
A Fuzzy Clustering Algorithm Based on Multipath Component Trajectory for Millimeter Wave Radio Channels
2022-11-18 07:57FeiDuYuZhangQingliangLiXinyueZhangBoZhuZihaoFuSuiyanGengXiongwenZhao
China Communications 2022年11期
Fei Du,Yu Zhang,*,Qingliang Li,Xinyue Zhang,Bo Zhu,Zihao Fu,Suiyan Geng,Xiongwen Zhao
1 State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources,School of Electrical and Electronic Engineering,North China Electric Power University,Beijing 102206,China
2 Hebei Key Laboratory of Power Internet of Things Technology,North China Electric Power University,Baoding 071003,Hebei,China
3 National Key Laboratory of Electromagnetic Environment,China Research Institute of Radiowave Propagation,Qingdao 266107,China
Abstract: Time-varying channel modeling plays an important role for many applications in time-variant scenarios,while most clustering algorithms focus on static channels and cannot accurately model the channel time-evolution properties.In this paper,a fuzzy clustering algorithm based on multipath component(MPC) trajectory is proposed.Firstly,both the distance and velocity similarities of the MPCs in different snapshots are taken into account to track the MPC trajectory,in which the fuzzy scheme and a kernel function are used to calculate the distance and velocity similarities,respectively.Secondly,a fuzzy MPC trajectory clustering algorithm is proposed to cluster the MPCs in multiple snapshots.The MPCs in a snapshot are clustered according to the membership,which is defined as the probability that a MPC belongs to different clusters.Finally,time-varying channels at 28 GHz are simulated to validate the performance of our proposed algorithm.The results show that our proposed algorithm is able to accurately identify the clusters in time-varying channels compared with the existing clustering algorithms.
Keywords: channel modeling; time-varying; clustering;multiple path component;MPC trajectory;6G
I.INTRODUCTION
The sixth generation(6G)communication is expected to exploit mmWave and sub-THz frequencies,as the broad bandwidth combined with (ultra) massive antenna arrays help to meet higher data rate demands[1],while the wireless channels in high frequency bands exhibit sparse structures [2,3].The cluster-based channel model can well balance the channel modeling accuracy and complexity.Thus,multipath components (MPCs) clustering algorithm has also be an important research topic in 6G.
Time-varying channel modeling has attracted more attention in channel research,such as vehicle-tovehicle(V2V)communication in the intelligent transportation system [4,5],unmanned aerial vehicle(UAV) communications [6].There are many clustering algorithms that have been proposed to implement the MPCs clustering as reported in [7].However,so far,most clustering algorithms are applied in static channels,where the clusters are identified only considering the MPCs parameters in an estimated snapshot.In [8],the K-means [9]was extended to the K-power-means (KPM) algorithm by taking into account the power of MPCs.In KPM,the cluster centroids are calculated and updated at each algorithm iteration.In[10],by considering the multipath component distance (MCD) [11],the fuzzy-c-mean (FCM)algorithm was proposed to identify clusters by calculating the memberships of MPCs belonging to different clusters.The above cluster identification scheme is mainly based on the “distribution distance” of MPCs in the channel multi-dimensional attribute space to implement clustering,the similarity between MPCs is measured by using various distances (such as Euclidean distance or MCD).In addition,several studies achieve cluster identification based on the “distribution density” of MPCs.In [12],the kernel-powerdensity(KPD)algorithm was proposed to measure the MPCs density based on the density-based spatial clustering for applications with noise (DBSCAN) algorithm [13],in which the clusters are identified based on the kernel density of MPCs.In [14],the support vector machine assisted adaptive KPD(SVM-AKPD)algorithm was proposed to calculate the cluster centroids accurately by anadaptive-K,where the SVM is used to cluster MPCs by the full partition of channel feature space.Another new method based on statistical distribution of MPCs is popular in channel clustering.In[15],the Gaussian mixture model(GMM)was applied to channel clustering and the MPCs power was coupled to the objective function as a weighting factor by considering the mean and variance of MPCs,so that the MPCs parameters can be fitted effectively to identify clusters.The reference [16]further proposed a GMM clustering algorithm based on the hybrid differential evolution expectation maximization (DE-EM)algorithm.It used the DE algorithm to initialize the GMM parameters,and then applied the EM algorithm to find the optimal GMM parameter set,which can effectively improve the estimation accuracy of the cluster parameters and distinguish the clusters to be better match with channel propagation characteristics.
