新型智能消防灭火机器人设计及实现
2022-11-15 06:53:24袁文正潘强辉戴慎超陶卫军
南京理工大学学报 2022年5期
李 瑞,刘 琦,袁文正,潘强辉,戴慎超,陶卫军
(1.南阳中天防爆电气有限公司,河南 南阳 73000;2.南京理工大学 机械工程学院,江苏 南京 210094)
在火灾现场的消防灭火中,消防人员经常面临着生命危险与人身安全,消防灭火属于高危险性的特种行业[1,2]。在一些化工园区的火灾现场,由于存在危险气体或化学物品泄露或爆炸风险,给消防人员的身体健康与人身安全造成很大威胁[3]。
目前国内外开发的一些消防机器人产品主要以遥控方式为主,例如RXR-M40D-1型消防灭火机器人[4]、多功能消防灭火机器人[5]以及国外WALK-MAN人形消防机器人[6]等。在自主行走与导航避障技术方面,现有的同时定位与建图(Simultaneous localization and mapping,SLAM)技术与自主导航技术[7-9]成为主流,已有学者开发了基于激光雷达与惯性测量单元(Intertia measuring unit,IMU)的消防灭火机器人自主定位与导航系统[10,11]。在室外环境下的自主火源探测技术方面,主要采用基于可见光、红外光或者两者相结合的双光摄像头进行火源探测[12-14],但也容易受到一些红色或类似红色物体的反射光线影响导致误判。在室外火源定位技术方面,由于火源不具备反射光波特性且探测距离较远,常用的测距传感器与双目视觉都难以很好解决,目前尚无成熟实用的解决方案。
针对这一现状,本文开发了一款具有自主导航和自主火源探测与定位功能的智能消防灭火机器人。首先参考双履带驱动模式进行机器人本体结构设计,并对控制系统搭建与行走动力学建模;进一步结合实时动态(Real time kinematic,RTK)与SLAM技术,开发消防灭火机器人的自主导航与定位功能;在研发的自主火源探测与定向技术的基础上提出并实现机器人智能灭火方法。
1 机器人功能与工作原理
1.1 机器人功能要求与技术指标
与现有消防灭火机器人大多采用遥控方式不同,智能消防灭火机器人主要用于工业园区,在进行自动巡检的过程中能自主寻找与定向火源,并与消防人员协作进行智能灭火。针对其功能要求,确定机器人技术指标如表1所示。
