
电荷平衡和自动跟踪型加速度计电流数字转换
2022-11-11 06:07谢元平丁浩珅樊振方于旭东
中国惯性技术学报 2022年4期
谢元平,丁浩珅,樊振方,于旭东,罗 晖
(国防科技大学 前沿交叉学科学院,长沙 410073)
加速度计是惯性导航系统的核心部件之一,通常加速度计输出为模拟电流信号,为便于导航计算机数字化处理,需经过模数转换。目前常用的加速度计电流信号转换电路主要有I/F[1-3]和A/D[4,5]转换两种方案,主要衡量指标包括量程、非线性、分辨率、功耗、温度稳定性等。
A/D转换方案将电流信号转换成电压信号,再由高分辨率的模数转换器转换为数字信号,具有原理简单、体积小、功耗低等优点。主要缺点有:容易受噪声影响;输出不是电流的连续积分,存在信息丢失问题。
I/F转换方案采用电流积分和电荷平衡原理将电流信号转换为数字脉冲,可对输入电流进行连续测量,不存在丢失信息的问题,具有精度高、抗干扰性能好、温度稳定性好等优点。主要缺点包括:功耗大,对每一路电流输入需要正负两路恒流源用于电荷平衡,且恒流源电流必须大于输入电流最大值,恒流源功耗随电流测量范围线性增加;分辨率低,量化噪声大,积分输出变化达到几伏才会产生一个计数脉冲,在小信号电流输入时电荷需要积累很长时间才会产生一个计数脉冲。
改进的I/F加A/D细分方案[6]虽然可以提高分辨率,但细分数和细分精度受积分输出线性度影响[7],特别是受电荷平衡瞬间的积分输出动态特性影响,并且I/F功耗大的问题依然存在。
本文提出一种基于电荷平衡和自动跟踪原理的电流数字转换方法(CDC)。首先,分析了其工作原理,然后设计了单路CDC线路,并对其标度因数不对称性和非线性、高低温性能、分辨率等参数进行了测量。
1 原 理
图1是电荷平衡和自动跟踪型加速度计电流数字转换电路的原理框图,包括积分电路、模数转换器(A/D)、数字信号处理器(DSP)、数模转换器(D/A)、电压电流转换电路(V/I)、温度传感器。其中数字信号处理器包含控制处理、求和、脉冲生成等模块。
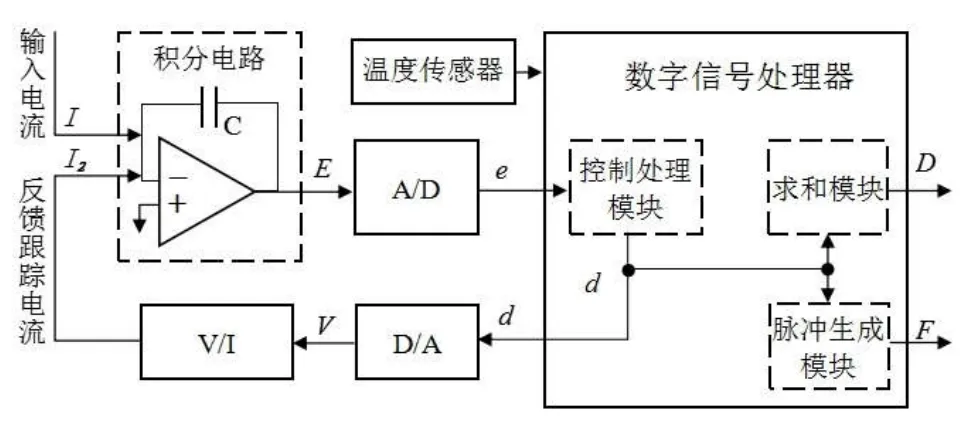
