
AG Channel Measurements and Characteristics Analysis in Hilly Scenarios for 6G UAV Communications
2022-11-18 07:57ChongyangYuYuLiuHengtaiChangJingfanZhangMengjiaoZhangPeterPoechmuellerChengxiangWang
China Communications 2022年11期
Chongyang Yu,Yu Liu,*,Hengtai Chang,Jingfan Zhang,Mengjiao Zhang,Peter Poechmueller,Chengxiang Wang
1 School of Microelectronics,Shandong University,No.1500,Shunhua Road,Gaoxin District,Jinan 250101,China
2 National Mobile Communications Research Laboratory,School of Information Science and Engineering,Southeast University,No.2,Sipailou,Xuanwu District,Nanjing 210096,China
3 Purple Mountain Laboratories,No.9,Mozhou East Road,Jiangning District,Nanjing 211111,China
Abstract: As an important part of sixth generation (6G) integrated space-air-ground-sea networks,unmanned aerial vehicle(UAV)communications have aroused great attention and one of its typical application scenarios is the hilly environments.The related UAV air-ground(AG)channel characteristics analysis is crucial for system design and network evaluation of future UAV communications in hilly scenarios.In this paper,a recently conducted channel measurements campaign in a hilly scenario is presented,which is conducted at the center frequencies of 2.585 GHz and 3.5 GHz for different flight trajectories.Based on the measurement data,some key channel characteristics are analyzed,including path loss(PL),shadow fading(SF),Rician K-factor,root mean square (RMS) delay spread (DS),and temporal auto-correlation function(ACF).Finally,the comparison of typical channel characteristics under circular and straight trajectories is given.The related results can provide a theoretical reference for constructing future UAV communication system in hilly scenarios.
Keywords: UAV communications; channel measurements;channel characteristics;hilly scenarios;6G
I.INTRODUCTION
With the rapid deployments of the fifth generation(5G) wireless networks worldwide,the related research for the sixth generation(6G)wireless communications has been carried out gradually.In order to achieve global coverage,6G wireless communication networks will be expanded from land mobile communication to space-air-ground-sea integrated communication networks[1,2].As a critical component of integrated networks,the unmanned aerial vehicle (UAV)based air-ground (AG) communication has attracted more attention.Due to the advantages of high maneuverability,adaptability,and low cost,UAV communications have an extensive range of applications in civil and commercial fields,including the weather monitoring,forest fire detection,traffic control,cargo transportation,emergency search and rescue,communication relay et al [3,4].The UAV communications in hilly scenarios is one of the typical UAV application scenarios.Therefore,to better design,test,and evaluate the future UAV communications systems in hilly scenarios,an in-depth understanding of UAV AG channel which can mimic the real channel characteristics is crucial.
Channel measurements can provide first-hand information of channel,and based on the measured data,accurate and effective empirical channel models can be established.The relevant UAV AG channel measurement campaigns and modeling works were discussed in [5].Different from other communication systems,the transmitter (Tx) and receiver (Rx)in the UAV-based AG communication system move freely and it has relatively fixed scatterer environments.Thus,the UAV-based AG channel has its unique channel characteristics.The relevant factors affecting measurement campaigns were provided in[6],including measurement equipment,UAV flight direction,and measurement frequency bands.In the past few years,UAV AG channel measurement campaigns were widely conducted.For instance,the article [7]collected downlink signals from long term evolution(LTE) networks in rural,urban,and suburban environments to conduct measurement campaigns,respectively.Measurement activities were conducted in rural microcell scenarios to study channel modeling for rural angle spread (AS) [8].The articles [9,10]conducted AG channel measurements in over-water scenarios,suburban and near-urban environments,the effect of fuselage shadow on channel propagation characteristics was discussed and the empirical model of fuselage shadow was also proposed in [11].The authors in [12]carried out measurement campaigns in hilly and mountain scenarios,but the large aircraft is inflexible and not suitable for low-altitude UAV communication applications.In [13],the authors performed ultra bandwidth channel measurements in hilly scenarios and studied typical channel characteristics including the path loss(PL),shadow fading(SF),root mean square(RMS)delay spread(DS),and RicianKfactor.However,the flight path studied by the author is relatively single.The existing UAV channel measurements and modeling were carried out in aboved typical scenarios [7–13],and still few measurement campaigns were conducted in hilly scenarios because of the complex environments,abundant scatterers,and difficult experiment conditions.