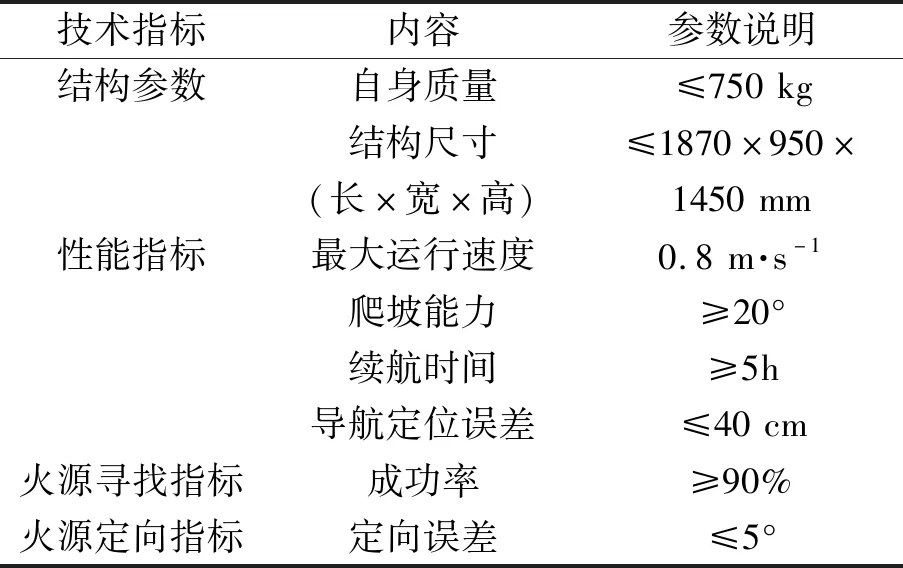
表1 机器人主要参数指标
1.2 机器人构成及其工作原理
考虑到消防现场地面的复杂性,智能消防灭火机器人采用双履带驱动机构,通过两侧履带上的驱动轮的速度控制来实现其差速转向功能。机器人构成主要包括机器人主体、履带行走机构、水炮和供水管道,及其所搭载的GPS高精度定位装置、火源探测传感器、摄像头和激光雷达,还有用于远程数据传输的数传模块、图传模块和无线WiFi。其构成如图1所示。

图1 智能消防灭火机器人构成
智能消防灭火机器人上搭载有高精度激光雷达与RTK定位系统,用于实现SLAM技术中的实时定位与避障功能。所采用的三光复合火源探测传感器安装在水炮炮管上方且始终与水炮炮管保持同一方向,用于火源探测与定向。此外,机器人上还搭载有无线Wifi,可用于遥控操作人员对机器人的远程控制。
在使用过程中,机器人按照规划路径在园区进行自主行走,并在指定点位停下来进行火源检测。一旦机器人发现火源则立即报警。遥控操作人员在接收到报警信号后,指示机器人达到设定的灭火点并由机器人自主确定火源及其方位后,由消防队员接上消防水管,通过控制水泵压力实施消防灭火。
2 机器人结构与控制系统搭建
2.1 机器人结构
所设计的智能消防灭火机器人结构如图2所示。采用双履带行走方式,搭载了摄像头、全球定位系统(Global positioning system,GPS)、激光雷达、火源探测传感器、水炮、喷淋装置和传输天线等传感器与设备,总体尺寸为1 870 mm(长)×950 mm(宽)×1 450 mm(高),总重约750 kg。驱动轮和导向轮的半径分别为150 mm和100 mm,每个承重轮都安装了独立弹簧悬挂来缓冲行走过程中的载荷波动。
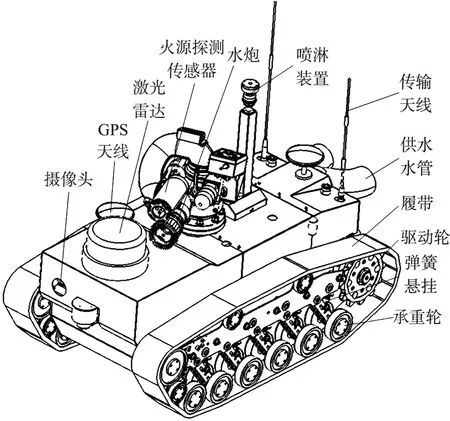
图2 智能消防灭火机器人结构
2.2 控制系统硬件构成
机器人控制系统一方面要实现对底盘和水炮的运动控制,另一方面要对自身状态与周围环境进行感知。其控制系统硬件框架如图3所示。
