反推力吸附的爬壁机器人设计及实验研究
2022-11-18 03:44樊明梁鹏高学山张清芳黎铭康
北京理工大学学报 2022年11期
樊明,梁鹏,高学山,张清芳,黎铭康
(1. 32180 部队,北京 100072;2. 北京理工大学 机电学院,北京 100081)
近年来,人们对民用、军事和工业领域的爬壁机器人越来越感兴趣,它能够代替人类从事一些如桥墩检测、玻璃外墙清洗、反恐侦察、船舶焊接清洗和火灾危险品检测等重要工作[1]. 拟以地面无人机动平台为研究背景,探索能够协助士兵在复杂的作战空间探测敌人,扩大作战视野,有效在侦察、核生化武器探测、障碍突破、反狙击和直接射杀等任务时避免人员损伤,大幅度提高士兵的生存率、灵活性和战斗力,并满足城市、山地等复杂战场环境和高危环境作战需求的特征机器人移动平台,通过开展爬壁特种移动机器人研究,为未来城市巷战侦查,定点爆破等提供技术支撑.
爬壁机器人根据吸附方式可以分为:真空负压式、磁吸附、反推力和仿生等,根据移动方式可以分为轮式、履带、足式和轮足复合式移动. 真空负压式爬壁机器人[2-3]大多数用在壁面比较光滑的墙面,广泛用于玻璃壁面进行清理工作,但吸附接触面容易产生气体泄漏,壁面平整度要求高,几乎无越障能力. 磁吸附爬壁机器人[4-7]多用于大型金属器皿内外表面检查,具备较高的负载和多壁面间切换移动的能力,但由于只适用于导磁材料壁面,壁面适应性较差. 仿生爬壁移动机器人利用仿生吸附原理制作黏附[8-10](钩挂[11-12])材料,贴附(钩挂)在接触壁面,采用仿生黏附材料,足底无法实现自清洁;采用绒毛挂钩,驱动控制较为复杂. 近年来不少学者和研究机构在旋翼气动效应研究的基础上[13],采用反推力作为壁面吸附[14-17]开展了很多工作,ALKALLA 等[18-19]先后研制了使用螺旋桨反推力的同轴双桨EJBotⅠ、EJBotⅡ机器人,它们适合在多种垂直壁面进行快速攀爬移动;MYEONG 等[20]、KAWASAKI 等[21]利用多轴旋翼飞行器,从地面起飞后转身90°贴附于墙面上,贴附过程控制较为复杂;王建中等[22]、王正杰等[23]以螺旋桨为动力开展研制地空多维度空间移动机器人.
目前已经研制出的爬壁机器人移动速度和壁面适应性相对较差,为满足爬壁机器人快速稳定在多种接触壁面运动,拟采用双螺旋桨反推力结构作为吸附力,轮式作为移动方式进行移动机器人结构设计,分析螺旋桨反推力作为动力装置设计的合理性,开展机器人在水平状态和垂直壁面牵引力及吸附力测试实验,探索其运动及控制最优方式,通过实验验证爬壁机器人在小斜坡和垂直壁面吸附稳定性.
1 机器人结构及动力系统设计
1.1 机器人结构
为实现机器人快速、灵活和高效在不同粗糙壁面间移动,机器人设计应具有结构简单、易操作、运动稳定等特点. 机器人由旋翼动力装置、支撑平台、前后轮系统、控制模块、通信模块等组成. 机器人结构如图1 所示. 旋翼动力装置由无刷电机、桨叶、旋翼固定圆盘等构成,反推力通过桨叶反装在无刷电机上来提供,同时改变旋翼动力装置倾斜角度来控制机器人前进和后退,旋翼动力装置通过舵机实现360°旋转. 机器人结构参数如表1 所示.

图1 爬壁机器人样机Fig. 1 Wall mobile robot prototype
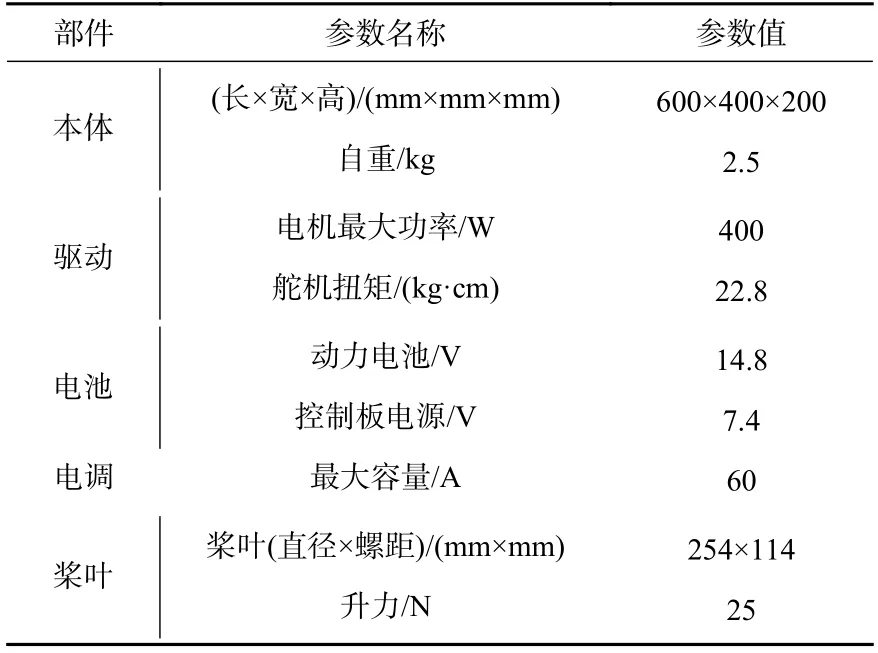
表1 机器人结构参数Tab. 1 Robot structure parameters
为实现在多种垂直接触面间进行切换移动,机器人结构设计成双旋翼结构. 在壁面间切换时,前旋翼起提升作用,后旋翼起推动作用;在壁面稳定吸附移动时,前旋翼提供主要吸附力,后旋翼提供前进驱动力. 为避免旋翼产生气动扰动影响,机器人在实际运动控制过程中,前后旋翼转向相反. 在运动过程中,为保证机器人系统运转稳定且具有较低的功耗,桨叶选用二叶桨,支撑平台架为碳纤维加芳纶窝峰材料复合而成,结构支撑强度高,本体质量轻. 前后轮系统采用骨架结构设计,以高性能树脂材料通过3D打印制作而成.
