
基于SE-ResNeXt网络的低信噪比LPI雷达辐射源信号识别
2022-11-19 06:53徐桂光王旭东胡国兵高涌荇罗泽虎
系统工程与电子技术 2022年12期
徐桂光, 王旭东,*, 汪 飞, 胡国兵, 高涌荇, 罗泽虎
(1. 南京航空航天大学电子信息工程学院/集成电路学院, 江苏 南京 211106;2. 金陵科技学院电子信息工程学院, 江苏 南京 211169)
0 引 言
低截获概率(low probability of intercept, LPI)雷达利用发射波形的特殊调制特征可防止被非合作截获接收机的截获和检测,在现代化战争中被广泛应用。
随着深度学习在计算机视觉、语音识别、文本理解等领域的广泛应用,国内外学者已将深度学习与时频分析应用于LPI雷达信号的特征提取与识别[1-6]。这些方法先将雷达信号转换为时频图像(time-frequency image, TFI),再用深度学习网络对TFI进行特征提取和辨识,已取得良好效果。
Zhang等[7]提出一种基于时频分析和卷积神经网络(convolutional neural network, CNN)的方法,实现了对8种LPI雷达脉内调制信号的识别;在信噪比(signal to noise ratio, SNR)为-2 dB时,对8种雷达信号的识别准确率达到94.5%。但是,该方法除Frank编码之外,并没有考虑LPI雷达中4种多相编码信号(P1~P4)。另外,由于低SNR下二进制相移键控(binary phase shift keying, BPSK)波形和T1编码在时频图上具有相似的特征,不利于识别。所以文中针对BPSK波形用了多个连续脉冲内的数据,而其他的波形数据都是采用单脉冲的,进而制造了不相似特征,这都限制该方法在实际中的运用。此外,输入格式和网络超参数与手写数字识别任务的参数相同,仅对全连接层进行了修改,且低SNR下使用二值化处理会导致TFI信息损失严重。郭立民等[8]提出基于栈式自编码器(stacked sparse autoencoder,sSAE)和时频分析的雷达信号识别算法,能够实现对8种常见LPI雷达信号的识别。虽然取得了较好的结果,但依旧没有考虑LPI雷达信号中易混淆的多相编码信号。Qu等[9]使用Cohen类时频分布、图像处理和卷积神经网络识别12种雷达调制信号。虽然在低SNR条件下,取得了很好的识别效果,但该方法仍以二值图像作为网络输入。