
海上风电柔性直流输电系统新型电压-频率控制策略
2022-11-09 01:26刘淑军郭铸黄伟煌王琦韩雷岩冯俊杰蔡东晓彭发喜
广东电力 2022年10期
刘淑军,郭铸,黄伟煌,王琦,韩雷岩,冯俊杰,蔡东晓,彭发喜
(1. 中国三峡新能源(集团)股份有限公司,北京101100;2. 直流输电技术国家重点实验室(南方电网科学研究院有限责任公司),广东 广州 510663);3. 中国三峡建工(集团)有限公司,四川 成都 610095)
随着我国碳达峰与碳中和战略的推进,大规模海上风电作为清洁能源近年来得到大力规划与开发。目前海上风电并网技术主要分为2类:80 km内近海区域的风电场主要采取交流输电技术进行并网;远海风电场主要采取柔性直流(以下简称“柔直”)输电技术进行并网[1]。柔直输电技术具备黑启动能力,可为风电场提供稳定的交流电压,且能够隔离陆上电网交流系统故障的影响,对于远海风电场是一种主流的技术方案。
国外海上风电柔直送出技术起步较早。德国北海已投运了多个海上远距离柔直输电项目,其中,DolWin1是世界上第一个电压等级达到320 kV的海上风电柔直输电工程项目,DolWin5是世界上第一个采取66 kV风电场直接接入海上换流站的海上风电柔直送出工程。66 kV风电场直接接入海上换流站方案因取消了海上升压站,极大地降低了工程建设和维护成本,在国外得到大力发展。
我国的海上风电柔直技术起步较晚。2021年,国内首个海上风电工程——如东海上风电柔直输电示范项目投产,该工程直流电压等级±400 kV,容量为1 100 MW,海上风电机组通过220 kV升压站汇集后接入海上换流站。目前国内规划建设的海上风电工程中也有采取66 kV风电场直接接入海上换流站方案[2-5]。
现有文献主要针对典型接线方式下,海上风电柔直送出工程交流故障穿越、高频谐振、过电压抑制、风电场与柔直协调控制等方面开展研究[6-9],对适用于66 kV风电场直接接入海上换流站的不同运行方式的控制策略研究较少。对于海上风电柔直送出系统,海上柔直换流站比较成熟的控制策略是以网侧电压作为控制目标的电压-频率(U-f)控制,分别控制海上交流电压和频率的稳定,交流电压用于电压外环控制以及电流内环的前馈环节[10-11]。66 kV风电场直接接入海上换流站系统,因电压等级低,当风电场容量足够大时其短路电流会过大,甚至超过66 kV开关短路电流分断能力;因此当风电场投入较多时,需安排66 kV母线不合环运行方式来降低系统的短路电流。若海上换流站仍采取以单一支路网侧电压作为控制目标的U-f控制,当单母线退出运行时存在复杂的交流电压控制点切换,且不能对整个系统的交流电压和阀侧电流进行有效控制。现有比较成熟的策略将不再适用于66 kV风电场直接接入的海上换流站系统。为此,本文提出一种以阀侧电压作为控制目标的新型海上换流站U-f控制方法,并从高频谐振风险、静态性能以及动态性能等方面开展可行性评估。
1 66 kV风电场直接接入海上换流站系统


图1 66 kV风电场直接接入海上换流站的典型接线方式
2 海上换流站控制策略
海上风电柔直送出系统比较成熟的控制策略为陆上换流站控制直流电压和无功功率,海上换流站采取以网侧电压为控制目标的U-f控制,将网侧作为交直流功率转换的分界点。对于66 kV风电场直接接入海上换流站系统,分别采取网侧电压和阀侧电压作为控制目标的对比见表1。