1.2 动力系统设计
为了得到机器人动力系统实际反推力大小,需要对旋翼动力进行测试. 旋翼反推力是由控制器进行脉宽调制(pulse width modulation,PWM),并由电子调速器根据脉宽来调节电机转速,而桨叶安装在电机输出轴上,直接产生反推力. 忽略螺旋桨的阻力和侧向力矩,单个动力单元产生的主要反推力F、扭矩Q. 反推力和扭矩均与转速的平方成正比[24].
为简化模型做出如下假设:①机器人是绝对的刚体,重心位置不变,质量为常数,忽略其结构和弹性形变;②空气是没有黏性不可压缩的理想流体;③旋翼在旋转时是一个均匀作用于空气的无限薄的圆盘;④假设地面为惯性参考系,即假设地面坐标系为惯性坐标系.

式中:CF,CQ分别为旋翼的拉力系数和扭矩系数;ρ为空气密度;A=πR2为螺旋桨面积;ρ,A,CF,CQ,R均为定值;k为升力系数;d为扭矩系数. 由上述公式可知,旋翼反推力与电机转速的平方成正比,而转速的平方与脉宽成正比关系,螺旋桨输出反推力与控制器输出脉宽也成正比关系.
为得到真实的反推力大小,参考旋翼推力测量方法[25-26],对反推力吸附装置进行测量. 测试装置如图2 所示,主要包括:电池、数字显示拉力测试仪、无刷电机、桨叶、电子调速器、接收器、遥控器等,通过该装置能够实时监测到不同桨叶转速下的反推力大小.
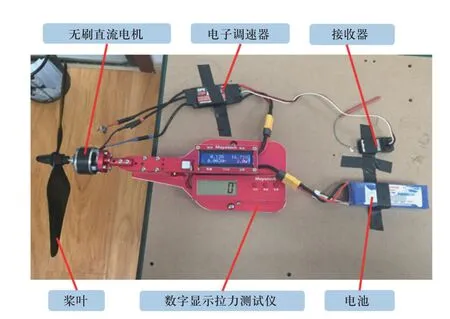
图2 电机反推力测试实验装置Fig. 2 Experimental device for testing motor thrust
图3 和图4 所示分别为9060 桨叶(桨叶半径为114.3 mm,螺距152.4 mm)及1070 桨叶(桨叶半径为127.0 mm,螺距177.8 mm)反推力拉力测试曲线,通过调节无刷电机的正反转和桨叶正反安装方式,可以使得螺旋桨均产生反推力.
从图3、图4 可以清晰看出反推力的大小随着电流值的增加而增加,从图中可以看出,1070 桨叶拉力明显优于9060 桨叶拉力;图4 中当电流值为50 A 时,反推力最大为25 N,继续改变PWM 值,已无法增大电机转速,该动力系统动力输出值达到峰值. 在电流调节最大量程范围内,机器人动力装置搭配1070桨叶.
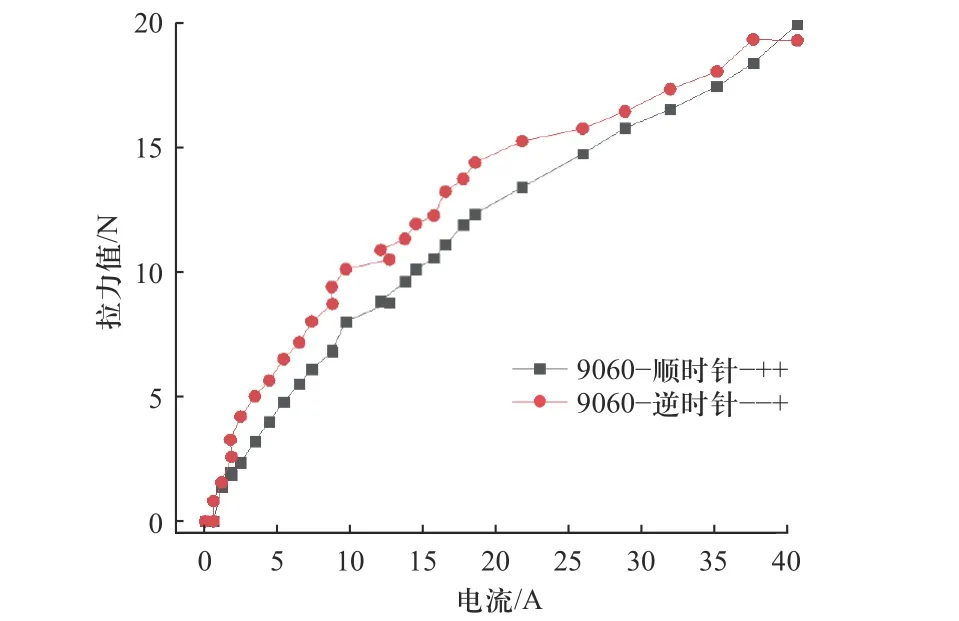
图3 9060 桨反推力曲线Fig. 3 9060 propeller reverse thrust curve
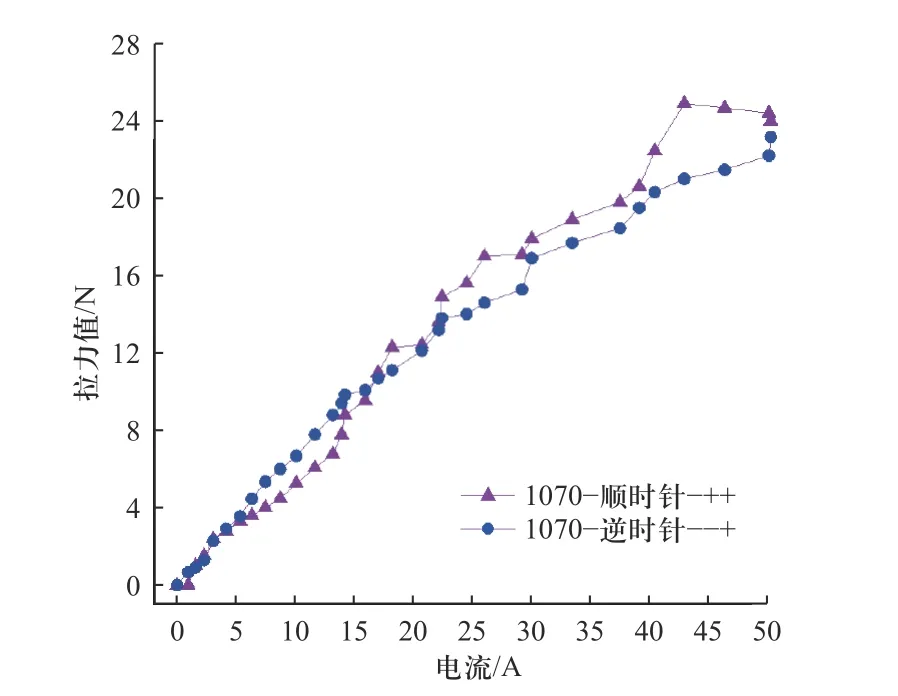
图4 1070 桨反推力曲线Fig. 4 1070 propeller reverse thrust curve
2 机器人受力分析
机器人从地面到壁面运动过程主要分为地面到斜面运动和壁面吸附移动两种状态. 为分析机器人不同运动状态下的受力情况,对上述两种运动状态进行受力分析,机器人在上坡时受力分析如图5所示.