叶文强等[10]结合降噪自编码器和卷积神经网络实现对6种常见雷达辐射源信号的识别,在SNR=-6 dB时,识别准确率超过80%。Qu等[11]使用图像处理方法抑制噪声,调整TFI的大小和振幅,将64×64 的TFI作为深度Q学习网络的输入层,在SNR较低时,可以识别8种随机重叠雷达信号。虽然文献[7-11]在提高雷达波形识别性能方面都取得了一定进展,但并没有充分研究低SNR条件下,TFI具有相似特征的LPI雷达信号识别问题。
针对上述问题,本文利用深度学习和时频分析研究低SNR条件下12类LPI雷达信号识别问题,包含BPSK,线性调频(linear frequency modulation, LFM),Costas,Frank,P1~P4和T1~T4[12]。首先进行时频分析和图像预处理抑制TFI中的噪声,剪除冗余频带。然后在ResNeXt网络[13]的基础上结合扩张卷积[14]和压缩激励(squeeze excitation, SE)结构[15],构建了SE-ResNeXt网络提取时频特征,并用于分类。网络中的扩张卷积扩大了神经元的感受野,SE结构增强了特征通道相关性,解决了低SNR条件下原有网络对时频特征提取不足的问题。
本文方法由3部分组成:信号预处理、特征提取以及信号分类。首先,通过Choi-Williams分布(Choi-Williams distribution, CWD)将LPI雷达波形转换为TFI。为了提高TFI的分辨率和降低网络的训练成本,对TFI进行灰度化、二维维纳滤波、图像裁剪和图像缩放等预处理操作。其次,训练SE-ResNeXt网络,对上述处理后的TFI进行特征提取。最后,将特征向量输入Softmax分类器[16],实现LPI雷达信号分类。
1 信号预处理
1.1 LPI雷达信号模型
工程中一般假设截获接收机收到的是高斯白噪声下的LPI雷达脉冲信号,可表示为
y(t)=Aej(2πf(t)t+φ(t))+n(t),0≤t≤T
(1)
式中:A为幅度;T为脉冲宽度;n(t)为加性高斯白噪声;f(t)和φ(t)分别为载波频率和相位函数,决定信号的调制类型。
1.2 CWD
由于Wigner-Ville分布中存在很强的交叉项,会掩盖LPI信号的调制特征。因此,使用CWD,采用指数核函数φ(υ,τ)抑制交叉项的同时使TFI保持较高的分辨率[17]。输入连续信号的CWD的表达式为
