
基于点云数据三维重建的隧道超欠挖检测模型研究
2022-11-18 08:31周雪云盛吉崇查文华
科技与创新 2022年22期
方 剑,周雪云,盛吉崇,许 涛,查文华
(1.金华市公路与运输管理中心,浙江 金华 321013;2.东华理工大学土木与建筑工程学院,江西 南昌 330013;3.金华市交通工程管理中心,浙江 金华 321013)
隧道施工过程中,难以避免会发生断面超欠挖现象,超欠挖不仅影响施工安全性和围岩稳定性,而且会影响工程施工成本及建设质量,所以超欠挖检测成为隧道建设中不可缺少的一个环节,精准的超欠挖检测可实时反映隧道爆破开挖质量,也可为后期支护成本的控制提供依据[1-2]。
目前隧道超欠挖的检测方法包括断面仪、全站仪、三维近景摄影等检测方法,其检测方式较为传统,且效率较低,检测不全面,易产生漏测现象。近年来,随着三维激光扫描技术的日渐成熟以及计算机性能的快速提升,三维激光扫描技术较为成熟地应用在隧道工程中[3-4]。本文以实际工程项目为背景,利用三维激光扫描技术有效精准检测,分析隧道超欠挖状况,并验证该方法可行性与实用性;从而帮助相关人员对隧道工程进行详细的分析,对保障隧道工程项目的施工质量与施工安全发挥着重要的作用。
1 工程概况
本次研究依托的项目是浙江省某个在建公路隧道项目,该项目位于浙江中部低山丘陵区,主要成因为构造-剥蚀地貌,地貌类型主要为低山丘陵区和山间及沟谷坡洪积斜地区。山体主要沿北东向延伸,最高点在线路西侧的山尖,海拔为683.9 m,线路最高点海拔为645 m。图1 为隧道所在地段的地质断面图,隧道施工开挖的围岩以中风化凝灰岩为主,部分区段为花岗斑岩;隧道全长4 810 m,为双洞双线隧道,左洞起点桩号为K29+788(左线ZK31+805),终点桩号为K31+703(左线ZK31+692),采用上下台阶法施工,试验隧道段围岩等级为Ⅳ级,设计隧道为三心圆拱。

图1 隧道断面图
本文主要基于三维激光扫描得到的点云数据,构建实际开挖曲面轮廓模型,并与设计开挖曲面轮廓模型进行对比,分析得出超欠挖检测结果,并讨论其检测结果的有效性。
三维激光扫描检测方法主要由点云数据采集、点云数据处理、三维曲面重建和隧道超欠挖对比检测方法及应用4 部分组成。
2 点云数据采集与处理
2.1 点云数据采集
