仿生角加速度传感器设计及传感特性研究
2022-11-18 04:54:32陆施恩李文康边义祥姜亚妮
压电与声光 2022年5期
王 智,陆施恩,李文康,边义祥,姜亚妮
(扬州大学 机械工程学院,江苏 扬州 225127)
0 引言
内耳(又称迷路)由骨迷路和膜迷路构成,位于颞骨岩部,其结构复杂,其中内耳膜迷路的膜半规管是人体感知角位移运动的重要器官。膜半规管包括前膜半规管、外膜半规管和后膜半规管,3个半规管直接与椭圆囊相连,相互接近垂直。各自的膨大称为壶腹,其内壁的隆起称为壶腹嵴。壶腹帽盖在壶腹嵴上,它是由支持细胞分泌的糖蛋白所组成的胶状物[1]。当膜半规管随人体进行旋转运动时,内淋巴由于惯性作用会进行相对半规管的流动,促使壶腹帽变形,经壶腹嵴中纤毛感知细胞转换为神经信号,引起人体对旋转运动的感知[2]。
近年来对人体前庭系统传感器的研究方案主要分为两种:
1) 利用现有的传感技术和信号处理技术,设计制备出与人耳壶腹嵴感知功能类似的模型,从功能的角度对人体半规管进行探究[3-5]。
2) 通过模仿人耳半规管的生理结构,从内外部结构入手,制备出与人体器官外观相似、功能相近的仿生壶腹嵴,并对其进行实验探究[6-7]。
基于对半规管内部结构和工作机理的仿生设计,提出了一种角加速度传感器的制备方法。人体半规管系统中最关键的感受器是壶腹嵴胶顶中的感知纤毛细胞。由于壶腹嵴胶顶尺寸较小,且胶顶在运动变形过程中对传感器柔性存在一定要求,故选用表面对称电极含金属芯聚偏二氟乙烯(PVDF)纤维(SMPF)代替纤毛细胞作为仿生半规管中的感觉器官。
在传感器系统中,仿生膜半规管管壁及内淋巴部分保持其机械属性与人体一致,SMPF纤维输出电荷可以反应壶腹嵴胶顶结构的受力变形结果。该角加速度传感器在几何尺寸、内部结构和工作原理上与人体半规管基本一致,频率响应特性与人体接近,因此适用于人体运动感知,同时基于传感器结构参数,可进一步应用于前庭系统相关病理学说[8]的研究及治疗手段[9-10]的开发。
1 仿生角加速度传感器的设计制备
1.1 含SMPF纤维传感器制备