表1 海上换流站网侧电压和阀侧电压控制对比
对于采取网侧电压作为控制目标的控制策略,典型的控制器结构为正负序电压、电流双环控制,外环采取交流电压控制,内环采取阀侧电流控制,控制框图如图2所示。图2中:U、I分别为交流侧电压、电流,其中下标d、q分别表示d、q轴分量,下标A、B、C分别表示A、B、C三相,下标P、N分别表示正序、负序分量,上标“*”表示双环控制中间变量参考值,上标“ref”表示双环控制最终输出结果作为阀控调制的参考值;Gd为系统调制与链路延时传递函数;Gfv为电压前馈低通滤波器传递函数;ω1为基波角频率;Kd为电流内环解耦系数。交流电压在整个控制器起到核心作用,网侧三相交流电压经过abc/dq变换分解成d、q轴分量后参与控制,一个作为交流电压外环控制的实测量,另一个作为阀侧电流内环控制的前馈量。若将控制目标换成阀侧电压,控制架构会有较大的变化,需开展全面的可行性评估。

图2 以网侧电压为控制目标的换流器控制框图

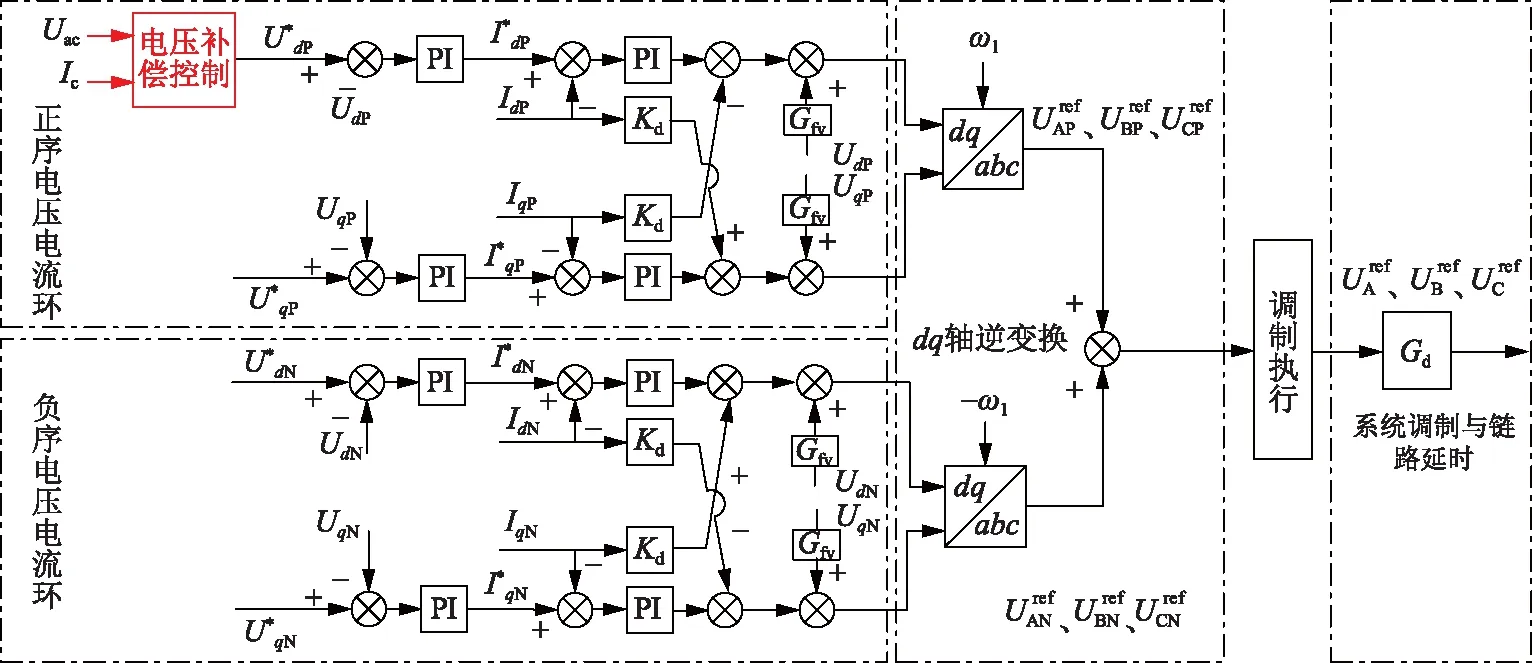
图3 以阀侧电压为控制目标的换流器控制框图

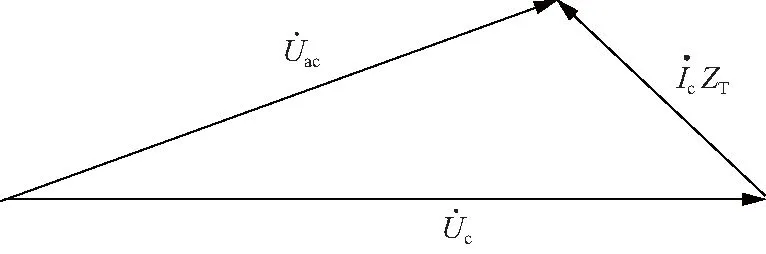
图4 网侧电压和阀侧电压相量关系

(1)
当网侧电压幅值等于额定值UacN时,由式(1)推导可得
(2)
式中:Ucref为阀侧电压幅值参考值;Ucref、Ic、ZT均为标幺值。可以看到:若柔直给交流系统提供无功功率,则φ>0,此时sinφ为正,Ucref增大,抬升网侧电压;若交流系统给柔直提供无功功率,则φ<0,此时sinφ为负,Ucref减小,降低网侧电压。
以阀侧电压为控制目标时,可以将阀侧PCC作为交直流功率转换点,将换流器当成海上风电场的升压变压器。当66 kV母线不合环运行时,可以理解为不同风电场经过升压变压器后各自接入海上换流站的阀侧PCC。
3 高频谐振风险评估
高频谐振风险评估通常的手段是对风电场和柔直换流器进行阻抗建模与波特图分析[12-16],本文重点对比传统控制方法和新型控制方法下的阻抗结果。根据图2和图3的控制框图,采用谐波线性化的方法推导换流器阻抗,得到控制网侧电压情况下海上换流器阻抗