图1 电荷平衡和自动跟踪型加速度计电流数字转换电路原理框图Fig.1 Schematic Diagram of charge-balancing and automatic tracking current to digital converter for accelerometer
积分电路对输入电流I、反馈跟踪电流2I进行积分输出误差电压E,DSP依据误差电压E实时调整数字信号d并定时输出,d经D/A和V/I转换为反馈跟踪电流。实时反馈控制使误差电压E稳定在0附近,二者电荷平衡。

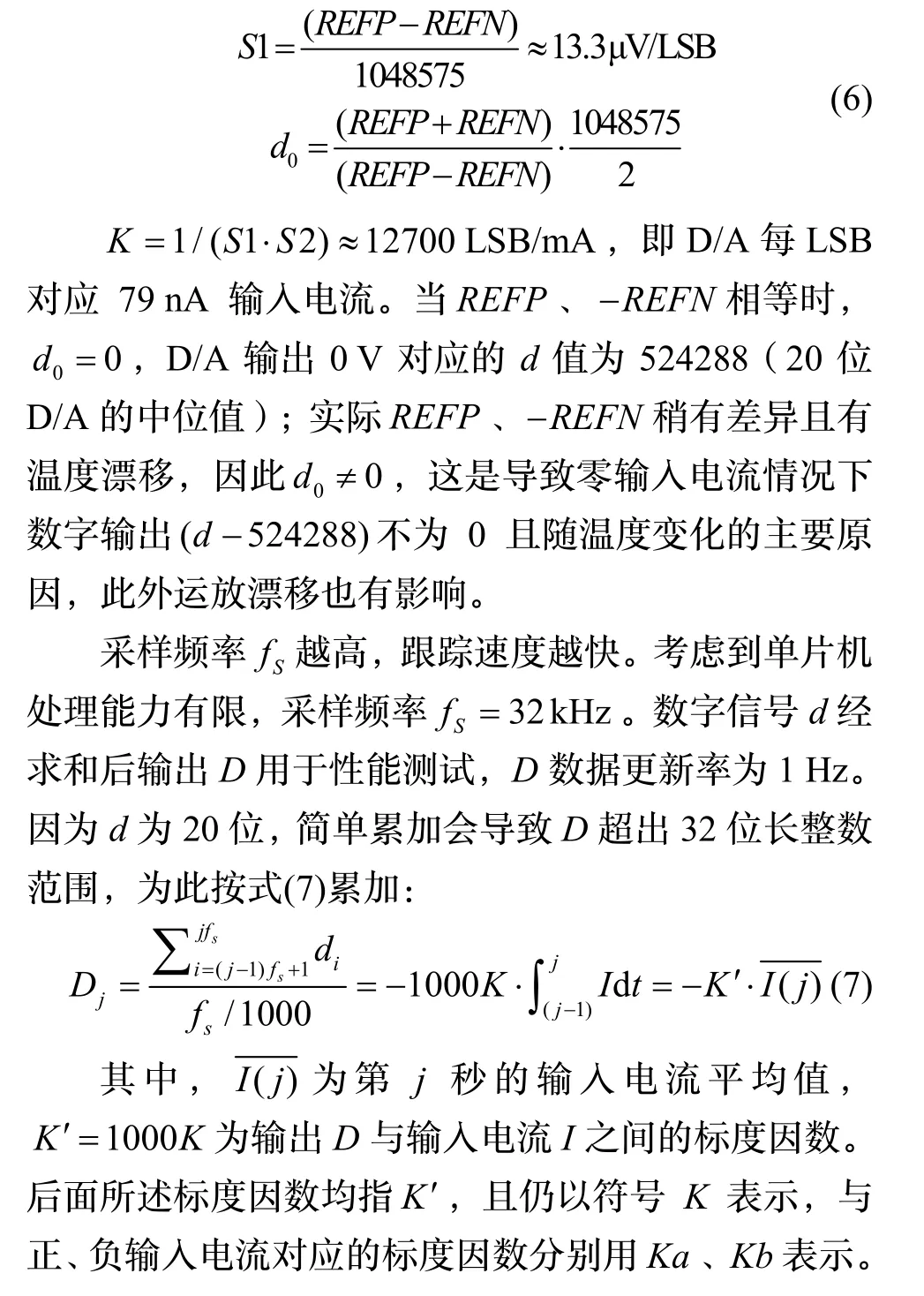
其中,K=1/(S1 ·S2)为数字输出d与输入电流I之间的标度因数,单位为LSB/mA。
式(3)表明,数字信号d的求和代表输入电流I的连续积分。由式(4)可见,数字信号d正比于输入电流I在采样周期τ内的平均,当采样频率fS较高时d可视为输入电流I的实时采样。通常,D/A采用16位或16位以上数模转换芯片,相应地d位数也大于等于16位,因此当采样频率fS较高时d代表输入电流I的实时、高分辨率采样。
求和模块对Nτ时间间隔内的数字信号d求和以降低数据输出速率,其输出D代表该时间间隔内的输入电流I积分。D的位数可根据d位数、N以及所需分辨率适当取值。脉冲生成模块输出与常规I/F电路类似的数字脉冲信号F,脉冲频率与输入电流I成正比。
电荷平衡和自动跟踪型加速度计电流数字转换电路的优点包括:
采用电荷平衡原理,可对输入电流进行连续测量,不存在信息丢失的问题,精度高,抗干扰性能好。
分辨率高,测量微小电流耗时少。不同于常规I/F转换方案的积分输出变化达到几伏才会产生一个计数脉冲,CDC中积分电路输出变化超过A/D分辨率(可优于mV)即可被DSP识别并相应调整反馈跟踪电流I2,因此分辨率较常规I/F电路高很多,测量微小电流所需时间也大幅度减少,可同时满足惯性导航系统对加速度计电流信号转换电路大量程和高分辨率的要求。
功耗低。与I/F转换方案中需要正负两路恒流源用于电荷平衡因而功耗大不同,反馈跟踪电流I2跟随输入电流I变化,而惯性导航系统中加速度计输出电流I大部分时间为小电流,因此CDC电路平均功耗相比I/F低很多。提高电流测量范围对电路的平均功耗影响很小。
2 原理样机实验