Another essential concern in AG channel measurements and modeling is the effect of UAV flight trajectory on the propagation channel.The study of the impact of different trajectories of UAV on AG channel signal transmission has a crucial role in the field of UAV communications.In [14],the authors proposed a time non-stationary model suitable for UAV AG channel,which provides a reference for UAV flying in any trajectory.In the past actual measurements,most of the measured trajectories focused on the linear flight of UAVs,especially the effect of vertical height on UAV channel propagation characteristics [15–19],and the altitude influence factor and path loss exponents (PLEs) were calculated.The results show that as the increase of height,the channel is closer to the line of sight (LOS) path case and the communication quality is better.Meanwhile,in[20–22],the authors investigated the effect of horizontal distance and vertical height on channel characteristics by considering both horizontal and vertical flight trajectories in suburban scenarios,and based on the the space-alternating generalized expectationmaximization (SAGE) results,the channel characteristics at different altitudes and horizontal distances were investigated in depth,and established a stochastic model.In addition,measurement campaigns of UAV hovering,blocking and circular flight were conducted in the open area,focusing on the antenna orientation [23].From the above articles,it can be seen that the research on UAV trajectories mainly focuses on the measurement of vertical and horizontal flights in open areas,with less research on other trajectories,and still lacks multi-trajectory measurements in hilly scenarios.Meanwhile,one problem is that the flexible movements of UAV bring the non-stationarity in time domain,the research on the non-stationary characteristics in terms of theoretical modeling is relatively sufficient.In [24–26],the non-stationary characteristics of the channel were investigated by theoretical modeling methods,and relevant theoretical models were proposed,and the non-stationary characteristics of UAV channels from the perspective of small-scale fading were analyzed in [27–30].But the theoretical modeling lacks practical validation.Therefore,in this paper,we analyze the non-stationary characteristics of the UAV AG channel through actual channel measurements.Another issue of concern is the measurement band,the influence of different frequency bands on channel characteristics was proposed in [16,18]and the measurements of mmWave bands were conducted in[31,32].Considering the severe attenuation of mmWave in AG propagation channel,the spectrum Sub-6 GHz still has a widespread application in future UAV communications.
According to the authors’ knowledge,the extensive UAV channel modeling and characteristics analysis for the hilly scenarios which consider the different flying trajectories,are still missing.Different from other UAV application scenarios,UAV communications in hilly scenarios has its own characteristics,such as dense scatterers,flexible mobility,and blocking effect.This paper provides a Sub-6 GHz UAV AG channel measurement campaign in hilly scenarios,the main contributions and novelties are as follows:
1.A comprehensive measurement campaign is conducted in hilly scenarios,which considers different flight trajectories,including three vertical flights at different horizontal distances and three horizontal flights at different vertical heights.Moreover,the measurements of circular and straight lines along the hill at a constant height of 50 meters were conducted.
2.Based on the measurement data,the key channel characteristics of large-scale and small-scale channels under different flight trajectories are analyzed and compared,including the PL,SF,number of multipath components (MPCs),power delay profile(PDP),RMS DS,and RicianK-factor.
3.The flexible movements of UAV bring the nonstationarity in time domain.The temporal autocorrelation functions (ACFs) of different flying trajectories are provided at different time instants,and the coherence time in different cases is obtained from the ACFs.
The remainder of this paper is organized as follows.In Section II,the UAV AG channel measurement campaign in hilly scenarios is introduced,including the measurement setup,scenario description,and data processing.Then,some key UAV AG channel characteristics are introduced in Section III.Section IV presents the detailed results analysis of UAV channel measurement in hilly scenarios.Conclusions are drawn in Section V.
II.AG CHANNEL MEASUREMENTS
In this section,the introduction of UAV AG channel measurement campaign is provided,including the measurement equipment,referred scenario,and the measurement specifications.Furthermore,the processing of raw data and the acquisition of channel impulse responses(CIRs)are also briefly described.