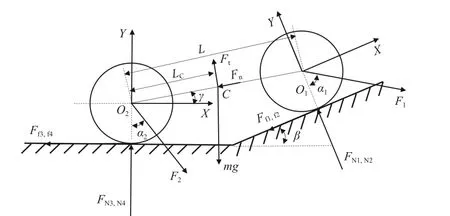
图5 机器人地-壁受力分析Fig. 5 Robot floor-wall force analysis
当斜坡倾斜角度β=0°时,在不同旋翼倾角改变状态下,机器人以不同运动速度前进;当β>0°,机器人为爬坡运动,当β较小时,机器人能以一定初速度在地面和小斜面间切换移动;当β较大时,由于出现较大过渡角,机器人依靠初速度很容易造成机器人结构性损失,为使机器人能够柔顺地从地面移动到壁面,在壁面间切换时,前旋翼起提升作用,后旋翼起推动作用,在两者共同作用下,实现机器人壁面间切换,机器人的上坡时静力学模型为:
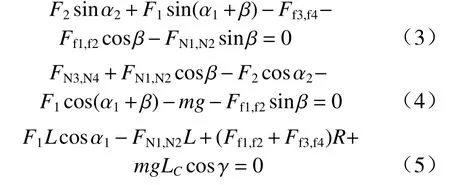
式中:FNi为作用在i轮上的法向力;Ffi为作用在i轮上的摩擦力;F1和F2分别为前、后旋翼产生的反推力;α1和α2分别为前、后旋翼倾角;β为小斜面倾斜角;γ为机器人平面与水平面的夹角;m为机器人总质量;R为车轮半径;C为机器人质心位置;LC为机器人质心到后轮轴心的距离;L为前后轮中心轴距离轮子.
当为β=0°时,机器人在水平地面移动,旋翼倾角α1和α2设 计 为-90°~180°,Ffi=FNiµ(i=1,2),式(3)(4)可写成:
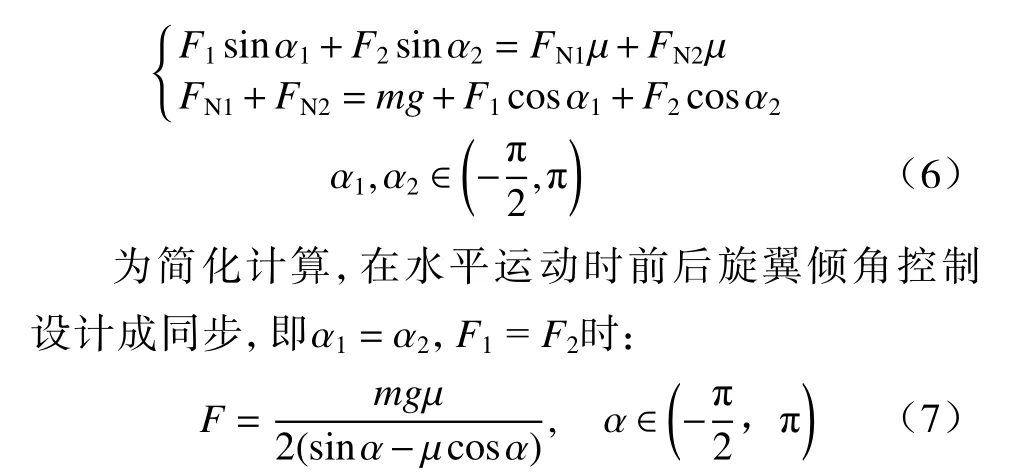
机器人驱动力与旋翼倾斜角之间关系,如图6所示,机器人驱动力与旋翼角度变化之间的关系为:α=0.329 2 时,F能够达到最大. 即旋翼角度为59.256°.
