空间伺服扫描机构驱动控制技术研究
2022-11-10 04:30蔡华祥吴兴校
微电机 2022年10期
蔡华祥,吴兴校,陈 强,李 彬
( 1. 国家精密微特电机工程技术研究中心,贵阳 550081;2. 贵州航天林泉电机有限公司,贵阳 550081;3. 中国科学院国家空间科学院中心,北京 100190 )
0 引 言
随着航空航天领域各方面技术的快速发展,人们对空间领域的探测需求不断增加,探测的难度也在逐渐加大[1-2]。在探测任务中,常用的探测方式通常是通过卫星或者飞船搭载不同的载荷,如雷达、天线、微波辐射计、光学仪器等[3-4]。通过控制卫星上搭载的伺服扫描机构其运行的转速、角度来调节雷达、光学仪器的姿态,从而实现准确的定位及对地观测。此外,由于空间伺服扫描机构通常执行的是周期性的扫描任务,在执行过程中,要求严格控制每个周期的扫描时间、扫描转速等。因此,在实现高质量的探测任务时,需要保证高响应、高精度、高稳定的驱动控制性能[5-6]。
本文针对空间机构变速扫描任务的需求,开展了扫描机构驱动控制系统的硬件设计、软件设计。同时针对机构不同的扫描方式,研究了系统路径规划算法。通过实验测试发现,系统速度控制精度在1%以内,定位精度在0.02度以内,整个扫描周期控制误差在3 ms左右,表明所设计的系统及算法能够满足空间扫描任务对伺服驱动机构的要求。
1 伺服扫描机构组成及功能需求
1.1 扫描机构组成
整个扫描机构由三大部分组成包含:伺服驱动器、执行机构和扫描负载。如图1所示,各部分功能描述如下。

图1 扫描机构
扫描负载是一个接收镜,其主要功能是完成黑体定标、冷空定标和对地观测。