2.1 Measurement Scenario and Specifications
The measurement campaigns were conducted in the hilly scenarios in Xinglongshan Campus,Shandong University,Jinan city.The campus is surrounded by hills.A relatively safe and representative area was chosen for our measurements.The satellite view of the measurement scenarios,actual measurement scenarios,as well as the detailed setup of the measurements are drawn in Figure 1.Then,the measurement specifications are listed as below.Firstly,vertical flights were performed at positions d1,d2,and d3 with horizontal distances of 20 m,40 m,and 60 m from Rx.The flying height of 50 m and the velocity of 5 m/s were set as the flying parameters,respectively.Secondly,horizontal flights were implemented at positions h1,h2,and h3,which were placed on the same vertical line.The flying distance is 50 m and the UAV speed is 5 m/s.Finally,the UAV flew in a circular and straight lines around the side of the hill with the fixed height of 50 m and the velocity of 10 m/s.The details of measurements are given in Table 1.
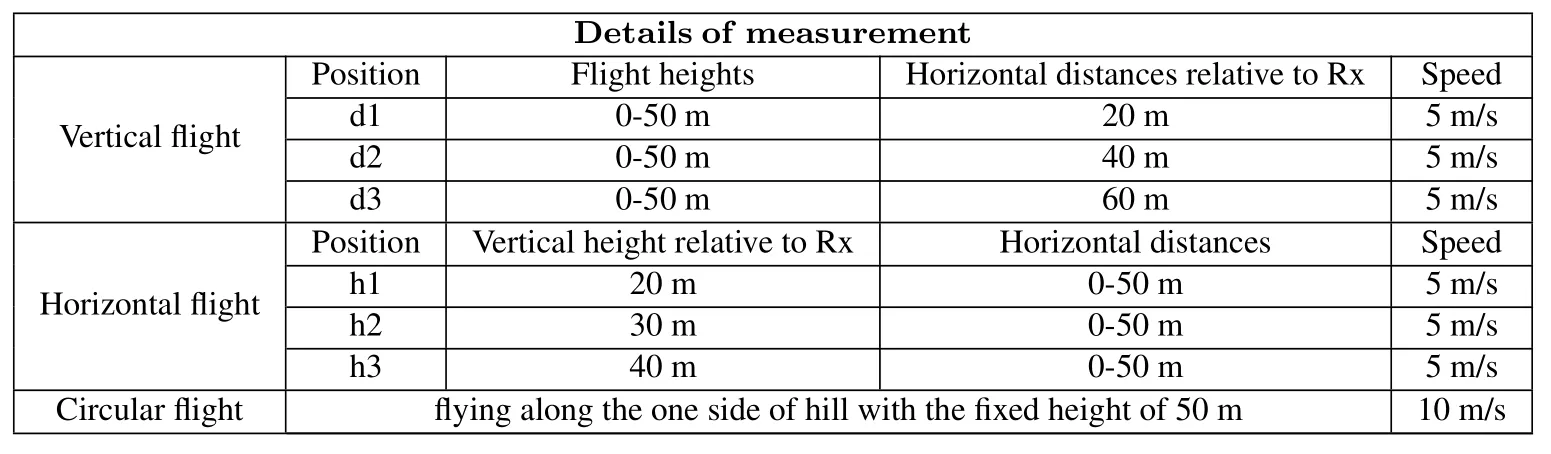
Table 1.The parameter settings of measurements.
2.2 Measurement Setup
The measurement system consists of two parts,i.e.,the UAV transmitter and the UAV ground receiver.The UAV transmitter is composed of the UAV,Universal Software-defined Radio Peripherals(USRP)X310,microcomputer,mobile power supply,discone-type antenna,and global positioning system(GPS)etc.DJI M600 pro drone with a maximum load of 6.0 kg is used in this measurement,connected to the microcomputer,USRP X310 is employed to send signals with specific carrier frequency and sampling rate in real time.Microcomputer is used to control USRP to send high-order pseudo noise (PN) sequence.The mobile power supply can provide power to the computer and USRP.A discone-type antenna with omnidirectional radiation in the frequency range of 1.0-18.0 GHz is selected,which is deployed below the UAV propellers.The altitude and distance information of UAV flight trajectory is provided by GPS.Moreover,the UAV ground receiver consisting of USRP X300,computer,outdoor power supply and the same antenna as the transmitter is introduced.USRP X300 is used to receive signals,the computer is used to store the received signals in real time,and the outdoor power supply provides power to USRP and computer.Figure 2 depicts the detailed integration of the UAV transmitter and ground receiver.