(2)
(3)
式中:ω为角频率变量;t为时间变量;x*(·)表示输入信号的复共轭;ε>0是缩放因子,本文选取ε=1平衡交叉项抑制和时频分辨率的矛盾。当SNR=10 dB时,12种LPI雷达信号的CWD时频分布如图1所示,对于不同调制类型的信号有不同的TFI特征差异。LFM的TFI是直线型;Costas的TFI归一化频率数与调制频率数相等;BPSK在相位跳变时,时频能量聚集处也会跳变,呈现“<”形状;多时编码(T1~T4) 中,T1和T3码的TFI具有“<”形状,T2和T4码的TFI具有“X”形状;多相编码(Frank,P1~P4)中,Frank、P1和P2码的TFI为阶梯型,P3和P4码的TFI为直线型。随着SNR降低,多相编码信号和LFM信号的阶梯状和线状的时频特征有所减弱,BPSK和T1,T2码和T4码的TFI较为相似,识别时容易产生混淆。

图1 12类雷达信号的CWD
1.3 二维维纳滤波
虽然CWD可以抑制交叉项,但TFI中仍然分布有大量噪声,这些噪声会影响后续的识别效果。因此,需要减小噪声干扰,二维维纳滤波是一种自适应滤波器,能依据图像的局部方差来调整滤波器的效果,对白噪声有较好的滤波效果[18]。
假设用矩阵Mm×n表示m×n个像素的灰度时频图像,M(i,j)表示每个像素点,i=1,2,…,m,j=1,2,…,n。ηa×b是图像Mm×n中每个像素点的a×b局部邻域,ηa×b的大小一般设置为40×40[9]。每个像素的邻域均值μ和方差σ2,维纳滤波后的图像Q(i,j)计算如下:
(4)
(5)
(6)
式中:v2是噪声方差,可使用所有邻域估计方差的平均值表示。
1.4 图片裁剪和尺寸调整
经过二维维纳滤波,TFI已经较大地抑制了噪声,为了突出LPI雷达信号不同调制类型之间的差异,本文采用基于边际频率分布的图像裁剪方法去除冗余区域。然后通过双线性插值将裁剪后的图像尺寸调整为224×224。具体步骤如下。
步骤 1对原始TFI进行平滑处理
如图2所示为SNR=-8 dB时,T1信号维纳滤波前后的TFI。可以看出,二维维纳滤波对TFI中的高斯白噪声有较好的滤除效果。
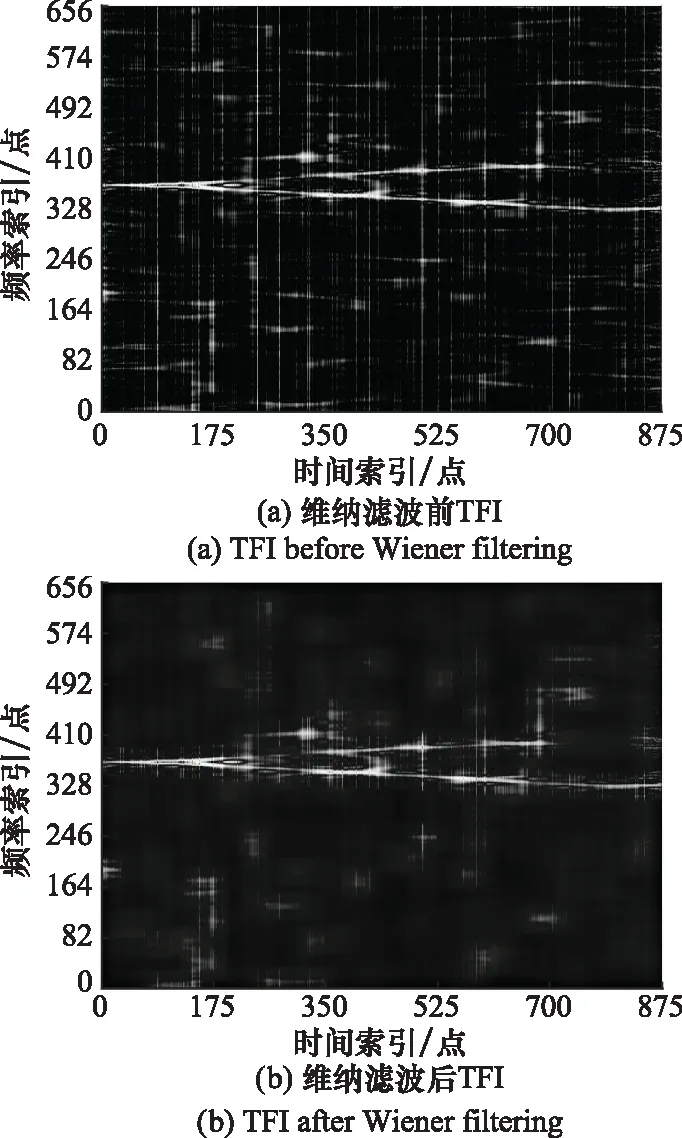
图2 维纳滤波的效果
步骤 2确定TFI的边际频率分布
