一种机器学习海面风场快速融合的方法
2022-11-14 06:34:28张巍杜超凡郭安博宇宋晓姜沈世莹
海洋学报 2022年11期
张巍,杜超凡,郭安博宇,宋晓姜,沈世莹
( 1. 国家海洋环境预报中心,北京 100081;2. 中国海洋大学 计算机科学与技术学院,山东 青岛 266100)
1 引言
作为海洋学最重要的物理参数之一,海面风场是海洋上层运动的主要动力来源,几乎所有的海水运动都与之直接相关[1–7]。与此同时,海面风场对于海洋渔业、海上交通及工程活动、风能开发等都有着直接的影响[8–9]。对于海面风场的测量,其中常规的测量手段包括船舶、浮标以及沿岸站等。相对于全球海洋来说,常规测量手段获取到的风场数据资料非常缺乏,很难满足人类的生产或研究的需求。此时,卫星遥感技术的出现很好地解决了常规测量手段所存在的问题。卫星遥感技术有着覆盖范围广,空间分辨率高,能够实时或准实时获取数据的优势[10–11]。但是单一卫星提供的海面风场产品在覆盖率等方面存在着不可避免的缺陷,因此研究如何将多源卫星海面风场等产品进行融合,以此提高海面风场数据的覆盖范围和精度,从而满足当前数值预报研究以及海洋中小尺度系统研究的需求变得尤为重要。
当前有许多数据融合算法被研究者提出并利用。海面风场作为数据融合的应用领域,目前主要的融合方法有插值类融合算法和同化变分类融合算法。其中插值算法有Cressman 插值、Kriging 插值和时空加权分析方法等,同化变分算法包括最优插值法、三维变分法等[12]。凌征等[13]通过Cressman 插值融合了我国近海的卫星风场和沿岸气象站风场资料。Zhang 等[14–15]对包括SSM/I、TMI、QuikSCAT、AMSRE 等在内的多颗卫星海面风速数据进行了时空权重插值融合,产生了全球范围1987–2006 年的时间分辨率为12 h、每天、每月的0.25°网格的风速。齐亚琳和林明森[16]对海洋二号卫星海面风场和NCEP 数值风场资料进行融合,融合算法中同样采用时空权重插值。Yan 等[17]对多源散射计和辐射计风场与模式在分析风场进行了融合研究,利用最优插值法建立了时间分辨率为6 h,空间分辨率为0.25°的2000–2015年的全球风场产品。Chao 等[18]基于二维变分分析的方法融合了卫星散射计海面风场与区域中尺度大气模式风场。
综上所述,不论是插值类融合算法,还是同化变分类融合算法,它们都可以基本解决海面风场融合的问题。但是在实际应用中,受到当前计算能力的制约[19]。这些算法由于计算过程复杂,往往需要使用计算机集群,且较难实现实时化融合。
为了以较低的计算代价实现实时化海面风场融合,本文提出在多源卫星数据和ERA-5 再分析数据重叠区域,训练基于XGBoost 的机器学习ERA-5 数据修正模型。然后利用该模型在无卫星数据区域快速修正(机器学习推理)ERA-5 数据,使得修正后得到的融合风场数据更加贴近卫星观测值,最终得到时间分辨率为12 h、每天的0.25°的网格融合风场数据,实现无缝网格风场[20]。其中最核心的修正过程是利用已经训练好的模型进行快速推理,而由于机器学习推理的快速性,可以减小计算代价,构建整个海面融合风场。
2 海面风场相关数据集
本文使用的卫星有海洋二号B(HY-2B)卫星、中法海洋卫星(CFOSAT)以及欧洲气象卫星B(MetOp-B)卫星。3 颗卫星均可提供2020 年12 月以及2021 年1 月的海面风场资料。