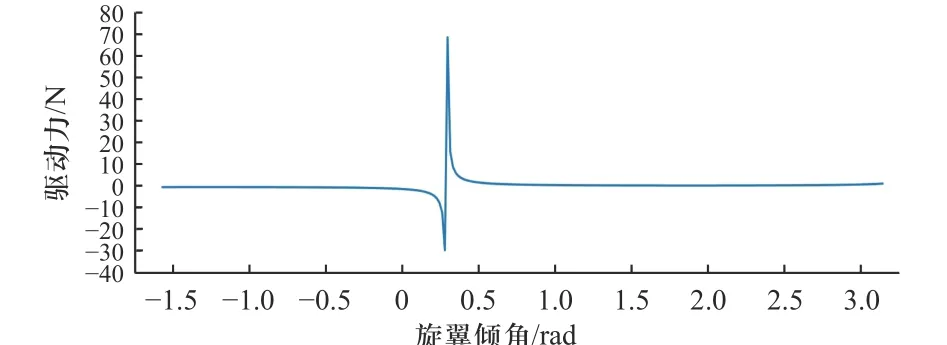
图6 驱动力与旋翼倾角之间关系图Fig. 6 Relationship between driving force and rotor inclination angle
当机器人后轮完全移动到斜面上时,前后旋翼均产生吸附力和前进驱动力,机器人能稳定吸附在壁面上,机器人壁面上受力分析如图7 所示.
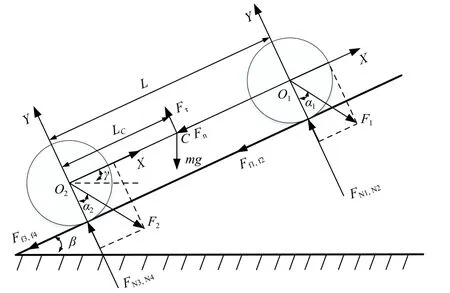
图7 机器人斜面受力分析Fig. 7 Force analysis on the inclined plane of the robot
在斜坡上时的静力学模型为:
当斜面倾角β为90°时,机器人在前后双旋翼作用下吸附在垂直壁面,此时,反推力既要保证机器人牢牢吸附在壁面上,又要克服重力作用使机器人向上移动.
3 牵引力和吸附力测量
3.1 牵引力与旋翼倾斜角度关系
为研究不同旋翼倾斜角度对机器人运动性能的影响,通过拉力计测量机器人在不同旋翼倾角下的水平拉力值,不同拉力大小能够表示出不同运动性能. 机器人牵引力测量实验如图8 所示,通过软绳拉力计能够实时测量牵引力大小,软绳悬挂在后轮轮轴处.
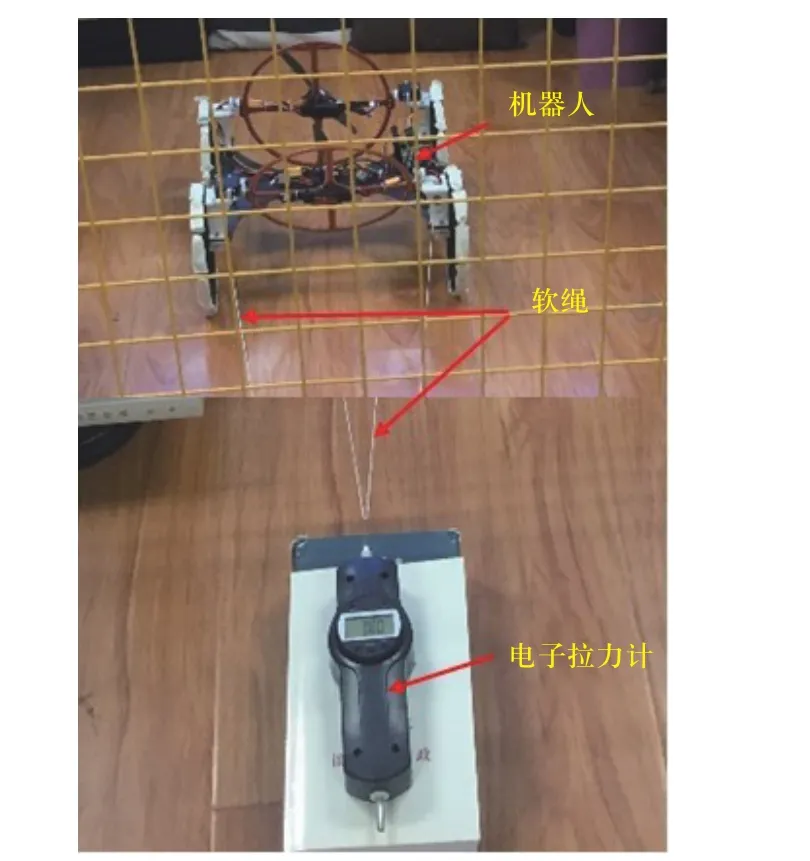
图8 不同旋翼倾斜角下牵引力值Fig. 8 Traction value under different rotor tilt angles
在测试过程中,调整旋翼倾斜角度和无刷电机转速控制机器人前进和后退,为测量不同旋翼倾斜角度下机器人所表现出的运动性能,实验设置旋翼倾斜角度为30°、45°、60°、90°时,测量机器人水平牵引力大小,水平牵引力曲线如图9 所示.
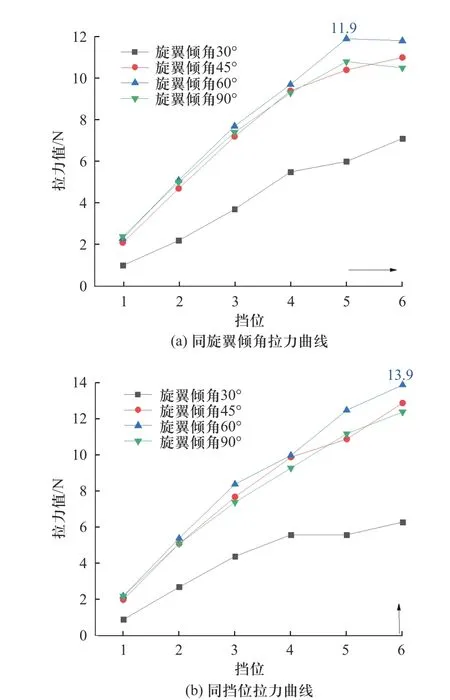
图9 9060 桨水平拉力曲线Fig. 9 9060 propeller horizontal pull curve
图9(a)9(b)分别为机器人安装9060 桨叶时,旋翼倾角为30°、45°、60°、90°情况下,机器人水平牵引拉力测量曲线,图9(a)为在挡位不变情况下,改变旋翼倾斜角度所测量出来的数据,图9(b)为旋翼倾斜角度不变情况下,改变机器人挡位所测量得到的数据(考虑安全和实验室场地限制,实际测量时机器人挡位最大到6 挡,设计10 挡位). 从图9(a)9(b)可以看出不同旋翼倾角下,机器人水平牵引力随挡位增加而增加,同等挡位下,旋翼倾角为60°时,机器人水平牵引力值大于其他旋翼倾角拉力值. 实验测试结果与机器人水平面数值计算结果一致,同时验证数值计算的正确性.