对二维维纳滤波后的TFI,采用边际频率分布确定TFI中包含调制能量的区域[19]。将信号的瞬时能量看作频率的函数,边际频率分布表示为
(7)
将二维维纳滤波后的TFI中每个频率点ω在时间轴上分布的N点值相加,并进行归一化处理。T1信号的归一化边际频率分布图如图3所示。
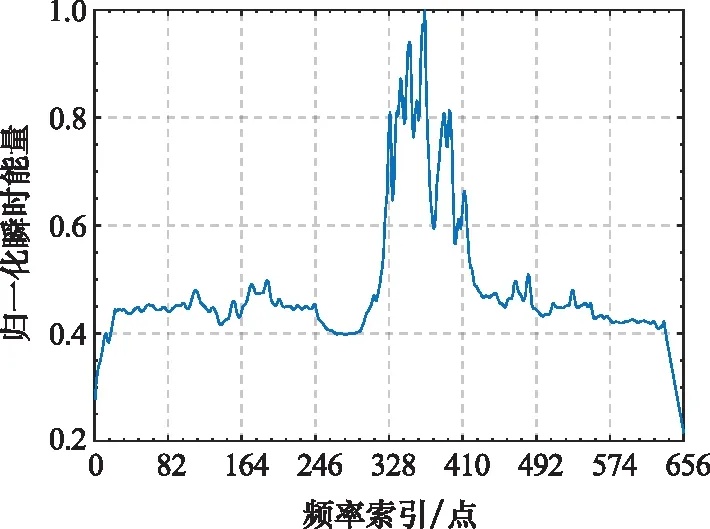
图3 T1信号归一化边际频率分布
步骤 3确定调制能量分布的有效区间
通过对归一化的边际频率分布生成包含100个分组的直方图,选取能产生最佳分类概率的分组号r确定为第一次检测门限。然而在低SNR下,即使没有信号分布也会有超过检测门限的情况。并且在r较大时,也有信号分布低于门限的情况。所以采用“二次门限”,即边际频率连续超过门限θ次才认为有信号,连续低于门限λ次时才认为无信号,从而确定调制能量分布的有效区间[20]。本文选取r=45,θ=λ=3。T1信号的归一化边际频率分布直方图如图4所示。

图4 T1信号的归一化边际频率分布直方图
步骤 4裁剪TFI中的信号主成分图像
确定TFI中有效信息区域的起始和终止位置后,对TFI进行截取。当SNR=-8 dB时,截取图3(b)中的主成分图像,如图5所示。
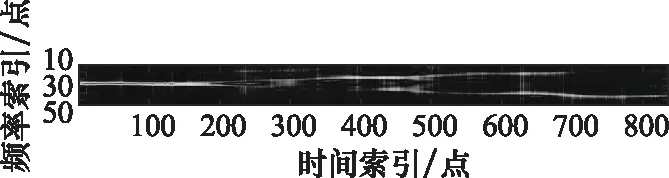
图5 T1信号的TFI主成分图像
步骤 5图像尺寸调整
为了减少网络的训练成本,通过双线性插值将图5的图像尺寸调整为224×224,如图6(a)所示。在低SNR条件下,易混淆的T1和BPSK信号TFI经过上述预处理后能更好地体现时频特征差异,便于后续特征提取,如图6(a)和图6(b)所示。
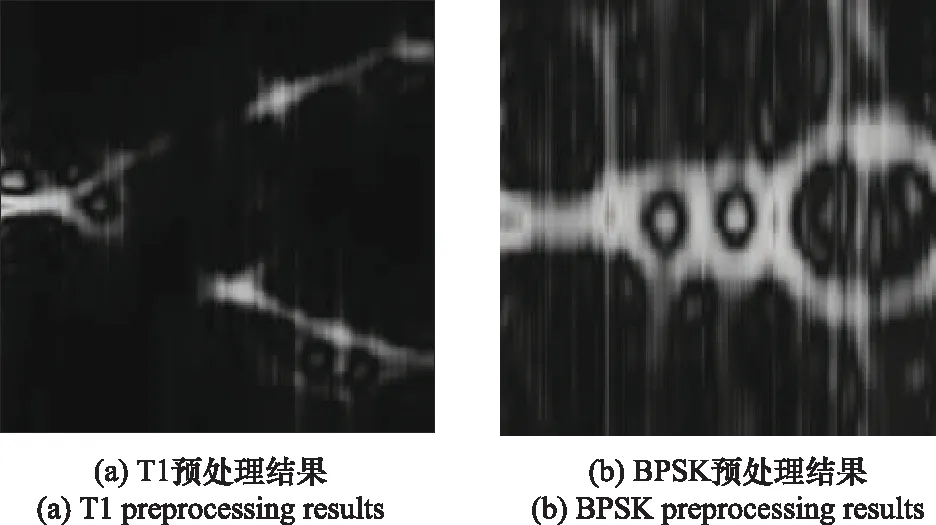
图6 TFI预处理结果
2 特征提取及信号分类
2.1 ResNeXt块结构
ResNeXt结合了ResNet[21]和Inception[22]的思想,既避免了由网络层数过深带来的梯度消失问题,又无需设计复杂的Inception结构。同时,将瓶颈结构扩展成分支结构,每条支路都遵循相同的拓扑结构。ResNeXt块结构的输出为
(8)
式中:x为输入;y为输出;L为拓扑结构;G为分支数量。图7为ResNeXt块结构的等效变换,用分组卷积替换分支结构,图中每层的参数表示格式为:输入通道数,卷积核尺寸,输出通道数。
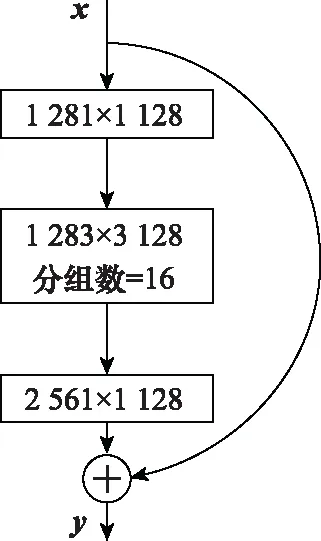