执行机构由一个低转矩波动的永磁同步电机,和两台高精度的雷尼绍光栅尺组成。两个光栅尺的分辨率最高可以到32位,以互成180°的位置差安装。伺服扫描机构工作时,以其中一台光栅尺作为位置传感器,另外一台传感器作为备份。当其中一路传感器出现问题时,切换另外一路传感器作为位置传感器。
伺服驱动器以主控DSP2812为核心处理器,搭载双光栅尺信号解码电路、串口通信电路、信号采样电路、驱动电路以及功率逆变电路等。
1.2 功能需求
根据扫描机构需要完成的任务,伺服系统需要具备三个功能:高精度定位工作模式,匀速工作模式和变速扫描工作模式。
高精度定位工作模式:系统根据给定的指令,定位到所给的位置角度,且定位精度要求在0.02°以内。
匀速工作模式:伺服机构以66°/s的速度作匀速扫描,转速控制精度在1°/s以内。
变速扫描工作模式:机构以2°为转动起始位置,逆时针转动,整个扫描周期2.8 s。有效观测区间有两个。(1)黑体定标:358°~2°,角度区间4°,匀速扫描,观测时间0.2 s;(2)冷空定标和对地观测:106°~238°,角度区间132°,匀速扫描,观测时间2 s;其余角度区间都是数据无效观测区间。伺服机构做周期性变速扫描,每个扫描周期误差小于±5 ms。
2 伺服扫描机构控制原理
扫描机构需要完成角度定位、匀速扫描、周期性变速扫描三种工作模式,因此伺服系统控制结构采用常规的三环控制结构。内环为电流环,实现电流和转矩的快速响应控制控制。中间环为速度环,实现机构速度的快速稳定控制。外环为位置环,实现角度的精准定位[7]。控制结构框图如图2所示。
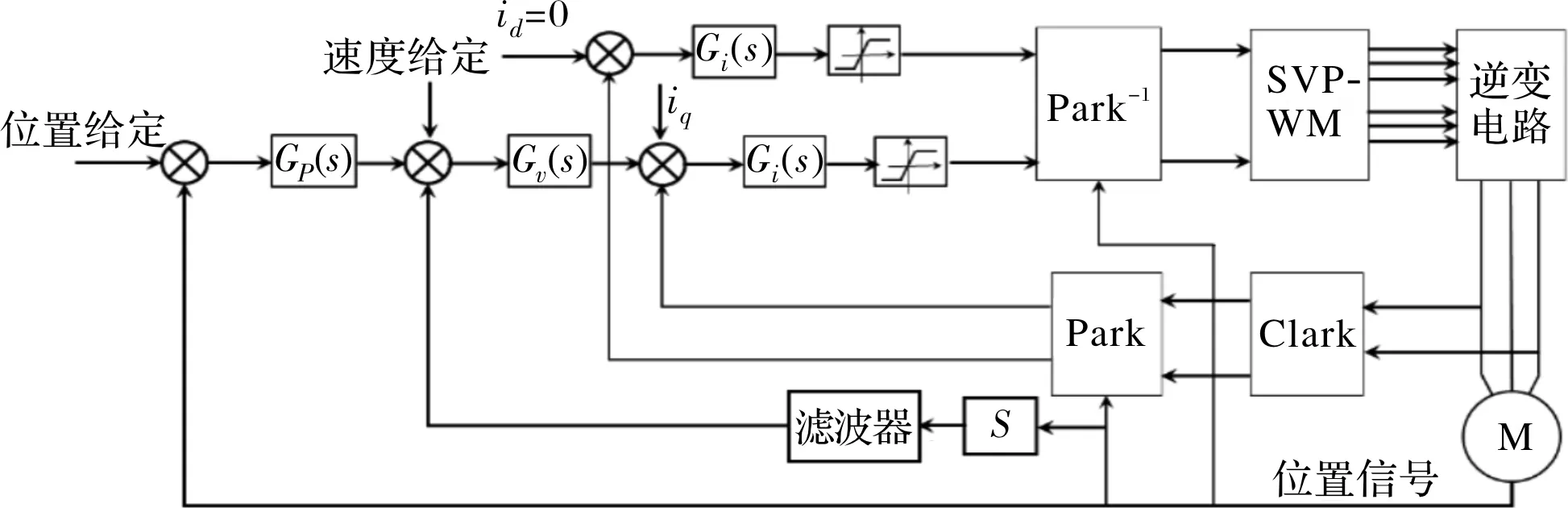
图2 控制结构框图
图中,Gi(s)、Gv(s)、Gp(s)分别为电流环、速度环和位置环的控制器。位置给定和速度给定分别为系统给定,根据不同的工作模式来选择执行给定速度还是给定位置。位置反馈信号选用32位的雷尼绍光栅尺来获取,速度信号根据得到的位置信号,通过差分的方式来得到。电流反馈信号通过电流传感器采集得到。