HY-2B 卫星散射计L2B 级数据存储经过风场反演和模糊去除处理后得到轨道各个风元的中心位置、风速、风向、观测时间及其他相关数据。HY-2B卫星散射计每天约有16 轨数据,可覆盖全球90%的海域[21]。陈克海等[21]使用ECMWF 再分析风场数据、热带大气海洋观测计划(TAO)浮标和NDBC 浮标实测数据对HY-2B 风场进行了总体质量分析。分析发现,在4~24 m/s 风速区间内,HY-2B 卫星风速、风向均方根误差(RMSE)分别优于2 m/s 和20°,能较好满足HY-2B 卫星散射计业务化应用的精度要求。本文使用2020 年12 月以及2021 年1 月数据来进行实验,选取的HY-2B 卫星散射计L2B 级数据的时间跨度为12 h,空间分辨率为25 km×25 km,且空间分布在0°~45°N,100°E~180°。
中法海洋卫星采用成熟的CAST2000 小卫星平台,设计寿命为3 年,运行于轨道高度为521 km、降交点地方时07:00 的太阳同步轨道,探测数据分别传输至中法两国地面站,由两国地面应用系统接收并进行处理。该卫星在海洋动力环境业务监测、海洋灾害监测和预报预警、海洋科学研究中发挥重要作用。本文同样使用2020 年12 月以及2021 年1 月数据来进行实验,选取的CFOSAT 卫星L2B 级数据时间跨度为12 h,空间分辨率为12.5 km×12.5 km,且空间分布在0°~45°N,100°E~180°,其风速精度为1.5 m/s,风向精度为20°[22]。
2013 年4 月24 日,欧洲航天局和欧洲气象卫星开发组织联合发射的MetOp-B 代替MetOp-A 作为主要的业务观测卫星,其提供的海面风场数据产品风速精度为2 m/s,风速范围为0~50 m/s。本文选取的MetOp-B 风场数据空间分辨率为12.5 km×12.5 km,且空间分布在0°~45°N,100°E~180°。
ERA-5 是欧洲中期天气预报中心对过去40~70 年全球气候和天气的第5 代再分析数据。目前的数据是从1950 年开始的,分为1950–1978 年的气候数据存储条目和1979 年以后的。ERA-5 提供了大量大气、海浪和陆地表面数量的每小时估计数。本文选用的ERA-5 再分析风场时间区间为2020 年12 月以及2021 年1 月,其空间分辨率为0.25°×0.25°,其空间分布在0°~45°N,100°E~180°。
浮标数据选自离岸50 km 以上,具有连续风矢量观测能力的TAO 浮标数据。该浮标具有较高的观测频率,每10 min 观测一次风速、风向。由于选定的TAO 浮标上的测风计距离海面4 m,而散射计测量的是高度10 m 处的风速,因此需要将浮标观测风速转换到10 m 高度上的风速,转换公式为

式中,z表示距离海面的高度;s10和sz分别表示10 m高度处的风速和在z高度上的风速。
3 融合方法
对于融合风场的生成,研究共分为两部分进行,即修正融合风场模型的训练及其机器推理。文中首先以卫星数据作为实况数据,通过XGBoost 模型方法对ERA-5 数据进行修正训练,得到修正融合风场模型,使得修正后的ERA-5 数据更加接近于卫星数据分布,然后利用训练完毕的模型生成海面融合风场。
文中将混合的卫星数据统一处理成为0.25°×0.25°的标准网格数据。在插值处理过程中,由于卫星数据之间分辨率的不同,即12.5 km×12.5 km 和25 km×25 km不等,为了方便统一插值,本文在空间上采用反距离加权插值算法,时间上采用最近邻方法对混合卫星数据进行插值,插值完成后的卫星数据与ERA-5 数据共同完成修正融合风场模型的训练,并最终得到全区域的时间分辨率为12 h 的0.25°×0.25°的标准网格数据,具体融合流程如图1 所示。
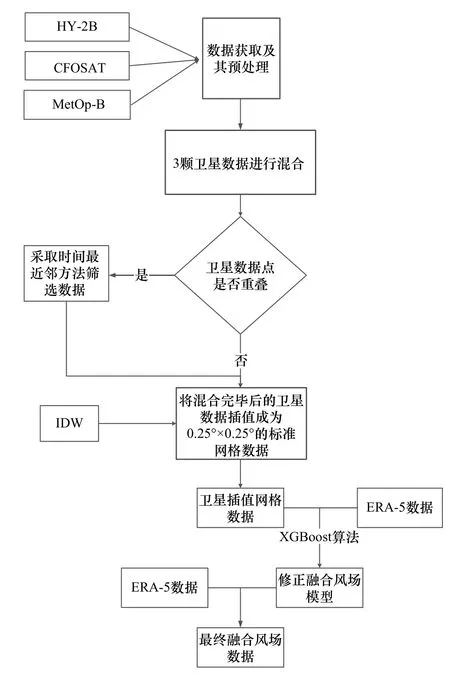