采用Riegl VZ-4000 型号三维激光扫描仪对隧道现场点云数据进行采集。采集标段为K31+325—K31+335,为了保证三维激光扫描的精度以及配合项目施工的进度,不能一次性扫描获取所测标段的点云数据,随即将隧道测段分开为3 次采集,裸洞开挖进尺每次3 m 多,即进行一次点云数据采集。数据采集的大致步骤如下:现场勘查→布设标靶球控制点→选定基点位置架设三脚架→安置调平三维激光扫描仪→设置数据采集的参数模式→开始采集数据→保存数据并输出。
2.2 点云数据拼接
在实际采集过程中,多次采集的数据是各自独立的,但是各组数据表达的是同一隧道的不同区段,为了将隧道不同区段的数据整合成一条完整隧道的点云数据,需要对各组点云数据进行配准拼接。利用仪器设备所配套的软件,进行点云数据的拼接,将3 次采集的点云数据进行特征点配准拼接,最终形成隧道段整体三维轮廓模型,如图2 所示。

图2 完整隧道点云数据
2.3 点云数据降噪
三维激光扫描系统在采集数据时会产生许多噪声点及误差点,这是由于设备自身的缘故或者外部环境因素的影响,如被扫描物体的表面反射和某些物体的遮挡等[5-6]。这些噪点的存在会给后续数据的处理造成一定的误差,因此,针对不同类型的噪点需运用不同的噪点滤波方法进行去除。本文运用统计滤波、半径滤波、下采样、双边滤波4 种不同的滤波方法来进行数据的滤波去噪处理。
3 隧道实际开挖与设计轮廓面的三维重建
3.1 隧道实际开挖轮廓曲面重建
对三维点云数据模型进行曲面重建是隧道超欠挖检测及整体超欠挖评价的基础[7],也是隧道工程开挖质量检测的重要环节,通过建模可将不连续的点云数据构建成连续三维曲面,使相互独立的点数据形成三维曲面。隧道开挖轮廓不规则,凹凸不平,则其采集的三维点云数据杂乱无章,因此采用三角化网格的方法进行隧道曲面重建,其主要步骤如图3 所示。先对每个数据点搜索邻域点集,基于最大化最小角原则连接临近点成三角面,形成初始三角网,在此基础上加入其他离散点生成三角网格,实现对点云的三角化曲面模型的重建。
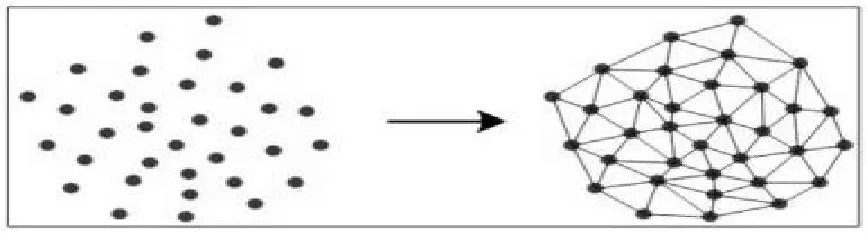
图3 三角网格法曲面重建示意图
3.2 隧道设计轮廓曲面重建