永磁同步电机采用空间矢量控制方式,由于所设计的电机为表贴式永磁同步电机,其两相旋转坐标系下电磁学方程为
(1)
其中,ud,uq分别为dq坐标下的q轴、d轴电枢电压分量;iq,id分别为dq坐标下的q轴、d轴电枢电流;Rs为电枢绕组电阻;ψq,ψd分别为dq坐标下定子磁链分量;φ是转子磁钢在定子绕组上的耦合磁链;Ld,Lq分别为dq坐标下的q轴、d轴等效电枢电感分量[8]。
同步电机运动学方程如式(2)所示。
(2)
表贴式同步电机中,Lq≈Ld,进而有如下关系:
(3)
因此,对于表贴式同步电机而言,通常采用id=0的控制方式。通过控制直轴电流iq就可以间接地控制同步电机电磁转矩,进而控制同步电机的转速和位置。
3 软件设计
3.1 反馈信号获取
伺服控制器三闭环控制需要四个反馈信号:q轴电流信号、d轴电流信号、速度信号和位置信号。其中q轴电流和d轴电流是由相电流经过park变换和clark变换而来。相电流通过电流传感器实时采样获取。
速度信号则利用位置传感器通过M测速法来获取。通过测试固定时间t内的位置脉冲个数ΔM,计算ΔM/t来得到实时的速度信号。由于速度信号的获取还是需要通过位置信号转换得到。因此,在该扫描机构中,位置信号的获取至关重要。
在硬件设计方面,电流信号通过电流传感器检测后变为模拟信号,利用主控芯片DSP的AD采样口实时采集。位置信号则需要根据位置传感器的信号类型设计相应的处理电路。如图所示,由于所选用的位置传感器为雷尼绍的绝对式光栅尺。该传感器的信号输出为BISS-C协议的数据。该协议通信方式需要主控给定时钟信号,时钟频率范围从100 kHz到10 MHz,然后可以从传感器的SLO口获取含有位置信息的数据包。