人耳壶腹嵴纤毛感知细胞在感知壶腹嵴胶顶变形时,向神经传入纤维输出电信号,基于其结构特点和工作机理,选用SMPF纤维传感器[11]作为角加速度传感器信号发生器官,如图1(a)所示。该仿生纤毛传感器主要由金属芯、PVDF和表面对称电极构成。其制备过程如下:
1) 采用熔融纺丝法,将PVDF融化后均匀包裹在直径为∅0.08 mm的金属丝表面,冷却后得到含金属芯的PVDF纤维。
2) 在PVDF层两侧涂镀导电银漆,作为对称电极。
3) 通过极化处理增强了对称电极区域的压电性能,最后通过金属丝引出SMPF的两个对称电极,获得SMPF纤维传感器。
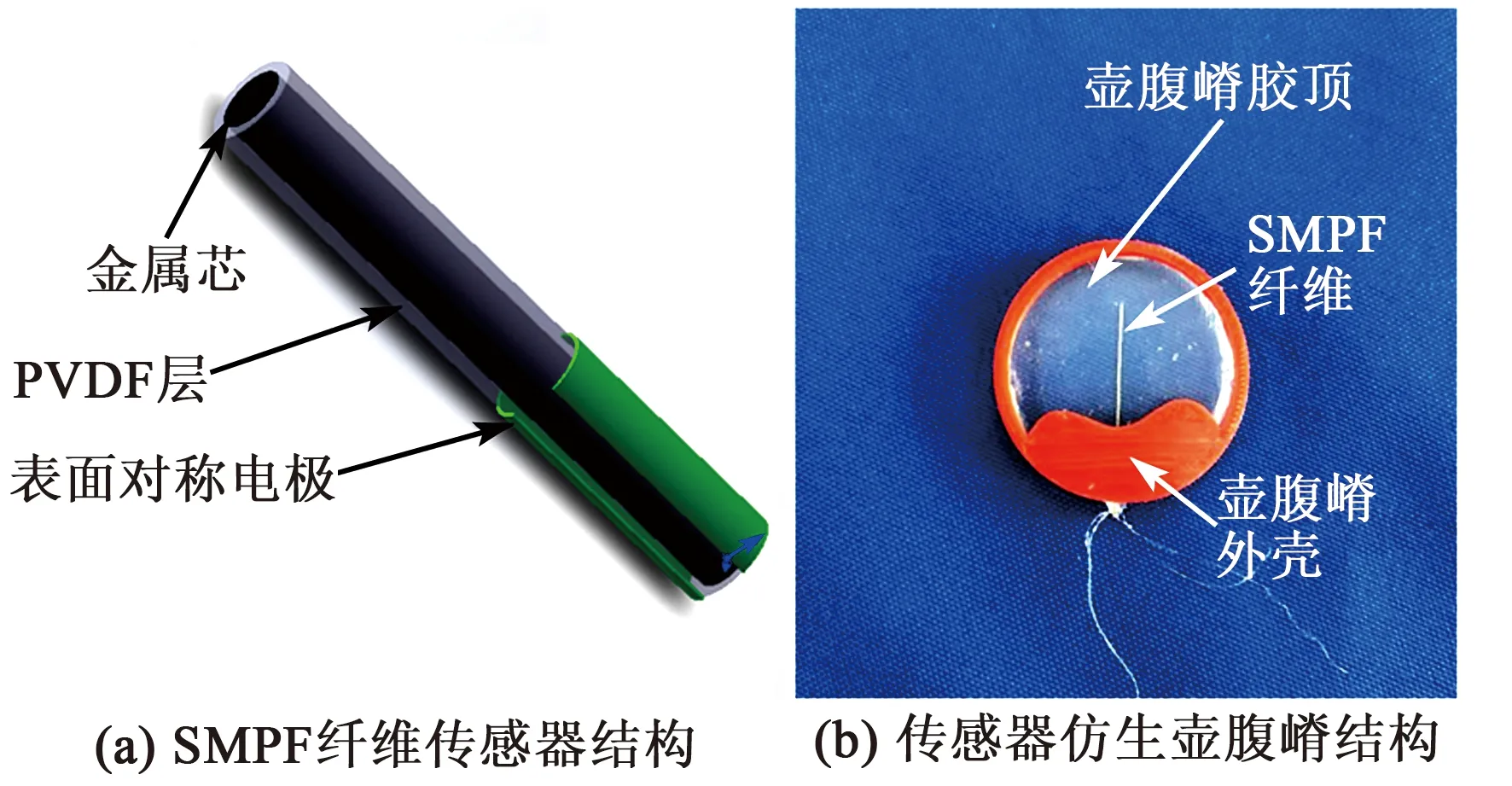
图1 SMPF纤维传感器结构及传感器仿生壶腹嵴结构
模仿人体壶腹嵴胶顶结构,用弹性硅胶薄膜代替人体壶腹嵴胶顶,3D打印的刚性外壳作为传感器膜半规管部分外壳。与人体感知纤毛细胞一致,SMPF纤维传感器底部固定在刚性外壳中,并引出金属丝输出电信号;纤维主体部分被绝缘橡胶包裹,保证纤维传感器与仿生半规管内淋巴(水)隔离,同时壶腹嵴薄膜的变形能促进纤维变形,以便产生电信号。
1.2 仿生半规管系统的设计制备
虽然内耳解剖复杂,显示困难,但通过影像学的重建技术,可清晰显示内耳的结构、形态、空间方向,重建其三维模型[12-13],且伴随3D打印技术与材料的发展,对膜半规管内部复杂内腔的一体化制备变得可行。人体半规管的各项物理尺寸如表1所示。
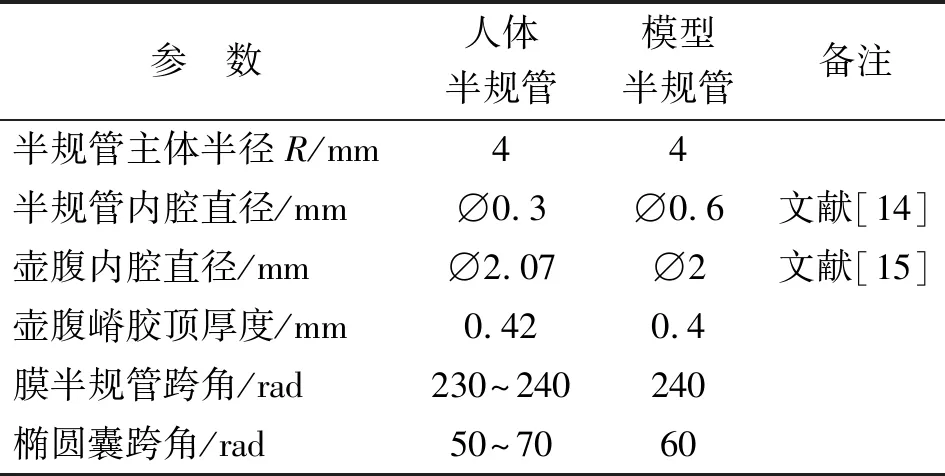
表1 仿生半规管模型尺寸
传感器内壁采取了与人体生理结构近似1∶1的比例关系,以及更贴近生理结构的制备方法。其具体制备过程主要分为两部分:
1) 制备膜半规管细管部分。已知人体膜半规管的内径为∅0.3 mm,长度约为22 mm。由于半规管孔径尺寸过小,选取直径为∅0.3 mm的金属丝作为型芯,使用E610型硅橡胶等比例混合后,填充至模具中固定。待硅橡胶凝固后,抽出金属丝,将硅橡胶从模具中挑出,得到内径∅0.3 mm的硅橡胶软管,如图2(a)所示。