图7 ResNeXt块的等效结构
2.2 SE结构
Hu等从通道维度提出SE结构[15]。通过SE结构获取每个特征通道的权重,然后依照权重去提升有用的特征,从而抑制对当前任务用处不大的特征,SE结构如图8所示。SE结构首先对卷积和池化后得到的特征图U∈RH×W×C(H,W,C分别代表高度、宽度和通道数)进行全局平均池化(global average pooling,GAP),输出维度为1×1×C的全局平均特征,称为压缩操作。然后,将全局平均特征送入两级全连接(full connection,FC),线性整流函数(rectified linear unit,ReLU)[23]和Sigmoid函数[24],输出维度为1×1×C的通道权重向量,该过程称为激发。最后将通道权重与U相乘,得到特征图Z∈RH×W×C。
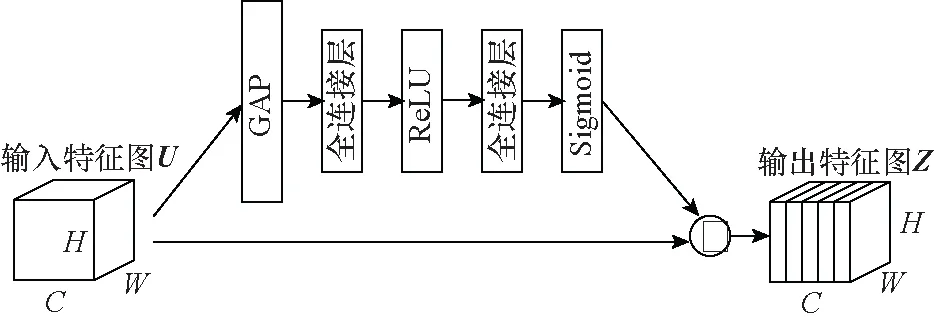
图8 SE结构
2.3 SE-ResNeXt网络结构
本文基于SEnet和ResNeXt来构建SE-ResNeXt网络,图9为网络的核心结构SE-ResNeXt块。图中输入为X,输出为Y,每个卷积操作由卷积、批量归一化(batch normalization,BN)[25]和ReLU组成。

图9 SE-ResNeXt块结构
SE-ResNeXt网络由1个卷积层、4个SE-ResNeXt块结构、2个池化层、1个全连接层和1个Softmax分类器构成,网络结构如图10所示。输入为经过预处理后的TFI,图像尺寸为224×224,通过SE-ResNeXt网络提取用于分类的特征向量,最后使用Softmax分类器进行分类。网络具体参数如表1所示,SE-ResNeXt块结构的操作和参数均列在方括号中。卷积后的参数表示卷积核尺寸、输入通道数、分组数。FC后面的括号中表示SE结构中两个全连接层的输出尺寸。
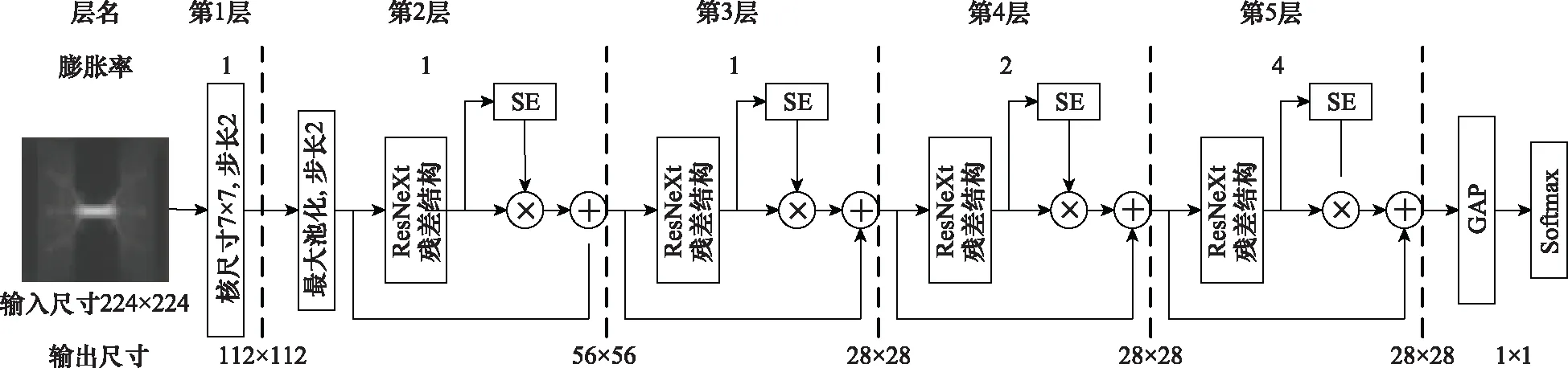
图10 SE-ResNeXt网络结构
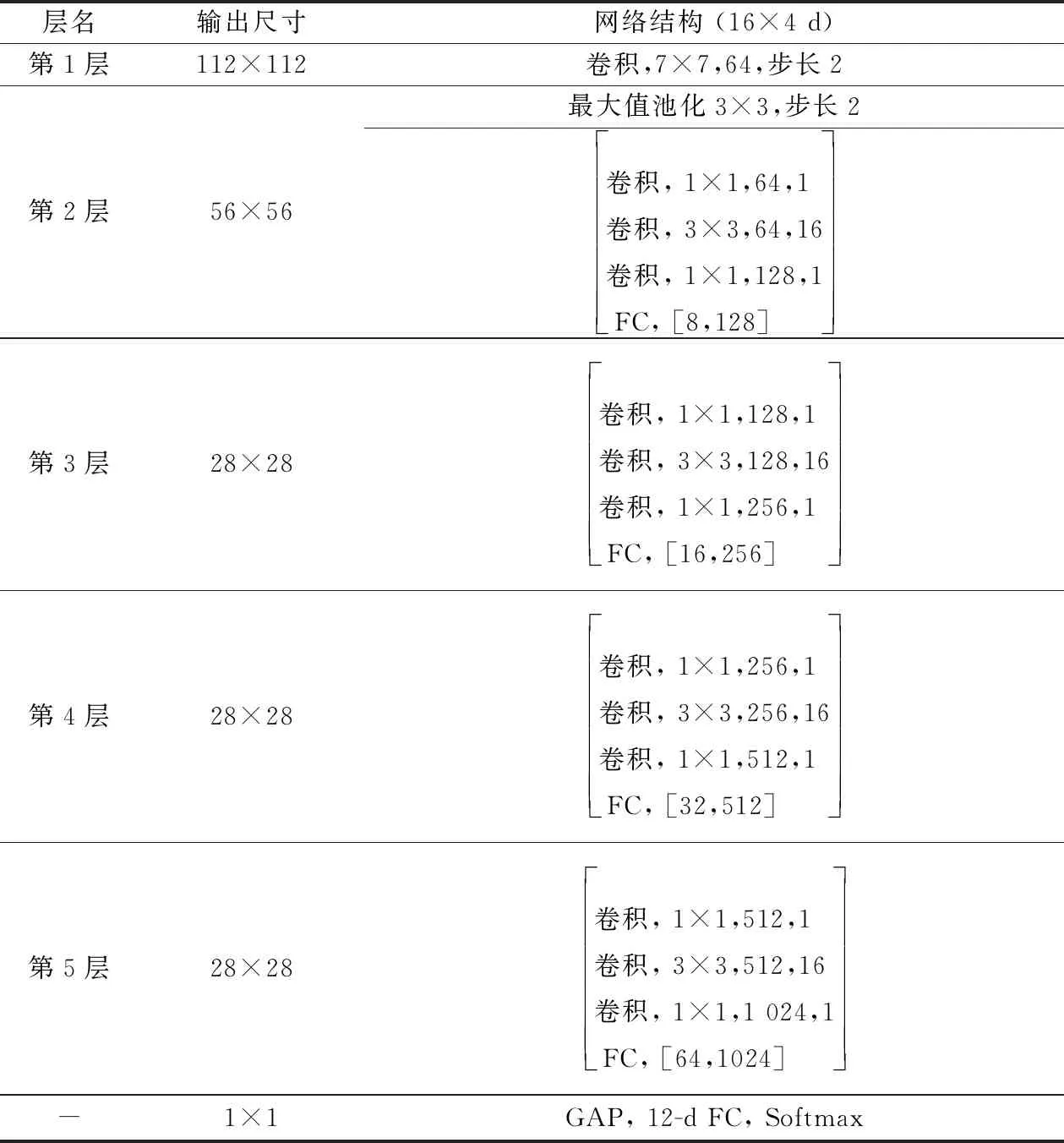
表1 SE-ResNeXt网络详细信息
3 实验结果与分析
3.1 网络训练