针对BISS-C协议的数据,通常的解析方式有两种,一种是通过专用的IC芯片来解析,另一种是通过FPGA芯片,按照相应协议来解析。两种方式都可以,但限制了整个伺服驱动器的开发。对于电机控制而言,采用专用的控制芯片,有利于控制算法的实现。因此,在大多数类似伺服控制系统,通常会采用DSP加FPGA的双核控制芯片。这样无疑增加系统的体积和成本,同时降低了系统的可靠性。
本文中,考虑到位置传感器的BISS协议与DSP的SPI通信口类似。同时SPI通信的时钟频率最高可到36 MHz,完全能够完全覆盖位置传感器通信时钟的要求。因此,采用DSP2812作为该伺服扫描机构的主控芯片,同时利用2812的SPI口实现位置信号的解析,硬件连接示意图如图3所示。
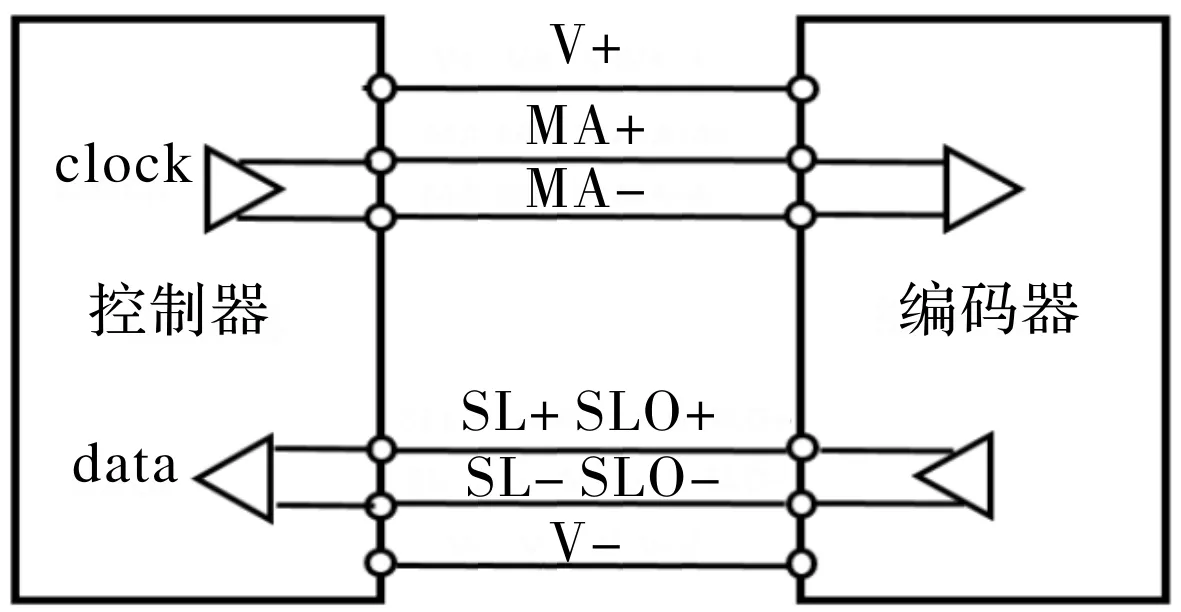
图3 编码器硬件连接图
首先初始化DSP并进行SPI模块设置,设置SPI的FIFO发送延时为0,使能SPI模块的发送FIFO与接收FIFO功能。向SPI的发送FIFO连续放入M个16位长度的数据,用来产生连续的M*16个周期的时钟信号,并作为传感器的时钟输入。BISS-C协议在Ack段的最后一个位与起始位和零位组成了二进制数3’b010,对读取的数据从第一位向最后一位顺序进行对比查找,如图4所示。数据解析完后,若错误位、报警位、位置校验与温度校验无误,则截取位置信号与温度信号通过换算公式,得出当前转台的实际位置与传感器温度。输出处理流程如图5所示。

图4 编码器读写时序
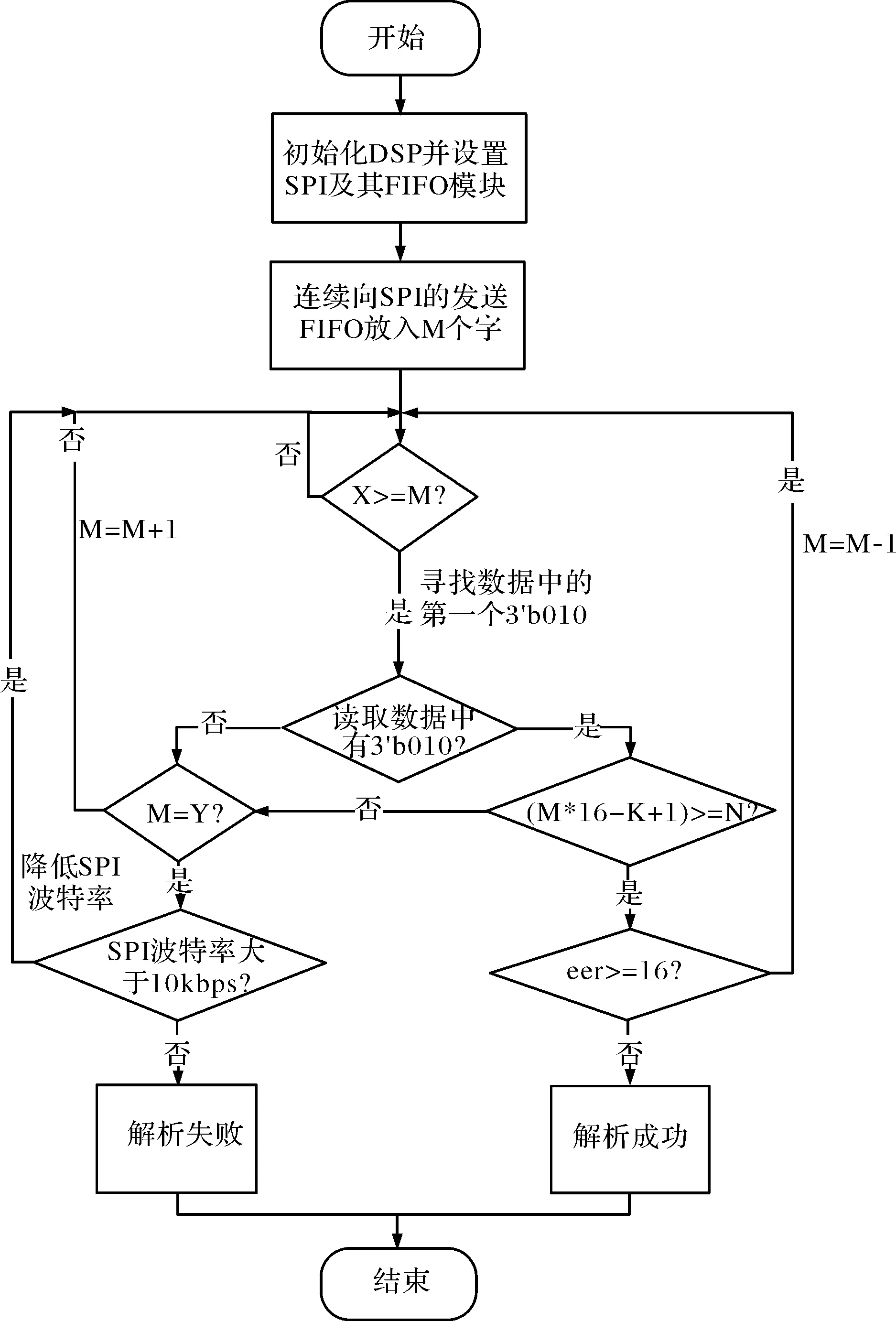
图5 程序流程
3.2 路径规划