In time-varying channel modeling,it is necessary to cluster MPCs not only in each snapshot,but also to analyze the dynamic changes for each cluster in successive snapshots.Most of the existing timevarying channel dynamic clustering algorithms identify the MPCs in each snapshot statically first,and then track the cluster centroids in successive snapshots,i.e.,“identify first and track later”.In[17],the KPM algorithm was used to identify clusters in each snapshot,and MCD was used to measure the similarity between different cluster centroids in two successive snapshots to track the cluster trajectories.In[18],the Kalman filter (KF) was used to learn the trajectories of cluster centroids and predict their parameters in the next snapshot.Although the algorithms proposed in [17]and [18]implemented the cluster centroids tracking,its clustering principle is still essentially static,which ignores time evolution of the MPCs.Another clustering algorithm is to identify and track clusters simultaneously,i.e.,“joint tracking and identification”.In[19],an online angular power spectrum (APS) based clustering algorithm was proposed for identifying the main clusters in current channel,and an image processing algorithm was used to identify the real-time channel APS without high precision parameter extraction.In[20],a dynamic cluster algorithm was proposed based on the fluctuation and multidimension distance of MPC trajectories.Based on the time-varying MPC trajectory algorithm,the authors in[21]proposed a MPC tracking algorithm,in which MPC trajectory tracking is first implemented,and a MPC trajectory similarity metric was then proposed by considering two different cases regarding the MPC trajectory distance metrics.The algorithm in[21]considers only the MPC distance to measure the similarity of MPCs.However,to further model the timeevaluation properties of dynastic channels,the“velocity”of MPCs(i.e.,the changes of MPCs in successive snapshots)should be taken into account.
Motivated by existing works,a fuzzy clustering algorithm based on MPC trajectory is proposed in this paper.Firstly,both the MPCs distance and velocity similarities are calculated to track the MPC trajectory.In the MPC trajectory tracking algorithm,fuzzy scheme is used to calculate the membership of MPCs in two successive snapshots,in which an individual MPC is considered belonging to more than one trajectories and the membership is used to measure the distance similarity of MPCs in different snapshots.Moreover,MPC velocity is defined as a measure of the MPC trajectory change,and both previous and future MPCs are utilized to calculate the membership of the estimated snapshot.Then,a fuzzy MPC trajectory clustering algorithm is proposed to assign MPC trajectories to different clusters based on the membership.Finally,simulation channels at 28 GHz by quasi-deterministic radio channel generator(QuaDRiGa)[22]are utilized to validate the performance of our proposed algorithm with the clustering validation index.The results show that it can capture the time-evolution features of clusters and has superior clustering performance than the reported KPM and SVM-AKPD algorithms.It should be noted that due to the consideration of the variation of MPCs between adjacent snapshots,the computational complexity of the proposed algorithm is higher than that of traditional clustering algorithms.
The remainder of the paper is organized as follows.Section II describes the double-directional multipath channel and related traditional clustering algorithms.Section III introduces the proposed algorithm.Section IV is the performance evaluation.Finally,conclusion is drawn in Section V.
II.PROBLEM STATEMENT
In this section,we first introduce the cluster-based channel model.Then,the baseline algorithms used in this paper,namely,the KPM and SVM-AKPD algorithms are briefly summarized.