2.3 Measurement Data Processing
During the flight of UAV,the PN sequence is sent by USRP in real time,setting the sampling rate to 25 MHz and the bandwidth to 20 MHz.Meanwhile,the data were received and saved by Rx in real time.Finally,the measurement data are processed and analyzed.In order to obtain the characteristics of the propagation channel more accurately,before data processing,the response of the equipments,antennas at Tx and Rx sides and cables through back-to-back calibration [33]is eliminated.The transmit signal was denoted bys(t),the responses of system,antenna and cable were described asm(t),and the CIRs were abstracted ash(t).The back-to-back calibration signal is
where∗is the convolution operation.In the timedomain,the received wireless signal is expressed as
The frequency-domain response can be obtained by fourier transform of the time-domain response.The calibrated CIRs can be obtained from the inverse fourier transform of the frequency-domain[34],which can be expressed as
whereYth(f)andYrx(f)are the frequency-domain response of the calibration signal and the received signal,respectively.Based on the obtained CIRs,some channel characteristics can be derived and analyzed.
III.AG CHANNEL CHARACTERISTICS
In this section,typical channel characteristics of AG channels are presented including the PDP,PL,SF,RicianK-factor,RMS DS,and temporal ACF.Realistic and reliable large-scale fading channel models,i.e.,PL and SF models,are indispensable for efficient and trustworthy network deployment and optimisation.Moreover,investigating the statistical properties of UAV channels in hilly scenarios were essential for understanding and analysing the UAV communications systems.
3.1 PDP
Based on each calibrated CIR,the measured PDPs can be acquired.It is used to describe the power variations along the delay axis.The detailed expression can be presented as
whereh(τ) indicates the CIRs which are extracted from the measurement data,andτlrepresents the time delay of thelth path,Lis the total number of MPCs.
3.2 PL and SF
The PL estimation is essential for budget computation of wireless link and network planning.According to the acquired CIRs,the measured PDPs can be calculated.Peak search algorithm(PSA)is used to extract MPCs in delay domain from the measured PDPs,and the received power is the summation of the power of
each MPC[35].
whereLis the number of MPCs andPlis the receive power oflth path.
Channel attenuation is one of the most important channel characteristics considered in the design of communication systems.The related calculation can be defined as
wherePtdenotes transmitted power,Gr(30 dB) andGt(30 dB) are the gain of USRP at the Tx and the Rx,respectively.Noted that the gain of the equipments,antennas at Tx and Rx sides,and the cable have been eliminated through back-to-back calibration.In addition,USRP does not have the exact transmited power,soPtis calculated by back-to-back calibration,Pt1=−6 dB andPt2=−10 dB for 2.585 GHz and 3.5 GHz,respectively.
For the PL of AG channel,the modified close-in free PL model was proposed in[21].The expression of PL is presented as
wherePL(d)is the propagation attenuation after eliminating the influence of the equipment,antenna,and cable,drepresents the link distance of the UAV.cdenotes the intercept,which is a relative values.nrepresents the PLEs.Xdenotes the SF values,which generally follows the zero mean Gaussian random variable with standard deviationσX.The SF value can be calculated by simple minus using Eq.(7).
3.3 Rician K-Factor
The RicianK-factor is a very important parameter in link budget and channel modelling,which can characterize multipath effects from the power perspective.It is defined as the ratio of the power of LOS and the sum power of None-LOS(NLOS)[36].The calculation of RicianK-factor can be expressed as
wherePLOSdenotes the power value of the LOS path andPidenotes the power value of theith path.
3.4 RMS DS
RMS DS is one of the typical channel characteristics which is used to describe the delay characteristics of multipath effect.It can be obtained by calculating the square root of the second central moment of PDP,which can be denoted by
wherePlis the power of thelth path in linear,τlis the delay of thelth path.Note that the measured delay is the relative delay rather than the absolute values.
3.5 Temporal ACF
The temporal ACF can be defined as the correlation of received signal at different time instants among time interval ∆t.The temporal ACF of two arbitrary CIRsh(t)andh(t+∆t)is illustrated as
where(·)∗andE[·]denote the conjugate operation and the statistical expectation operator,respectively.
By analyzing the trend of the ACF at different moments,the non-stationary characteristics of the channel are then studied.
IV.RESULTS AND ANALYSIS
In this section,measurement results and analysis are given.First,the typical channel characteristics of UAVs flying horizontally and vertically in hilly scenarios are analyzed and compared,including the PDP,PL,SF,RicianK-factor,RMS DS,and temporal ACF.Then,the typical characteristics of circular and straight flights are compared and discussed.The measurements carried out for horizontal,vertical,circular,and straight flights are provided and compared as below.