根据系统需求,可以知道,对于整个扫描机构,需要确保两个匀速段区间的速度稳定。一是358°到2°的角度区间,这段区间要求速度为20°/s;二是106°到238°的角度区间,这段区间要求的速度是66°/s。因此,对于整个扫描机构,需要规划2°到106°,以及238°到358°这两段区间的速度曲线。此外,考虑到过大的加速度对系统机构存在较大的冲击振动影响,加速度或者减速度应该尽可能小。机构运行时间要求严格控制在2.8 ms以内,对于该机构的速度路径规划如下:
在2°到54.9°的区间内,以加速度为5426°/s2的速度加速运行;
在54.9°到106°的区间内,以减速度为5661°/s2的速度减速运行;
在106°到238°的区间内,以66°/s的速度匀速运行;
在238°到295.7°的区间内,以加速度为4943°/s2的速度加速运行;
在295.7°到358°的区间内,以减速度为4613°/s2的速度减速运行;
在358°到2°的区间内,以20°/s的速度匀速运行。
具体速度随时间的规划路径如式(4)所示。
根据速度随时间的路径规划可以拟合出位置随时间的规划路径如式(5)所示。
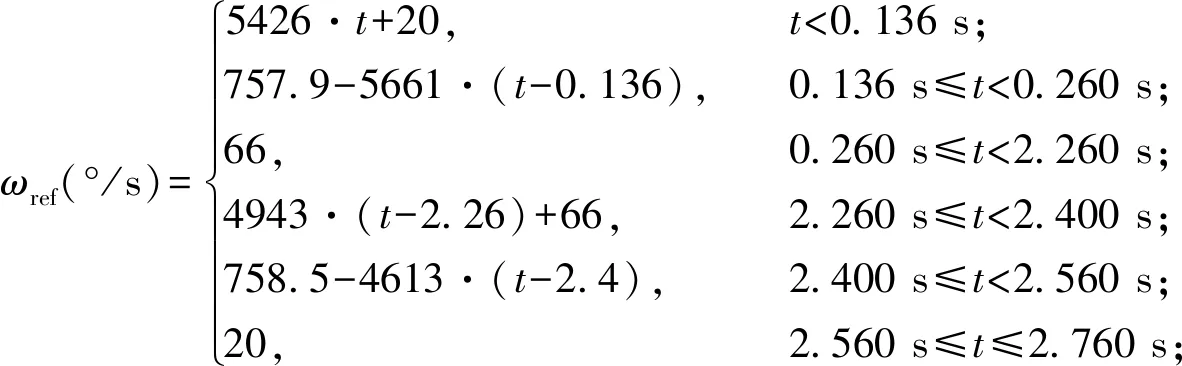
(4)
(5)
机构的起始角度为2°的位置,经过一个周期后又回到2°的位置结束。因此,在位置的路径规划过程中,最后一段时间区间内,所计算的位置大于360°时,应该减去360°。所规划的位置和速度如图6所示。
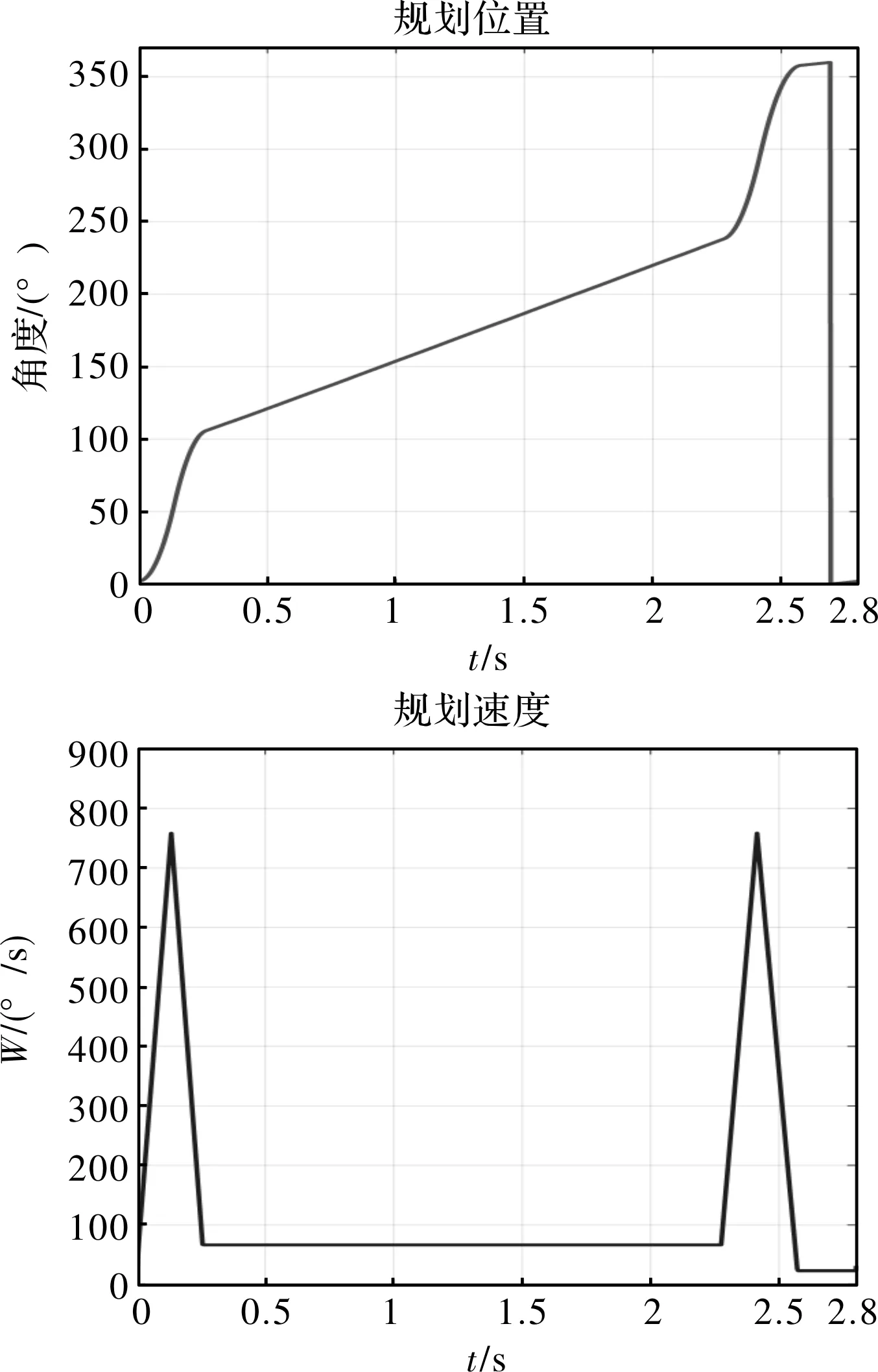
图6 规划位置和速度曲线
3.3 控制器设计
电流环控制器同样采样的是积分限幅PI控制器,尽管电流环是两个控制回路id和iq,但两环可以采样相同的控制器,控制器结构如下:
(6)
速度环和位置环采用的控制算法为带积分限幅的PI控制器和输出限幅比例控制器。
积分限幅PI控制器:
(7)
比例控制器:
Gp(s)=Kpe(t)
(8)
4 实验测试
4.1 转速精度测试
本次转速精度测试根据变速扫描模式、匀速模式选取了三个速度进行测试,分别是20°/s,66°/s,120°/s。卫星转台以120°/s匀速运行的速度及位置曲线如图7所示,速度均方根为119.434°/s,误差为0.57°/s;卫星转台以66°/s匀速运行的速度及位置曲线如图8所示,速度均方根为65.62°/s,误差为0.48°/s。卫星转台以20°/s匀速运行的速度及位置曲线如图9所示,速度均方根为19.192°/s,误差为0.81°/s。
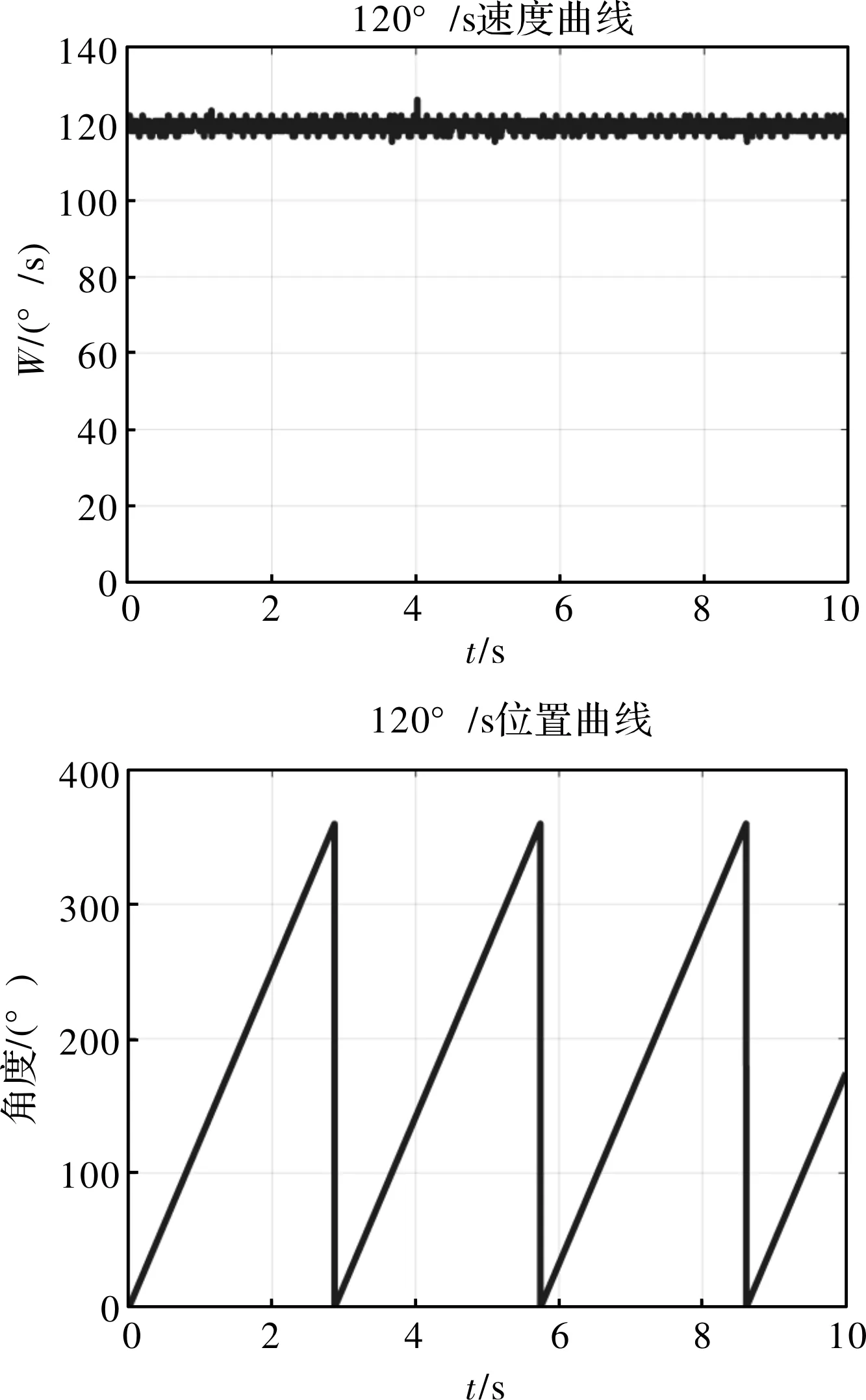
图7 120 °/s速度和位置曲线

图8 60 °/s速度和位置曲线

图9 20 °/s速度和位置曲线
转速精度实验结果如表1所示。

表1 速度精度试验结果
从表1可以看出,三个速度测试结果中,120°/s和66°/s下转速精度能够满足任务书指标要求。20°/s下的转速精度稍差,主要原因在于,此时电机的转速约为3.3 r/min,而电机的转速要求为0~100 r/min。电机在设计时,额定转速应按100 r/min的速度设计。3.3 r/min对应为额定转速百分之十以内,此时电机端的控制电压同样约为额定电压下的百分之十以内,而电机的齿槽转矩是固有存在的。因此在极低速时,齿槽转矩导致的转矩波动将会比较明显。故通常情况下,转速精度应只针对额定转速下的转速精度。
4.2 定位精度测试
伺服机构位置角度采用的是32位的传感器,由于数据传输线路较长,且为了保证10 k的位置采样,传感器的波特率为1.5 Mbps,所以导致数据干扰较大,根据读取位置信号的跳动情况,有效位仅为18位。所以程序选用18位精度的数据,角度测试精度可达0.00137°。