2.1 Cluster-Based Channel Model
In this paper,the double-directional channel model[23]is applied.The channel impulse response for snapshotscan be expressed in Eq.(1),which is relevant to its powerαs,delayτs,azimuth angle of departure (AoD) ΘT,s,elevation angle of departure(EoD) ΩT,s,azimuth angle of arrival (AoA) ΘR,s,elevation angle of arrival(EoA)ΩR,sand Dopplervs,
where
•sis the snapshot number,MsandLm,sare the number of clusters and MPCs in them-th cluster in thes-th snapshot,respectively,
•τm,s,ΘT,m,s,ΘR,m,s,ΩT,m,sand ΩR,m,sare the delay,AoD,AoA,EoD and EoA of them-th cluster in thes-th snapshot,respectively,and the subscripts T and R represent transmitter and receiver,respectively,
•τm,l,s,ΘT,m,l,s,ΘR,m,l,s,ΩT,m,l,s,ΩR,m,l,sandvm,l,sare the excess delay,excess AoD,excess EoD,excess AoA,excess EoA and Doppler of thel-th MPC in them-th cluster in thes-th snapshot,respectively,
•αm,l,sejϕm,l,sejπvm,l,sis the complex amplitude(gain)of thel-th MPC in them-th cluster in thesth snapshot,whereαm,l,s,ϕm,l,sandvm,l,sare the absolute amplitude,the phase in the range[0,2π]and the Doppler,
•δ(·)is the Dirac delta function.
Define Φ={xl,s|l=1,2,··· ,Ls}as the set of all MPCs in thes-th snapshot,Lsis the total number of MPCs,xl,sis the parameters set for thel-th MPC in thes-th snapshot,expressed as:
where the MPC parameters in thes-th snapshot can be obtained by using high-resolution algorithm,e.g.,space-alternating generalized expectationmaximization (SAGE) [24],RiMAX [25]or other multipath estimation algorithms[26,27].
2.2 KPM Algorithm[8]
Based on the K-means algorithm,the KPM algorithm iteratively updates cluster centroids in the data space by minimizing the total difference between the MPCs and their closest centroid.The main steps are as follows:
1.ChooseMMPCs from the date set Φ and consider them as the initial cluster centroids.
2.Allocate MPCs to cluster centroids by minimizing the total sum of distance between the MPC,where the basic distance function is the power weighted MCD.
3.Update the cluster centroids according to the MPCs inside the cluster.
4.Repeat steps 2) and 3) until the algorithm converges.
KPM is a popular clustering algorithm with low complexity.However,the performance of its final clustering results is determined by the initialization of the cluster centroids.In addition,KPM requires a priori information on the number of clusters,making it has to manually adjust the parameter for different estimated dataset.
2.3 SVM-AKPD Algorithm[14]
The SVM-AKPD algorithm is an extension of the KPD,which uses the optimal hyperplane to separate different clusters into the feature space.The implementation of the SVM-AKPD algorithm consists of two stages:
1.Calculate the key MPCs as initial cluster centroids.Firstly,a distance-based matric [28]was proposed to calculateadaptive-Kfor each MPC.Then,the initial cluster centroids are calculated to train the SVM classifiers.
2.Train the SVM classifiers to cluster MPCs.The initial cluster centroids are considered as labeled key MPCs to train the SVM classifiers,where one-versus-rest (OvR) SVM algorithm reconstructs a multi-class classifier from binary SVMbased classifiers.
After the above two stages,the MPCs will be clustered into different feature space.The SVM-AKPD algorithm does not require prior knowledge of clusters,such as number and initialization.Nevertheless,both the SVM-AKPD and KPM algorithms only consider the static snapshots to implement clustering process,and ignore the time-evolution properties of channels.For time-variant channels,the SVM-AKPD and KPM algorithms cannot identify the clusters effectively when there exist overlapping cluster trajectories,and the behaviors of MPCs in multiple snapshots should be considered.
III.PROPOSED CLUSTERING ALGORITHM
As we explained,most clustering algorithms consider only the estimated snapshot to implement clustering,which is not suitable for the time-variant channels,because they would be invalid when the cluster trajectories are overlapping for some special snapshots.To solve this problem,a fuzzy clustering algorithm is proposed in this paper.Both the distance and velocity similarities are used to track the MPC trajectory by considering multiple adjacent snapshots.And the MPC trajectory clustering centroids are calculated by considering all snapshots.Therefore,the timeevaluation behavior can be accurately modeled.However,compared with the traditional algorithms,the MPCs trajectory tracking increases the complexity of the proposed algorithm.