智能消防灭火机器人采用高性能嵌入式工控机作为主控制器,通过工控机的嵌入式PCIE板卡生成的两路PWM脉冲信号分别控制机器人左右两侧的驱动电机,同时通过CAN总线实现对水炮转台的控制。由GPS与前后两个蘑菇头天线组成RTK定位系统来确定机器人当前位置信息和航向信息。激光雷达用于自主导航与感知周围障碍物信息,火源探测传感器用于检测与识别火源,温湿度传感器用来检测机器人周围环境中的温度和湿度。所搭载的气体传感器则用来检测周围环境中是否存在危险性气体。单片机能读取气体传感器与温湿度传感器的检测信息和电池信息并反馈给工控机,由工控机通过无线数传模块传送给后方遥控操作人员。此外,火源探测传感器的图像信息和配备的摄像头获取的视频信息都通过无线图传模块传送到遥控箱上,为遥控操作人员提供现场情况。

图3 智能消防灭火机器人控制硬件构成
2.3 机器人行走过程力学分析
在机器人双履带驱动机构中,电机驱动力矩通过减速系统传送到驱动轮,并带动履带传动系统从而牵引机器人移动。其行走过程中的受力情况可采用经典力学方法进行分析,如图4所示。

图4 智能消防灭火机器人行走受力情况
设定机器人在行驶过程中路面的坡度角为θ,机器人质量为m,Fa和Ft分别表示机器人所受惯性力和履带牵引力,驱动轮转矩为Mk,采用经典力学方法对机器人行驶过程中的牵引力列平衡方程[15,16]为
Ft=Fr+G×sinθ+Fa+Fd
(1)
式中:Fr和Fd分别为行驶中的地面阻力和启动时的惯性阻力。设定机器人的加速度为a,则惯性力大小Fa=ma;惯性阻力Fd=λd·G,参数λd根据地面状况取值在0.01~0.05之间。
在地面阻力的计算中,对其进行简化处理:①地面不会因机器人的重量而下陷,②机器人在行进过程中的地面附着力远大于牵引力,不会因此发生打滑。由此可得地面阻力可表示为
Fr=μ×G×cosθ
(2)
式中:μ为机器人行进过程中地面变形阻力的系数。
此外,牵引力Ft又可表示为
Ft=(Mk-Mf)/R
(3)
式中:Mf为内部摩擦阻力矩,R为驱动轮半径。内部摩擦阻力矩Mf包括:
(1)电机到驱动轮轮轴的传动链阻力矩
Mf1=(1-η)×Mk
(4)
式中:η为电机到驱动轮轮轴的传动效率。
(2)驱动轮和履带的啮合摩擦阻力矩
(5)
式中:μ0为啮合摩擦系数,Zt为履带和驱动轮的啮合齿数。
(3)各轮轴轴径摩擦力矩,包括驱动轮、导向轮和承重轮的轴径摩擦力Mf3、Mf4和Mf5。假设轴径的摩擦力矩与所受压力成正比,轴承滚动摩擦系数为μ1,导向轮和承重轮半径分别为r1和r2,则各轮轴轴径摩擦力矩可以表示为