本文方法基于Pytorch[26]实现,优化器为自适应矩估计(adaptive moment estimation, Adam)[27],批次设置为128,训练迭代次数为90,初始学习率为0.03。当训练验证集的损失连续3次不再降低时,将学习率降低30%。为了节省不必要的训练时间、防止过拟合,采用提前停止技术,即将本轮迭代的损失和历史迭代最小损失值比较,如果历史最小损失减去本轮迭代的损失后大于阈值0.000 5,就认为损失函数减小了,并更新历史最小损失。当损失函数连续减小5次,就认为模型不再提升,停止训练并保存当前的模型参数。
3.2 实验配置
针对上述12种LPI雷达信号,在指定范围内随机设定信号的参数,并在信号中加入高斯白噪声。为了分析泛化能力,对于每种信号,训练集的SNR范围为-8 dB到8 dB,每隔2 dB产生200个信号,共21 600个样本。测试集的SNR范围为-10 dB到10 dB,每隔2 dB产生100个信号,共13 200个样本。
信号参数设置如表2所示,采样频率fs为归一化频率1,U(·)为均匀分布,信号的长度设置为1 024到2 048之间。
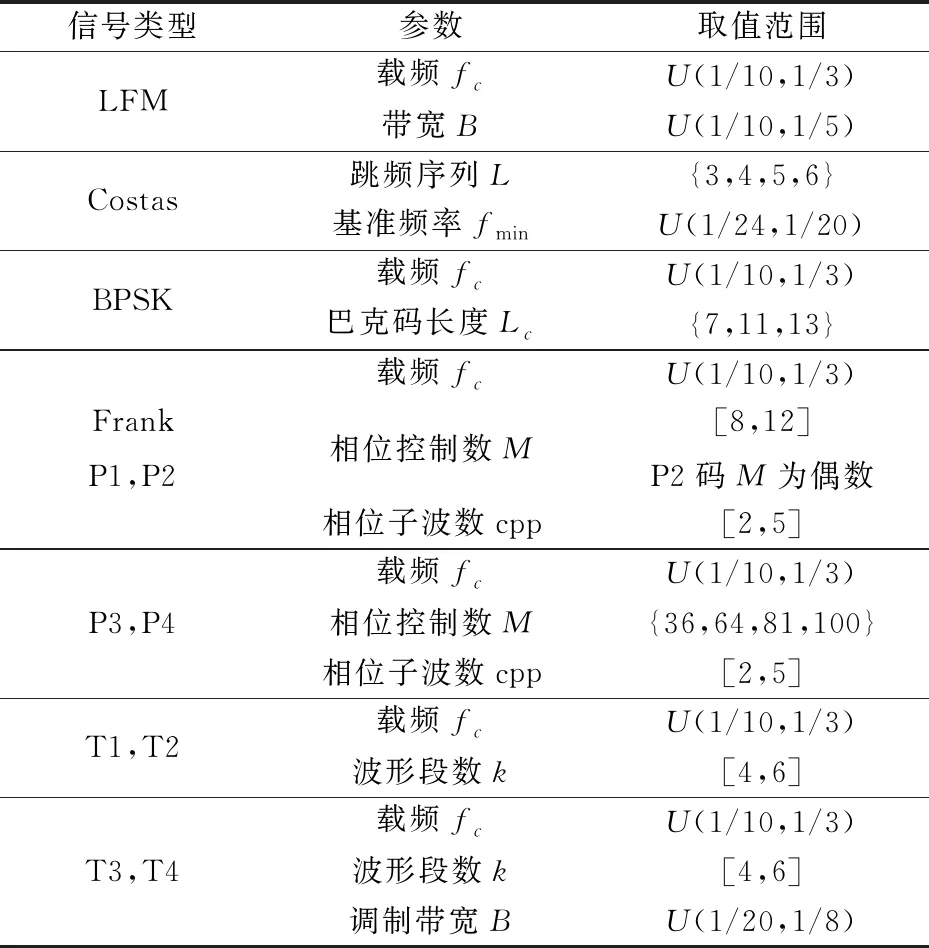
表2 LPI雷达信号仿真参数
3.3 不同预处理方法的识别效果
下面比较不同预处理操作对识别正确率的影响。Qu等将维纳滤波后的TFI进行二值化和缩放处理,提高了识别效果,但低SNR条件下二值化图像信息丢失严重,导致分类准确率较低[9]。本文方法在提取TFI主成分区域和尺寸调整后,降低了噪声干扰,消除了雷达信号在TFI中频率维的位置差异,以灰度图像作为SE-ResNeXt网络的输入,可完整保留信号的时频分布特征。将不同预处理后的数据在SE-ResNeXt网络中进行训练,整体识别率如图11所示。为验证本文提取主成分区域方法对识别正确率的提升,将维纳滤波后的TFI也作为网络输入进行对照。仿真结果表明,在不同SNR条件下,本文预处理方法对LPI雷达信号的整体识别正确率高于其他同类预处理方法。特别是在SNR=-8 dB的较低SNR时,12类LPI雷达信号的整体识别准确率依然能达到98.08%。
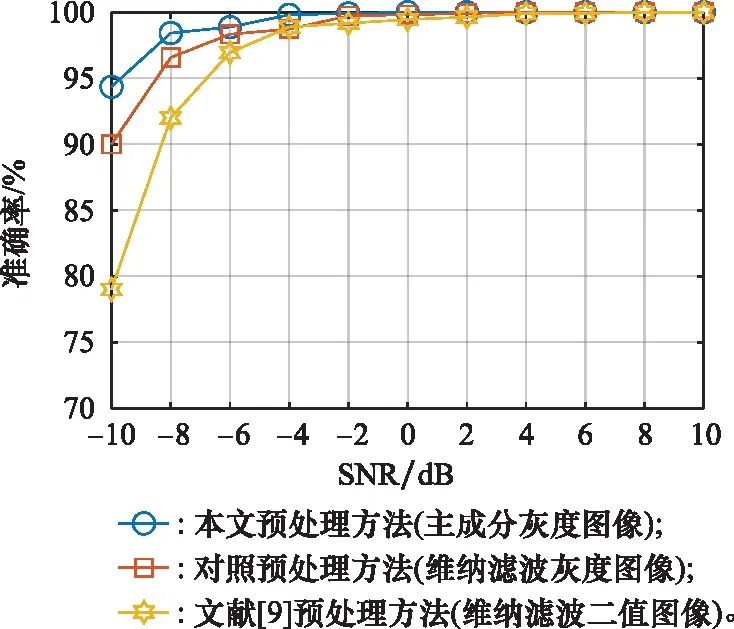
图11 不同预处理方法识别准确率对比
3.4 不同方法识别性能对比