3.1 MPC Trajectory Tracking Algorithm
Fuzzy scheme[29]is a division-based algorithm,and its idea is to make the maximum similarity between objects classified into the same cluster and the minimum similarity between different clusters.Define that the parameters of MPC in thes-th snapshot are xs={x1,s,x2,s,··· ,xL,s},then the set of all MPCs for the totalSsnapshots is defined as follow,
We defineui,jas the membership,i.e.,distance similarity,of representativeness of trajectory from thei-th MPCxi,sin thes-th snapshot to thej-th MPC in the(s+1)-th snapshot.The schematic diagram of MPC trajectory tracking algorithm is shown in figure 1.
The objective of the MPC trajectory tracking is to maximize the similarity between MPCs classified into a trajectory and minimize the similarity among different trajectories,which can be described as follow,
wherec ∈[1,+∞)is the weighting exponent controlling the fuzziness among clusters.Usually,the valid range forcis[1.5,2.5][30].di,jrepresents the dissimilarity between thei-th MPCxi,sin thes-th snapshot and thej-th MPCxj,s+1in the(s+1)-th snapshot,
where∥•∥is a distance matric,usually selected as Euclidean distance.
In Eq.(4),the membership is the tracking probability fromxi,stoxj,s+1,thus we haveui,j=1,ui,j >0.The optimal solution of Eq.(4)is as follow,
Proof.See Appendix A
In fact,the principle of MPC trajectory tracking is based on the instantaneous differences between successive snapshots.Thus,the membership only considers instantaneous features in each snapshot.However,the distance similarity cannot describe the changes of MPC trajectory when the MPC trajectories are overlapping in some special snapshots.Therefore,we further propose the concept of MPC velocity similarity associated with the MPC trajectory to model the MPC time-evolution behavior.
Suppose that the information for MPC trajectory in the past time is available,in the interval[s−1,s],the velocity ofxi,sis defined as follow,
Similarly,in the estimated interval [s,s+1],the velocity betweenxj,s+1andxi,sis defined as follow,
Then,we consider a metric to describe the dynamic features in each time interval performing the MPC trajectory,thus,the velocity similarity betweenxj,s+1andxi,sis calculated by,
For the MPC trajectory,the successive observations are dependent,i.e.,the set of observed snapshot holds the strict monotonic ordering property,and any permutation of the snapshots will destroy this natural dependence.Thus,the velocity difference between the MPCs belonging to the same trajectory is small,and the velocity difference between the MPCs belonging to different trajectories is large.In this case,the velocity similarity calculated by Eq.(9) is available when measuring the velocity difference between different trajectories.However,such linear case is not true when different trajectories are overlapping.Therefore,an exponential function is chosen as kernel function to perform a nonlinear transformation of velocity similarity,so that the velocity similarity becomes sharply smaller as the MPCs velocity difference decreases.Then,the velocity similarity is defined as follow,
whereσdetermines the width of the exponential function.
Figure 2 shows the basic idea of the velocity similarity calculation method.It should be noted that velocity similarity is difficult to be described by figure due to high dimensions of the MPC parameters,so we qualitatively describe the velocity similarity in terms of the angle between the MPC velocities.In figure 2,the lines represent the MPCs trajectory,and lines with arrow represent the MPCs velocity(i.e.,the changes of MPCs)between different snapshots,where A represents the velocity angle between black and red dots(i.e.,MPCs),and B represents the velocity angle between blue and red dots,in the estimated interval[s,s+1].It is obvious that the difference between A and B becomes more significant benefitting from the exponential function.
To take both the distance and velocity similarities into account,the membership between thei-th MPCxi,sin thes-th snapshot and thej-th MPCxj,s+1in the(s+1)-th snapshot is defined as follow:
whereηis the factor betweenui,janduvi,j.Then we will analyzewi,jfrom two aspects.(1) the MPC trajectories are overlapping.In this case,it is obvious that the value ofui,jbetween trajectories are similar,so the value ofwi,jis mainly determined by theuvi,j.(2)the MPCs trajectories are not overlapping.As we can see from figure 2,in this case,the value ofuvi,jis almost equal to zero,so the value ofwi,jis mainly determined by theui,j.Therefore,by combiningui,janduvi,jin Eq.(11),the tracking accuracy can be improved by considering both the MPCs distance and velocity similarities.