那么怎么提高?今天回顾改革开放40年开始的发展历程,从那么封闭,那么落后,那么陈旧的情况,怎么一步步改革过来的,今天我们戏里写的是一个造船厂,当然还有其他的很多厂,都是相同的。写这个不只是为了单纯地回顾这段历史,是要写出这段改革开放的精神对以后加大改革开放力度借鉴和参照的作用。希望这部戏在写工业革命改革成功经验的时候,能够发挥到这个作用就非常有意义。这个意义涉及到中华民族整个经济命脉的生存和发展的大问题,我们只是从一个小的方面入手而已。
(6)
(7)
Mf5=μ1×(G×cosβ-F1)×r2
(8)
综上所述,最终得到驱动轮转矩Mk可表示为
Mf2+Mf3+Mf4+Mf5]
(9)
由式(9),在确定地面与水平面的夹角、机器人质量与加速度以及其他参数后可求出机器人在行走过程中的驱动轮转矩Mk的值。
3 机器人自主导航与灭火技术
3.1 建图与导航定位
机器人自主导航与定位一般采用SLAM技术并结合激光雷达、深度视觉传感器以及其他定位传感器来实现。考虑到智能消防灭火机器人主要应用于范围较大的工业园区,从减少建图与自主导航时的累计误差出发,采用了基于RTK定位系统的高精度定位技术,实现在室外环境中的实时定位。在进行自主导航之前需要采用SLAM技术对工业园区进行建图。建图由GMapping功能包实现,此功能包基于粒子滤波算法来进行定位与建图。具体而言,手动控制机器人在园区道路上行走,实时获取RTK定位系统数据并计算得到机器人里程计信息,初步确定机器人的位姿。与此同时,实时获取激光雷达扫描得到的周围环境与障碍物的距离信息作为观测数据,把机器人里程计运动模型和激光雷达观测数据同时加入提议分布函数来计算粒子滤波器中粒子的权重,对机器人在地图中的位姿进行修正,并由此修正后的机器人位姿来构建局部地图并完成全局地图更新,最终完成整个工业园区的全局地图。建图功能的软件框架如图5所示。

图5 智能消防灭火机器人建图软件框架
机器人自主导航主要通过move_base功能包实现,其软件框架如图6所示。

图6 智能消防灭火机器人自主导航软件框架
3.2 火源探测与灭火方法

(10)

