基于地图信息的机载雷达对海探测目标检测算法
2022-11-18 03:44王长杰郭帅刘泉华
北京理工大学学报 2022年11期
王长杰,郭帅,刘泉华
(1. 北京理工大学 信息与电子学院雷达技术研究所,北京 100081;2. 北京理工雷科电子信息技术有限公司,北京 100081)
机载雷达具有探测距离远、覆盖范围大、规避地物遮挡和机动灵活的特点,被广泛应用于远程预警、战场侦察、火力控制、地形测绘和超低空突防目标检测等方面[1-3]. 机载雷达系统通过发射线性调频信号,并接收目标反射的回波信号,来实现对目标距离方位信息的探测. 机载雷达主要工作在下视状态,其杂波具有分布范围广、强度大等特点. 在对海探测模式下,当机载雷达对海陆混合区域进行目标探测时,其杂波背景服从多种分布,地杂波使得陆地区域输出大量的检测目标,严重影响雷达对海探测的性能[4]. 空时自适应处理(space time adaptive processing,STAP)是一种有效的机载雷达地杂波抑制手段[5-6],该技术利用多通道雷达提供空域信息,通过空时域二维自适应滤波实现杂波抑制. 但是对于传统机载雷达,其天线的硬件条件限制了STAP 技术的应用.另一种解决思路是寻找更加准确的杂波背景估计策略. 2014 年DOYURAN[7]提出了一种距离非均匀的期望最大(expectation-maximization,EM)方法,该方法认为每个距离单元的杂波分量服从 Weibull 分布簇中的一种,利用期望最大算法估计分布的参数并设置相应的门限,该方法适用于非瑞利和距离非均匀分布的杂波环境. TAO 等[8]提出了一种基于截断统计的恒虚警检测器,用于单视和多视合成孔径雷达数据中的舰船检测,该方法主要适用于目标密集的情况,能够减少多目标情况下背景估计偏差.高巍等[9]提出了一种基于FPGA 平台的动态可配置二维恒虚警检测(constant false alarm rate,CFAR)处理器实现结构,该处理器实现了单元平均(CA)、最大选择(GO)、最小选择(SO)及有序统计(OS)4 种二维矩形窗检测器的流水运算. 通过参数的控制,该处理器支持参考窗尺寸、保护窗尺寸及检测器类型等可配置.
此外,基于知识辅助技术的强杂波背景下目标检测算法也是近年来研究的热点. CONTE 等[10]利用地理信息系统先验信息,设计了一种自适应数据选择器,选择最均匀的训练样本,移除强离散点. 2015年位飞[11]利用 KL 散度分割背景,提取背景信息,设计自适应检测器,改善了机载雷达非均匀背景下的性能. 海陆分割技术辅助目标检测,有助于提取指定区域目标信息,减少杂波干扰,也受到广泛关注. 艾国红[12]提出了一种基于优化活动轮廓模型的海陆分割方法,利用图像的边沿特性和区域统计特性进行分割. 张苗辉[13]提出了一种基于SAR 图像的海陆分割算法,根据SAR 图像灰度值的差别,实现陆地目标剔除. SONG 等[14]根据GIS 获取地形覆盖类型得到经验杂波模型,运用雷达回波动态地更新杂波分区初始状态,利用杂波分区作为辅助知识,选择同分布的参考单元,实现基于辅助知识的恒虚警检测器.SONG 等[14]所提算法复杂且运算量较大,不利工程实践中实时处理. 以上所提方法在海陆环境复杂的情况下,其测度难以反映海洋区域和陆地区域的差异性,难以实现良好的分割效果. 并且,机载雷达对海探测模式需要实时输出目标检测结果,而基于图像的海陆分割计算量大,不易实现,无法满足实时检测的需求.
本文提出了一种新的基于地图信息的机载雷达对海探测目标检测算法,所提算法通过载机参数计算波束照射区域经纬度,然后利用地图数据进行海陆信息索引,输出目标的海陆位置,进而抑制陆地部分虚警,提高对海目标检测性能. 实验表明,该算法能够有效地抑制地杂波的影响,剔除陆地虚警,提高雷达对海探测性能. 并且该算法在利用地图数据进行海陆信息索引时,采用了缓冲访问的搜索方法,大大提高了算法的运行效率.
1 基于地图信息的目标检测算法原理
1.1 问题概述
当机载雷达以海面的船只、舰艇等为探测目标时,近海陆地杂波会严重干扰雷达对海面目标的检测跟踪. 如图1 所示,陆地部分的杂波水平明显高于海面部分,传统的恒虚警检测算法会导致大量陆地检测点输出.