Due to the channel sparsity of millimeter wave,the MPCs belonging to the same cluster in successive snapshots have similar parameters.The membership of MPCs calculated by Eq.(11)in the same cluster is similar,which makes it possible for some MPCs to belong to more than one trajectory,while MPCs are expected to belong to only one trajectory.To solve this problem,we considerwi,jas the probability when the MPCs are moving,and KM algorithm[31]is adopted to maximize the total probabilities of all selected trajectories,as follow,
whereψi,jrepresents the trajectory from thei-th MPCxi,sin thes-th snapshot to thej-th MPCxj,s+1in the(s+ 1)-th snapshot,wi,jis the moving probability ofψi,j,Ψ is the set of tracking results in the interval [s,s+1],where each MPC only belongs to one trajectory.The KM algorithm is commonly used to find the maximum weight perfect matching combination in the bipartite graph matching problem.In a bipartite graph,all nodes are divided into two sets and mapped to each other,each path has different weights.In our proposed algorithm,the MPCs in the estimated interval [s,s+1]are considered as the nodes in bipartite graph,and the moving probability is the path weight.In addition,the number of MPCs in successive snapshots is allowed to be different by the use of fuzzy scheme and KM algorithm,which matches the dynamic channels.In particular,the MPCs that are not associated with others are considered as“birth”MPCs or“death”MPCs.
3.2 MPC Trajectory Clustering Algorithm
In this subsection,a fuzzy clustering algorithm is proposed to cluster the MPC trajectories.Define xl={xl,1,xl,2,··· ,xl,S}as the parameter set of thel-th MPC trajectory.Then,the distance between thel-th MPC trajectory andm-th cluster centroid trajectory is specified by,