图1 海面融合风场生成流程Fig. 1 The process of obtaining the sea surface fusion wind
3.1 插值方法
3.1.1 反距离加权插值算法
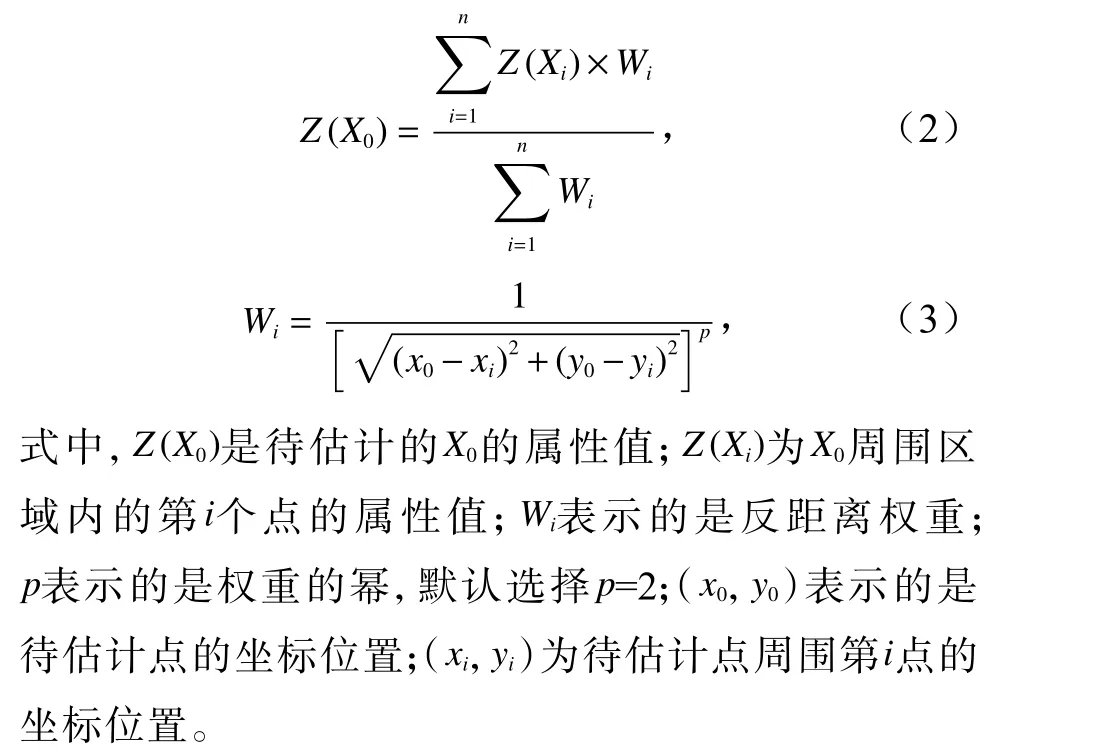
当前对气象要素等进行插值的算法有很多[23–28],本文选取的插值算法为反距离权重法(IDW)。IDW插值是一种经常使用的空间插值方法,在1972 年被美国国家气象局首次提出[29–31]。它的逻辑来源于地理学第一定律—相近相似原理。IDW是通过插值点与样本点之间距离的倒数为权重进行加权平均,与插值点越靠近的样本点计算时所被赋予的权重值越大,权重值一般与距离成反比关系,所以称之为“反距离”加权。其计算公式可以表示为
3.2 生成修正融合风场模型
正如引言所说,本文使用卫星数据对ERA-5 数据进行修正融合,使得修正融合后的风场数据更加贴近真实值。研究流程如图1 所示,首先对混合后的卫星数据进行插值操作,空间上使用反距离加权插值算法(IDW),时间上采用最近邻方法将其插值成为0.25°×0.25°的标准网格数据。然后利用卫星插值数据和ERA-5 数据获取训练样本后进行训练,最终得到所需的XGBoost 模型,即修正融合风场模型。
3.2.1 修正融合方法
ERA-5 数据是全区域数据,其风场数据既涵盖了海洋区域,也包括了陆地区域。由于陆地风场和海洋风场的差异较大,详细分析请见4.1 节。因此为了研究的科学性及其可靠性,本文采用4 种方法来对ERA-5 数据进行修正,具体方法如下:
方法1:风速、风向修正(全区域)即D_S_A_XGBoost 模型。在XGBoost 训练的过程中,不区分海洋和陆地风场数据,全部用来进行模型的训练。
方法2:U、V修正(全区域)即U_V_A_XGBoost模型。与方法1 相同,训练过程中不区分海洋和陆地风场数据。区别在于方法1 中使用的训练数据为风速和风向,而方法2 中使用的训练数据为U10 和V10,训练结束后再合成风速和风向。
方法3:风速、风向修正(陆地掩码)即D_S_O_XGBoost 模型。训练过程中区分海洋和陆地风场数据,即使用陆地掩码将陆地风场数据剔除,不参与模型的训练。
方法4:U、V修正(陆地掩码)即U_V_O_XGBoost模型。与方法3 相同,训练过程中区分海洋和陆地风场数据。不同点在于方法3 中使用的训练数据为风速和风向,方法4 中使用的训练数据为U10 和V10,训练结束后再合成风速和风向进行修正。
3.2.2 样本生成
噪声与偏差、方差共同构成机器学习的泛化误差[32]。噪声普遍存在,具有随机性和不可控性,例如数据采集仪器等带来的随机性偏差就是噪声的一种,本文中海陆交界处的无效数据可视为卫星观测的噪声。机器学习训练允许且需要数据中噪声的存在,由含噪声数据训练得到的模型通常更具有鲁棒性,能够更好地在未知分布数据上推理。
本文采用局部训练,全局推理的方式进行研究。即使用所能获取到的区域内样本数据进行训练,训练得到的模型可以应用于整片区域。本文对于训练样本的获取过程如图2 所示。经过插值处理后的卫星数据与ERA-5 数据均为0.25°×0.25°的网格数据,本文使用卫星插值风场数据作为学习目标,选取卫星插值格点及其周围(5×5 窗口)的ERA-5 值作为训练特征,进行训练。图2a 绿色点表示的是卫星插值数据,周围5×5 格点为ERA-5 数据,当ERA-5 数据在5×5 空间格点中全部存在时,那么就会得到如图2b 的训练样本,若ERA-5 数据存在缺失,那么在该点就无法获取到训练样本。本文使用的训练样本为2020 年12 月21日至2021 年1 月21 日数据,测试数据为2021 年1 月31日卫星初始数据以及修正前后的ERA-5 数据。在研究过程中,本文针对0 时和12 时数据分别训练模型,即0 时刻修正模型以及12 时刻修正模型,其中训练过程中使用的训练集约400 000,验证集约40 000,测试集约60 000。