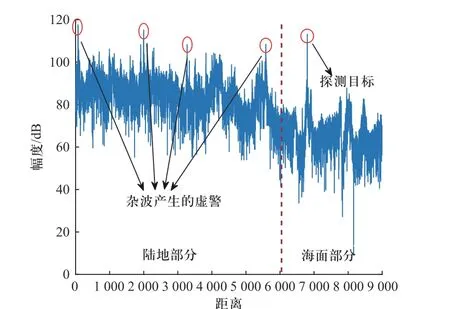
图1 回波分布示意图Fig. 1 Echo distribution diagram
针对复杂环境下的检测问题,国内外学者做了大量研究,通过获取杂波特性的先验知识识别杂波类型,实现多策略检测被广泛研究. 尽管现在有大量的检测算法可以改善多目标以及复杂杂波环境下的检测性能,但是随着环境日益复杂多变,对算法的适应性和鲁棒性要求也越来越高. 本文提出的基于地图信息的机载雷达对海探测目标检测算法,直接利用地理信息来避免不关注区域的杂波干扰,实现不关注区域的杂波抑制处理,提高了雷达的检测性能及其对复杂环境的适应性.
1.2 基于海陆轮廓的目标检测
为减少对海搜索过程中陆地杂波产生的大量虚警对雷达搜索性能的影响,本文采用了一种基于海陆轮廓的目标检测算法. 该算法的主要思想为:基于海陆地图信息生成二值化的海陆轮廓图,在进行目标检测之前首先根据目标点的位置信息判断其是否在陆地区域,如果是,则不输出,反之,利用CA-CFAR对目标进行检测. 本算法的流程原理如图2 所示.
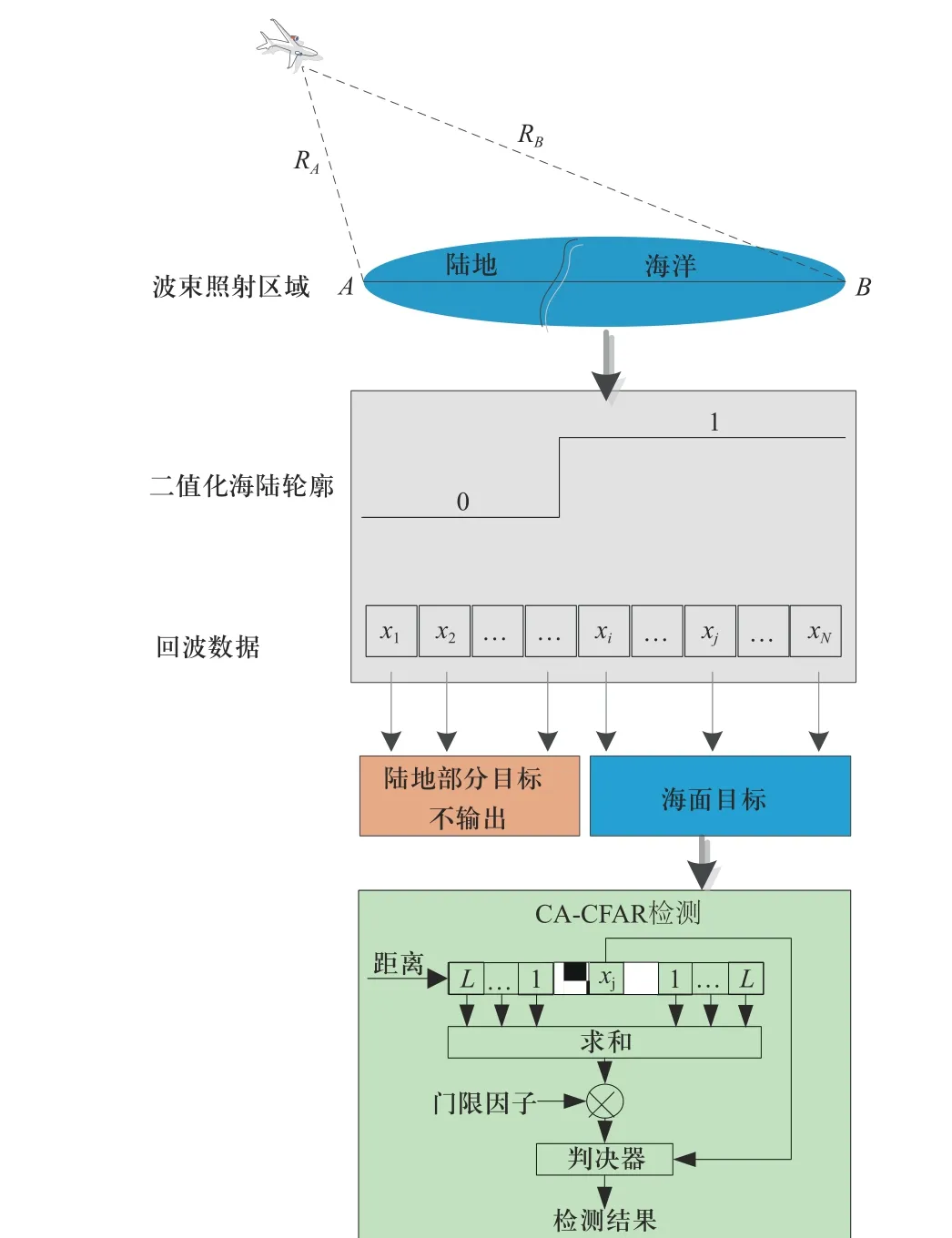
图2 基于海陆轮廓的目标检测原理Fig. 2 Principle of target detection based on the sea-land outline
CA-CFAR 是一种常用的恒虚警检测器,它将检测点参考单元的平均功率作为其检测门限的估计值,当检测点所在区域为海洋并且其功率大于检测门限时,输出该目标信息.
在目标检测过程中,需要判断每一个检测目标的海陆位置,输出海陆标志(01 序列,0 代表陆地,1代表海洋),其具体步骤如下:
(1) 根据载机参数计算波束照射区域的经纬度;
(2) 根据经纬度信息生成海陆轮廓;
(3) 结合海陆轮廓图,进行CFAR 检测.