为进一步验证上述实验结果的准确性,图10(a)10(b)分别为机器人安装1070 桨叶时,旋翼倾角为15°、30°、45°、60°、75°、90°情况下水平牵引拉力测量曲线,从图中可以看出,水平牵引力随挡位增加而增加,同样挡位下,旋翼倾角为60°时所测得的水平牵引力值由于其他挡位下水平牵引力. 同时对比图10(a)10(b)45°、60°、75°数据曲线可以看出,挡位不变情况下,通过改变旋翼倾斜角度变化得到的结果,优于旋翼角度不变挡位变化曲线值,旋翼倾角为60°时,机器人运动性能最优.
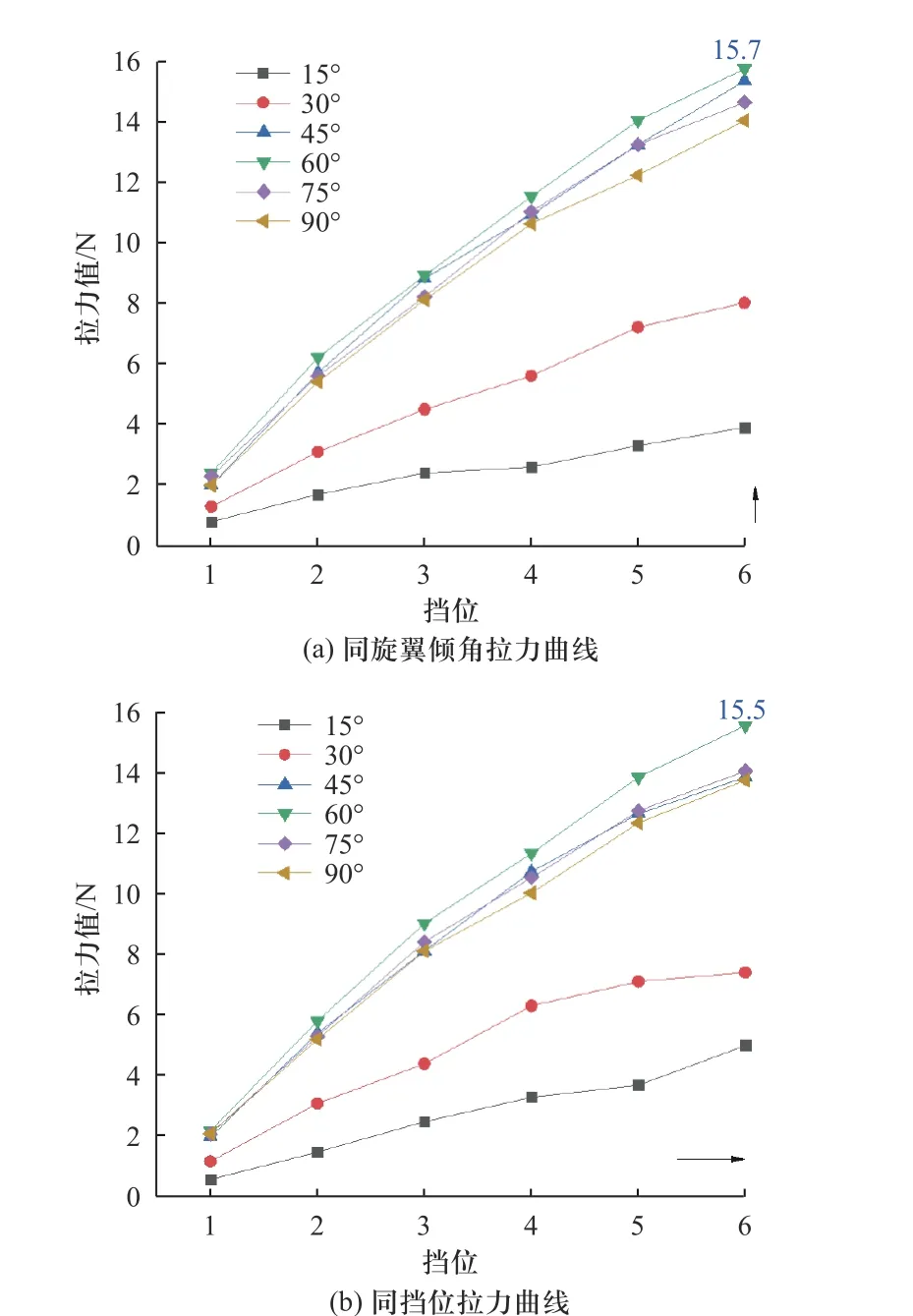
图10 1070 桨水平拉力曲线Fig. 10 1070 propeller horizontal pull curve
3.2 牵引力与旋翼倾角频副关系
从机器人水平牵引力测试实验可以看出,机器人采用不同的操作方式,机器人所表现出来的水平牵引力有所不同,为研究机器人旋翼倾角调节方式对机器人牵引力性能的影响,采用旋翼单度调节和成5 倍数调节的方式,使旋翼倾角逐步递增到5°,分别测量机器人在水平地面上的牵引力,为降低实验风险,实验测量过程中机器人动力挡位设置3/10 挡.
不同频副旋翼倾角变化下,机器人水平牵引力曲线如图11 所示,从图中可以看出,水平牵引力均随旋翼倾角的增加而变大,旋翼倾斜角度单度增加到测量角度时,水平牵引力值明显优于旋翼成5 倍增加拉力值. 由于在实际操作控制过程中,旋翼倾角单度变化机器人性能优于旋翼倾角成倍变化,为后续机器人壁面实验操作合理性和可行性奠定良好的基础.