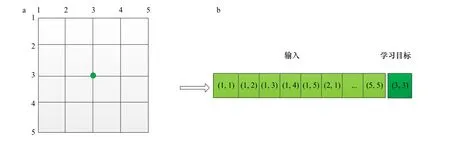
图2 训练样本生成Fig. 2 Generation of training samples
3.2.3 XGBoost 算法
集成学习通过构建并结合多个学习器来完成学习任务,比单一学习器获得显著优越的泛化性能。XGBoost 是在梯度下降树(Gradient Boosting Decision Tree,GBDT)的基础上对boosting 算法进行的改进,由多棵决策树迭代组成[33–36]。
XGBoost 算法的核心思想是每次构建一棵新树来学习上次预测得到的残差,即首先初始构建一棵树来预测一个值,得到预测值与实际值的残差,然后构建下一棵树来学习残差,直至构建K棵树,并在训练中对构建树不断优化,算法的整体思路如图3 所示。XGBoost 算法将训练得到的各个决策树预测值相加,得到模型最终的预测值。如公式所示:
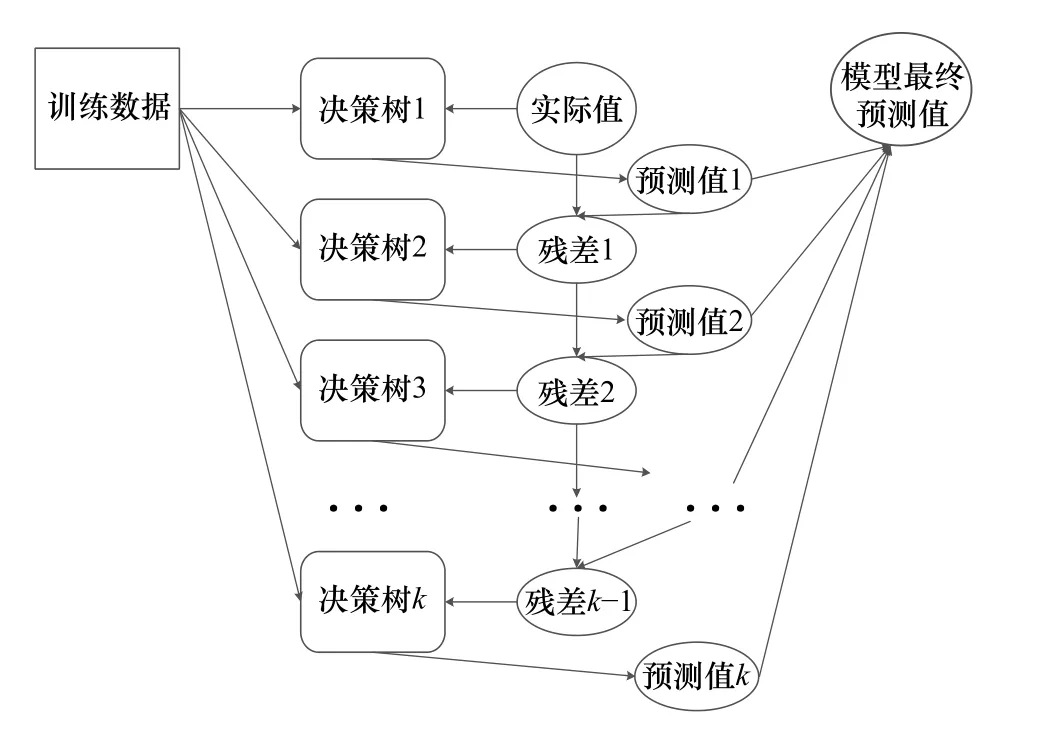
图3 XGBoost 模型训练流程Fig. 3 Training flow of the XGBoost model

式中,y^i为模型对于第i个样本的预测值;xi为 第i个样本的标签;K为分类回归树的数量;fk为第k棵树模型函数。
4 模型评价及其分析
本文采用均方根误差(Root Mean Square Error,RMSE)、绝对误差(Mean Absolute Error,MAE)、相关系数(R)、标准差(σ)以及中心均方根误差(E')5 种误差统计方法来对风速模型性能进行评估[21,37]。
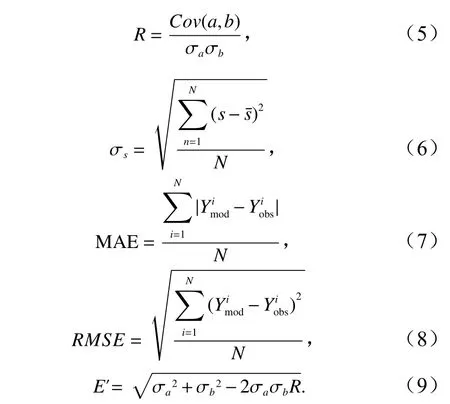
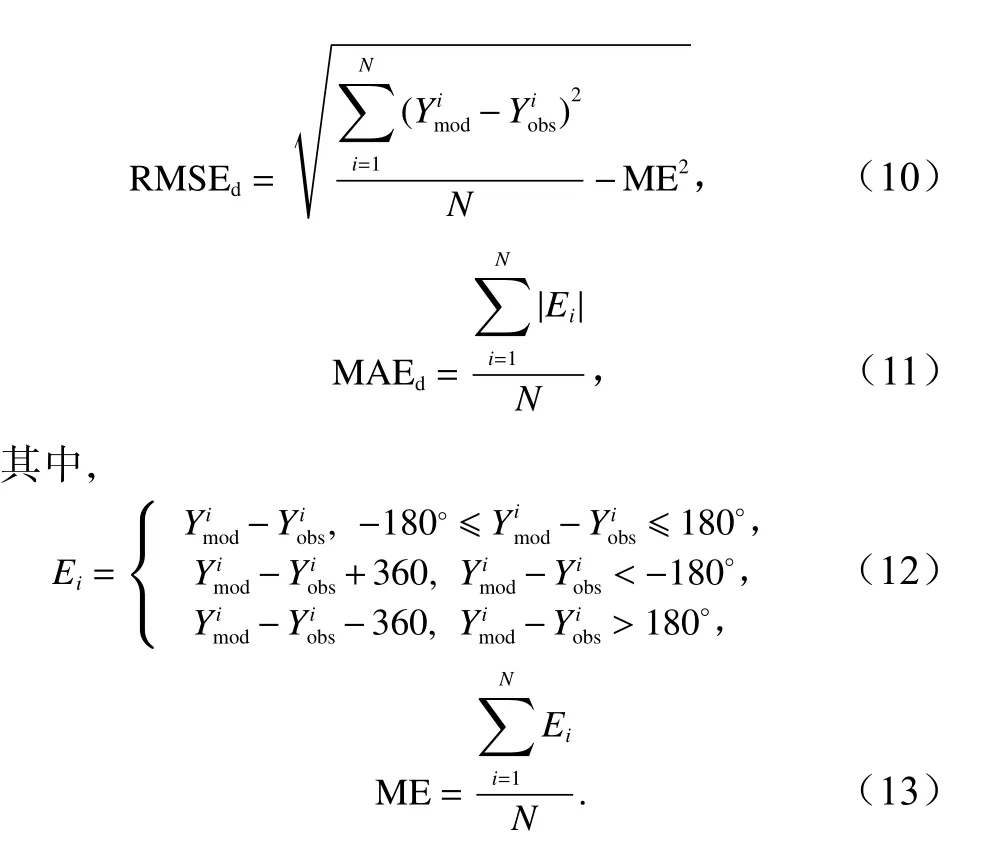
对于风向来说,使用常规的RMSE 以及MAE 并不能够很好地衡量研究结果,因此本文采用RMSEd以及MAEd[21]进行评价。
4.1 研究区域风场分析
在数据获取的过程中对ERA-5 风场数据中陆地部分和海洋部分进行分析,如图4 所示,陆地风场的风速分布和海洋风场的风速分布存在着很大的不同。陆地风场整体风速较小,其分布峰值约为2.5 m/s,大部分风力等级在5 级风以下,而在海洋风场中,风速分布峰值在6~8 m/s 之间,整体分布在0 m/s 至20.0 m/s,并且6 级以上大风发生频率较大。本文分析海洋中由于海面宽阔,没有遮挡物,对空气移动的摩擦力小,从而风速较大,陆地上由于地面粗糙,地形起伏,有植被及建筑物阻碍等对空气移动的摩擦较大,导致风速较小。介于陆地风场和海洋风场分布的不同,本研究采用4 种修正方法来对风场进行修正,即3.2 节中提出的修正方法。

图4 海陆风场风速统计直方图Fig. 4 Histogram of wind speed statistics for sea and land wind fields
4.2 ERA-5 修正融合结果分析
融合风场模型在(0°~45°N,100°E~180°)研究区域内进行机器推理,其中全区域内共计58 101 个点,在推理过程中由于5×5 窗口的存在,模型最终对56 109 个点进行修正。推理过程中模型输入为ERA-5数据,且在CPU 上进行,当前实验使用的CPU 型号为Intel(R) Xeon(R) CPU E5-2 690 v4 @ 2.60GHz,单时刻推理平均用时约为2.1 s。
4.2.1 原始卫星数据评价