其中涉及到的关键技术有经纬度计算和海陆轮廓生成,下文将对其原理进行详细介绍.
1.3 经纬度计算
惯导系统提供的天线指向参数为机体坐标系下参数信息,而目标区域经纬度的计算需在大地坐标系下进行[15-16]. 机体坐标系以载机机身方向为正,大地坐标系以大地北向为正,载机机身方向与北向夹角为航向角[17]. 设机体坐标系下方位角为As、俯仰角为Es, 大地坐标系下方位角为Ad、俯仰角为Ed,其转换关系如下[18-19]:
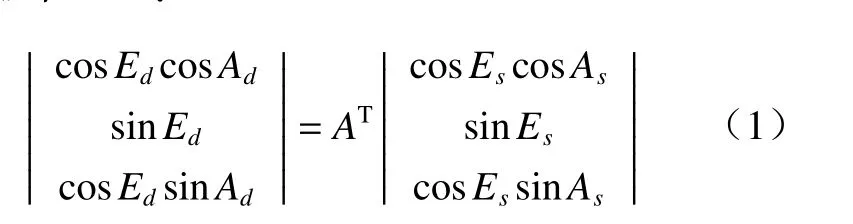
其中,

ψ为 飞 机 航 向 角, θ为 机 体 俯 仰 角, ϕ为 飞 机 横滚角.
图3 表示大地坐标系下,某目标点与飞机的位置关系. 该点与飞机在Y轴距离差为 △y=Hcos(α)/tan(β),在x轴距离差为 △x=Hsin(α)/tan(β). 已知飞机经纬度及距离差,可求得目标点的经纬度.
图3 大地坐标系下飞机与目标的位置关系Fig. 3 Relative location between airplane and target in geodetic coordinate system
图4 为波束照射区域示意图. 如图所示,椭圆AB为当前雷达波束照射区域,通过上述计算过程可得AB两点的经纬度. 本文所提算法认为,在每一个距离单元上,主轴AB所在的海陆位置与当前波束范围内同距离单元的目标所在的海陆位置一致.
图4 波束照射区域Fig. 4 Coverage of wave beam
1.4 海陆轮廓生成
本算法所用地图数据的覆盖范围为北纬55°~0°,东经70°~140°,分辨率为900 m,由132 个地图块拼接而成. 基于雷达回波的海陆轮廓生成过程步骤如下.
(1) 以一定的步进对波束照射区域采样,得到每个采样点的经纬度;
(2) 从地图数据中对采样点的海陆信息进行搜索,得到采样点的海陆判别.
