
一种基于交通态势算法的交通预警系统设计
2022-11-17 08:04刘大伟陈建雄
上海船舶运输科学研究所学报 2022年5期
刘大伟, 陈建雄
(1.中远海运科技股份有限公司,上海 200135;2.上海船舶运输科学研究所有限公司,上海 200135)
0 引 言
近年来,随着我国机动车数量不断增多,高速公路拥堵问题越来越严重,由此引发的时间延误和环境污染等问题给社会造成了巨大的经济损失。根据2021年12月国务院印发的《“十四五”现代综合交通运输体系发展规划》[1],在智慧公路方面,应稳步推进集监测、调度、管控、应急和服务等功能于一体的智慧路网云控平台建设,提取、识别和分析高速公路的交通状态是管控的前提。国内外学者对此开展了一系列研究。LINDLEY[2]利用路段饱和度对交通拥堵情况进行了评估,将采集到的高峰时段车流量扩充为24 h的日车流量,并与最大通行能力相对比,确定当路段饱和度大于0.77时,路段处于交通拥堵状态。刘严磊[3]提出了改进的California算法,通过计算相邻线圈的占有率,并与标定的阈值相对比,判别路段是否存在交通事件。谭娟等[4]利用多元基础数据构建综合的交通流特征向量,将其作为数据支撑(包含交通流量参数、环境状态和时段等数据),提出了一种基于自编码(Auto-Encoder)的深度学习模型,并结合Softmax回归对交通拥堵状态进行了预测。张诚[5]对McMaster算法进行了改进,通过对大量历史数据进行分析,得到流量与占有率的二维数据关系图,该关系图由4个区域组成,每个区域代表1个特别的交通状态。采用这些研究方法计算得到的交通状况评价指标实时性较差,精确度较低。对此,本文以高速公路收费站出入口流水表和ETC(Electronic Toll Collection)门架牌识数据等为研究对象,采用Van-Aerde模型对区域交通流进行描述,采用短时路况预测算法对区域内可能出现的交通拥堵问题进行预测,并将所得结果与高速公路上现有的情报板设备对接,设计一种基于交通态势算法的交通预警系统,合理准确地展示当前的交通状况,为高速公路拥堵治理和交通管理者疏导交通提供依据。
1 系统架构及功能分析
1.1 系统架构
该系统采用主流的微服务框架设计,在提高系统性能的同时,增强其拓展性。基于交通态势算法设计该系统的架构,主要分为数据来源层、数据库层、业务层、网络通信层和访问层,各层次根据不同的功能划分为不同的应用模块。图1为系统架构图。

图1 系统架构图
1.1.1 数据来源层
该层通过不同的方式采集多种数据,包括但不限于收费站出入口流水表和ETC门架牌识数据等,为系统提供数据流支撑。
1.1.2 数据库层
数据库采用MySQL和分布式OLAP(Online Analytical Processing)联机分析处理系统。MySQL具有体积小、速度快和开源等特性,在系统开发中得到了广泛应用。分布式OLAP数据库能进行线性扩展,且支持多副本,无单点故障,以保证系统具有高可用和高并发的特点。数据库能与Grafana和Prometheus等开源监控软件集成,为运维提供方便。
1.1.3 业务层
系统基于智能中台实现各功能模块的具体功能,是预警系统的核心部分。
1.1.4 网络通信层
将系统打包部署至租用的公有云环境中,并搭建nginx负载均衡集群,以保证系统具有良好的性能和高可用性。采用容分发网络(Content Delivery Network,CDN),能避开影响数据传输速度和鲁棒性的环节,使信息传输的速度更快,安全性更强。
1.1.5 访问层
可通过PC(Personal Computer)端访问系统,实时掌握当前的交通态势,交通管理者以此为依据进行交通疏导,同时将内容实时推送给高速公路可变情报板,为出行者的路径选择提供依据。
1.2 系统功能分析
该系统主要包含区域交通态势实时计算模块、异常拥堵预警模块和交通迁徙计算模块,见图2。