在机器学习领域中,以未参与训练的真值数据检验模型(模型测试与评价)必不可少。本文以ERA-5 风场数据作为输入,以卫星插值数据作为学习目标训练融合模型,该模型期望从ERA-5 风场推理得出卫星风场(本文称为融合风场便于和卫星真值相区分)。若推理得出的融合风场相较于ERA-5 风场更加接近卫星原始数据,即说明融合风场模型有效。所以本文以未参与模型训练的卫星原始数据进行测试评价。
一般机器学习的评价所用真值数据和模型推理数据处于同样的网格点。融合模型推理得到数据处于ERA-5 的网格点,与卫星原始数据位置并不一样,而作为评价的卫星原始数据是不能做任何插值处理的。本文是将融合风场数据再插值回到卫星原始数据点进行比较。由于模型本身的学习目标是插值后卫星数据,而检验和评价却使用卫星原始数据,这其实是超出一般机器学习检验的更高和更严的要求。如能在这一更高要求下,融合模型也能得到很好的结果,则说明该融合方法是有效的。
实验中测试数据为2021 年1 月31 日00 时和12 时数据,共计约130 000 个。实验使用训练完毕的XGBoost 模型对ERA-5 数据进行修正,得到修正后的ERA-5 数据分别插值到对应时间点的卫星数据上,即将卫星数据作为真值,计算RMSE 等,最终实验结果如下所示。
(1)表1 和表2 展示了对于U_V_A_XGBoost 模型和D_S_A_XGBoost 模型的评价信息及结果。

表1 卫星评价数据信息(全区域)Table 1 Satellite data information used in the test (whole region)
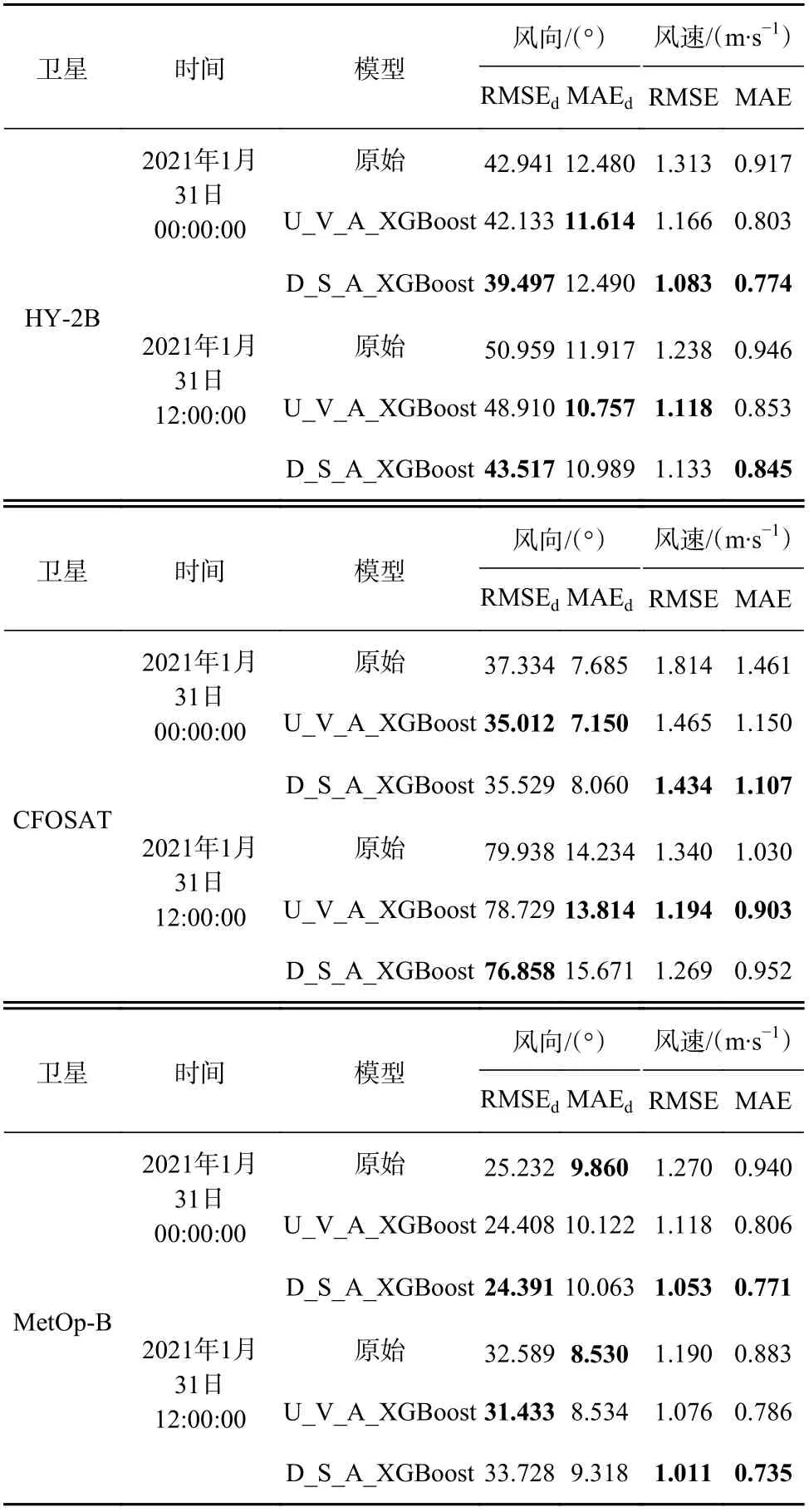
表2 全区域训练模型评价结果Table 2 Evaluation results of the whole regional training model
(2)表3 和表4 展示了对于U_V_O_XGBoost 模型和D_S_O_XGBoost 模型的评价信息及结果。

表3 卫星评价数据信息(陆地掩码)Table 3 Satellite data information used in the test (land mask)
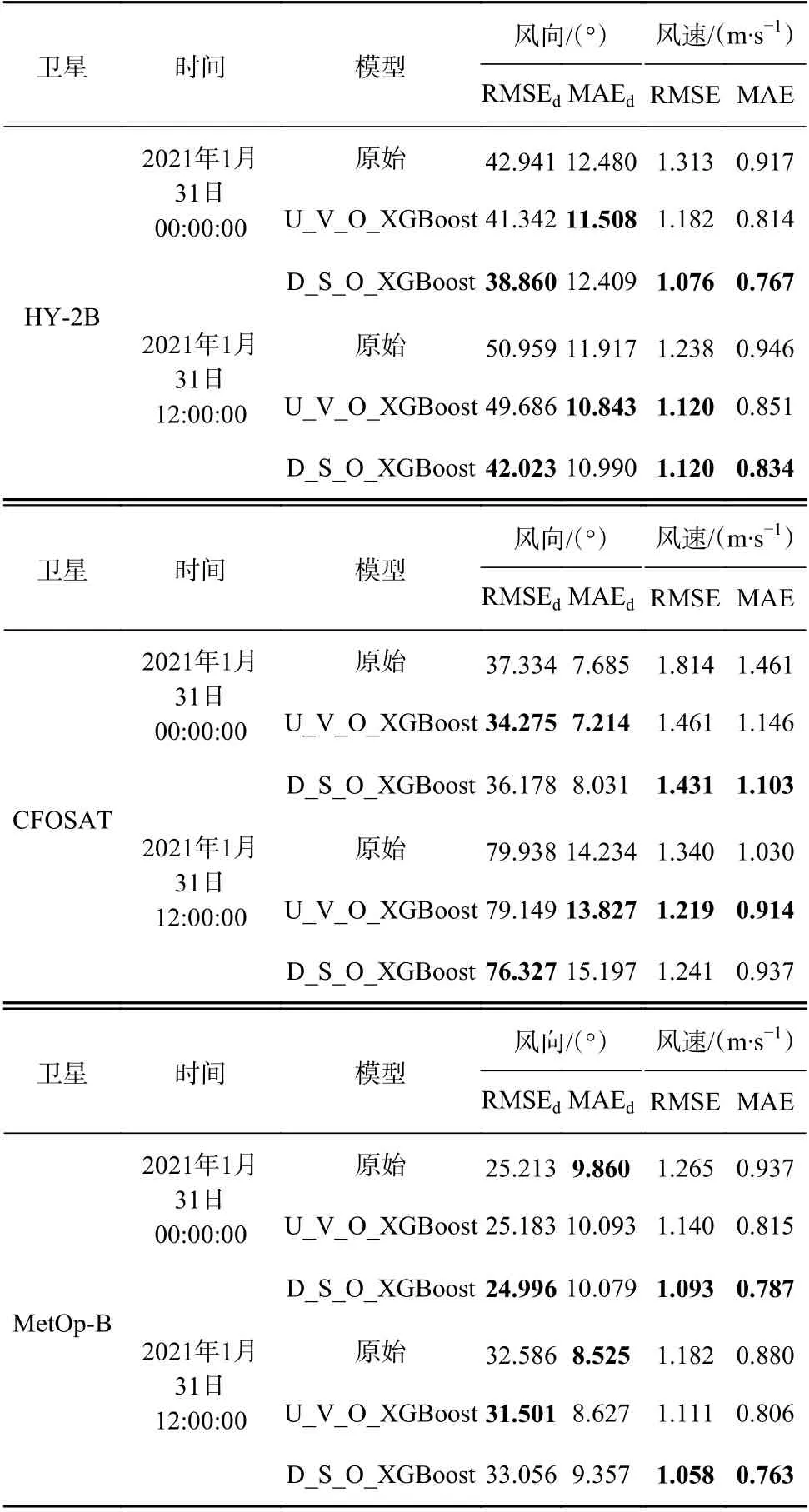
表4 陆地掩码训练模型评价结果Table 4 Evaluation results of land mask training model
对比表1 数据信息和表3 数据信息可以发现,表3 中的MetOp-B 卫星测试数据比表1 中MetOp-B 卫星测试数据少,这是因为模型U_V_O_XGBoost和U_V_O_XGBoost 是基于陆地掩码的模型,所以在测试的时候贴近陆地的卫星数据可能无法进行评估,从而导致了测试数据减少。
从表2 中分析,对于风向来说,U_V_A_XGBoost 模型在MAEd方面表现最好,除了在MetOp-B 卫星上有所上升,在HY-2B 和CFOSAT 卫星上均下降,在RMSEd方面,D_S_A_XGBoost 模型的表现较好,但在2021 年1 月31 日12 时的测试样例中,在MetOp-B 评价结果中出现了上升的情况,而U_V_A_XGBoost 模型表现稳定,全部呈现下降趋势。对于风速来说,不论是D_S_A_XGBoost 模型还是U_V_A_XGBoost 模型,在RMSE以及MAE 方面结果均下降。整体来说,U_V_A_XGBoost 模型的表现较稳定。