wherehm,sis them-th cluster centroid in thes-th snapshot,the dissimilarity is a sum squared Euclidean distances between the MPCs and centroids in each snapshot.Then the objective of the algorithm is to minimize the in-group sum of squared errors as follows,
whereul,cis the membership degree between thelth trajectory andm-th cluster centroid trajectory,Mis the total number of clusters in each snapshot.Mdetermines how many clusters will be distinguished,and the optimumMcan be calculated by combined validation to improve the performance of the algorithm.Then,for each MPC trajectory,the membership vector isul={ul,1,ul,2,...,ul,M},and membership matrix is U={u1,u2,...,uL}.The optimal solution of Eq.(14)is as follows,
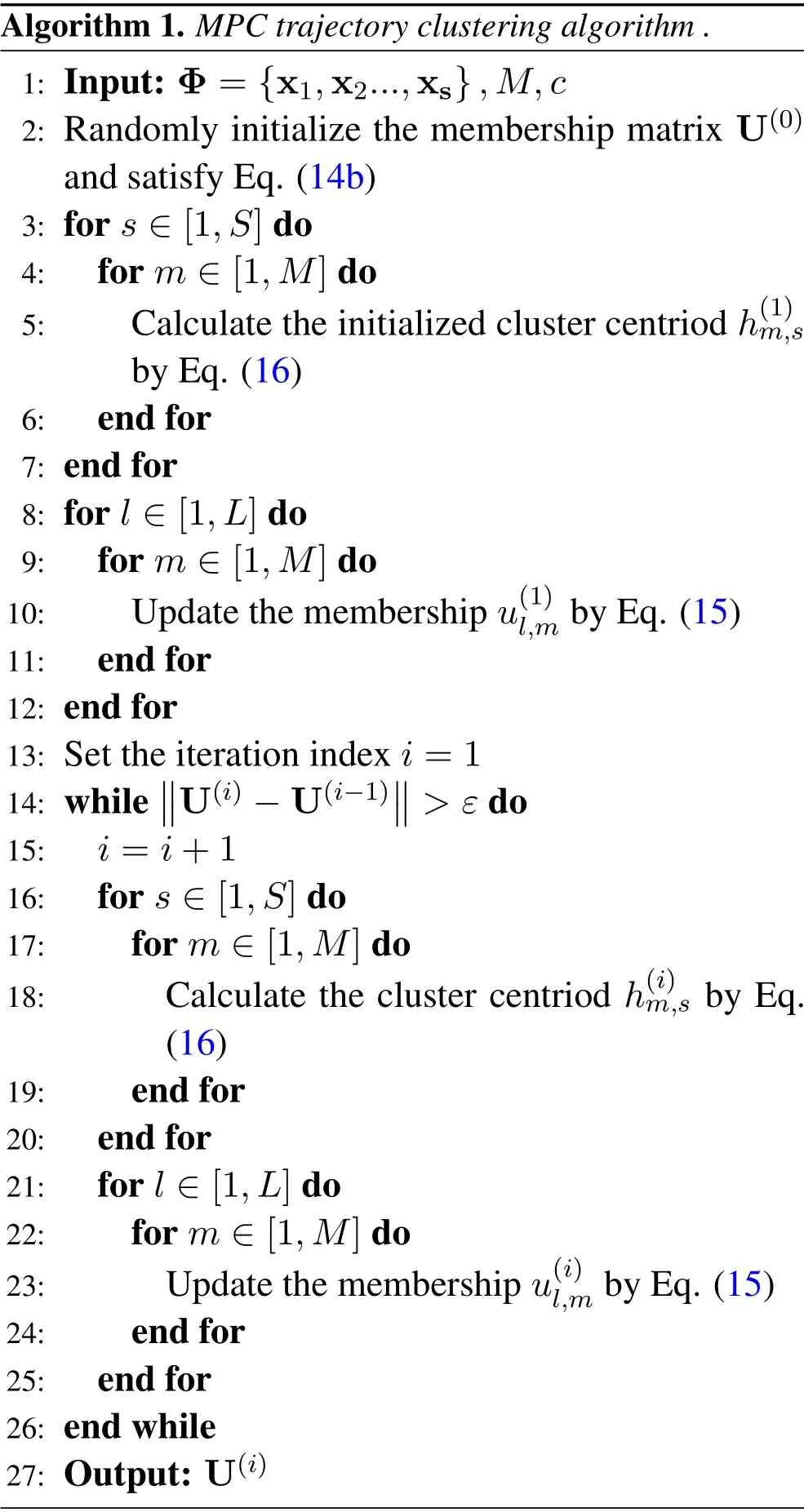
Algorithm 1.MPC trajectory clustering algorithm.1: Input: Φ={x1,x2...,xs},M,c 2: Randomly initialize the membership matrix U(0)and satisfy Eq.(14b)3: for s ∈[1,S]do 4: for m ∈[1,M]do 5: Calculate the initialized cluster centriod h(1)m,s by Eq.(16)6: end for 7: end for 8: for l ∈[1,L]do 9: for m ∈[1,M]do 10: Update the membership u(1)l,m by Eq.(15)11: end for 12: end for 13: Set the iteration index i=1 14: while‖‖U(i)−U(i−1)‖‖>ε do 15: i=i+1 16: for s ∈[1,S]do 17: for m ∈[1,M]do 18: Calculate the cluster centriod h(i)m,s by Eq.(16)19: end for 20: end for 21: for l ∈[1,L]do 22: for m ∈[1,M]do 23: Update the membership u(i)l,m by Eq.(15)24: end for 25: end for 26: end while 27: Output: U(i)
Proof.See Appendix B
The pseudocode of MPC trajectory clustering algorithm is presented in Algorithm 1.
IV.PERFORMANCE EVALUATION
In this section,we use the simulated channel data to evaluate the clustering performance based on our proposed algorithm.Firstly,we briefly introduce the millimeter channel simulation platform and simulation campaigns.Then,the comparison and validation of our proposed algorithm are presented with several baseline clustering algorithms,including the KPM and SVM-AKPD.