可大幅降低积分电路运放摆率和输出电流要求,减小积分电容漏电流。积分电路中积分电容漏电流是影响转换电路精度的重要因素,积分电容两端电压越大,漏电流越大[2];积分电容两端电压变化越快,对运放摆率和输出电流要求越高。I/F转换方案中积分电路输出通常在几伏内变化,且电荷平衡期间输出电压快速变化,因而对运放摆率和输出电流要求较高[8]。CDC积分电路输出E稳定在0附近,积分电容两端电压几乎为0,因而不仅可大幅降低运放摆率和输出电流要求,也减小了积分电容漏电流,有利于提高转换精度。
数字信号输出方便进一步信息处理。d代表输入电流I的实时、高分辨率采样,可根据d对标度因数K进行对称性、非线性补偿,也可对标度因数K及零偏进行温度补偿以提高转换精度和温度稳定性。还可对标度因数K进行归一化处理使得K与电路具体参数无关,电路用于惯性导航系统时可快速更换而无需重新标定系统。
2.1 标度因数对称性和非线性
两次高低温实验(以0412、0422表示)分别测试了+27℃(室温)、+60℃、-40℃下的标度因数不对称性和非线性,因两次实验标度因数相差不超过3 ppm,故这里只给出0412结果。+27℃下CDC数字输出D与输入电流I测试数据如表1所示,各温度点标度因数统计结果如表2-3所示。
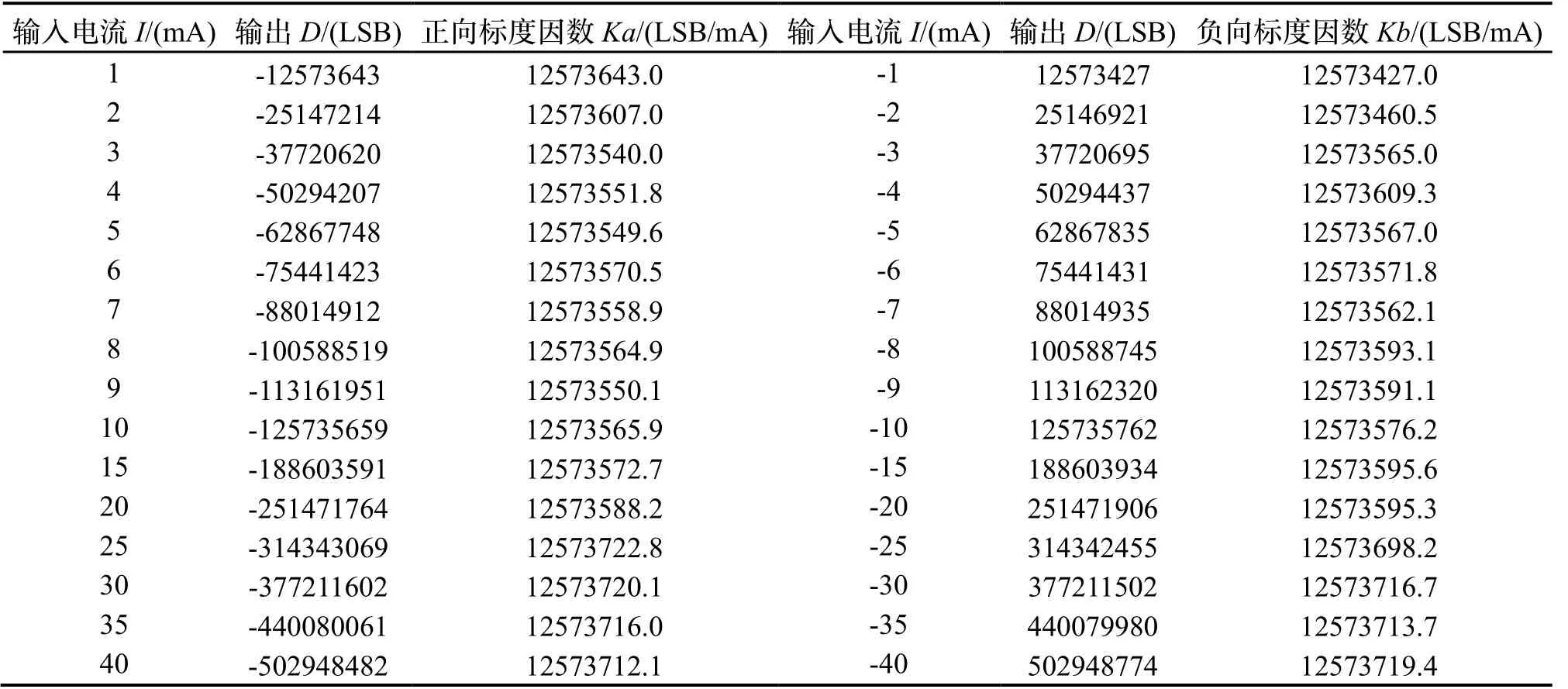
表1 数字输出D与输入电流I测试数据(+27℃)Tab.1 Output D v.s.input current I at +27℃
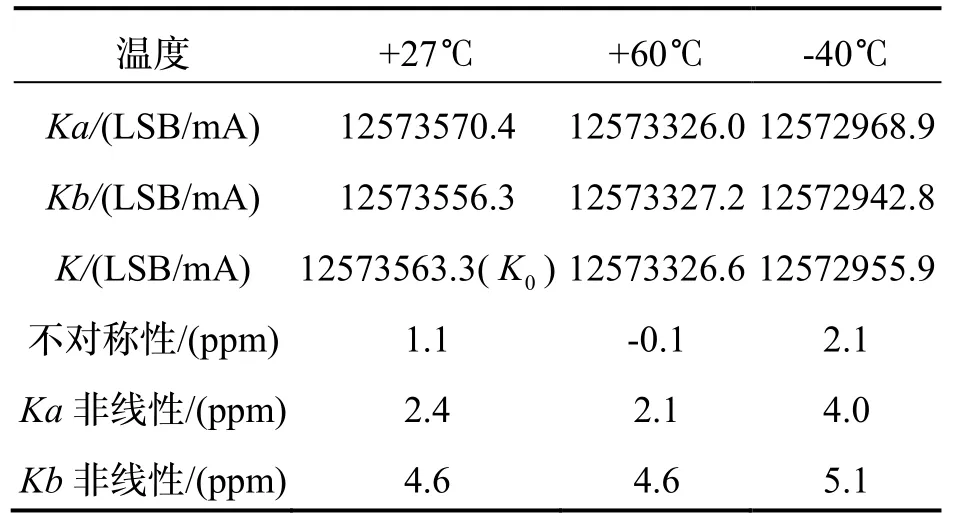
表2 电流区间(-15 mA~+15 mA)标度因数统计结果Tab.2 Scale factor of the current interval from -15 mA to +15 mA
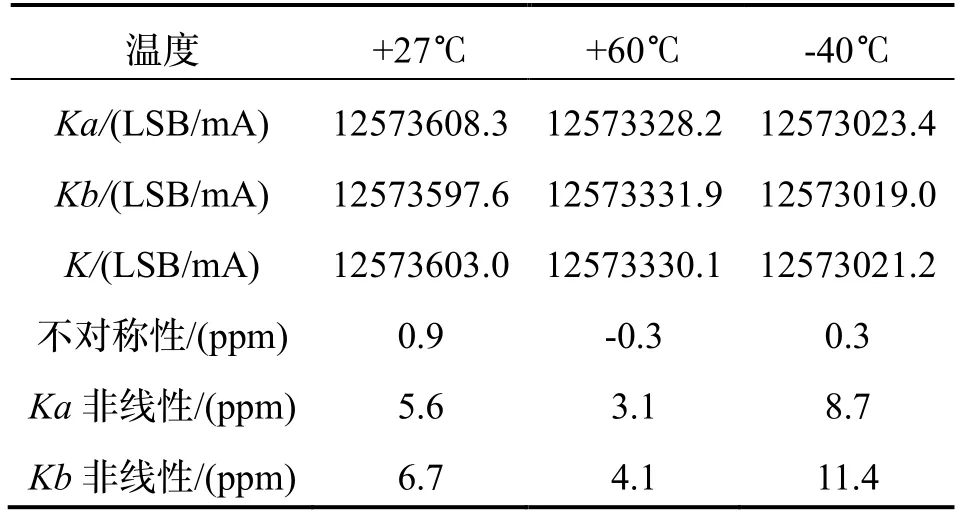
表3 电流区间(-40 mA~+40 mA)标度因数统计结果Tab.3 Scale factor of the current interval from -40 mA to +40 mA
表1中D为所测电流对应输出D与0 mA电流对应输出0D(零偏)的差值,标度因数不对称性、非线性计算公式如下[3]:

+27℃、+60℃、-40℃标度因数K随电流变化曲线如图2所示。

图2 标度因数K随电流I变化曲线Fig.2 Scale factor v.s.input current
由表2-3以及图2可见:
1)标度因数不对称性优于5 ppm。
2)输入电流-15 mA~15 mA时,三个温度点标度因数非线性基本在5 ppm以内。
3)输入电流-40 mA~40 mA时,+27℃、+60℃的标度因数非线性优于10 ppm,-40℃温度点标度因数非线性稍差。分析表明该现象与测量大电流时的温升、标度因数温度灵敏度有关。测量时手动切换电流,输入电流顺序为:1 mA~15 mA;-1 mA~-15 mA;20 mA~40 mA;0 mA半分钟;-20 mA~-40 mA;±20 mA以上大电流测量时间共约5分钟。由于CDC反馈跟踪电流2I跟随输入电流变化,加之电路板尺寸较小且没有任何导热措施,因此大电流输入时电路功耗增加、温度上升。单片机温度传感器显示测量大电流时温度上升了1℃。随电流增加的功耗主要由V/I电路承担,故V/I电路温升更大,高低温实验后另加PT1000铂电阻温度传感器表明大电流测试期间V/I电路温度会上升12~15℃。温度变化导致标度因数非线性测试结果变差,这也使得表2-3中Kb非线性普遍比Ka非线性差。由图2可见,对于20 mA以上大电流,+27℃标度因数基本不随电流变化,+60℃标度因数随电流增加而下降,-40℃标度因数随电流增加而上升,这与后面给出的标度因数温度特性有关。温箱+27℃、+60℃、-40℃对应的单片机温度传感器温度分别为+38℃、+65℃、-24℃,在这三个温度点附近标度因数随温度变化关系分别是基本不变、减小、增加(见图4),导致了图2中大电流下标度因数的不同变化。
在-40℃温度点再次测量并减小大电流测量时间,得到正、负标度因数非线性均优于10 ppm。
考虑到实际应用时加速度计输出大电流持续时间比较短、实际温升小,特别是在改进电路热设计后输入电流对局部电路的影响可大幅度减小,因此容易保证各温度下标度因数非线性优于10 ppm。