从表4 进行分析,对于风向来说,U_V_O_XGBoost模型在MAEd方面表现最好,与表2 中U_V_A_XGBoost模型的表现类似,除了在MetOp-B 卫星上有所上升,在HY-2B 和CFOSAT 卫星结果中均下降,在RMSEd方面,D_S_O_XGBoost 模型表现整体要好于U_V_O_XGBoost 模型,但是同样在2021 年1 月31 日12 时的测试样例中,出现了上升的情况,而U_V_O_XGBoost 模型一直保持下降。对于风速来说,U_V_O_XGBoost 模型和D_S_O_XGBoost 模型均表现良好,不论是在RMSE还是在MAE 方面,测试结果均下降。整体来说,U_V_O_XGBoost 模型的稳定性较好。
综上所述,所有的模型在HY-2B 卫星和CFOSAT卫星上的测试结果表现良好,但是在MetOp-B 卫星的风向修正方面表现不理想,研究分析认为,导致该现象的原因可能有两点,一是ERA-5 再分析数据的制作过程中使用了MetOp-B 卫星数据,所以修正后的ERA-5 数据可能会与MetOp-B 卫星数据偏差增大;二是HY-2B 卫星和CFOSAT 卫星都是中国参与研制并运行的卫星,而MetOp-B 卫星是欧洲卫星,卫星数据之间可能存在差异,模型的训练过程中可能更加偏向了HY-2B 卫星和CFOSAT 卫星,所以导致MetOp-B 卫星的模型结果不佳。根据表2 和表4 的模型结果发现,使用U、V分量修正风速风向的研究方法在稳定性上要好于使用直接风速风向进行修正的研究方法。
图5 表示的是U_V_O_XGBoost 模型(模型选择的具体原因参见4.2.2 节)修正结果在HY-2B 卫星、CFOSAT 卫星以及MetOp-B 卫星上的关于风向的展示,挑选的时间为2021 年1 月31 日12 时。其中图中描述的是ERA-5数据的插值结果与该点上卫星数据偏差的绝对值即MAEd,图5a 和图5b 表示HY-2B 卫星效果图,图5c 和图5d 表示CFOSAT 卫星效果图,图5e 和图5f 表示MetOp-B 卫星效果图。左侧图表示的是原始ERA-5数据与卫星数据之间的偏差,右侧图表示的是修正后的ERA-5 数据与卫星数据之间的偏差。图6 为U_V_O_XGBoost 模型修正结果在HY-2B、CFOSAT 以及MetOp-B 卫星上的关于风速的展示,所选时间为2021 年1 月31 日12 时。其中图中描述的是ERA-5 数据的插值结果与该点上卫星数据偏差的绝对值即MAE。图6a 和图6b 表示HY-2B 卫星效果图,图6c 和图6d 表示CFOSAT 卫星效果图,图6e和图6f 表示MetOp-B 卫星效果图。
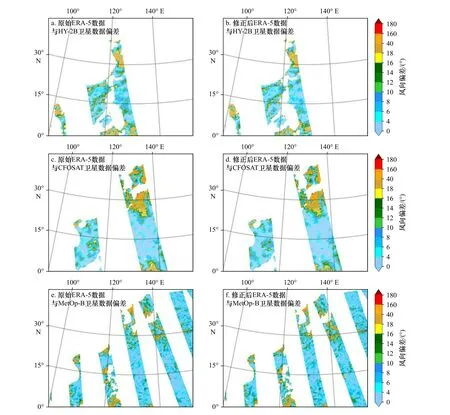
图5 ERA-5 修正的风向效果图Fig. 5 Wind direction effect diagram of ERA-5 correction experiment
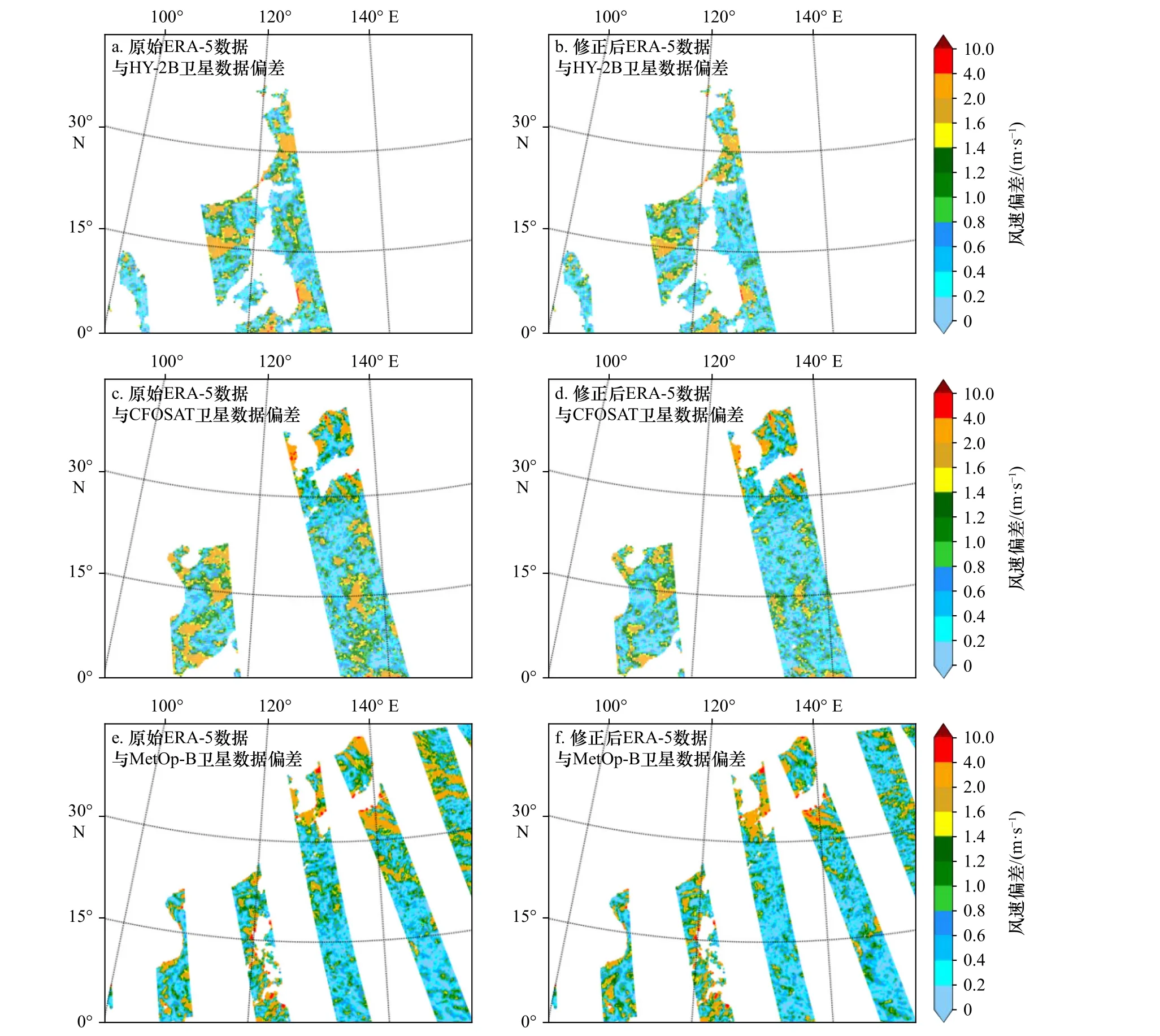
图6 ERA-5 修正的风速效果图Fig. 6 Wind speed effect diagram of ERA-5 correction experiment
4.2.2 浮标评价
本文使用浮标数据对ERA-5 数据的修正方法进行评价,选取的浮标为经纬度在8°N,165°E,距离海面4 m 高的TAO 浮标,选取的时间范围为2020 年12 月至2021 年1 月共计两个月的数据。本文剔除与浮标风速相差3 倍标准差的数据,并剔除与浮标风向相差大于90°的数据[21,38],原因在于本文认定该点数据可能存在较为明显的误差,该点数据可能会对整体的数据评价造成较大的影响。最终ERA-5 数据与浮标数据匹配后得到123 个测试样例,计算相关系数等评价指标,结果如图7 所示。