基于阈值分割法在灰度图上分割出疑似火源的目标区域,阈值分割法主要通过阈值的判断来决定每一个像素点是否在目标区域,用函数g(i,j)表示,其变换关系如下
(11)

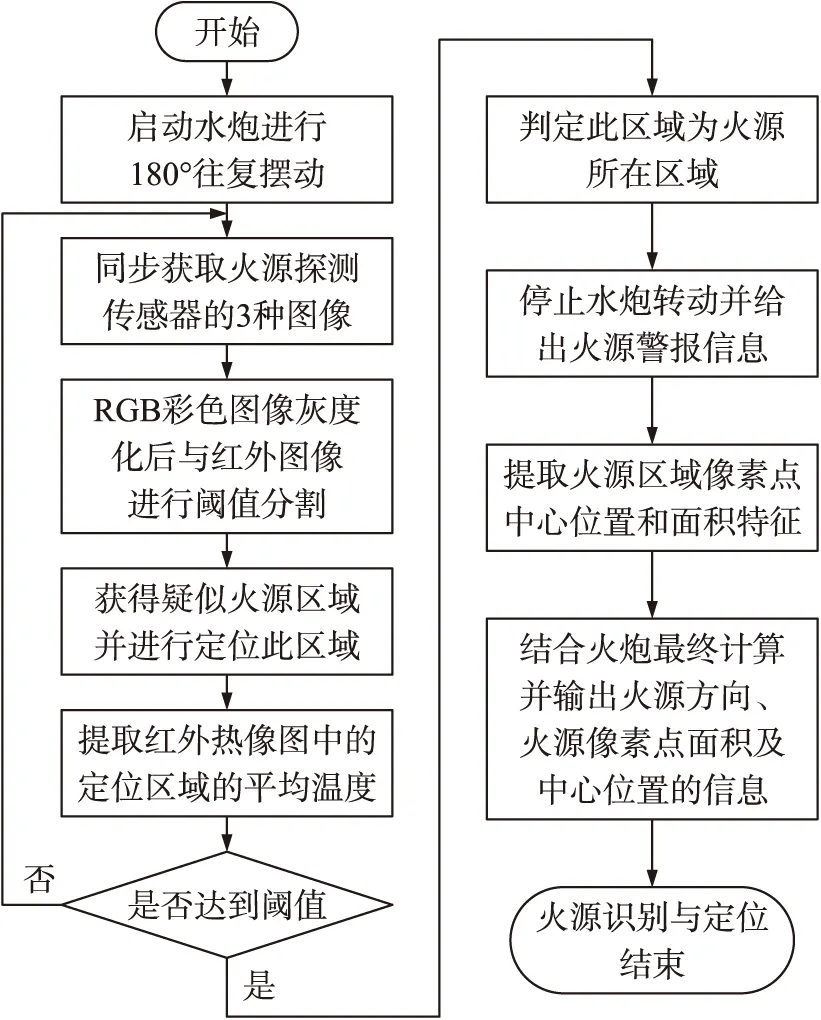
图7 火源识别流程图
在火源检测的过程中,控制水炮左右摇摆来带动摄像头的左右转动,使得三光复合火源探测传感器能够在机器人正前方180°范围内进行火源探测。一旦火源探测传感器检测到图像中存在火源后,发出声音报警并输出火源区域在图像中的像素点面积特征、中心位置与平均温度等信息。在接收到报警信息后,消防队员可把消防水管接入消防灭火机器人上的消防水管,通过控制水压和给出水炮在火源所在方位左右自摆的运动指令,从而实现人机交互下的半自动灭火。
4 试验与分析
4.1 机器人爬坡试验
从验证智能消防灭火机器人的爬坡性能出发,首先进行了机器人爬坡试验。在试验中,机器人从平地出发,以0.3 m/s的速度均速前进,爬上30°的斜坡后停止。在此过程中,检测机器人两个电机的总电流值,根据驱动电机的电流和电机输出转矩间的比例关系计算出其输出力矩,与仿真结果进行对比来验证机器人行走动力学模型。机器人试验现场照片与机器人爬坡过程中的力矩曲线分别如图8和图9所示。
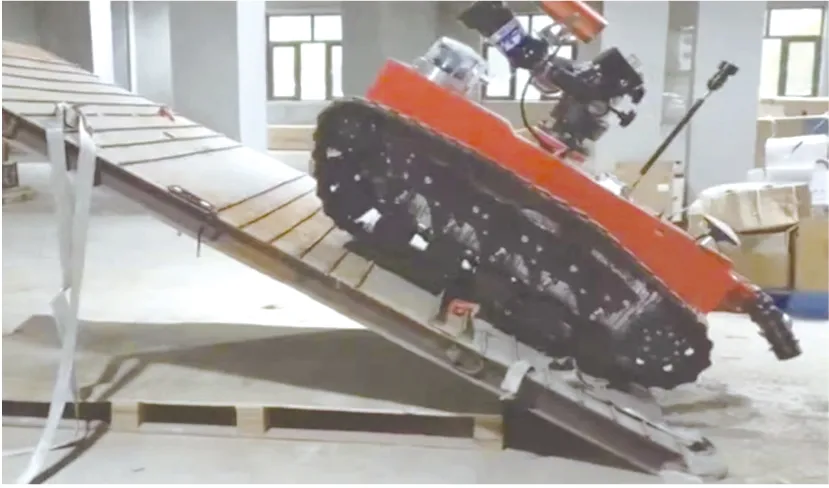
图8 机器人爬坡试验
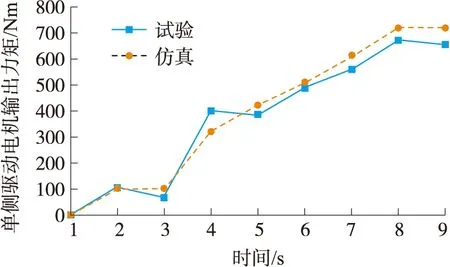
图9 爬坡力矩图
在图9中,同时给出了根据式(9)所计算得到的机器人爬坡过程中的驱动力矩仿真结果。由此可见,试验测得的实际驱动力矩略微小于其仿真结果,在整个爬坡过程中两者的最大值分别为716.4 Nm与675.6 Nm。考虑到试验中的一些误差与影响因素,这个小于5%的力矩误差验证了所建立的驱动力矩计算模型的正确性。由于单个驱动电机经过减速器额定输出力矩为573 Nm,双侧驱动的总额定输出力矩为1 146 Nm,大于爬坡过程中的输出力矩最大值,验证了机器人能满足爬上30°斜坡的驱动力矩要求。
4.2 园区巡检试验
