光纤传感在公路隧道智能调光系统中的应用
2022-11-15 04:46余灿李智坚
交通企业管理 2022年6期
□余灿李智坚
随着高速公路隧道里程的增加,隧道照明的费用也在逐渐增长。在隧道照明的费用支出中,有很大一部分是由于过度照明所致。过度照明不仅造成资源的浪费,同时也增加了企业的运营成本。公路隧道监控人员在无法实时掌握管辖各个隧道的天气情况、交通流量、隧道内光照数值等信息的情况下,仅凭自身的工作经验来控制灯具,增开照明数量或者增加照明时长,极易造成过度照明资源浪费。采用隧道智能调光系统,利用光强检测器、车辆检测器等探测装置组成智能调光系统,并通过光强控制系统自动调节隧道内照明数量,实现隧道内与隧道外光强照度平衡,既可以营造出良好的行车视觉效果,也能够减少过度照明造成的电力资源浪费。
目前常用的车辆检测器主要有感应线圈和视频检测器等,电类传感器具有较高的维护成本,在桥梁、隧道等特殊路段进行安装时难度较大;视频检测在隧道环境内,很容易受到光照、烟尘等干扰因素的影响。笔者利用分布式光纤测振技术,将振动探测光缆沿着隧道铺设,通过实时采集隧道沿线全域的振动信号,实现对公路隧道的实时车流量统计。该系统易于安装和维护,不受光照、烟尘等干扰因素影响,可以作为公路隧道智能调光系统的可靠参考依据。
一、控制原理
车流量的数据主要用于控制隧道内全日灯的开关。交通流量采用短时交通流预测理论,通过交通数据判断全日灯组的开关:若预测的交通量数据N>350 veh/(h·ln)时,判断路面道路情况为拥堵,这时增开1组基本照明,确保隧道的行车安全。而在夜间段,一般情况下开启1组基本照明;若预测交通量N≤350 350 veh/(h·ln)时,根据预设关闭1组基本照明,隧道内只留下应急照明设备,减少用电设备用电,达到按需照明的目的。调光控制逻辑如图1所示。
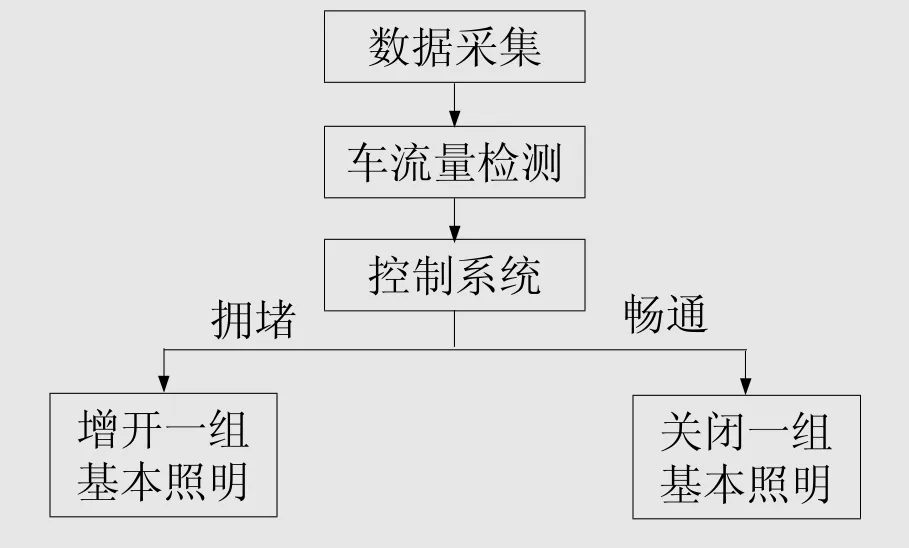
图1 调光控制逻辑
二、信号分析
将振动探测光缆敷设于隧道沿线路面的下方,实时采集隧道沿线路面的振动信号,从而获得振动信号时间-空间矩阵图像,用于公路隧道内的车行信号提取和分析。振动信号时间-空间矩阵图像横轴为探测点序列,纵轴为时间序列。每个像素点的亮度表征了对应点位振动信号幅值的大小。
1.干扰过滤
在公路隧道内,主要振动干扰源来自隧道内风机运行时产生的振动。通过实地观察,隧道内风机振动干扰具有位置固定、空间影响范围较小(一般不超过连续3个探测点)的特点。在振动信号时间-空间矩阵图像中,表现为多条与空间轴垂直的直线段;而车行信号在短时范围内,在振动信号时间-空间矩阵图像中,则表现为多条具有一定斜率的直线段。其中,一条直线段反映了一辆车的行驶轨迹。线段的斜率越大,则对应车辆的行驶速度越低,即在相同时长范围内,车辆行驶的距离越短。因此,车辆行驶信号形成的斜线段,其斜率是在一定范围内变动的。
在信号过滤算法设计时,需要通过对振动信号时间-空间矩阵图像中的直线段斜率进行判断,找到风机振动产生的垂直线段,并将对应区域的信号进行滤除。同时找到符合车辆行驶特征的斜线段,将对应区域的信号进行提取,以作下一步分析。
风机干扰信号的过滤算法,计算步骤如下:①将单模光纤作为传感光缆,敷设于隧道沿线路面的下方;②采集隧道内沿线的振动信号,得到光纤振动信号时间-空间矩阵图像;③使用OTSU算法得到分割阈值,对光纤振动信号时间-空间矩阵图像进行二值化处理;④使用霍夫变换进行直线检测,找到光纤振动信号时间-空间矩阵图像中,所有长度大于50的直线段;⑤找到斜率绝对值≥50°并且≤80°的直线段,认为属于车行信号区域,统计并记录其时间和空间涵盖区域。图2为一段60秒时长,620探测点(对应空间距离6 200米)的光纤振动信号时间-空间矩阵图像,在其中找到了多条符合斜率范围的斜线段,这些斜线段所涵盖的时间和空间范围,与车辆行驶信号所涵盖的时间和空间范围基本相符;⑥找到斜率绝对值≥89°的线段,认为属于风机干扰区域,统计其空间涵盖区域,在光纤振动信号时间-空间矩阵的二值化图像中,将此类垂直线段空间涵盖区域的像素值置0,即可以对隧道内风机振动干扰信号进行滤除,如图3所示。在图中找到了多条垂直线段,发现这些垂直线段所在的空间位置与开启风机的位置基本相符。