具体流程如图5 所示. 地图数据以压缩的形式存储,因此第一步需要对地图图像数据进行解压缩.
图5 海陆识别实现流程Fig. 5 Procedure of sea-land identification processing
在海陆信息搜索过程中,首先搜索待识别区域所属的地图块,为提高效率,采用缓冲访问的搜索方法,从第二个PRT 的数据开始,只在上一次存储的地图块附近范围内搜索,仅当输入的经纬度不在此区域内时,再扩大搜索范围. 由于机载雷达波束连续发射,前后波束照射区域重叠范围大,采用这种搜索方式可以大大降低运算时间.
本文算法的总体流程如图6 所示.
图6 算法流程图Fig. 6 Algorithm flow chart
2 实验仿真
实验数据:本实验所用数据为某雷达的实际接收数据. 脉冲重复频率PRF = 420 Hz,采样率fs=10 MHz,带宽B=5M Hz,脉宽tp=70 μs.
(1) 检测结果分析.
回波数据与海陆轮廓图对比如图7 所示,对比显示,在海陆边界位置的部分测试点,由于地理环境的变化等原因,算法生成的海陆轮廓与实际不一致,但均在误差允许范围内,可以看出通过海陆判别得到的轮廓与回波显示的轮廓基本吻合. 除此之外,所有目标点的海陆判别结果均与实际相符.
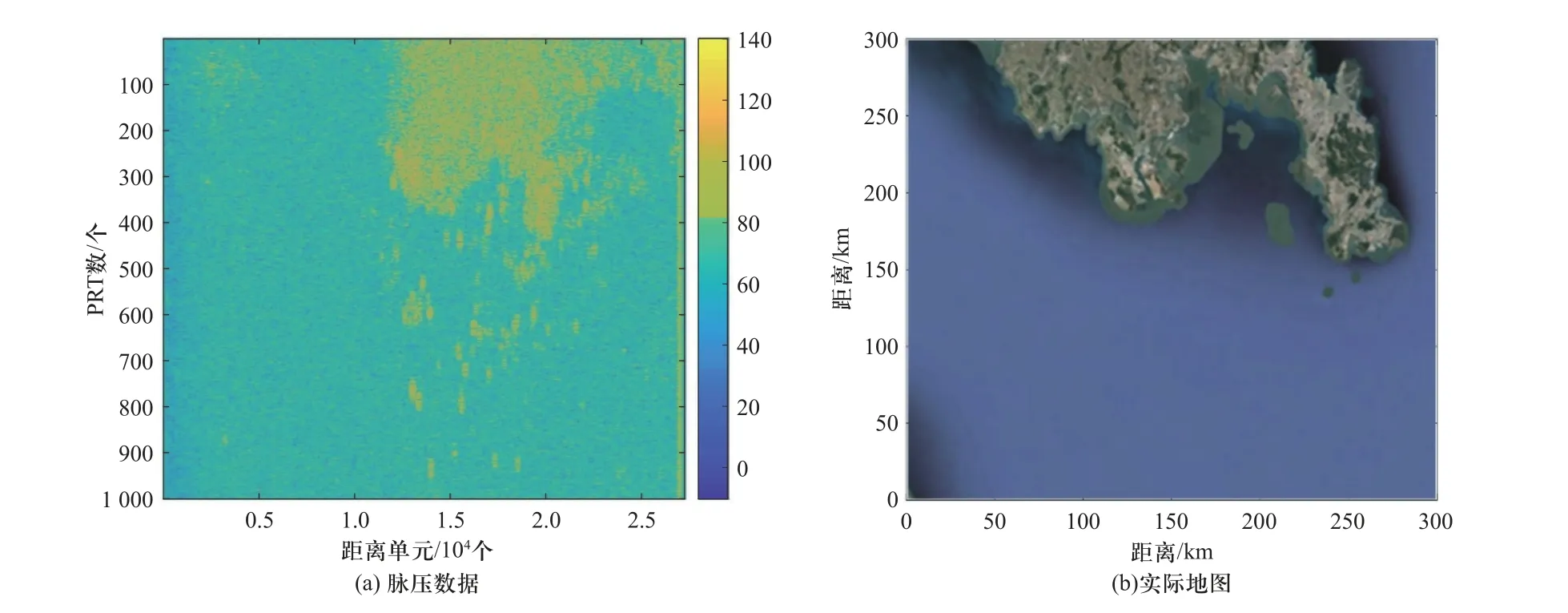
图7 回波数据与海陆轮廓图Fig. 7 Echo data and sea-land outline
基于实测数据的实验结果如图8 所示.