4.1 Vertical and Horizontal Flights
The measurements for horizontal and vertical flights are performed at a center frequency of 2.585 GHz with bandwidth 20 MHz.Based on the related measured data,some channel characteristics are investigated,including the PDP,PL,SF,RicianK-factor,RMS DS,and temporal ACF.
4.1.1 PDP
The MPCs can be extracted using the PSA[35]in delay domain from the measured PDPs.Moreover,the number of peaks whose amplitude is within the highest peak and higher than the noise floor among the PDP are selected accordingly.Figure 3 gives an example of the PDP sample and PSA results at the horizontal distance of 40 m at vertical flight,the peak values are the received power of the MPCs,and the corresponding time point is considered as the time delay.It should be noted that the acquired delays of measured multipath are relative delays in this measurement because the Tx and Rx are not synchronized.The first arrived path is seen as the LOS path,which has the minimum delay.Here,the delay of LOS path is 0.48 us obtained by cyclically shifting the CIR.Based on the LOS delay,the corresponding NLOS delays can be further obtained.
4.1.2 PL and SF
Based on the measured data,the PL and SF are modeled for UAV flying vertically at different horizontal distances and horizontally at different vertical heights in hilly scenarios.Figure 4 illustrates the PL fitting results of vertical flights and horizontal flights respectively,anddrepresents the flight link length.From Figure 4 (a),we can see that the PL becomes more severe with the horizontal distance increases for the vertical flight.From Figure 4 (b),the attenuation of channel increases with the horizontal distance,and the PL at different heights is very close for the horizontal flight.In addition,the PLEsnand interceptcare obtained by using the least square method.The related parameters are shown in Table 2.We observed some unique channel characteristics in hilly scenarios.
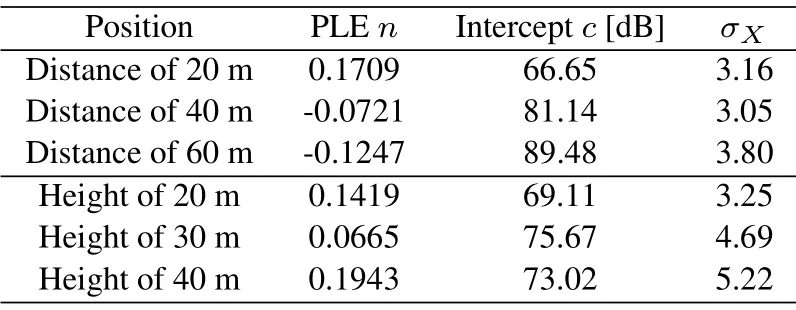
Table 2.PLEs and intercept c for three vertical flights and horizontal flights.
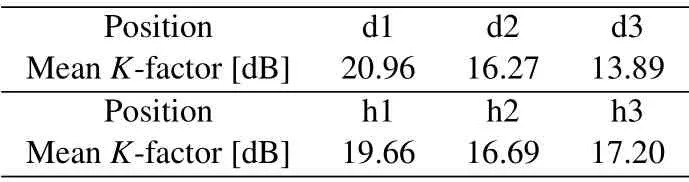
Table 3.Parameters of K-factors for vertical flights.
For vertical flight at different horizontal positions,the PL decreases with increasing height in a general suburban environment [21].However,as shown in Table 2,the PLEs at 40 m and 60 m are negatively correlated with height.We speculate that the scatterers are more concentrated in hilly scenarios,and more scatterers enter the Fresnel zone at longer distances,causing an increase in the NLOS path,resulting in a larger PL,and as the height increases,the channel gradually becomes closer to the LOS path,the communication environment becomes open and the attenuation decreases.For horizontal flight at different vertical heights,in general,the slope of PL with relative to horizontal distance becomes lower at a higher altitudes.However,as seen in Table 2,the slope is smallest at the height of 30 m,which may be caused by the hilly environment where the scatterers are concentrated at the height of 30 m.This results can provide a reference for the height deployment of UAV Communications in hilly scenarios.
The CDFs of SF values can be calculated for the vertical flights and horizontal flights as shown in Figure 5 (a) and Figure 5 (b) respectively,and the standard deviation is shown in Table 2.The SF values of cellular radio channels are 6-8 dB[37],the measured SF values in hilly scenarios are smaller than the typical values for the cellular radio channels.Meanwhile,the vertical flights results of measurement are included in the range (2.2-3.9 dB) of the measurement results in a hilly environment in[13].In addition,the CDFs of SF for horizontal flights at different vertical altitudes are very close.The results show that AG channels are more straightforward than that in cellular communication,although in hilly scenarios where scatterers are abundant.