4)图2所示每个温度点下的标度因数随电流变化曲线分为明显的几段,如1~2 mA、3~20 mA、25~40 mA以及相应的负电流,分段与外部电流源的不同量程区间一致,因此标度因数K误差还可能与电流源较长时间未校准、电流源各档误差大小不同有关。
总之,标度因数非线性仍有较大改善空间,在改进电路热设计降低电路局部温升、消除外部电流源误差后,±40 mA电流范围内标度因数非线性有望优于5 ppm。此外由于d代表输入电流I的实时、高分辨率采样,可根据d对标度因数K进行对称性、非线性补偿进一步提高精度。
2.2 零偏和标度因数温度灵敏度
在温箱-40℃~+60℃变温条件下,固定输入电流10 mA,CDC电路自动定时在输入电流I和空载之间切换,可得到零偏D0和标度因数K随温度变化曲线,如图3-4所示。为直观计,零偏D0除以表2所示常温标度因数K0=12573563.3LSB/mA 转换为电流显示,标度因数也以(K/K0-1)表示相对变化,图3-4中温度为单片机温度传感器输出温度。

K K-随温度变化曲线Fig.6 0图6 补偿后标度因数0(/1)(/1)K K-v.s.Temperature after Compensation
由图3可见,零偏随温度单调变化,全温度区间变化220 nA,相当于37 μV电压漂移。由图4可见,全温度区间标度因数变化51 ppm,且标度因数随温度变化不是单调的。无论是零偏还是标度因数,不同变温条件下曲线存在差异,这主要是因为CDC电路各点温度和热传递特性不同,只有在稳态或者温变速度较小的情况下单片机温度传感器给出的温度T才与电路其它部分温度变化接近,而在变温速度较大时T和电路其它部分的温度变化曲线存在差异,例如对于升、降温的快速温变部分同一温度T对应的V/I电路温度并不相同。要减小标度因数和零偏的温度漂移,特别是不同变温条件下的差异,首先要优化局部电路如V/A电路、电压基准的热设计;其次可以增加特征点温度传感器,对零偏和标度因数进行温度补偿,温度补偿可采用查找表方法或者多元线性回归方法[9]。

图3 零偏随温度变化曲线Fig.3 Bias v.s.temperature
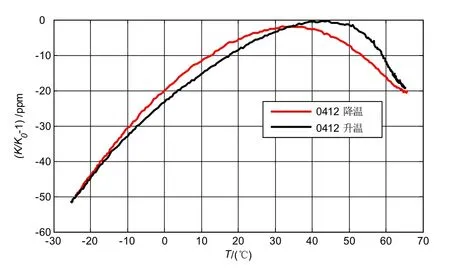
图4 标度因数(K/K0-1)随温度变化曲线Fig.4 (K/K0-1)v.s.temperature