图2 车行信号判断
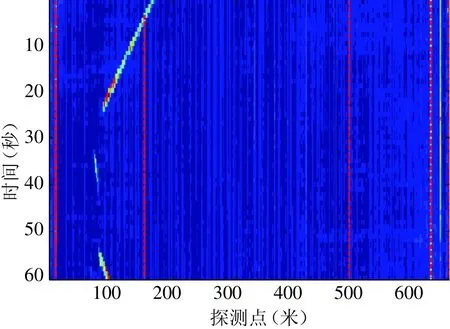
图3 风机干扰过滤
2.激励提取
由于车辆行驶信号产生的振动激励具有一定的时间宽度,因此在一次连续的车行信号中,会覆盖有多条斜率相近的直线段,如图2所示。这些斜线段的涵盖范围并不能十分准确地描述一次完整的连续车辆行驶信号。对连续车行信号的提取方法,其计算步骤如下:①使用一个1×4的模板,对光纤振动信号时间-空间矩阵二值化图像进行闭运算,即先膨胀后腐蚀,用于连接在连续车行信号中被风机干扰过滤隔断的部分;②使用连通域分割算法,从上步运算结果中,分割出多个连通域;③将每个独立的连通域,与上节得到的车行信号直线段的起止端进行比较。若某连通域同时覆盖了某条车行信号直线段的起止端,则认为这个连通域是一次连续的车行信号激励,并在系统中进行记录。图4为示例信号中的车行激励提取结果,可见提取到了2组车行激励,这两组车行信号的车辆行驶方向相反。
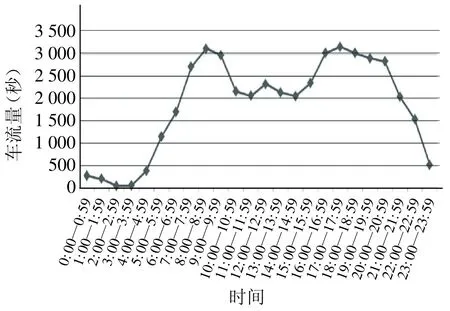
图4 车行激励提取结果
3.车流量检测
系统每间隔一段时间,对光纤振动信号时间-空间矩阵图像进行一次车行信号提取运算,通过对检测结果的累加和统计,即可得到此时段隧道内的车流量信息。图5为系统所监测隧道在某一天各个时段的车流量统计结果,与真实情况基本相符。
系统监测到在08:00—09:00时段及16:00—20:00时段,隧道内的车流量相对较大,因此在此时段内,发出增加开启1组基本照明的信息;而在23:00—次日05:00时段,系统监测到隧道车流量较小,发出关闭1组基本照明的信息。
三、应用效果
某高速交通隧道采用公路隧道智能调光系统,基于光纤传感系统对隧道内的车流量进行实时检测,用于控制和调整隧道内的照明系统。经过长期运行测试,能够很好地达到根据车流量情况调节隧道照明亮度的效果。
2022年1—3月,A线用电量累积38 474.562 5千瓦时,B线用电量52 276.812 5千瓦时,扣除非照明设备用电后B线用电量累积34 276.812 5千瓦时(90天,每日按200千瓦时计算)。节能率(%)=(A线隧道照明设备用电量-B线隧道照明设备用电量)/A线隧道照明设备用电量。由表1可见,累积节省电量为10.22%,系统在保证公路隧道有效照明的同时,节能应用效果显著。

表1 隧道智能调光系统能耗对比
四、结语
利用分布式光纤测振系统采集隧道沿线全域振动信号,实现对公路隧道实时车流量统计。系统能够对公路隧道内的车行信号进行有效提取和统计。基于光纤传感系统对隧道内的车流量进行实时检测,用于控制和调整隧道内的照明系统。经过长期运行测试,能够很好地达到根据车流量情况调节隧道照明亮度的效果,经过运行统计,隧道照明节省电量可达10.22%。系统在保证公路隧道有效照明的同时,有效减少了过度照明带来的电力能源浪费。
猜你喜欢
中国交通信息化(2020年5期)2021-01-14
中国交通信息化(2019年4期)2019-07-13
中国交通信息化(2018年9期)2018-11-09
中国自行车(2018年6期)2018-07-23
电子制作(2017年17期)2017-12-18
中国交通信息化(2017年9期)2017-06-06
中国三峡(2016年5期)2017-01-15
红土地(2016年6期)2017-01-15
数学教学通讯·初中版(2015年5期)2015-06-17
中国交通信息化(2014年6期)2014-06-05