4.1 Quasi-Deterministic Simulation Model
The QuaDRiGa channel model follows geometrybased stochastic channel modeling approach,which allows the creation of an arbitrary double directional radio channel.An important feature of QuaDRiGa is the implement of drifting model to characterize the channel time evolution properties.The drifting model achieves smooth evolution of small-scale parameters over small time intervals as receiver(Rx)moves.The positions of the scatterers are fixed when Rx moves within the segment.Therefore,the small-scale parameters of each snapshot can be calculated based on the Rx trajectory parameters according to geometric method.Figure 3 shows the layout of channel simulations,where the x,y and z axes represent the length,width and height of the simulation scenario,respectively.The heights of transmitter(Tx)and Rx are set to 10 m and 2 m,respectively,and vertically polarized omni-directional antennas are assumed at both Tx and Rx.Three clusters are set here,and first-bounce scatterers(FBS)and last-bounce scatterers(LBS)are considered.The detailed simulation method can be found in[32]and[33].
4.2 Algorithm Validation
In this subsection,we first analyze the impact of velocity similarity on the performance of the MPC trajectory tracking algorithm.Totally 30 snapshots are generated by QuaDRiGa,and there are 4 MPCs included in each channel.The weighting exponentcin Eq.(4) is set to 2,and the parameters of MPCs used to calculated the MPC distance include the delay,AoA and EoA.figure 4 shows the tracking results of MPC trajectory based on different membership calculation methods.Since the MPC trajectory 1 is line-of-sight and the receiver moves in a limited range,the angle for MPC trajectory 1 varies slightly.It can be seen that there is an overlap between the MPC trajectories 2 and 4 in the range of snapshot number [10,20],while the MPC trajectories 1 and 3 are completely separated in all snapshots.In figure 4a,the MPC trajectories 1 and 3 can be distinguished accurately,and the membership only considering the distance can also effectively track the MPC trajectory.However,the MPC trajectories 1 and 3 are mis-tracked at the intersection of the trajectories circled with black ellipse,while the distance similarity cannot describe time-evolution properties of the MPC trajectory.It should be noted that only the AoA and EoA parameters are displayed in the figure,thus,the positions of MPCs in the figure can only relatively represent the distance between the MPCs(delay is not shown).Conversely,the MPCs can be tracked accurately in all snapshots in figure 4b,this is because the membership with the MPC velocity is taken into account of time evolution of the channels.As we mentioned that the membership is mainly determined by the MPC velocity when the MPCs belonging to different trajectories are close in the feature space.The results prove the necessity of the utilization of MPC velocity in the proposed MPC trajectory tracking algorithm.
Furthermore,totally 50 simulated snapshots are generated by QuaDRiGa to validate the clustering performance of our proposed MPC trajectory clustering algorithm compared with traditional KPM and SVMAKPD algorithms.It should be noted that only 3 clusters and 5 sub-MPCs are considered in each channel here to clearly show the time-varying MPCs clustering results,while only 4 MPCs are considered in figure 4 to clearly show the time-varying MPC trajectory tracking results.Firstly,we use several traditional algorithms to cluster MPCs in each snapshot,in which the clustering process of different snapshots do not affect each other.figures 5a and 5b show the clustering results for all snapshots calculated by the KPM and SVM-AKPD algorithms,respectively.The markers in different colors represent different clusters.Especially,due to the movement of Rx or scatterers,all three clusters are overlapping for some particular snapshots.It is obvious that both the KPM and SVMAKPD algorithms can distinguish the clusters accurately when the cluster trajectories are separated.The clustering results of SVM-AKPD outperform KPM because the performance of KPM depends on its initialization,while SVM-AKPD can accurately distinguish clusters without manually adjusting the clustering parameters.However,the performance of SVMAKPD algorithm is not significantly better than that of KPM,because the MPCs in simulated channels are well-distributed.However,for the MPCs overlapping in some snapshots,due to MPCs belonging to different clusters have similar channel parameters,it is difficult to classify those MPCs into different clusters using either the SVM-AKPD or KPM algorithms.It should be noted that the clustering results in figure 5 are taken into account of the delay,AoA and EoA parameters,and here only the the AoA are displayed for clearly showing the results.