计算隧道超欠挖量值需运用设计对隧道三维轮廓曲面模型与实际隧道三维轮廓曲面模型进行对比计算分析,才能得出隧道超欠挖整体情况,其中计算某一断面的超欠挖量值时,需提取该断面与设计隧道断面的超欠挖量值并进行对比计算分析,才能得出某一断面的超欠挖情况。故在计算隧道超欠挖量值时,首先要重建设计隧道三维模型。隧道设计开挖曲面轮廓模型建立采用AutoCAD 软件结合设计资料,读取隧道开挖轮廓线及隧道中心轴线数据点坐标,拉伸形成完整的隧道设计开挖轮廓三维曲面模型,如图4 所示。

图4 隧道设计三维轮廓曲面模型
4 隧道超欠挖检测与评价方法
4.1 隧道超欠挖整体评价
隧道超欠挖整体评价指以设计隧道段为参考模型,将实际开挖隧道段作为对比模型进行叠加比较,比较实际隧道曲面模型上的三角化顶点到设计模型的距离,计算相同隧道段处整体超欠挖量值。将计算的距离分量字段转换成颜色梯度[8],获得比较模型和参考模型比较分析结果,如图5 所示。从图中可直观地获取隧道不同位置的超欠挖情况(正值表示超挖值,负值表示欠挖值),从而实现对隧道整体超欠挖分析与评价。
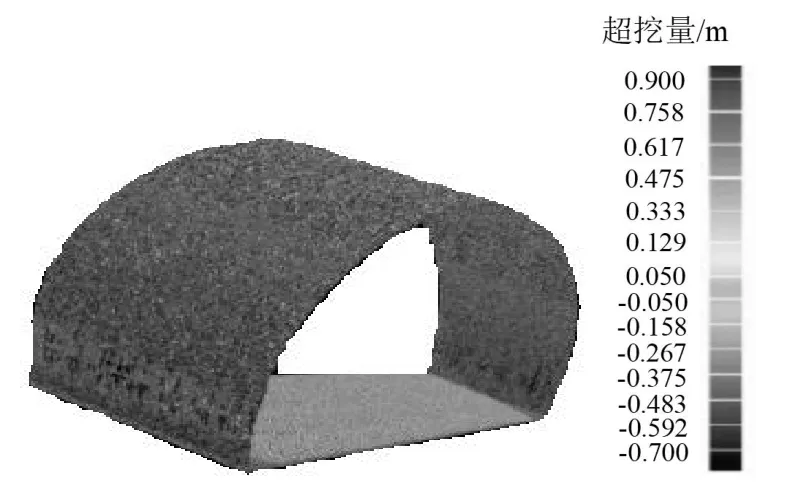
图5 整体超欠挖检测结果
4.2 隧道超欠挖值
隧道超欠挖值是指实际隧道超欠挖位置至设计开挖轮廓切线的垂直距离。其中根据二维坐标系中数据的坐标方位角,取值范围为(-π,π),获得第i点云数据所在的第k个圆弧段,并计算出第i点云数据的超欠挖值,公式为:

式(1)中:Di为第i点云数据的超欠挖量;xi为第i点云数据的横坐标;xk为第i点云数据所在第k个圆弧段的圆心横坐标;yi为第i点云数据的纵坐标;yk为第i点云数据所在第k个圆弧段的圆心纵坐标;Rk为第i点云数据所在第k个圆弧段的半径。
通过数据统计分析,得出超欠挖值计算结果,如图6 所示。图中细线代表隧道设计轮廓,粗线代表隧道实际开挖轮廓,其中设计轮廓外代表超挖(数值为正),设计轮廓内代表欠挖(数值为负)。
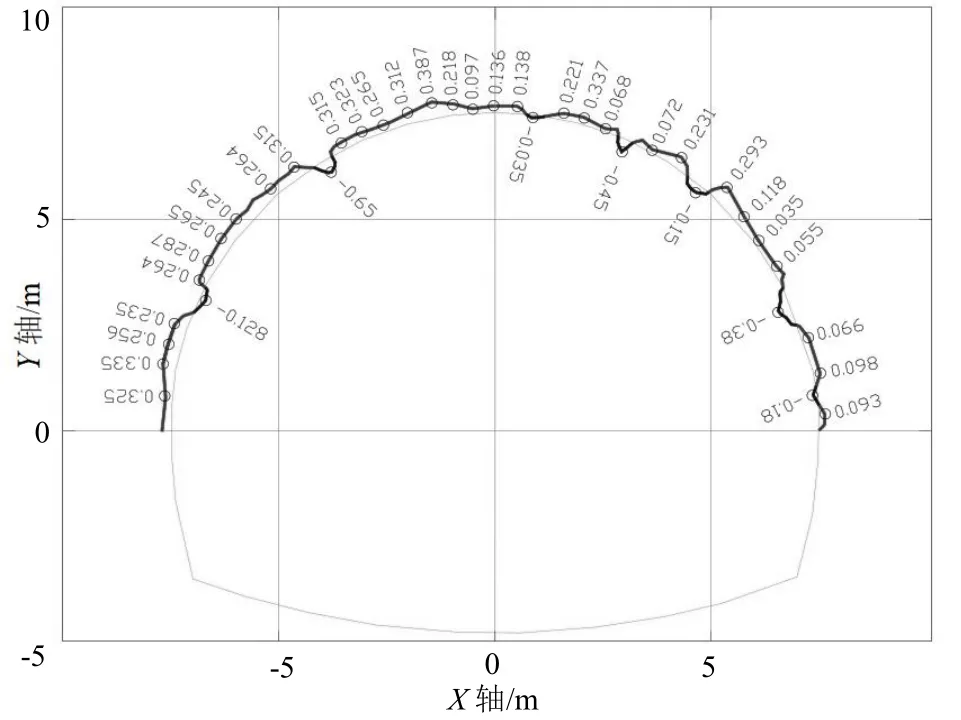
图6 隧道超欠挖值对比计算
4.3 隧道超欠挖面积
隧道断面超欠挖面积是指实际开挖断面在设计轮廓线以外和以内部分的面积。对比较模型与参考模型进行布尔减法运算,从实际开挖隧道三维模型中减去设计隧道三维模型,并进行一定的误差处理,系统统计2 个模型内外相差面积,采用全局坐标系下系统平面分割断面获得比较截面,可计算出隧道超欠挖面积,如图7 所示。其中超挖面积为3.17 m2,欠挖面积为2.97 m2。