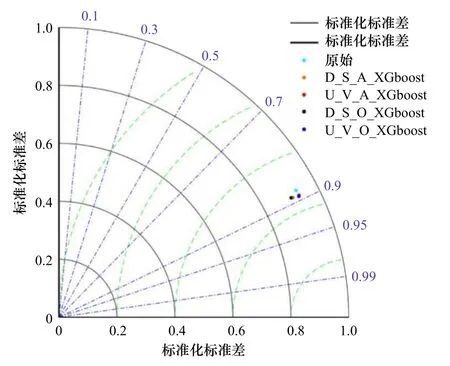
图7 风速泰勒图Fig. 7 Tyler diagram of wind speed
图7 中展示的是4 个模型方法的结果和原始ERA-5 风速数据与浮标风速数据之间的差异,从图中可以看出,使用U_V_O_XGBoost 模型修正的ERA-5 数据与浮标数据的相关系数最高,中心均方根误差最小,整体结果要好于原始ERA-5 数据的结果,意味着生成的融合风场数据更加接近浮标数据。
图8 表示的是浮标数据与ERA-5 原始数据以及U_V_O_XGBoost 模型修正后的融合风场数据的匹配情况。从图中可以看出风速在不同时刻差异明显,例如风速可以从5 m/s 迅速增到9 m/s,同样可以从约13 m/s 迅速减小到5 m/s,风速前后相差较大。通过观察发现,在图中黑框区域,修正融合风场数据与浮标数据的差距明显减小,表明修正融合风场数据更加接近浮标数据。图9 中分别表示的是ERA-5 数据与浮标数据的风速相关性以及融合风场与浮标数据的风速相关性。从图9 中可以看出融合风场风速相较于ERA-5 数据来说相关系数有所提高。
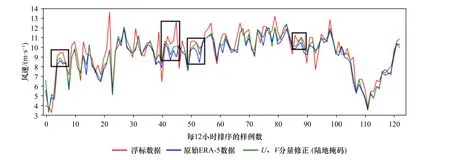
图8 浮标数据与ERA-5 数据的风速对比Fig. 8 Comparison of wind speed between buoy data and ERA-5 data
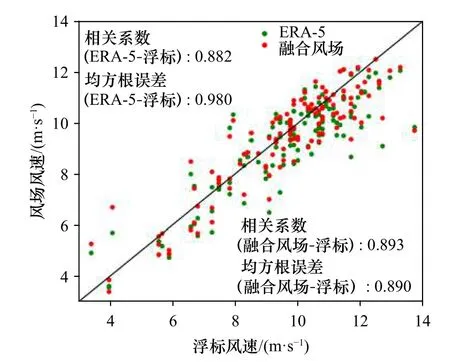
图9 风速散点图Fig. 9 Scatter plot about wind speed
本文采用Adaboost 以及Random Forest 算法进行风场融合研究,与XGBoost 方法进行比较,结果如表5 所示,其中相关系数、均方根误差以及标准差的计算公式在第4 章进行了说明。从表中可以看出,Adaboost、Random Forest 以及XGBoost 等算法生成的融合风场数据相比ERA-5 数据来说与浮标的相关系数均有所提高,即更加接近于浮标数据,且XGBoost 算法相对来说效果最好。
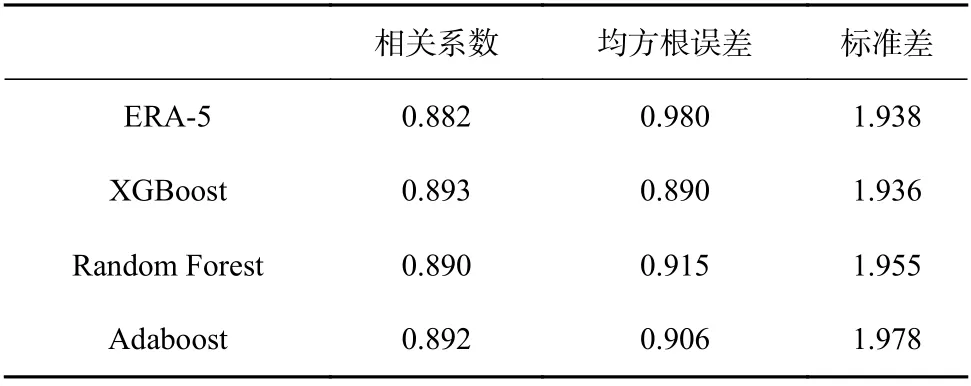
表5 不同机器学习算法风场融合结果Table 5 Wind field fusion results of different machine learning algorithms
4.2.3 融合时间对比
本文目的在于降低风场融合的硬件要求,提高融合速度,且保证融合风场的质量。因此本文对融合时间进行统计对比,数据结果如表6 所示。表中XGBoost 表示的是本文采用XGBoost 模型针对单一风场要素进行海面风场融合的方法,插值方法表示的是采用传统的IDW 方法针对单一风场要素进行海面风场融合。本文在0°~45°N ,0°~180°区域共计58 101个网格点进行海面风场融合,针对1 个月数据共计60 次融合时间进行统计分析,结果如表6 所示。XGBoost 模型方法融合时间明显优于传统插值方法。
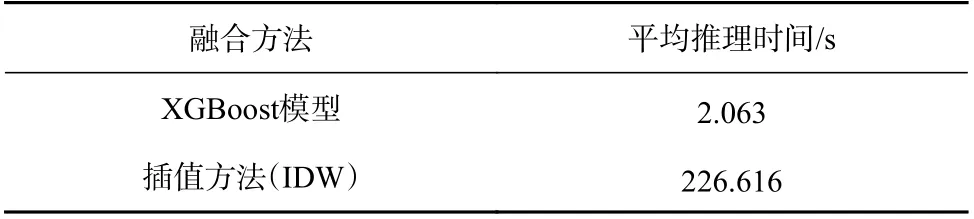
表6 融合时间对比Table 6 Comparison of fusion time
4.3 融合风场展示