4.1.3 RicianK-Factor
In the hilly scenarios with abundant and fixed scatterers,it is essential to study multipath effect through measurement results.RicianK-factor characterizes multipath effect from the perspective of power.The results of RicianK-factor at different flight trajectories are compared.Figure 6 (a) and Figure 6 (b) illustrate the CDFs of theK-factors for the vertical and horizontal flights respectively,and the fitting results are found to fit the normal distribution.Meanwhile,the mean ofK-factors are presented in Table 3.The measurement results show that the multipath propagation is more obvious at a horizontal distance of 60 m,and the LOS will increase in power as Tx and Rx get closer.TheK-factors of horizontal flights at different helights are very close.We can conclude that the scatterers in the hilly scenarios can creat rich MPCs in the low altitude and long distance flights.
4.1.4 RMS DS
The RMS DS represents the multipath effect from the perspective of time delay.In this section,the time delay characteristics of UAV AG channel at different flight trajectories are studied,the RMS DS of UAV vertical flights at the three different horizontal distances and horizontal flights at the three different heights are calculated according to Eq.(9).The results of RMS DS for the three vertical flights are shown in Figure 7 (a),and the average values of RMS DS are 0.0179 us,0.0335 us,and 0.0895 us respectively.The hills cause more scatterers to affect the channel at larger horizontal distances between the UAV and Rx,which is responsible for the largest RMS DS values at 60 m.In addition,we can see that the RMS DS at larger horizontal distances is more sensitive to height as the height increases.Meanwhile,the CDFs of three vertical flights at different horizontal distances are shown in Figure 7 (b),and the fitting results are found to fit the normal distribution.
The RMS DS results for three horizontal flights are illustrated in Figure 8 (a).From the figure,it can be observed that there is an approximate trend of time delay expansion for horizontal flight at different heights.Meanwhile,the delay values have significant peaks at 8 m and 35 m,which is likely to cause by the density of trees in hilly environment.Compared with other locations,there are dense trees at about 8 m and 35 m.Furthermore,the scattering effect of dense trees on the signal leads to greater delay of channel.The average value of delay spread are calculated as 0.0216 us,0.0390 us,and 0.0297 us respectively.The delay spread is the largest at the height of 30 m.We speculate that it is because the height of the hill is about 30 m,flying horizontally at the height of 30 m,and more scatterers affect the propagation channel.The CDFs of three vertical flights at different horizontal distances are shown in Figure 8 (b),and the fitting results are found to fit the normal distribution.Meanwhile,The relationship between the RMS DS with vertical height and horizontal distance is fitted by a linear function,denoted as
whered1,d2,andd3 represents the horizontal positions for vertical flights,hdenotes the flight heights.Meanwhile,h1,h2,andh3 represents the vertical heights for horizontal flights,dis the horizontal distance.It can be seen that RMS DS and vertical height are negatively correlated,and the sensitivity of RMS DS to vertical height is higher when the horizontal distance is larger.
4.1.5 Temporal ACF
The absolute values of local temporal ACFs of vertical flights at the distance of 40 m and horizontal flights at height of 30 m,are calcuated.Figure 9 provides the comparison of the temporal ACFs for the vertical flight and horizontal flight at time t=0 s and t=1 s respectively.We can see that there is a relatively small difference between two ACFs at different time instants when employing vertical flight.Therefore,we can conclude that the least non-stationarity appears when the UAV vertical flights.And there is a great difference between two ACFs at different times when considering horizontal flight.The ACFs also have different variation trends in vertical flight and horizontal flight at the same time.
4.2 Circular Flights and Straight Flights
UAVs flying along different trajectories in hilly scenarios may have different effects on signal transmission.UAV channel measurements for circular flight around the hill and straight flight in front of the hill are carried out at the center frequency of 3.5 GHz.Meanwhile,the flying height of the UAV is set as about 50 m,and the speed of UAV is 10 m/s.The flight trajectories are illustrated as in Figure 1.