图2 系统功能模块图
将高速路网划分为数个网格区域,基于实时数据,利用交通流基本图模型,结合路段拥堵状态、平均车速和出入口排队长度等指标,实时监测道路交通状态的变化。采用短时路况预测算法,根据区域交通的变化和区域类型对该区域的交通态势进行预测,并发出有关异常拥堵的预警。通过采集各收费站流入和流出的车辆数据,结合特殊事件(如节假日等),统计各区域车辆的OD(Origin-Destination)状况,计算交通迁徙情况。
1.3 系统性能目标
交通态势实时计算算法的输出延时小于5 s;实时路况及异常拥堵预警准确率能达到80%;实时路况更新时间小于2 min。
2 系统应用模块设计
在传统的交通流理论中,并没有明确给出交通态势算法的定义和描述。近年来,随着交通信息化和智能交通的不断发展,逐渐出现了一些新的概念和交通流分析方法,但本质上并未脱离传统的交通流理论范畴[6]。在高速公路上,受天气、道路和事故等众多不确定因素的影响,交通流运行状态是不断发生变化的。交通态势就是在一定的道路交通条件下,路网中行驶的车辆表现出的状态和变化趋势。系统实时计算当前的交通状态,并预测未来的车辆平均行驶速度,由此对道路异常拥堵情况进行预警;同时,计算省内外的交通迁徙情况,准确了解车辆的流动趋势,全面掌握路网运行状况。
2.1 区域交通态势实时计算模块
交通流基本图模型通过刻画流量、速度和密度等3个交通要素之间的关系,表征交通流的状态和变化规律,并通过数据拟合得到三者之间的函数关系式[6]。本文采用最小二乘法和标准遗传算法进行参数标定。系统实时获取高速公路收费站出入口流水表和ETC门架牌识数据,利用Van-Aerde模型[7]对区域交通流进行描述,模型的表达式为
(1)
式(1)中:s为车头时距,km;v为平均速度,km/h;vf为自由流速度,km/h;c1为车头间距参数,km;c2为可变跟车参数,km2/h;c3为车头时距参数,h。
c1、c2、和c3的计算公式[6]为
(2)
(3)
(4)
式(2)~式(4)中:vm为临界(最高)速度,km/h;vf为自由流速度,km/h;ρc为阻塞密度,辆/km;qm为通行能力,辆/h。
ρ为车头间距的倒数,即
(5)
平均速度采用路段平均行程速度,是指道路上或路网中所有车辆的总行驶里程与总行程时间的比值,其中行程时间包括中间停车和排队时间。主要根据高速公路出口流水表进行计算,同时区分车型,并剔除坏值数据,主要流程如下:
1)选择相应区间和相应时间段(实时)的数据;
2)根据车辆出入口收费站的序号匹配每辆车的行驶路段长度si,并计算每辆车的行驶时间ti(ti为出站时间与入站时间的差值);
3)设置行驶时间ti的范围为0~24 h,将超出该范围的数据剔除;
5)根据
(6)
流量q可由速度和密度得出,即
q=ρv
(7)
通过采集宁夏高速公路车辆数据对模型参数进行设置,结果见表1。

表1 Van-Aerde模型参数
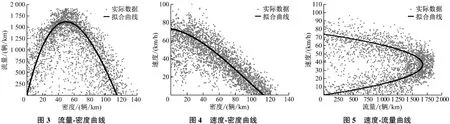
根据设置的参数可得到流量-密度曲线(见图3)、速度-密度曲线(见图4)和速度-流量曲线(见图5),清楚地显示交通流基本图模型3个要素之间的关系[8]。随着密度的不断增大,流量不断增大,会处于自由流状态,但当密度达到某个阈值之后,随着密度的继续增大,流量逐渐减小,交通逐步进入拥堵状态;随着密度的不断增大,车流速度逐渐减少;速度与流量的关系基本上与密度与流量的关系一致,也存在阈值。将交通流控制在阈值附近,以提高道路通行效率。
在得到区域整体的交通流特征之后,评估区域的交通运行状态,对交通流运行是否顺畅、是否产生拥堵进行分析。平均速度是最能表征车辆运行状态的指标:平均速度较高,说明交通流基本上处于自由流状态,未受天气和道路交通条件等不确定因素的影响;平均速度较低,说明交通流的运行受到了干扰,交通流基本上处于拥堵状态。根据不同的限速标准,结合平均速度将拥堵状况划分为5个等级,具体见表2。