由图8(a)可知,回波数据显示出了较明显的海陆分界,陆地部分反射的回波强度明显高于海面部分. 传统CFAR 检测方法仅根据回波背景强度设置检测门限,在杂波较强的陆地区域,会出现大量的虚警(图中黑框为相应位置的检测输出),在对输出目标个数有最大值限制的情况下,严重影响海面目标的输出,降低雷达对海探测性能.
图8(b)为雷达波束照射区域的海陆轮廓. 图8(c)为结合海陆识别后的目标检测结果. 通过对比可知,本文所提出的目标检测算法可以保留海面目标并且剔除陆地区域的全部虚警. 在传统雷达硬件条件受限的情况下,有效地解决了地杂波对目标检测的影响,提高了雷达对海探测的性能.
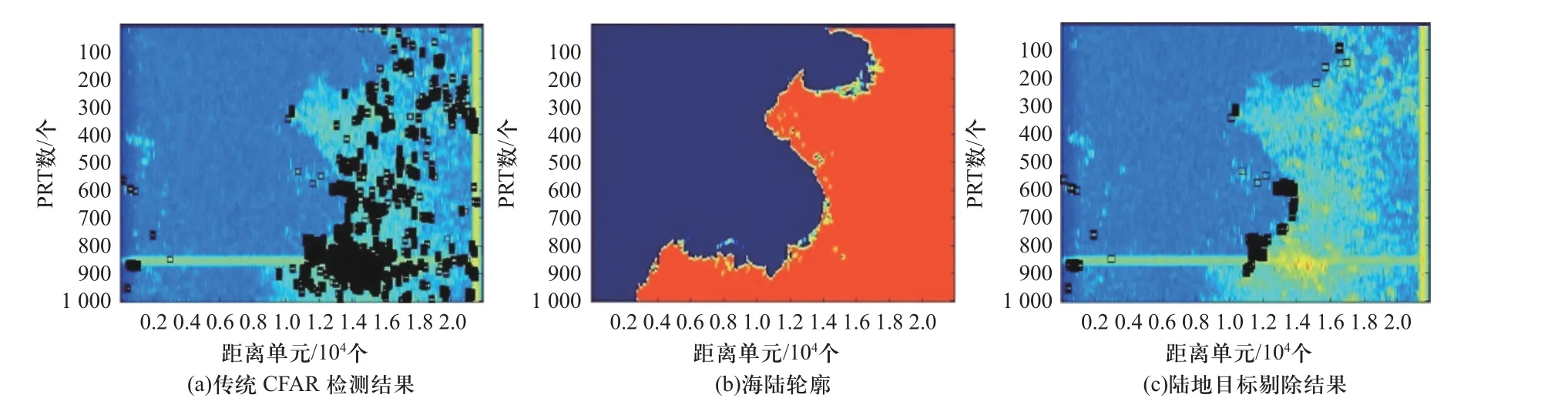
图8 实验结果Fig. 8 Experimental result
(2) 运算量分析.
本实验仿真条件:电脑处理器Inter(R)Core(TM)i3-4160,4 GRAM,32 位Windows7 系统,MatlabR2014a.传统检测方法与本文算法的运行时间对比如表1 所示.

表1 运行时间对比Tab. 1 Comparison of operation time
对于一个脉冲数据,本文算法的平均运行时间相比传统检测方法增加了7.9 ms,增加百分比为0.39%. 由此可知,本文所提算法在提高检测性能的同时,并未带来运算量的剧增,大大提高了工程实现的可能.
3 结 论
本文将地图信息与传统检测方法结合,提出了一种新的基于地图信息的机载雷达对海探测目标检测算法. 该算法通过经纬度计算及海陆识别得到回波区域的海陆轮廓,结合海陆轮廓对目标进行筛选和剔除,保留海面目标,抑制陆地区域检测输出. 实验结果表明,该方法效果显著,具有快速识别、准确剔除的优点,可以抑制地杂波的影响,大大提高机载雷达对海探测性能,提高雷达在不同地理环境下的适应性.
猜你喜欢
卫星应用(2022年3期)2022-05-23
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
科技资讯(2018年10期)2018-10-26
北京心理卫生协会学校心理卫生委员会学术年会论文集(2018年1期)2018-05-10
新课程·中旬(2017年1期)2017-03-27
环球时报(2016-08-01)2016-08-01
祝您健康(1982年5期)1982-12-29