Figure 6 shows the clustering results calculated by our proposed algorithm.The weighting exponentcand cluster numberMin Eq.(14) are set to 2 and 3,respectively.In order to fully demonstrate the superiority of the algorithm,the clustering results are displayed by delay,AoA and EoA features in figures 6a,6b and 6c,respectively.Due to the EoA of MPCs is about in the range of 40 degrees,the cluster pattern is not obvious in the EoA,while three cluster trajectories can be clearly observed in the delay and AoA.As we can see from figure 6,the cluster trajectories can be classified accurately by using our proposed algorithm.This is benefited from two aspect: (1) The MPC velocity is applied to track its trajectories,which gives a new feature for the MPCs parameters according to the Rx or scatterers moving.(2) By considering channel time-evolution,the proposed MPC trajectory clustering algorithm takes into account of time-varying properties of clusters,in which the cluster centroids are calculated dynamically by using fuzzy clustering algorithm.
Figure 7 shows the CDF comparison of Xie-Beni [34]index with different cluster algorithms for all snapshots,including the proposed algorithm,KPM and SVM-AKPD algorithms.The Xie-Beni index represents the compactness to separation ratio of clusters,whose definition can be found in [34].As we can see from the figure,the proposed algorithm offers the best performance.It is worth noting that when the clusters are not overlapping,the differences in the clustering results with different algorithms are small.Although almost 70% values of the Xie-Beni index are similar in figure 7,the traditional clustering algorithm cannot obtain the time-varying properties of clusters.In addition,the clustering algorithm proposed in this paper can achieve more accurate clustering results for time-varying channels,while the computational complexity is relatively high.Specifically,the complexity of the proposed algorithm isO((LM2IA+L3)(S−1)+LM2IO),whereIAis the iteration number of calculating membership by Eq.(6),andIOis the iteration number of calculating membership and cluster centroids by Eq.(15)and Eq.(16),respectively.The complexity of KPM algorithm isO(SLMIk),whereIKis the iteration number of updating loop.The complexity of SVM-AKPD algorithm isO(S(3L2+2LM+M2)).
V.CONCLUSION
In this paper,a fuzzy clustering algorithm based on MPC trajectory are proposed to implement timevarying channel clustering.The key features of the proposed algorithm are: 1) by considering both the distance and velocity similarities among MPCs in different snapshots,the MPC trajectory behavior can be accurately modeled.2) the problem of tracking the potential MPC trajectory is solved by maximizing the total membership of MPCs,and the KM algorithm is used to find the optimum tracking results.3)the MPC trajectory is clustered based on the fuzzy scheme,in which the various membership can describe the MPC trajectory effectively.4) Time-varying simulation channels at 28 GHz are used to generate synthetic MPCs to test the proposed algorithm,and the results show that our proposed algorithm outperforms than other algorithms and presents the best clustering performance.Our proposed fuzzy clustering algorithm based on MPC trajectory can capture the channel timeevolution properties,which is very useful in modeling of future 6G radio channels.
ACKNOWLEDGEMENT
This work was supported by the National Key Laboratory of Electromagnetic Environment (No.202101004),and the National Nature Science of China(NSFC)(No.61931001),respectively.
APPENDIX
A.Proof
Eq.(4) can be solved by using Lagrange multipliers,we therefore consider the following Lagrange function:
whereλis Lagrange multiplier.Then,set the firstorder derivates with respect toui,jandλequal to zero yields in Eq.(18) and Eq.(19).Finallyui,jcan be calculated from Eq.(18)by considering Eq.(19).
B.Proof
Eqs.(14)-(16) can be solved using Lagrange multipliers,we therefore consider the following Lagrange function:
Set the first-order derivates with respect toul,m,hm,sandλequal to zero yields in Eq.(21),Eq.(22) and Eq.(23).Then,ui,jcan be calculated from Eq.(21)by considering Eq.(23),hm,scan be calculated from Eq.(22).
- China Communications的其它文章
- Environment Information-Based Channel Prediction Method Assisted by Graph Neural Network
- Multi-Scenario Millimeter Wave Wireless Channel Measurements and Sparsity Analysis
- AG Channel Measurements and Characteristics Analysis in Hilly Scenarios for 6G UAV Communications
- Long-Range VNA-Based Channel Sounder: Design and Measurement Validation at MmWave and Sub-THz Frequency Bands
- A Novel Millimeter-Wave Channel Measurement Platform for 6G Intelligent Railway Scenarios
- A Geometry-Based Stochastic Scattering Channel Model for V2V Communications in Dense Urban Street Environments