本文以ERA-5 数据作为模型输入,以卫星插值数据作为学习目标进行模型训练,得到海面风场修正融合模型,最终采用训练完毕的海面风场修正融合模型进行推理,得到融合风场。图10 中表示的是2021 年1 月30 日00 时的融合情况,从图10 中可以看出卫星数据与ERA-5 数据以及融合风场数据均具有大致相同的数据分布。从上述3 处风场分布来看,融合风场数据更加贴近卫星数据,即风速达到12.5 m/s 以上的区域中融合风场更加接近卫星数据分布情况。图11展示的是融合风场中风速在2021 年1 月27 日12 时至2021 年1 月31 日12 时的连续时空分布情况,其时间分辨率为12 h,图12 展示的是该时间段融合风场整体分布情况,由图可以看出该时段西北太平洋区域风场多为东北风或西北风。
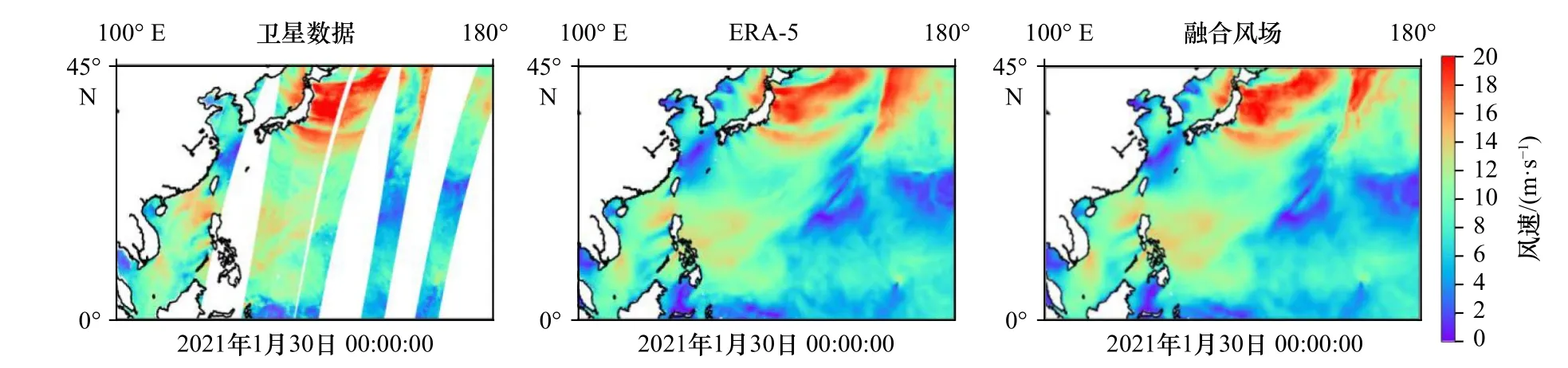
图10 风速对比图Fig. 10 Comparison chart of wind speed data
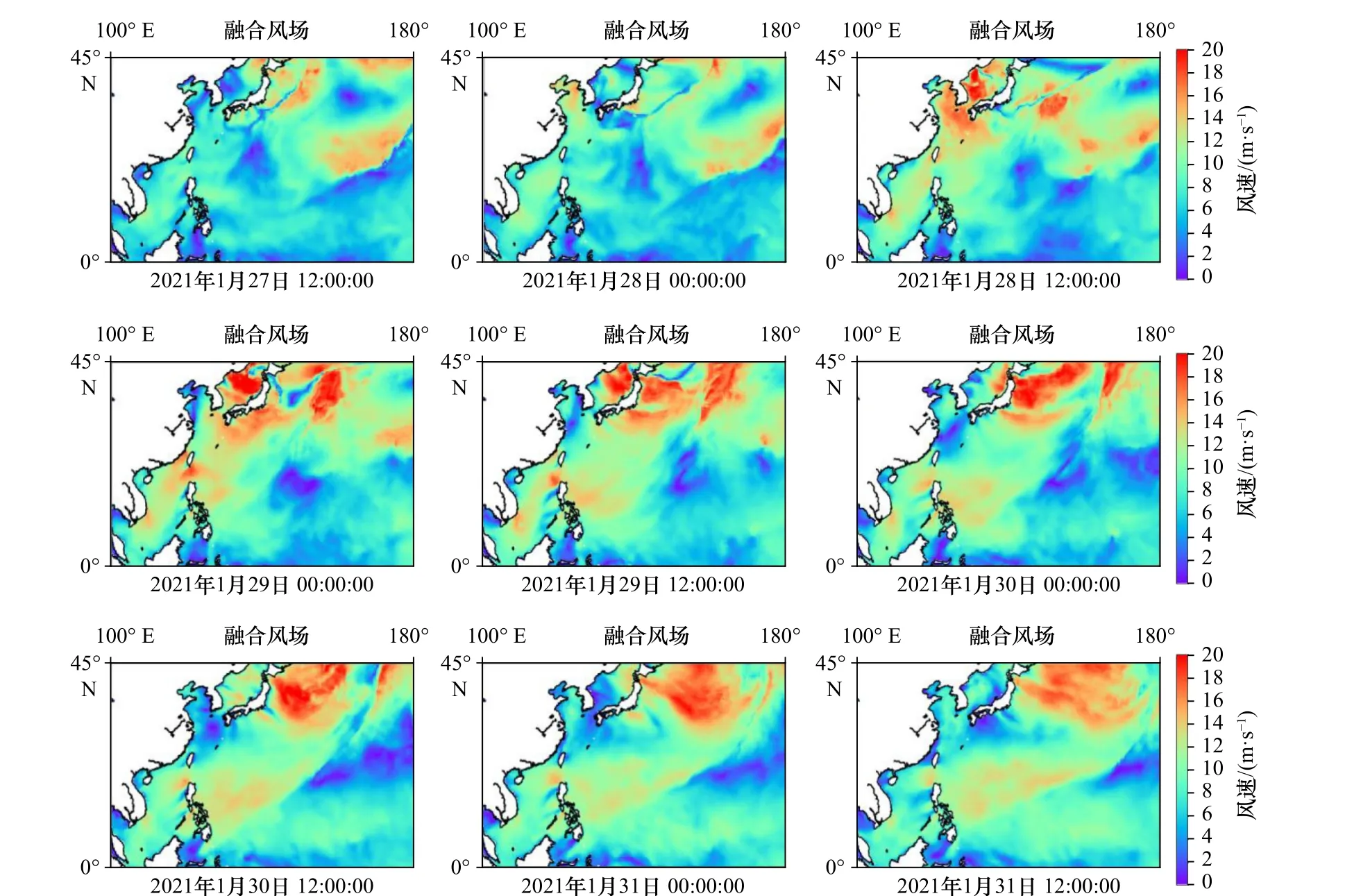
图11 融合风速效果图Fig. 11 The effect of wind speed after fusion
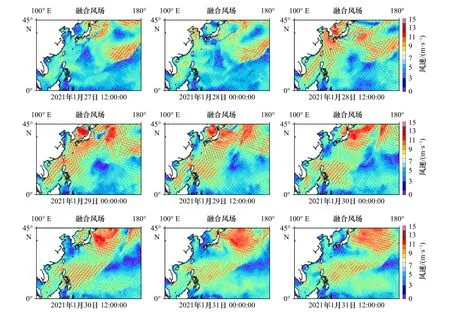
图12 融合风场效果图Fig. 12 Rendering of the fusion wind field
5 总结
本文使用CFOSAT 卫星、HY-2B 卫星、MetOp-B卫星数据以及ERA-5 再分析数据,利用传统机器学习XGBoost 在研究区域(0°~45°N,100°E~180°)内进行生成融合风场的研究。研究首先以卫星数据作为学习目标,将ERA-5 数据作为模型输入训练得到修正融合风场生成模型,然后利用融合风场生成模型进行机器推理最终得到全区域空间分辨率为0.25°×0.25°,时间分辨率为12 h 的融合风场。其中,在机器推理过程中,生成单时刻全区域融合风场的时间仅需要约2 s,相比较传统融合方法来说,该模型方法更加快速高效。文中共提出4 种模型进行融合风场的研究,结论如下:
(1)使用U、V分量修正风速风向的研究方法比直接修正风速风向的研究方法在结果上更加稳定。
(2) U_V_O_XGBoost 模型得到的融合风场数据在风速方面最为接近浮标数据,同时风场修正结果稳定。
(3)研究中出现了修正融合结果在MetOp-B 卫星风向方面上升,在HY-2B 卫星和CFOSAT 卫星表现良好的情况,分析得到HY-2B 卫星和CFOSAT 卫星均为中国参与研制并运行,而MetOp-B 卫星为欧洲气象卫星,两者存在差异,该差异导致了模型在学习过程中出现偏向。
总而言之,传统机器学习方法在对ERA-5 再分析数据修正融合的过程中,能够有效地学习到卫星数据的分布特征,使得修正融合后的风场数据更加贴近研究区域内卫星数据分布,从而提高生成的融合风场的质量。对于目前,深度学习取得了重大进展,深度学习擅长抽取高维数据的复杂结构,通过足够多的数据和组合,学习到非常复杂的函数关系[39]。因此本文下一步准备将深度学习方法应用到融合风场的研究中,提高融合风场精度。
猜你喜欢
家教世界·创新阅读(2023年3期)2023-06-09 00:19:23
家教世界·创新阅读(2023年2期)2023-06-07 23:53:42
家教世界(2023年7期)2023-03-22 12:11:24
家教世界(2023年4期)2023-03-04 07:31:28
成都信息工程大学学报(2021年5期)2021-12-30 06:25:16
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
能源(2017年8期)2017-10-18 00:47:39
通信电源技术(2016年1期)2016-04-16 04:57:35
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48