通过上位机发送给定位置指令,分别给定驱动器发送0°、90°、180°和270°四个位置指令,通过读取编码器的位置值,可以看出各个位置点下的位置误差。表2是随机几个点的定位测试结果。从表中可以看出,四个位置点最大的位置误差为0.02°,严格在任务书要求的0.02°以内。

表2 定位精度试验结果
4.3 变速扫描模式测试
(1)变速扫描运动规划
①从起始位置2°开始扫描,2°-106°,角度区间104°,为无效数据区间,运动模式为变速扫描,时间为0.26 s;②106°-238°,角度区间132°,此区间为冷空定标和对地观测有效区间,运动模式为匀速扫描,观测时间2 s;③238°-358°,角度区间120°,为无效数据区间,运动模式为变速扫描,时间为0.3 s;④358°-2°,角度区间4°,时间0.2 s,此区间为有效观测区间,运动模式为匀速扫描,用于黑体定标;
接下来再从①-④循环往复扫描观测。
(2)变速扫描运动测试结果
卫星转台变速扫描模式一个转动周期的规划速度曲线和实际速度曲线如图10所示。从图中可以看到转台实际运行的速度曲线与给定的拟合速度曲线基本一致。
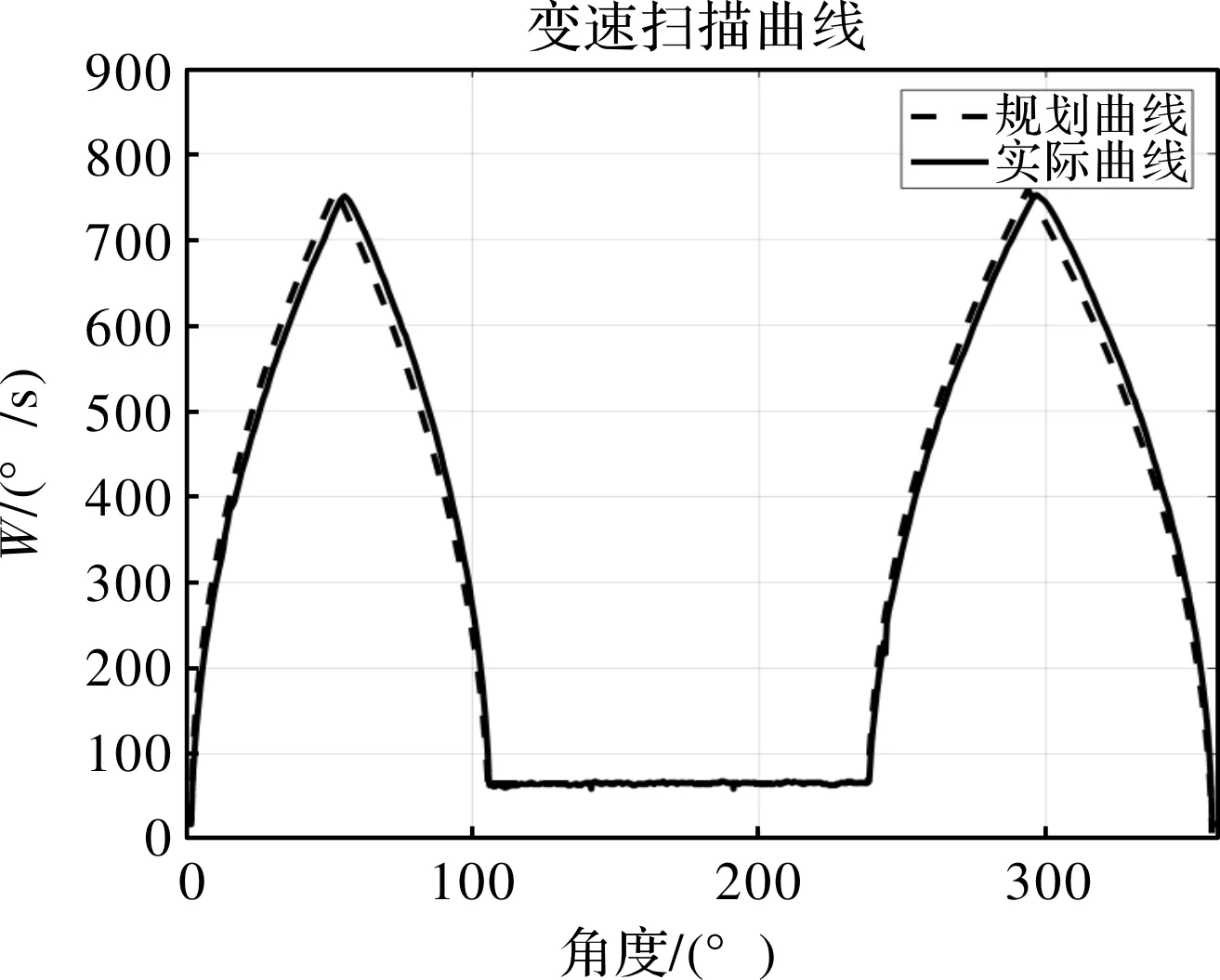
图10 变速扫描模式一个转动周期的速度曲线
图11为一个完整的扫描周期下,实际速度运行曲线与转台实际位置的运动情况。考虑到加速度过大时,转台受到的机械冲击较大,从而影响系统的寿命。因此,减小了转台运行过程中的加速度,将整个扫描周期适当延长了0.04 s,整个扫描周期为2.800 s。从图中可以看到,转台要求匀速扫描的区间基本与任务书要求的一致。在106°到238°区间范围内,以66°/s的速度匀速运行。在358°到2°的区间范围内,以20°/s的速度匀速运行。其余两个位置区间做变速运动扫描。