表2 平均速度分级表
2.2 异常拥堵预警模块
根据实时交通信息计算交通态势的变化情况,及时对拥堵情况进行预警,并预测路网运行指数、拥堵长度和拥堵时间,需明确拥堵路段。
2.2.1 GCN-LSTM模型
为预测某路段未来的拥堵状况,首先需预测该路段未来的车速情况。车速预测采用基于图卷积网络(Graph Convolutional Network, GCN)和长短期记忆(Long Short-Term Memory, LSTM)单元的时间图进化网络(GCN-LSTM)模型完成,流程见图6。该模型同时考虑了交通数据的空间性和时间依赖性[9]。利用GCN提取每个窗口时刻目标路段实际速度的空间特征,并映射输出窗口时刻目标路段的隐藏空间关联特征[10]。速度在时间维度存在时间相关性,LSTM模型为提取时间序列特征常用的模型,将其作为提取时间特征的关键方法。GCN-LSTM模型整体框架见图7。
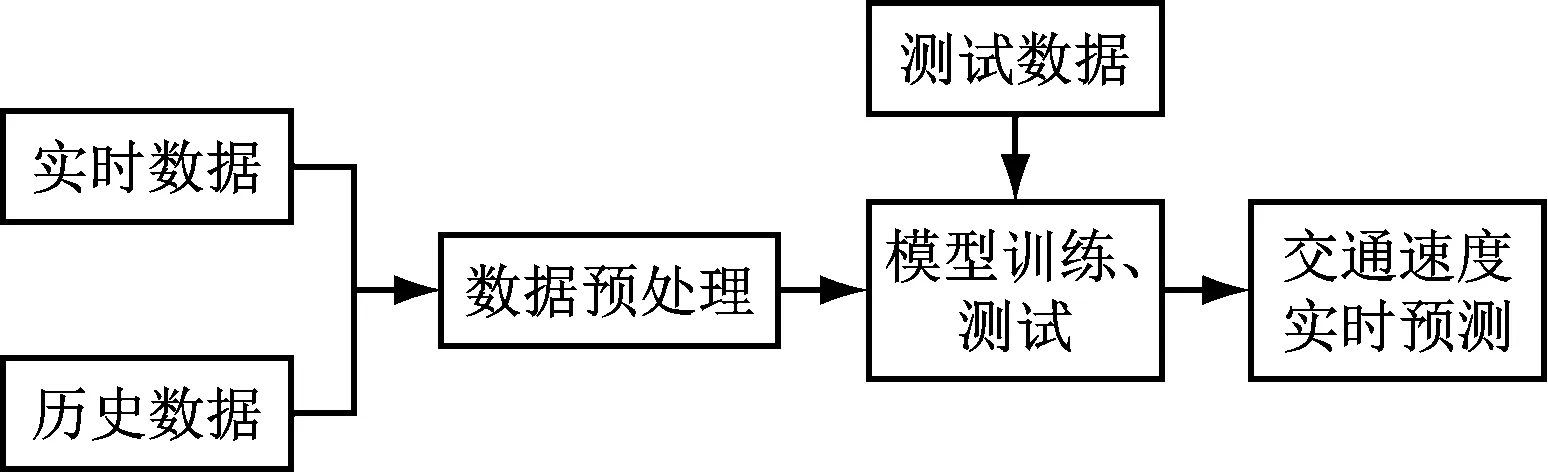
图6 基于GCN-LSTM模型的车速预测流程