4.2.1 PL and SF
The CDFs of PL for straight flight and circular flight are shown in Figure 10 (a),and some specific values of PL with the cumulative probability of 20%and 80% are marked out.Due to the more scatterers experienced by the circular flight,the attenuation value of circular flight is larger than that of straight flight.Moreover,we calculated theσXfor SF,which are 3.4247 dB and 2.3868 dB,respectively,and the CDFs of SF can be obtained as shown in Figure 10(b),which are found to fit the normal distribution.
4.2.2 RicianK-Factors and RMS DS
The CDFs of RicianK-factors and RMS DS for two different trajectories are presented as Figure 11.The specific values of RicianKfor straight flight and circular flight are given in Figure 11(a).From this figure,we can observe that the LOS component of straight flight is stronger than that of circular flight in hill scenarios.In the case of straight flight,it has relatively open environment and shows less obstruction between Tx and Rx.In the case of circular flight,it has stronger multipath effect due to the influences of trees on the hill and scatterers of hill itself.In addition,the CDFs of RMS DS and the relevant values of straight flight and circular flight are marked out in the Figure 11(b).When the cumulative probability is equal to 0.8,the RMD DS of the circular flight and straight flight are 0.105 us and 0.033 us,respectively.From this figure,we can observe that the RMS DS of straight flight is lower than that of circular flight.That is because the channel of straight flight is more LOS-like and has less MPCs compared with the circular case,which is in keeping with the trends of RicianK-factors characteristics.
4.2.3 Temporal ACF
The comparison of the temporal ACFs for two different trajectories flights at time t=0 s and t=1 s are provided in Figure 12.From this figure,we can see that the values of temporal ACFs vary with time t,which directly reflect the non-stationarity in time domain of UAV AG channel in hilly scenarios.Moreover,the values of temporal ACFs vary with time t for both two trajectories,and even at same time t,the temporal ACFs present different variation trends.Different flight trajectories will have certain effects on the values of ACFs.
V.CONCLUSION
In this paper,channel measurements of various flight trajectories and measured frequencies in hilly scenarios were performed.Different UAV flight trajectories mainly include horizontal flights,vertical flights,circular flights,and straight flights.Using the measured data,some key channel characteristics,such as PL,SF,RicianK-factor,RMS DS,and temporal ACF of UAV AG channel,were analyzed and compared.For vertical flights,the PL is negatively correlated with flying heights at 40 m and 60 m,and RMS DS is more sensitive to flying heights at larger horizontal distances.For horizontal flights,LOS propagation at higher altitude is more obvious in hilly scenarios,and the trends of PL andK-factors are very close at different vertical heights.It concludes that the scatterers in hilly scenarios bring rich MPCs in low altitude and long distance flights.For circular and straight flights,different from straight flights,the PL values of circular flights show a larger attenuation in the locations with abundant scatterers,such as 50 m of the flying distance.Meanwhile,the multipath effect reflected by theK-factor and RMS DS is more obvious because the circular flight is affected by the increase of scatterers.Finally,the timevariant ACFs of different trajectories are presented and compared,which verify the non-stationarity of UAV channel under different trajectory flights.
ACKNOWLEDGEMENT
This work was supported by the National Key R&D Program of China under Grant 2021YFB1407001,the National Natural Science Foundation of China(NSFC) under Grants 62001269 and 61960206006,the Fundamental Research Funds of Shandong University under Grant 2020GN032,the Future Plan Program for Young Scholars of Shandong University,the State Key Laboratory of Rail Traffic Control and Safety (Contract No.RCS2022K009),Beijing Jiaotong University,the Taishan Scholar Program of Shandong Province,the Key Technologies R&D Program of Jiangsu(Prospective and Key Technologies for Industry)under Grants BE2022067,BE2022067-1,and BE2022067-3,the High Level Innovation and Entrepreneurial Talent Introduction Program in Jiangsu,and the EU H2020 RISE TESTBED2 project under Grant 872172.
- China Communications的其它文章
- Environment Information-Based Channel Prediction Method Assisted by Graph Neural Network
- Multi-Scenario Millimeter Wave Wireless Channel Measurements and Sparsity Analysis
- Long-Range VNA-Based Channel Sounder: Design and Measurement Validation at MmWave and Sub-THz Frequency Bands
- A Novel Millimeter-Wave Channel Measurement Platform for 6G Intelligent Railway Scenarios
- A Geometry-Based Stochastic Scattering Channel Model for V2V Communications in Dense Urban Street Environments
- UWB Channel Modeling and Simulation with Continuous Frequency Response