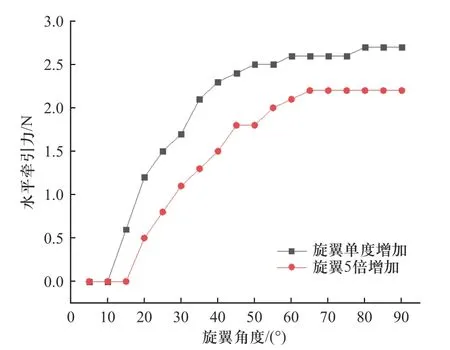
图11 不同频副拉力曲线Fig. 11 Tensile curve of different frequency pairs
3.3 垂直壁面吸附力测试
在竖直状态下,反推力作为机器人壁面稳定吸附主要作用力,还需对其能够获得最大反推力进行测量分析. 机器人与接触壁面无接触状态下,双旋翼壁面移动机器人反推力测试平台如图12所示,该平台中双旋翼机器人通过两侧软绳整体悬挂在竖直状态,从机器人4 个轮轴处引出4 条软绳集结在拉力传感器的侧两端. 在旋翼倾斜为0°状态时,同时调整前后螺旋桨电机转速,将电机从0 开始启动到最大值,通过在线测量得到拉力传感器实时测量数据,垂直状态下反推力吸附测试曲线如图13 所示.
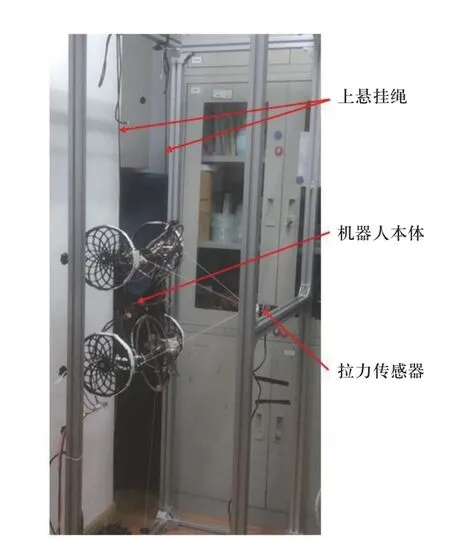
图12 反推力测试平台Fig. 12 Reverse thrust test platform
从图13 可以看出在水平状态下,测量出的反推力值最大为35.96 N;在竖直状态下,反推力值最大只有27.99 N;从图4 可以得出2 个1070 桨真实最大反推力能够达到50 N. 从图13 可以得出,不同状态下,机器人反推力吸附性能发生很大变化,当机器人处于水平状态时,结构参数对机器人气动效应产生很大影响,气动扰流和涡旋作用下,降低了无刷电机产生反推力吸附效率;当机器人处于竖直状态下,气动效应的影响更加显著,未来如何减小结构参数对机器人气动效应和提高无刷电机有效吸附功率,将是研究的关键.
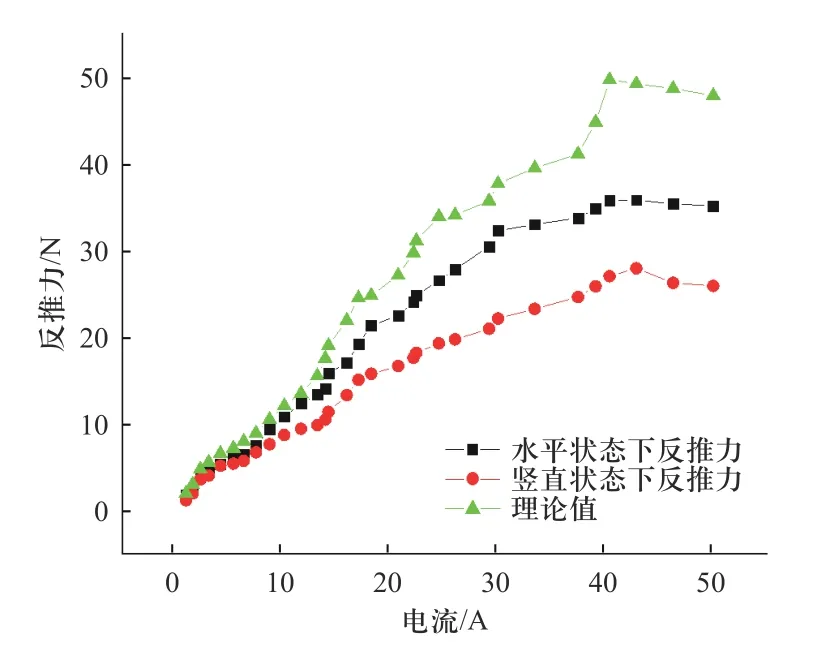
图13 反推力测量曲线Fig. 13 Reverse thrust measurement curve
4 实 验
4.1 小斜坡实验
为了验证机器人运动可行性及是否能稳定吸附在壁面上,首先对机器人在20°斜坡和垂直壁面进行实验. 壁面移动机器人20°斜面运动如图14 所示,由于在小角度斜面状况下,机器人从地面到墙面运动过程,可以直接靠机器人在地面初始速度高速运动到斜面上,当底板倾斜角度增大到一定程度时,机器人从地面接触斜坡板时,巨大的冲击力容易导致机器人结构损坏,所以该实验直接将机器人斜吊在小角度斜面上,进行斜坡起步运动前进及后退.