在园区巡检试验中,首先利用SLAM技术建立园区静态地图,然后根据此静态地图进行机器人巡检试验,整个园区巡检范围约为125 m(长)×100 m(宽)。通过手动控制机器人在园区道路上行走并实时建立静态地图,如图10所示。在这静态地图上设置一系列点位,形成图中所示的规划路径,如图10中虚线所示。机器人从初始位置(0,0)出发,在园区道路上行走一圈后回到初始位置,实际行走路径如图10中实线所示。在机器人回归初始位置时记录下其在初始位置精度和航向误差。机器人在园区道路上行走的平均速度约为0.4~0.5 m/s,行走一圈所需时间约为16 min,试验场景如图11所示。从图10中可见,图中机器人的规划路径和实际行走路径基本重合,存在一定小偏差,重复试验10次,每次返回初始位置的实际坐标如表2和图12所示。

图10 所建立的园区静态地图与试验规划

图11 机器人巡检场景
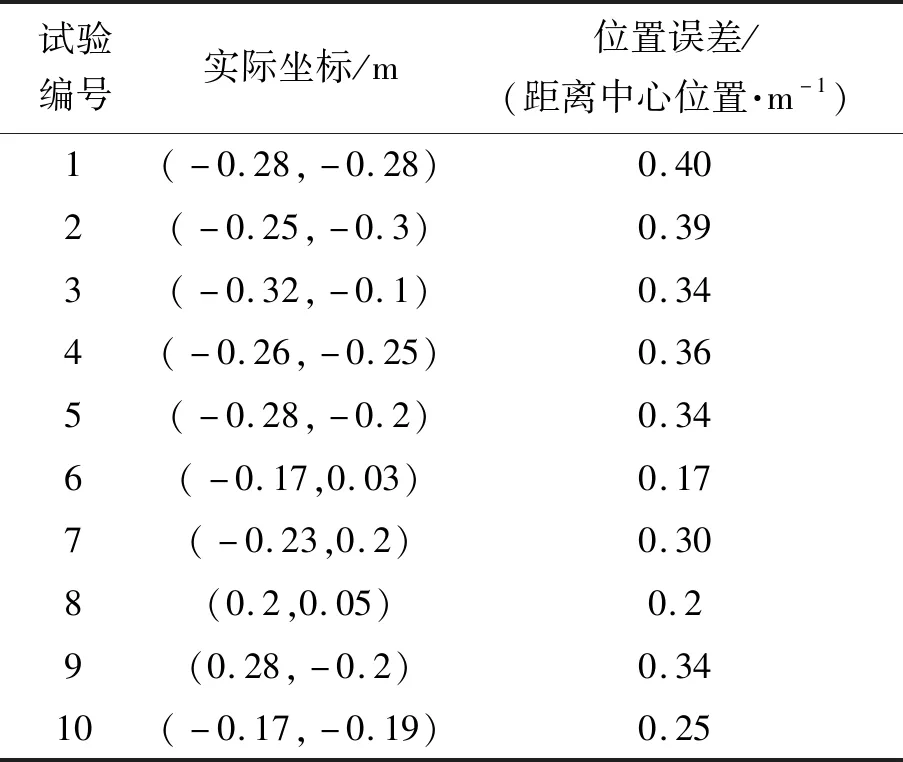
表2 巡检试验定位数据
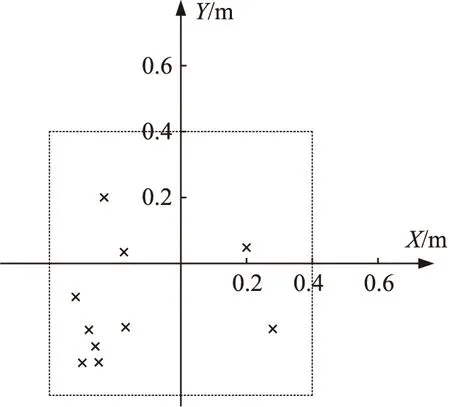
图12 巡检试验定位结果
从表2中可见,设定初始位置的坐标为(0,0),其返回初始位置的实际坐标实际上代表机器人在该点的定位误差。结合表2和图12可见,机器人10次测量中,其定位误差的最大值为0.4 m,满足定位误差在±0.4 m以内的指标要求。
4.3 园区火源探测与灭火试验
在火源探测试验中,在园区设定一处火源与灭火点,让机器人停止在初始位置并保持合适的水炮俯仰角不变,控制水泡水平左右对称180°来回转动,同时利用固定在水炮炮管上的火源探测传感器进行动态检测。在利用火源探测传感器检测到火源后自主行走到灭火点,在灭火点再次进行火源探测;在探测到火源后水炮炮管立即停止转动,并结合水炮的左右转动角度与火源中心点在图像中的左右位置坐标,来计算出火源相对于机器人的方位,即进行火源定向。重复上述试验10次,记录下机器人识别火源是否成功以及火源的定向误差。在这里,定向误差指的是火源定向得到的火源方位与其实际方位之间的角度误差。其影响因素主要包括水炮的转动惯性和火源信息处理过程中的时延等因素。在实际灭火过程中,通过在灭火时对火炮进行±8.0°左右的来回摆动保证其水炮灭火的方向准确性。所得到的火源探测试验数据如表3所示。
由表3可见,机器人在10次火源探测试验中都能成功探测到火源,火源识别成功率达到100%并能实现准确定向,10次定向误差都在技术指标要求的±5.0°以内。现场试验场景如图13所示。