利用0412零偏和标度因数升、降温数据的平均值建立查找表对0422变温曲线进行补偿,得到图5-6。0422变温实验输入电流为-10 mA,曲线I温度变化为+30℃至+60℃再至-40℃;II为-40℃至+30℃;III为+60℃至+30℃。补偿后零偏变化小于15 nA,标度因数变化小于10 ppm,因此即使只采用单片机内部温度传感器和简单的不考虑温度梯度的查找表方法也能取得较好的补偿结果。考虑到不同变温情况下测试结果有一定离散性,进行了多次不同变温速率的高低温实验,-40℃~+60℃温度区间内零偏变化小于240 nA、标度因数变化小于60 ppm,补偿后零偏变化小于30 nA、标度因数变化小于20 ppm。

图5 补偿后零偏随温度变化曲线Fig.5 Bias v.s.Temperature after compensation
2.3 电流分辨率
在0 mA、1 mA、-1 mA处分别以1 nA电流步进得到电流分辨率测试曲线如图7所示。为显示方便,将各自输出D分别减去0 mA、1 mA、-1 mA处的均值并除以0K转换为电流表示。

图7 电流分辨率测试曲线Fig.7 Current resolution tests near 0 mA,1 mA,-1 mA
可见在0 mA、1 mA、-1 mA附近±10 nA电流范围内,输入、输出仍然保持了良好的线性度。
依次输入电流0.5 nA、0 nA、-0.5 nA、0 nA、0.5 nA,各电流测试120 s,以第一个0 nA的输出为基准,输出分别为0.61 nA、0 nA、-0.65 nA、-0.17 nA、0.34 nA,相邻输出之差为0.48 nA~0.65 nA,因此电流分辨率优于0.5 nA。
电路在1 mA处的稳态输出如图8所示。图中数据已减去均值,时长3600 s。导致输出D波动的主要因素包括电路噪声、温度漂移、D/A有限位数。图8中输出D的1 s、10 s、100 s标准差分别为5.5、3.8、3.1(LSB),对应电流分别为0.4、0.3、0.2(nA);最后800 s的1 s、10 s、100 s标准差分别为4.6、2.4、1.2(LSB),对应电流分别为0.4、0.2、0.1(nA)。因此电路具备0.5 nA以下电流分辨能力。

