科技新书评介(2014年12期)2015-01-05