2) 根据膜半规管壶腹部分的生理结构,设计制备传感器壶腹部分壳体。由于每个半规管都与椭圆囊相连,所以将椭圆囊列入此次制作的人工一维壶腹结构中,与人耳生理结构更相似。由于人体膜壶腹几乎充满骨壶腹的全部空间,导致膜壶腹的弹性有限,因此,该人工一维壶腹嵴的壶腹部分仍采用刚性结构,采取3D打印方式制备“壶腹-椭圆囊”刚性外壳装配体。将制备好的含金属芯壶腹嵴胶顶与人工壶腹完成装配,并以101胶进行密封,如图2(c)所示。
将步骤1)中的∅0.3 mm硅橡胶软管与步骤2)中的人工壶腹进行连接。由于人体内淋巴液机械属性与水接近[16],因此,本仿生模型选用水溶液代替内淋巴,分别向硅橡胶软管及人工壶腹两端注射水溶液。在水溶液浸泡环境下,将硅橡胶软管与人工壶腹两端连接,并用水下粘贴胶水密封连接处外壳。经过密封性检测后,仿生角加速度传感器实体如图2(d)所示。

图2 传感器壳体制备
1.3 仿生传感器的理论模型
分解人体三维半规管,取一个法平面内的半规管模型进行分析,如图3所示。

图3 半规管一维截面示意图
当一维半规管受到角位移刺激时,对其内部流体运动取运动微分方程:
(1)
(2)
(3)
f=2πρR2
(4)
Δp=KQc
(5)
式中:Qc为壶腹嵴体积位移,本模型中内淋巴体积位移与壶腹嵴体积位移相等;M为内淋巴质量系数;ρ为内淋巴密度;l为半规管弧长;Ad为细管横截面积;C为半规管阻尼系数;μ为内淋巴粘度;f为内淋巴角动量系数;R为半规管整体半径;ω为半规管角速度;Δp为壶腹帽两侧压力之差;K为壶腹帽的弹性系数。
式(1)可改写为

(6)
对式(6)进行拉普拉斯变换:
fsW(s)=Ms2Q(s)+CsQ(s)+KQ(s)
(7)
取:
(8)
(9)
(10)

(11)

当传感器受到匀加速角位移刺激时,取角速度为
W(t)=kt
(12)
对角速度进行拉氏变换,并将作为输入与传感器系统串联:

(13)
Q(s)=G(s)·W(s)
(14)
将式(14)代入Matlab做拉普拉斯反变换,求解得:
Q(t)=ilaplace(G(s)·W(s))
(15)
(16)
由式(16)可知,Q(t)与k成线性关系,由此说明,仿生传感器壶腹嵴偏移与系统角加速度成线性关系。
2 仿生传感器性能检验
2.1 人工一维壶腹嵴结构实验平台的搭建
仿生角加速度传感器的内部结构、工作机理及工作对象都贴近人体参数设计,因此,对传感器的性能检验同样需要模仿人体头部的旋转运动。由激振器配合齿轮、齿条装置,对仿生半规管输入正弦、阶跃角位移刺激。在半规管运动过程中,为排除附加直线加速度对壶腹嵴胶顶运动的影响,半规管主体平面法线及几何中心与齿轮旋转轴重合,整体实验装置如图4所示。系统输入角位移由激光位移传感器采集,SMPF输出信号经电荷放大器后由数据采集卡采集。

图4 实验系统搭建
2.2 实验结果与分析
2.2.1 传感器加速度感知特性
模拟人体头部在日常生活中的主要动作,如摆头和转向,对角加速度传感器分别输入正弦角位移刺激和冲击角位移刺激。通过激振器对齿轮齿条施加不同幅值的角位移信号(0.05~10 mm,频率固定为1 Hz),使半规管绕几何中心摆动。系统的输入(半规管角位移)由激光测距仪记录,如图5(a)、(c)所示。
齿条的位移数据(即齿轮旋转时对应的弧长)由激光位移传感器读取。经计算,单位弧长对应的半规管旋转弧度为0.034 5 rad/mm。将实验测得的位移数据通过Origin进行二次求导后得到旋转角加速度,并与该实验中SMPF的输出信号进行拟合,系统输出信号幅值与角加速度输入幅值的对应关系如图5(b)、(d)所示。

图5 系统的输入输出信号
SMPF的输出信号与硅橡胶膜的变形成线性关系[17]。通过正弦及冲击信号刺激,可以认为壶腹嵴胶顶变形与系统输入角加速度成线性关系,与二阶过阻尼扭摆模型结论一致。
2.2.2 传感器固有频率研究