(3)
控制阀侧电压情况下,由于电压补偿环节控制量为电压幅值,计算速度慢,忽略补偿环节引入的扰动项,得到控制阀侧电压情况下海上换流器阻抗
(4)
式(3)、(4)中:上标“+”“-”表示不同的频率偏移,即G+=G(s-jω1),G-=G(s+jω1),s为拉普拉斯算子;Larm为桥臂电抗器电感;LT为换流器电感;Gsv、Gsi分别为电压、电流采样环节传递函数;Gsd为1/4工频周期延时滤波环节传递函数;Gi为电流内环PI控制器传递函数;GAC为交流电压外环PI控制器传递函数。
针对这2种控制方式,分别扫描海上换流器交流阻抗,换流器控制系统链路延时为200 μs,控制器采用典型参数,扫描结果如图5所示。在控制网侧电压方式下,海上换流器阻抗在中高频段(2 500~4 300 Hz)存在负阻尼;控制阀侧电压方式下,换流器阻抗有一定的改善,主要原因是控制阀侧电压时,扰动项sLT从分子项提取到外部,对换流器阻抗起到隔离作用,对中高频段阻尼有一定的抑制效果。同时,本文所提控制方式的阻抗在3 600~4 100 Hz频段的相角降低至90°以下,降低了高频谐振风险。

图5 2种控制方式下的换流器阻抗对比
4 阀侧电压控制动、静态性能评估
建立包含详细控制策略的66 kV风电场直接接入海上柔直换流站电磁暂态仿真模型,开展海上换流站关键工况仿真计算,评估新型U-f控制下柔直系统的动、静态性能,以及对比66 kV母线不合环运行方式下2种控制策略的控制效果。仿真工况包括黑启动、风电场功率升降、海上换流站交流故障穿越。仿真中海上换流站的基本主回路参数见表2。

表2 海上换流站基本主回路参数
4.1 送端黑启动
黑启动功能是海上风电柔直系统较为关键的功能,其基本原理为:利用柔直可双向供电的能力,启动过程中,陆上换流站先解锁建立起稳定的直流电压,通过直流海缆给海上换流站进行直流侧充电,海上换流站通过U-f控制模式,在交流侧建立起稳定的交流电压和频率。图6为海上换流站采取新型U-f控制策略下的黑启动工况仿真结果,启动过程中交流电压在200 ms内从0升至额定值。可以看出,整个黑启动过程电压波形较为平衡,网侧电压有效值稳定在65.86 kV,符合系统设计要求。