本节测试了基于主成分TFI加SE-ResNeXt网络的识别性能,并与CWD-CNN方法[9]、CWD-扩张残差网络(dilated residual network, CWD-DRN)方法[28]和CWD-ResNet方法[29]进行对比。CWD-ResNeXt作为对照方法以验证SE结构和扩张卷积对ResNeXt识别性能的改善。其中文献[9]利用CNN提取维纳滤波后的二值时频图像特征,文献[28]和文献[29]采用灰度化,开运算和双三次插值的预处理操作,再分别使用DRN和ResNet进行特征提取,最后都使用Softmax分类器实现LPI雷达信号分类。图12为5种方法对12类LPI雷达信号的整体准确识别率。
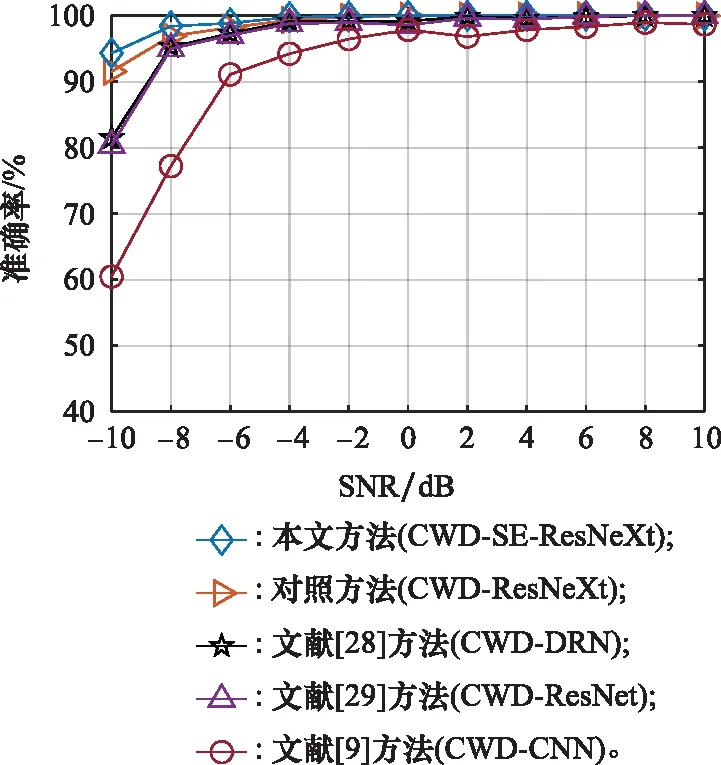
图12 5种方法在不同SNR下的性能比较
由图12可知,当SNR>-2 dB时,除文献[9]以外的4种方法的识别准确率都超过了97%。随着SNR的降低,CWD-CNN、CWD-DRN和CWD-ResNet方法的识别曲线明显下降。当SNR=-8 dB时,本文提出的方法仍能达到98.08%的识别准确率,比CWD-CNN、CWD-ResNet、CWD-DRN和CWD-ResNeXt分别高出20.86%,4.98%,4.09%和1.03%。同时,当SNR=-10 dB时,对于未参与训练的测试数据,本文所提出的方法仍能取得较高的识别准确率,说明泛化能力明显优于其他方法。
为了更好地理解上述4种方法的识别性能,分别从每个方法的测试数据集(SNR=-8 dB)中每类选取90个样本,并使用t分布随机近邻嵌入(t-distribution stochasticneighbor embedding,t-SNE)算法[30]将CNN、ResNet、DRN、SE-ResNeXt提取的特征投影到二维平面上,如图13所示。不同的颜色和形状代表数据集中的12类LPI雷达信号,由于对提取的特征进行t-SNE运算可以反映信号之间的相似信息,所以图13中具有相似特征的LPI信号在特征空间中相互接近。
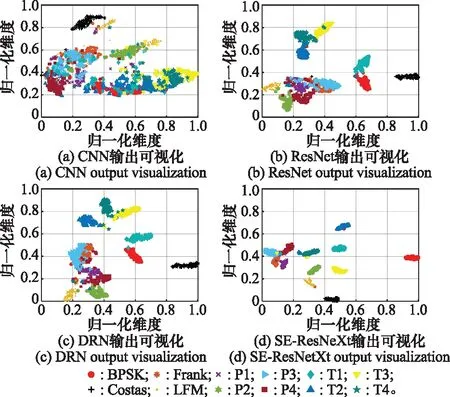
图13 t-SNE可视化4种方法输出(SNR=-8 dB)