在验证了机器人自主火源探测与定向功能的基础上,进一步给机器人接上水带进行灭火试验,其场景如图14所示。机器人在自主行走过程中自主探测与定位火源后,由消防人员给出合适的水压对火源进行灭火,同时机器人按照设定程序进行±5°的水炮左右自摆,完成了其灭火任务。
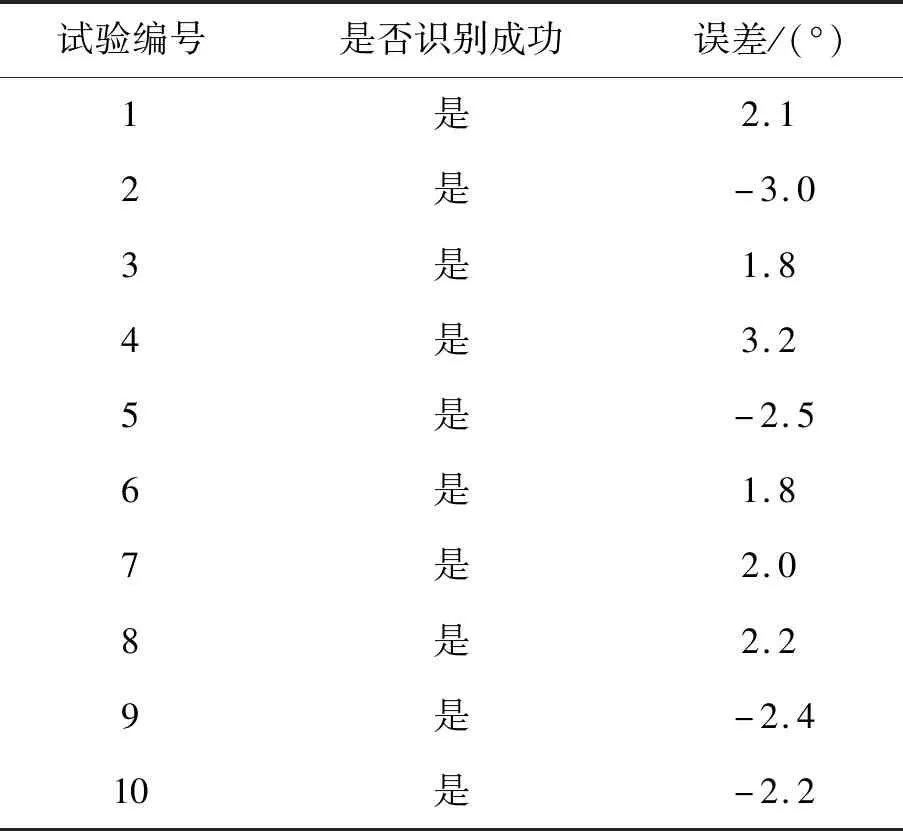
表3 火源探测试验数据

图13 机器人火源探测试验场景

图14 机器人智能灭火试验场景
5 结束语
从实现消防机器人在火灾现场的自主行走与自主灭火出发,本文提出并设计了一款新型智能消防灭火机器人。采用双履带驱动结构,设计并制作了智能消防灭火机器人本体,完成了其控制系统搭建与行走动力学建模。基于RTK技术获得机器人的实时位置与航向信息,并结合SLAM技术实现了机器人自动建图、自主导航与定位功能;采用最新的三光复合火源探测传感器,对3个摄像头得到的同步图像的综合处理与分析,同时从火源的可见光特征、红外光特征与温度特征3个方面进行综合判断,能达到高准确率的火源识别与定向,进一步提出并实现了智能消防灭火机器人的智能灭火方法。最后,通过仿真与试验对所建立的机器人行走动力学计算模型、自主导航、火源探测与定向技术的有效性进行了验证。试验结果表明,所开发的智能消防灭火机器人能够在园区进行自主巡检、火源探测与智能灭火,行走速度大于0.4 m/s、爬坡角度大于30°、定位误差小于0.4 m,火源识别率大于90%,具有良好的应用前景。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
水上消防(2021年5期)2022-01-18 05:33:26
工程建设与设计(2021年11期)2021-07-28 06:32:50
装备制造技术(2020年9期)2021-01-26 00:15:08
环球时报(2020-10-22)2020-10-22 04:14:46
中国新技术新产品(2020年4期)2020-05-05 15:49:48
森林防火(2019年1期)2019-09-25 06:41:16
中国军转民(2017年6期)2018-01-31 02:22:38
山东林业科技(2016年5期)2016-07-05 00:42:56