角加速度传感器的固有频率对其工作过程中信号输出影响较大,因此,采用扫频实验确定系统固有频率。基于压电材料的传感特性及实验系统的负载能力,保持系统输入幅值不变(0.5 mm),对仿生半规管输入0.5~15 Hz的正弦刺激(人体常规运动频率约为0.5~5 Hz),并记录SMPF输出信号的响应幅值,得到仿生角加速度传感器的幅频响应特性,如图6所示。传感器系统的固有频率为11.6 Hz,对人体常规运动过程中的频率信号有较好的感知能力。
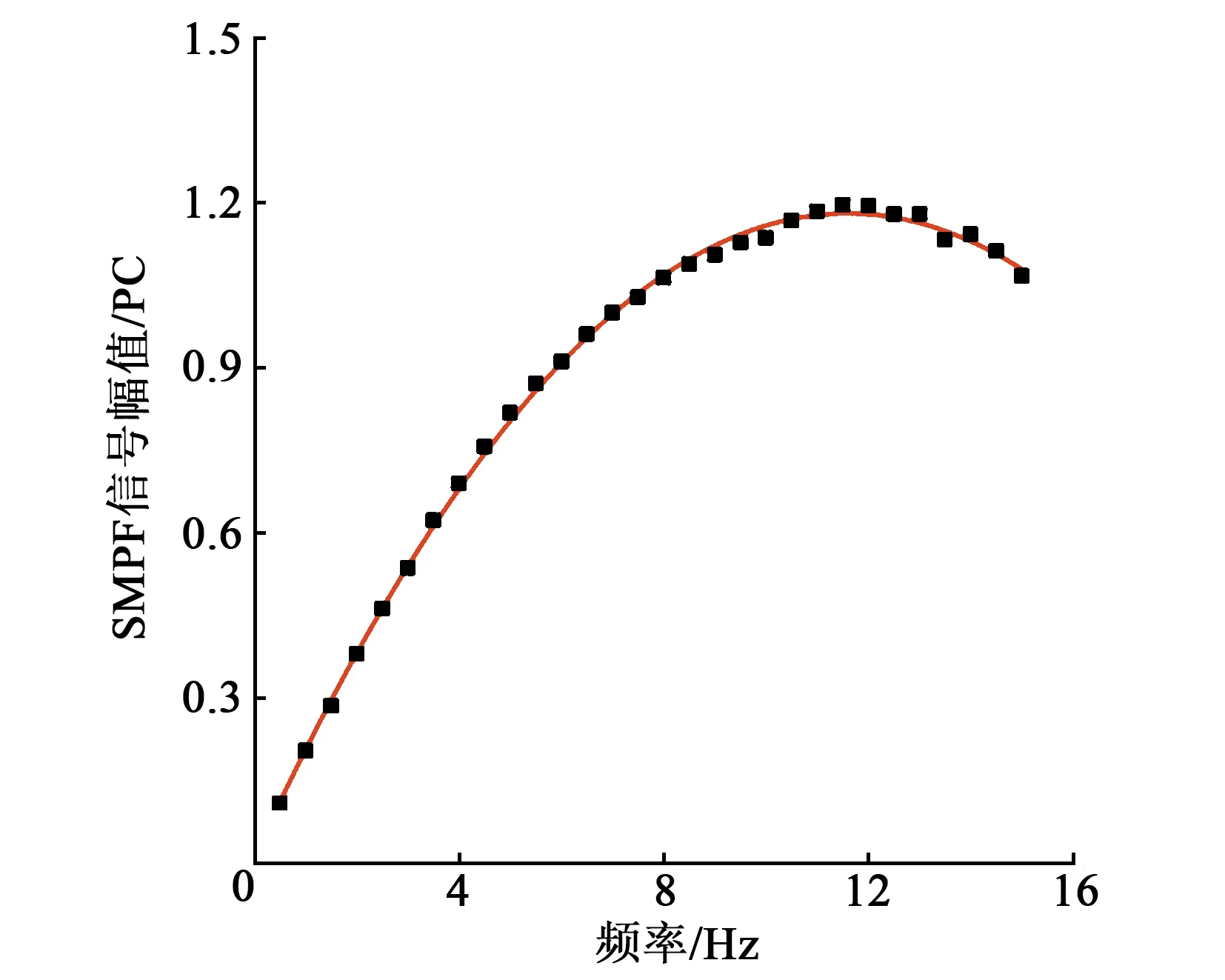
图6 SMPF信号输出与角位移输入频率对应关系
3 结束语
本文基于人体半规管仿生设计和SMPF压电纤维的应用,提出了一种仿生角加速度传感器的设计与制备方法,并基于传感器系统的制备及实验对其工作原理和性能进行检验。
在人体常规运动刺激下,传感器系统表现出对角加速度相对敏感[18],SMPF感知信号和系统输入角加速度呈线性关系,与二阶过阻尼系统模型推断相适应。
通过不同频率的正弦角位移刺激,测试摆头实验中半规管系统的频率特性。实验结果表明,仿生半规管传感器表现出的幅频特性与人体贴近。
基于1∶1仿生半规管的传感器系统,可以最大程度地还原人体半规管的工作性能,相信在未来的研究中,本传感器可用于各种前庭平衡性疾病的体外实验研究,通过测量SMPF壶腹帽结构的变形,以检验相关病理学说及治疗手段。
猜你喜欢
中国耳鼻咽喉颅底外科杂志(2021年3期)2021-07-06 02:58:42
机电信息(2021年17期)2021-07-01 05:14:00
中华耳科学杂志(2021年2期)2021-04-25 03:56:08
液压与气动(2020年4期)2020-04-10 07:38:52
中国医学影像技术(2018年10期)2018-11-06 10:11:14
课程教育研究·学法教法研究(2018年14期)2018-08-11 09:09:46
人生与伴侣·共同关注(2018年7期)2018-07-26 02:22:56
新课程·下旬(2018年10期)2018-01-28 10:56:30
光学仪器(2016年5期)2017-01-12 14:28:05
计量学报(2014年3期)2014-06-07 10:02:35