图6 黑启动工况仿真结果
4.2 风电场功率升降
由于送端柔直换流站不控制功率,当风电场功率变化时,柔直系统的有功功率和无功功率也会动态变化,进而导致在换流器上的压降发生变化,此时需要进行电压补偿才能将网侧电压维持在额定范围。图7为风电场功率上升工况仿真结果,风电机组功率从0升至2 000 MW,无功功率从280 Mvar降至146 Mvar。通过本文所提电压补偿方法,将阀侧电压参考值从502 kV调整至506 kV,网侧电压由66.5 kV变化至66.2 kV,稳定在66 kV左右,网侧电压控制精度在1%以内。同时,该电压补偿环节也抑制了交流系统流向柔直换流器的无功功率。

图7 功率上升工况仿真结果
4.3 海上换流站交流故障穿越
海上换流站交流系统故障对于海上换流站控制器的动态性能来说是最严苛的工况,交流故障穿越策略也一直是海上风电柔直系统的研究热点与难点,主要集中在短路电流限制和过电压限制方面[17-20]。考虑直流功率为2 000 MW,分别开展交流系统单相不对称故障和三相对称故障工况仿真,故障持续时间100 ms。仿真中,66 kV母线按合环运行方式考虑。
单相交流故障工况仿真结果如图8所示,桥臂电流最大值为2.86 kA,功率恢复至故障前90%的时间为145 ms,故障期间交流网侧电压最大峰值为66 kV(标幺值1.23)。

图8 2 000 MW单相交流故障工况仿真结果
三相交流故障工况仿真结果如图9所示,桥臂电流最大值为2.48 kA,功率恢复至故障前90%的时间为160 ms,故障恢复过程中交流网侧电压最大峰值为71.8 kV(标幺值1.33)。

图9 2 000 MW三相交流故障工况仿真结果
由图8、9可以看到,故障穿越过程中,采用以阀侧电压为控制目标的新型U-f控制策略,桥臂电流与交流暂态过压得到有效的控制,可以实现无闭锁故障穿越,故障恢复时间在200 ms以内,满足系统需求。
4.4 66 kV母线不合环运行方式对比
以海上交流故障穿越工况为例,在66 kV母线不合环运行方式下,对比以网侧电压和阀侧电压作为控制目标的2种控制策略效果。仿真工况为66 kV母线母联断路器QF1、QF2断开,风电场1有功功率为62.5 MW,风电场2有功功率为625 MW,风电场3有功功率为625 MW。风电场1接入的66 kV母线发生A相金属性故障,故障持续时间100 ms。仿真中,2种控制策略的控制器参数一致,交流故障穿越策略一致。
以风电场1的网侧电压为控制目标的仿真结果如图10所示,风电场1的交流电压最大值为84.8 kV,桥臂电流最大值为2.46 kA。以阀侧电压为控制目标的仿真结果如图11所示,风电场1的交流电压最大值75.2 kV,桥臂电流最大值2.36 kA。
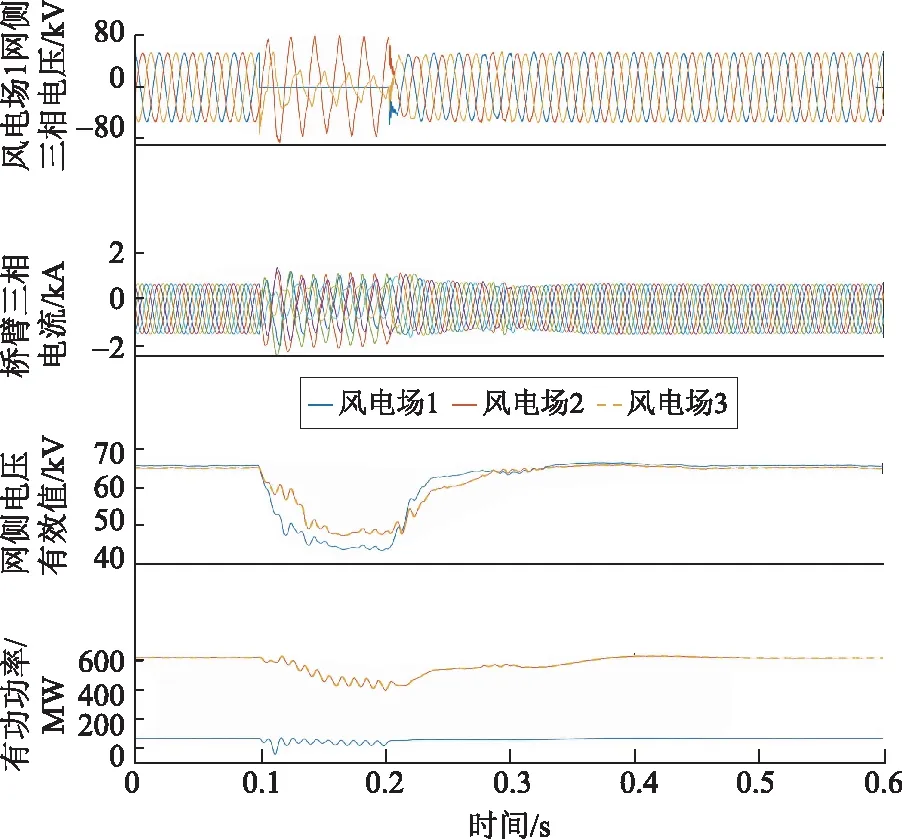
图10 网侧电压控制下风电场1交流系统单相故障工况仿真结果