图7 隧道超欠挖面积对比计算
4.4 隧道超欠挖体积
截取指定开挖距离超欠挖模型,通过求解一定进尺内实际隧道三维模型到设计隧道三维模型平面体积,可计算隧道超欠挖体积量。本次测试隧道段K31+325—K31+335 超挖体积为 7.31 m3。
4.5 结果分析
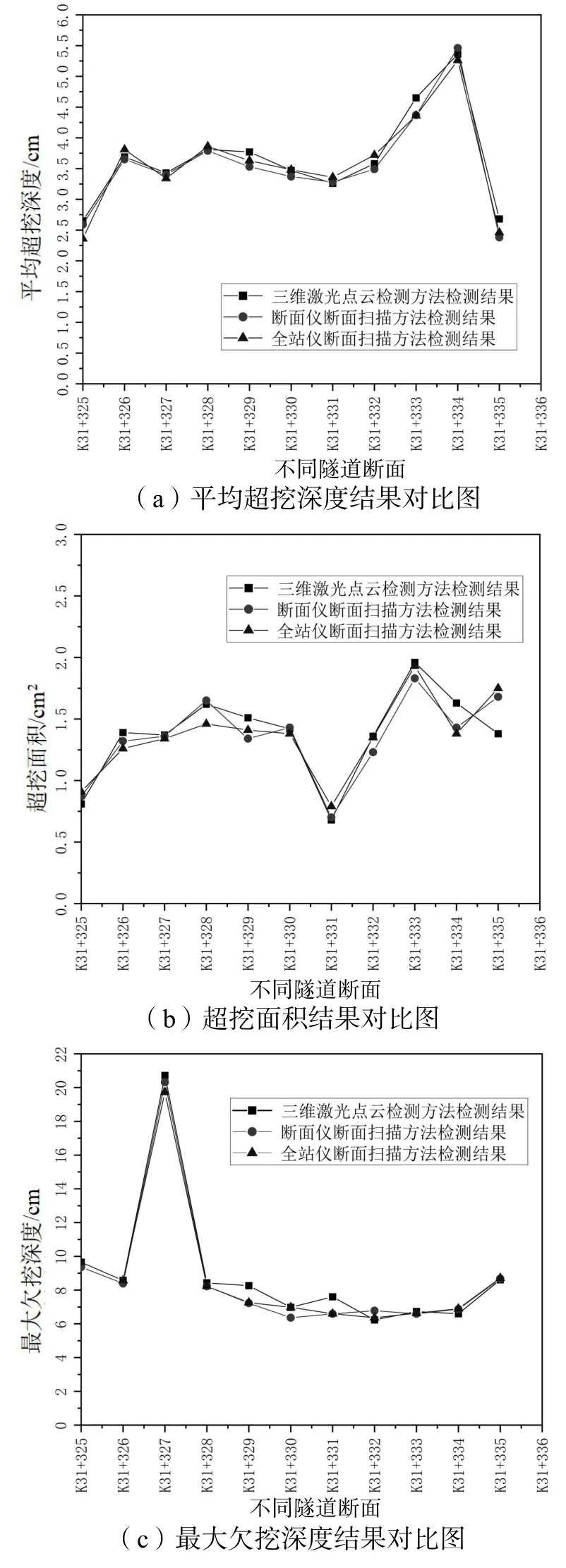
在10 m 隧道段试验范围内,同时运用断面仪和全站仪及三维激光扫描检测方法进行检测,通过对比11个不同断面3 种检测方法下的平均超挖深度、超挖面积、最大欠挖深度和最大超挖深度,分析验证三维激光扫描的精度和可靠度,3 种检测方式数据对比结果如图8 所示。从图中可以看出,3 组数据大小相近,折线图相似,说明3 种检测方法结果差距较小,表明基于三维激光扫描的隧道检测方法有较好的可靠度,且最大超挖和欠挖深度均小于25 cm,表明现场施工质量较好,符合设计要求。
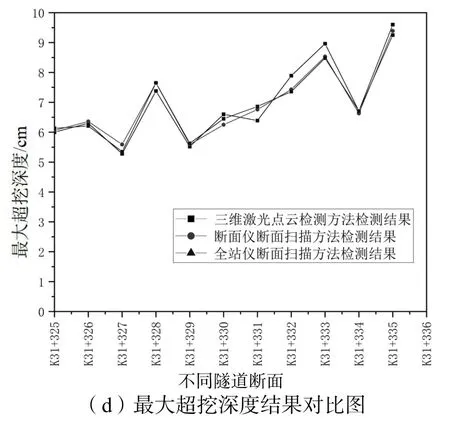
图8 3 种检测方式检测结果对比图
5 结论
本文利用三维激光扫描技术,对本次试验隧道K31+325—K31+335 标段进行扫描,得出隧道的三维点云数据,对实际点云数据进行拼接、去噪、曲面重建后,将其与设计断面进行对比,实现了隧道的超欠挖分析。再把分析后得到的超欠挖深度、面积计算结果,与全站仪检测、断面仪检测结果进行对比,对比发现3 种方法的检测结果都符合规范要求,表明隧道施工效果良好,而且3 个检测结果之间的差距很小,表明基于三维激光扫描的隧道检测方法有较好的可靠度。综上所述,三维激光扫描技术使隧道信息获取与处理更为便捷、高效、可靠,能为隧道设计、施工提供有力支持,具有广阔的应用前景。
猜你喜欢
建材发展导向(2022年20期)2022-11-03
新疆钢铁(2021年1期)2021-10-14
西部交通科技(2021年9期)2021-01-11
智富时代(2019年8期)2019-09-23
智富时代(2019年8期)2019-09-23
时代英语·高一(2019年5期)2019-09-03
环境(2019年4期)2019-04-20
数学大世界(2018年16期)2018-07-30
卷宗(2017年16期)2017-08-30
大灰狼(2009年7期)2009-08-26