图7 GCN-LSTM模型整体框架
2.2.2 模型参数设计
GCN-LSTM模型参数[10]主要包括批量大小、学习率、迭代次数、忘记偏置和LSTM单元数,通过不断地进行参数调试得到模型参数见表5,此时预测精度最高。

表5 GCN-LSTM模型参数
对于模型输入层,前80%的数据作为训练集对模型进行训练,剩余20%的数据作为测试集对模型进行评价。GCN-LSTM模型采用Adam优化器训练。
2.2.3 损失函数及评价指标

(8)
式(8)中:Lreg为L2正则项,防止过拟合;λ为超参数。
(9)
(10)
(11)
具体地:ERMS和EMA用于衡量预测误差,二者的值越小越好,二者的值越小,代表误差越小;R2越大越好,R2的值可以为1,即模型为不犯任何错误的完美模型,这在现实中往往是不存在的。
2.2.4 模型评价
基于宁夏高速公路运行数据集,对未来1 h内高速公路上的车辆通行速度进行预测,将ERMS、EMA和R2作为评价指标,分别对本文提出的GCN-LSTM模型与自回归综合移动平均(Autoregressive Integrated Moving Average,ARIMA)模型和支持向量机(Support Vector Machine,SVM)模型2种常用预测模型的预测结果进行对比,结果见表6。由表6可知:ARIMA模型基于历史数据,从时间维度描述交通流的变化规律,在交通流平缓时效果良好,但不适用于交通状况急剧变化的情形;SVM模型通过对历史数据进行训练得到输入与输出之间的关系之后,根据给出的未来交通数据进行交通预测;GCN-LSTM模型充分考虑空间相关性和时间相关性,在所有评价指标下都具有良好的性能,展示出了其在交通预测方面的优势。

表6 3种模型的预测结果对比
2.2.5 模型使用
采用GCN-LSTM模型对细分路段车辆的平均行驶速度进行预测;根据表2确定未来该路段的拥堵指数,同样分为5个等级;同时,对处于严重拥堵和中度拥堵状态的路段里程数求和,将其作为未来拥堵长度并计算拥堵时长。根据高速公路运行状态等级划分标准动态绘制路段颜色,通过接口将结果推送给动态情报板(见图8),实时展示交通状况,诱导司乘行为,提升高速公路通行效率。

图8 高速公路动态情报板
2.3 交通迁徙计算模块
通过采集各收费站流入、流出车辆的数量,结合特殊事件(如节假日等)统计各区域车辆的OD状况,计算交通迁徙情况。交通迁徙分为内部迁徙(省内)和外部迁徙。以宁夏为例:内部迁徙指宁夏5个地级市内部的交通迁徙;外部迁徙指外省市与宁夏之间的交通迁徙。通过统计各收费站的车流量,计算出宁夏5个地级市之间的迁徙情况和宁夏与外省之间的迁徙情况,见图9。

a)省内迁徙图
3 结 语
在高速公路管控方面,对实时交通态势进行研究具有重要意义,只有精确刻画当前的交通运行状况,才能准确诱导司乘行为,并提出合理的管控策略。本文设计了一种基于交通态势算法的交通预警系统,利用Van-Aerde模型准确描述区域交通流的变化特征,综合考虑交通预测的时空性,创新性地提出采用GCN-LSTM模型预测未来1 h内高速公路车辆通行速度。相比ARIMA模型和SVM模型,该模型的预测准确度明显提高,为高速公路的安全高效运行提供了重要保障。
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
建材发展导向(2019年11期)2019-08-24
测控技术(2018年5期)2018-12-09
测控技术(2018年2期)2018-12-09
西南交通大学学报(2016年3期)2016-06-15
中国交通信息化(2016年9期)2016-06-06
中国工程咨询(2016年1期)2016-02-14
小说月刊(2014年4期)2014-04-23