图11 阀侧电压控制下风电场1交流系统单相故障工况仿真结果
从图10、11对比结果可知,采取本文所提策略能够在不合环运行方式下更好地限制交流过电压和桥臂电流。主要原因是海上换流站采取电压、电流双环控制,交流电压外环控制器的效果受阀侧电流内环影响,不合环运行方式下,阀侧电流不仅来源于故障的风电场1,还受风电场2和风电场3的影响;因此,对于采取单一支路网侧电压作为控制目标的策略,交流电压外环难以取得预期效果,阀侧电流控制也无法实现电流的预期控制,进而影响桥臂电流大小。而以阀侧电压为控制目标时,柔直控制器只需基于公共的阀侧电压,确保阀侧电压的稳定以及桥臂电流不越限。另外,从图11的结果也可以看到,3个风电场响应略有差别:风电场1的交流电压跌落较大,风电场2和风电场3因66 kV段不合环,故障交流电压跌落相对较浅,整个系统功率恢复时间约150 ms。采用本文所提控制策略,能够适应不合环运行方式下系统稳态运行和交流故障穿越的控制需求。
综上,以阀侧电压作为控制目标的新型U-f控制策略,其动、静态仿真结果满足设计要求,能适应于66 kV母线不合环运行方式。
5 结论
本文针对66 kV风电场直接接入海上柔直换流站系统,提出一种以阀侧电压为控制目标的海上换流站新型U-f控制方法,并仿真验证了所提方法的可行性。主要成果和结论如下:
a)为使网侧电压维持在设计范围,提出一种将网侧电压补偿精度控制在1%以内的电压补偿方法。
b)开展了高频谐振风险评估,对比了以网侧电压和阀控电压为控制目标下的换流器阻抗,以阀侧电压为控制目标时,对中高频段(2 500~4 300 Hz)阻尼有一定的抑制效果。
c)开展了柔直系统动、静态性能评估,对柔直系统黑启动、功率升降、海上侧交流故障穿越等关键工况进行仿真计算,对比了66 kV母线不合环运行方式下2种控制策略的控制效果。结果表明本文所提策略能够适应66 kV母线不同运行方式,且能实现整个系统交流电压和阀侧电流的有效控制,动、静态性能满足设计需求。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电工技术学报(2022年19期)2022-10-14
现代电子技术(2022年1期)2022-01-25
南方能源建设(2021年4期)2021-12-27
电子乐园·中旬刊(2021年1期)2021-09-10
电子制作(2019年22期)2020-01-14
电子技术与软件工程(2019年17期)2019-10-09
电子制作(2019年11期)2019-07-04
家庭科学·新健康(2018年10期)2018-12-15
科技与创新(2016年17期)2016-11-04