图8 CDC输出波动Fig.8 Fluctuations of CDC output
以0.5 nA分辨率计算,电路动态范围为2 ×40 mA/0.5nA =1.6 ·108=164 dB,相当于27位模数转换器的动态范围。
由于CDC输出1 s标准差小于0.5 nA,因此在测量nA级输入电流时,CDC测量结果达到稳定值只需要几秒,相比之下I/F转换电路产生一个计数脉冲输出需要几百秒,测量结果达到稳定值所需的时间则更长,因而测量微小电流时CDC有非常大的优势。
2.4 功 耗
实测单路电流输入原理验证CDC功耗约1.5 W,根据电路各器件功耗,可推算得到3路输入CDC总功耗约2~3 W,而I/F功耗通常为6~8 W。二者功耗主要差异在于:对于3路加速度计电流输入,I/F需要6路恒流源用于电荷平衡,每路恒流源电流需大于最大输入电流,恒流源电路功耗约6 ·40mA ·15V =3.6 W。CDC反馈跟踪电流I2跟随输入电流I变化,而惯性导航系统中加速度输出电流I大部分时间为对应1g加速度的小电流(1~2 mA),其功耗相比I/F恒流源可忽略。此外I/F的电压基准部分较CDC功耗大0.5~1 W。
2.5 动态响应
惯性导航系统中角速度和加速度信号的频谱范围通常在0~100 Hz,采样频率不超过10 kHz[10]。CDC动态响应带宽和采样率只需不低于上述数值即可。
CDC动态响应与采样频率fS、电路参数、反馈控制算法有关。原理验证CDC样机采样频率fS=32kHz,反馈控制为PID算法。将输入电流I经电阻R接到积分电路,对电阻R两端电压(即输入电流I)和D/A输出电压(即输出电流I2)采集测量,二者幅度比值随频率变化曲线即为CDC幅频曲线,二者相位差随频率变化曲线即为CDC相频曲线,结果如图9(a)所示,其中相位差不包含I、I2反相的180度,幅度比值不为1是因为电阻R与V/I电路转换电阻稍有差异。由图9(a)可见,在100 Hz以下,CDC幅度基本无衰减,相移小于2 °且随频率线性变化。图9(b)为示波器采集的100 Hz频率下输入电流I和输出电流I2波形。
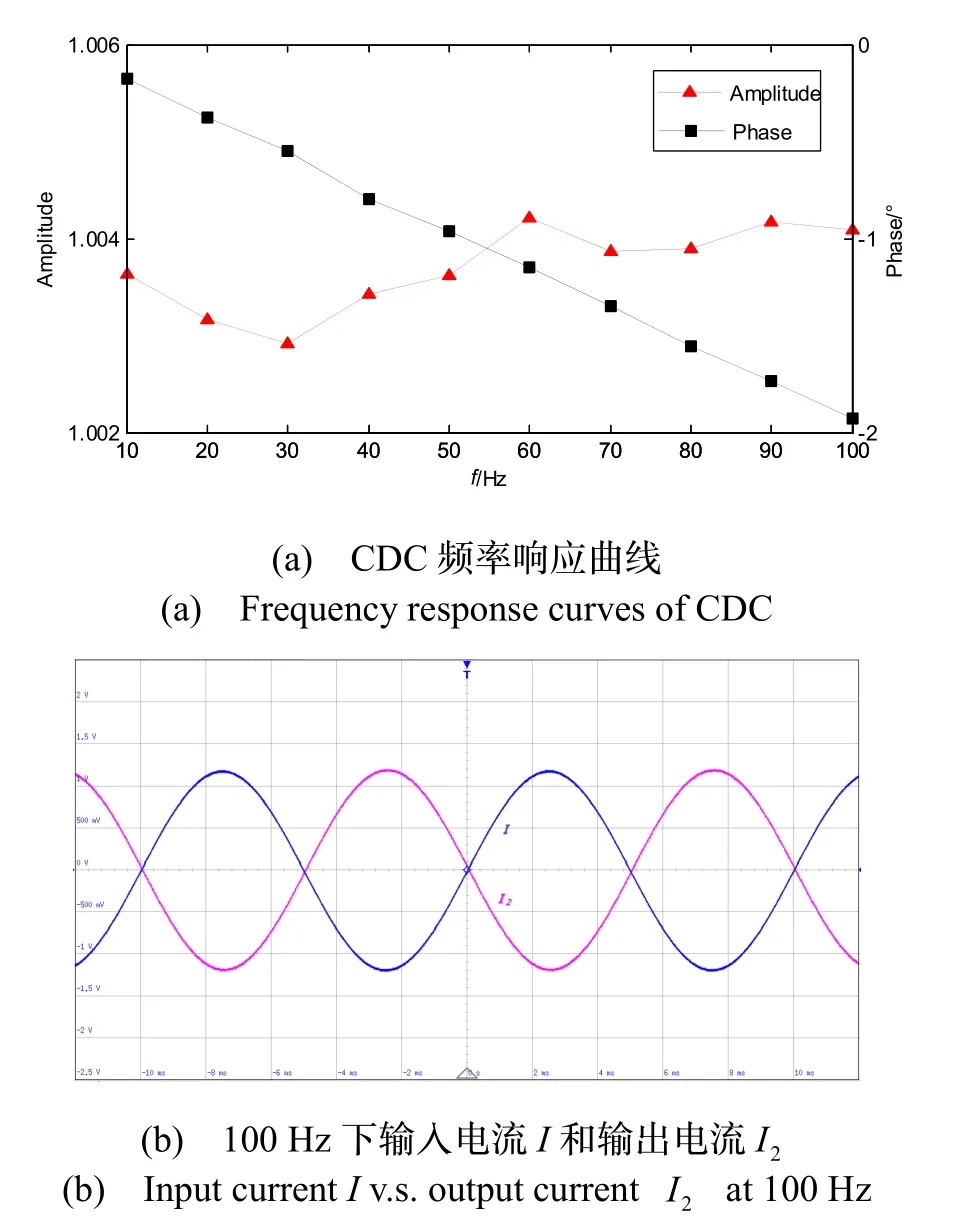