由图13(a)可知,文献[9]中经过维纳滤波后的二值化图像信息丢失严重,最后用于分类的特征图大小仅为5×5,导致低SNR条件下,分类准确率下降明显。文献[28]和文献[29]中预处理后的TFI虽然保留了完整的时频信息,但是受到冗余频带噪声和位置分布干扰,导致4组(LFM和P2,Frank、P1、P3和P4,BPSK和T1,T2、T3和T4)容易混淆的信号在二维平面中分布较近,分别如图13(b)和图13(c)所示。本文方法提取的特征具有更强的识别能力,如图13(d)所示,不同类别信号间具有更好的分离度,同类别信号间具有更好的紧凑度,得益于3个方面:① 通过预处理消除TFI中的噪声和冗余频带干扰;② SE-ResNeXt网络利用多尺度结构提取TFI的特征;③ 通过SE结构强化有用通道特征和扩张卷积维护图像分辨率。图14显示了12种LPI雷达信号在不同SNR下的识别准确率。由图14可知,随着SNR降低,本文方法依然表现出更优越的识别性能。
图15为在SNR=-8 dB条件下,本文方法的混淆矩阵。由图15可知,12种LPI雷达信号都有很高的识别率,识别错误主要发生在P1和P4码、P3和Frank码两组信号,因为低SNR下,P1和Frank码的TFI中的阶梯特性变得模糊甚至消失,导致信号之间的混淆。

图15 混淆矩阵(SNR=-8 dB)
4 结 论
本文提出了一种基于时频图像预处理和SE-ResNeXt网络的LPI雷达信号识别方法。首先通过特定的预处理流程消除雷达信号在时频图上噪声干扰和频率维的位置差异,降低特征维度。然后在ResNeXt基础上,引入了扩张卷积和SE结构思想,强化了网络感受野和特征通道的相关性。具有在较低SNR环境下识别12种LPI雷达信号(BPSK、Costas、Frank、LFM、P1、P2、P3、P4、T1、T2、T3和T4)的工程应用价值。实验结果表明,当SNR低至-8 dB时,该方法对12种典型LPI雷达波形的整体识别正确率依然可达98.08%,与现有方法相比具有更好的低SNR适应能力、更强的抗混淆能力。
猜你喜欢
温州大学学报(自然科学版)(2022年2期)2022-05-30
潍坊学院学报(2020年2期)2021-01-18
现代电子技术(2020年13期)2020-08-07
舰船电子对抗(2019年4期)2019-09-10
太原科技大学学报(2019年3期)2019-08-05
宇航计测技术(2018年3期)2018-09-08
哈尔滨理工大学学报(2018年6期)2018-02-13
制导与引信(2017年3期)2017-11-02
计算机应用与软件(2017年3期)2017-04-14
舰船科学技术(2015年8期)2015-02-27