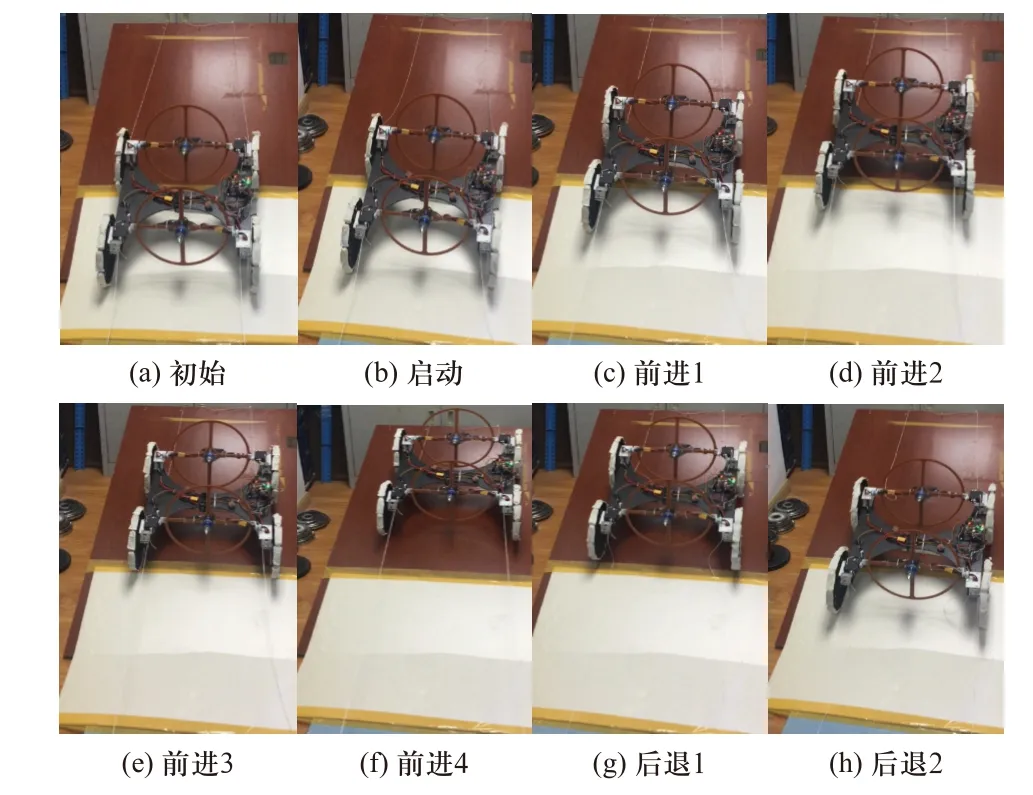
图14 机器人小斜坡爬坡运动Fig. 14 Robot climbing on a small slope
机器人在小斜面上,通过改变旋翼倾斜角度和电机转速来驱动机器人前进,图14(a)~14(f)为机器人在小斜坡上前进运动,图14(g)~14(h)为机器人在小斜坡上后退运动. 从图中可以看出,当旋翼倾角调节到一定角度时,通过控制无刷直流电机转速,来驱动控制机器人前进和后退. 实验表明机器人能够在小斜坡上稳定前进和后退.
4.2 垂直壁面实验
在无风状态下,机器人壁面吸附及运动实验如图15 所示,为防止机器人冲出壁面,在机器人下方安装一定长度的软绳,机器人可以在壁面一定范围内移动,在不同的时间节点表现出不同的状态和行程. 随着转速和前后旋翼倾角的变化,机器人的运动状态逐渐发生变化. 图15(a)为运动起始初始状态;15(b)为无刷电机启动,前后旋翼倾斜角度调整到60°;15(c)随着无刷电机转速的不断增加,开始向上移动,启动后机身平台出现一定侧滑;15(d)~15(g)机器人持续向上移动;15(h)~15(l)随着无刷电机转速的降低,机器人从垂直壁面缓慢向下后退.
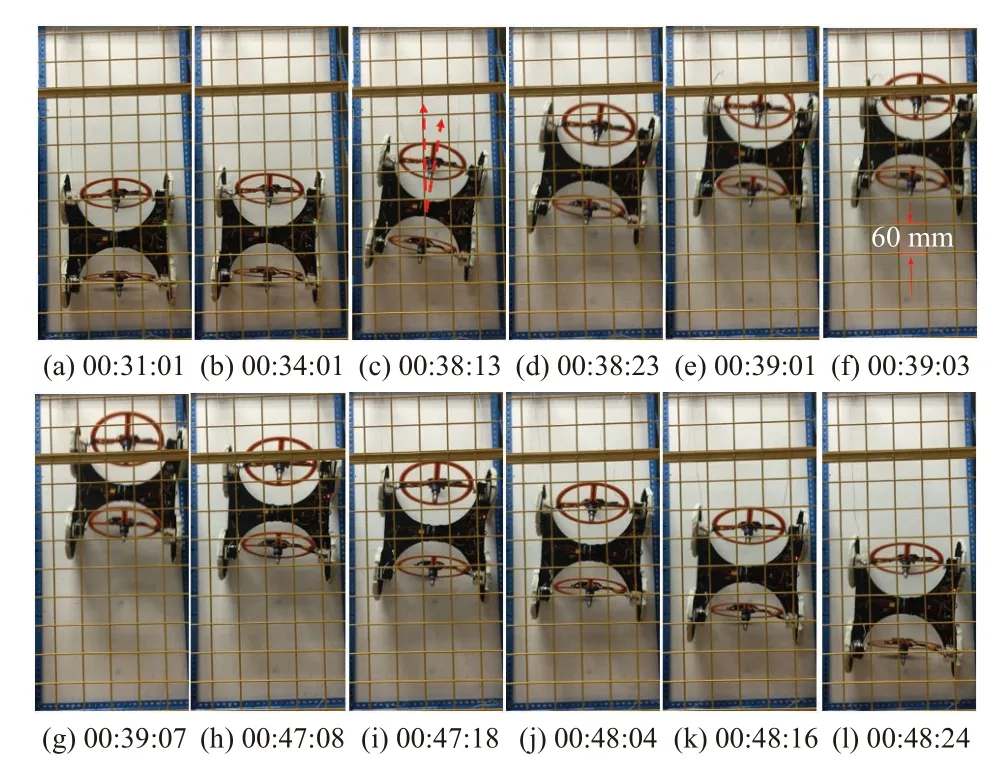
图15 机器人壁面稳定吸附运动过程Fig. 15 The robot wall surface stable adsorption movement process
由于实验是在室内墙壁上进行的,在有限的移动行程里,移动速度大于0.24 m/s. 在墙体运动测试中,螺旋桨实际转速为最大速度的60%,机器人已经能够稳定地附着在垂直墙上. 实验测试结果表明,该机器人在室内垂直墙壁上实现了稳定的吸附和运动.