图9 CDC频率响应曲线Fig.9 Frequency response curves of CDC
当采用高速FPGA或DSP代替单片机进行处理时,CDC的采样频率以及动态响应性能可进一步提高。
常用高精度I/F电路[3,6,7]与原理验证CDC性能指标对照如表4。

表4 CDC与典型I/F性能指标Tab.4 Specifications of CDC and I/F
由表4可见,除了标度因数和零偏温度灵敏度两个指标稍差外,原理验证CDC线路其余指标均优于I/F。如前文所述,通过改进热设计和增加特征点温度传感器可减小CDC标度因数和零偏的温度漂移。此外,可以在不影响输入电流连续积分、不影响电流数字连续转换的前提下自动校正以消除零偏温度变化。
3 结论
本文提出的电荷平衡和自动跟踪型加速度计电流数字转换电路在± 40 mA电流范围内标度因数不对称性优于5 ppm,非线性优于10 ppm,电流分辨率优于0.5 nA,动态范围大于164 dB;-40℃~+60℃温度区间内零偏变化小于240 nA、标度因数变化小于60 ppm,补偿后零偏变化小于30 nA、标度因数变化小于20 ppm。各性能指标特别是温度性能还有较大改善空间,接下来的工作将重点改进电路温度性能、误差消除以及将其用于惯性导航系统。电荷平衡和自动跟踪型电流数字转换技术具有动态范围大、精度高、分辨率高、易补偿等优点,不仅可以应用在加速度计电流转换电路中,适当修改量程等参数后也可用于光功率探测、电离辐射监测等领域。
猜你喜欢
四川大学学报(自然科学版)(2022年1期)2022-02-10
飞控与探测(2021年5期)2022-01-05
空间电子技术(2021年4期)2021-11-10
小学生学习指导(中年级)(2021年3期)2021-04-06
小学生学习指导(低年级)(2020年9期)2020-11-09
导航与控制(2020年3期)2020-09-09
导航与控制(2019年4期)2019-09-25
小学生学习指导(高年级)(2018年3期)2018-11-29
小学生学习指导(中年级)(2018年9期)2018-11-29
科技经济市场(2017年5期)2017-09-16