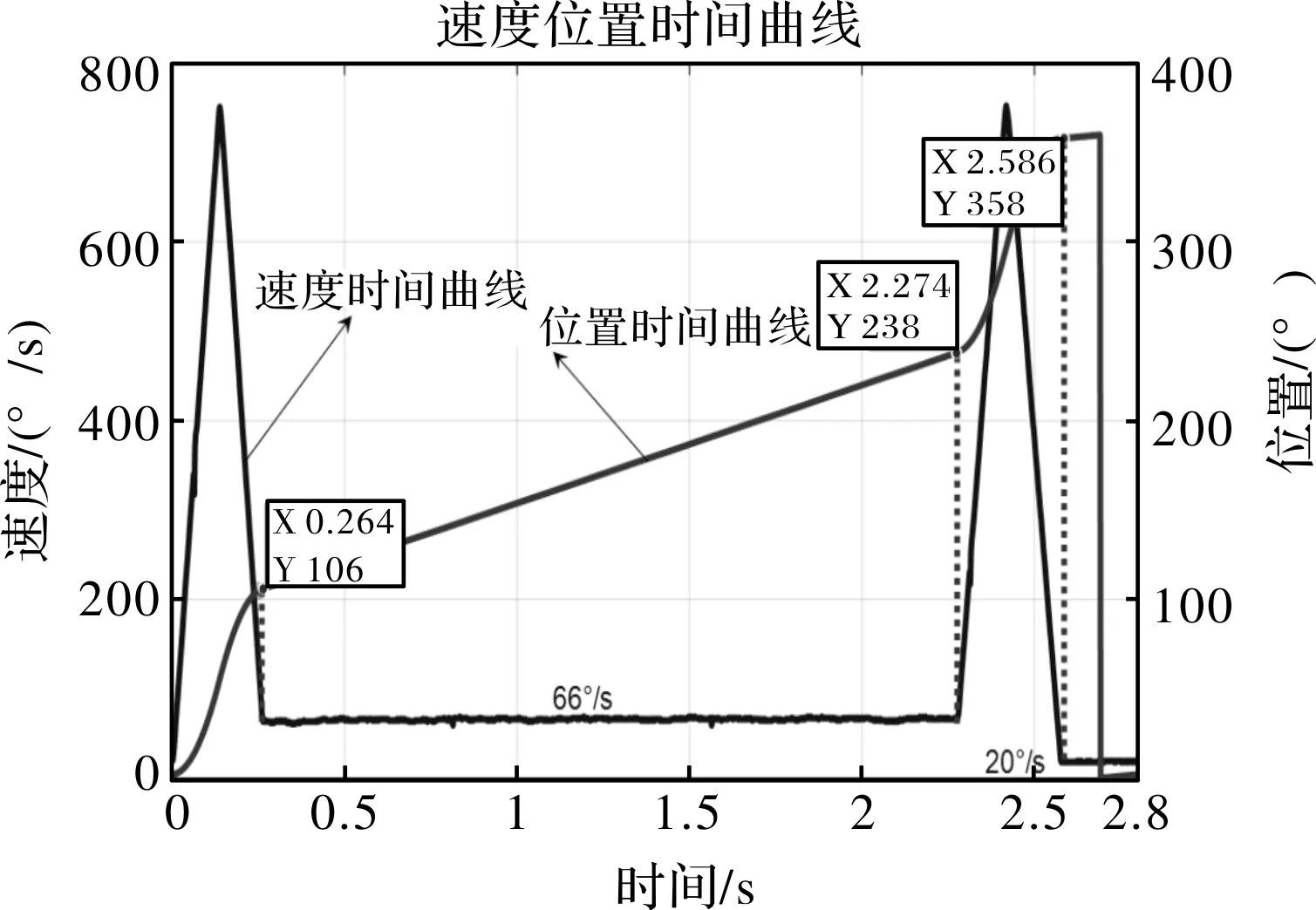
图11 实际运行速度位置时间曲线
变速扫描模式下每周运行的时间曲线如图12所示,单位为ms,平均用时为2.795 s。经过连续30个周期的连续运行后,统计了30个周期内每周期所运行的时间,运行周期最长的时间为2.7968 s,用时最短的周期为2.7935,从而在30个周期内每周运行的时间误差最大为3.3 ms。
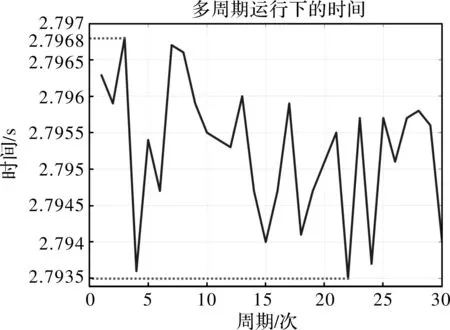
图12 变速扫描模式下每周运行的时间曲线
5 结 论
本文针对扫描机构系统的需求,开展了控制系统的硬件设计、软件设计以及算法设计。首先提出了一种基于DSP芯片的BISS协议解码的系统方案,从而将编码器输出的BISS协议码与电机的控制算法共同集中到一块MCU处理。相比传统采用FPGA或者专用解码芯片的方式,降低了系统的体积和成本。其次,根据扫描机构不同的扫描方式,研究了系统速度和位置路径规划算法。并将其用于系统试验验证,通过试验测试发现,系统速度控制精度在1%以内,定位精度在0.02°以内,整个扫描周期控制误差在3 ms左右,表明所设计的系统及算法能够满足空间扫描任务对伺服驱动机构的要求。
猜你喜欢
作文小学高年级(2022年3期)2022-04-20
煤气与热力(2021年12期)2022-01-19
延安大学学报(自然科学版)(2021年4期)2022-01-11
电子制作(2019年13期)2020-01-14
中国外汇(2019年13期)2019-10-10
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
筑路机械与施工机械化(2014年4期)2014-03-01