在上述实验中,由于机器人前后旋翼反推力吸附分配不均,造成机器人本体出现向右倾斜. 通过调整旋翼倾斜角度和前后桨叶转速大小,能够极大解决机器人在初始阶段出现的倾斜问题. 在室内垂直墙面吸附优化测试实验如图16 所示,实验中前旋翼倾角为55°,后旋翼倾角为60°,其中16(a)机器人初始状态,16(b)~16(c)前后旋翼调整,16(d)~16(f)沿垂直壁向上移动,16(g)~16(h)沿垂直壁缓慢向下移动. 从机器人在垂直壁面运动状态可以看出,机器人可以在垂直壁面牢牢吸附并稳定向上和向下移动.通过调整前后旋翼的倾角,大幅改善了机器人沿垂直壁的运动状态,左右前轮以近似水平的直线向前移动,而主体几乎没有发生侧滑,表面通过调整前后旋翼姿态角和桨叶转速能够极大地改善机器人运动性能.
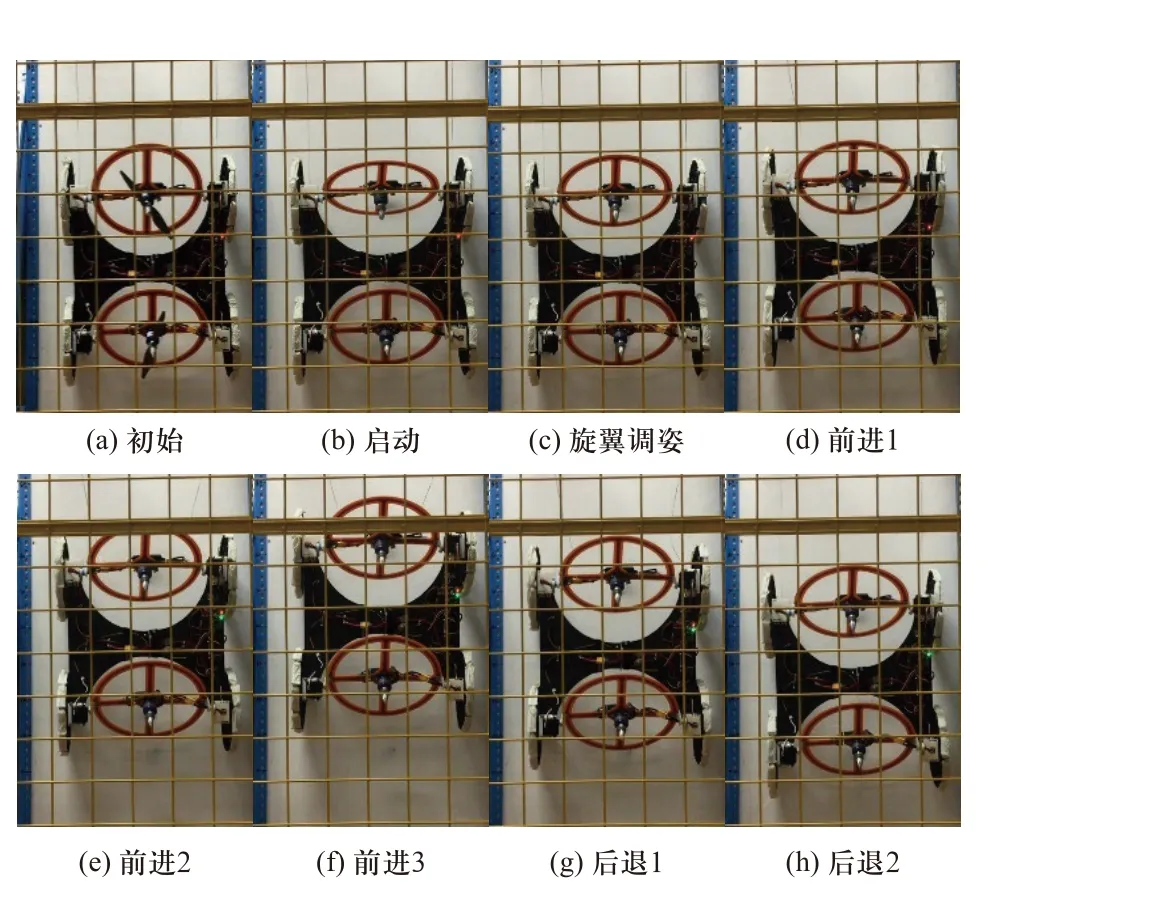
图16 壁面吸附优化实验Fig. 16 Wall adsorption optimization experiment
5 结 论
本文设计了一种能够稳定吸附在多种不同壁面的双螺旋桨式爬壁机器人,为实现机器人稳定吸附在垂直壁面,开展了机器人结构轻量化设计和真实动力系统测试分析,得出单个反推力最高能达到25 N;对机器人在多种情况下进行受力分析,通过实验验证了该机器人旋翼倾角为60°时,机器人能够获得更大的前驱动力.
通过实验测量数据得到机器人在操作过程中,旋翼倾角单度变化机器人运动性能优于旋翼倾角成倍变化;通过垂直壁面下吸附力测试得出,机器人在壁面状态下吸附力最大可达到27.99 N,初步满足双旋翼机器人壁面稳定吸附的设计要求,但在壁面稳定吸附时需要较高的螺旋桨转速;通过实验验证机器人在小斜坡和垂直壁面具备较高的移动性能和稳定吸附能力,并通过操作方式和控制方式的调整,优化了机器人运动效果.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
科学技术创新(2022年23期)2022-07-25
中国科技纵横(2022年6期)2022-04-28
航空工程进展(2022年2期)2022-04-24
原子与分子物理学报(2022年2期)2022-03-04
模具工业(2021年8期)2021-08-30
固体火箭技术(2018年6期)2019-01-18
北京航空航天大学学报(2017年5期)2017-11-23
科技创新与应用(2017年26期)2017-09-12
科技创新与应用(2017年1期)2017-05-11