
基于三维激光扫描的风电机组塔筒倾斜及结构形变检测应用
2022-11-09 01:20范长俊刘伟诚
广东电力 2022年10期
范长俊,刘伟诚
(1. 南方电网广东中山供电局,广东 中山 528401;2. 广东天信电力工程检测有限公司,广东 广州 510663)
随着国家碳达峰和碳中和战略的推进实施,风电投资建设发展迅猛,正逐步承担起电网主力电源的职能。风电机组(以下简称“风机”)发展到5.5 MW、8 MW、10 MW、12 MW等大容量机型,其塔筒越来越高,直径越来越大。
风机塔筒为高耸结构,长细比大,需要承受动静荷载的相互作用(除塔筒、发电机组及叶片自身重量构成的静荷载外,还有横风作用产生的不规则水平荷载,及发电机组运行传动形成的动荷载)。在动静荷载的长期作用下,风机在运行过程中会出现基础不均匀变形、塔筒倾斜以及塔筒结构形变,从而导致其结构失衡[1]。后果轻则影响发电机组的正常工作,重则出现倒塔、叶片开裂脱落和断裂、传动系统失效等重大灾难性事故发生。
当前对风机塔筒基础形变的常规监测方法包括:利用水准仪定期观测基础不均匀沉降、用全站仪测量塔筒倾斜[2-3],以及传感器在线实时监测[4-8]等。其中:通过水准仪对风机基础沉降的观测来推算风机塔筒倾斜,往往会成倍放大倾斜结果[9];全站仪的倾斜观测过程复杂,对场地要求高,且从个别测点推算塔筒中心的数据精度难以满足要求;在线传感监测实施成本较高。
近年来,三维激光全数字扫描技术为实现风机塔筒结构的高密度、高精度表面数字建模提供了新的技术手段[10-20]。三维激光扫描技术又被称为实景复制技术,是测绘领域继GPS技术之后的又一次技术革命。它通过高速激光扫描测量的方法,可大面积、高分辨率地快速获取被测物体表面各个点的三维坐标、反射率、颜色等信息,从而快速复建出1∶1的真彩色三维点云模型,为数据处理与分析等工作提供基础。将该技术应用于风机塔筒结构分析时,首先利用三维激光扫描仪扫描获取风电塔筒的三维点云数据;继而采用配套软件对点云数据进行去噪、平滑等处理;最后根据不同的分析需求,建立形变计算和分析模型[10]。例如:文献[11]利用天宝TX8三维激光扫描仪采集风机塔筒三维数据,再计算风机塔位的垂直度偏移量;文献[12]介绍了利用Leica C10三维激光扫描仪对河北大唐某风电场进行风机塔筒倾斜观测的操作实践以及结果;文献[13-16]分别通过不同风电场实例对比了三维激光扫描技术和免棱镜全站仪的倾斜度计算和观测误差;文献[17-20]针对三维激光扫描仪获取的风机点云数据,提出在风机塔筒不同高度任意截取横截面点云,利用最小二乘原理拟合横截面点云的圆心坐标来求取倾斜率的方法。以上各方法均针对塔筒中心倾斜进行测试研究,未完整获取塔筒结构的实际形态,成果不够完整。
本文结合广东某风电场的风机塔筒检测实践情况,介绍塔筒三维激光扫描和分析计算方法,同时采用传统的沉降观测和全站仪免棱镜观测2种工程方法进行倾斜量测算,对3种技术方法的检测结果进行对比验证。
1 2种常规风机塔筒倾斜观测方法
1.1 风机基础平台不均匀沉降法推算塔筒倾斜量
陆上风机基础沉降观测的常规方法之一是采用精密二等水准测量方法定期观测布设于风机基础平台上的沉降观测点。为保证数据观测的绝对精度,需要在风机周围布设3个稳定的沉降观测基准点作为参考基准。根据在风机基础沉降监测点测得的绝对沉降量,可以计算出基础沉降速率,进而判断地基基础稳定情况及沉降趋势。根据监测点间的相对沉降量(即不均匀沉降量),可以推算出不均匀沉降引起的塔筒结构倾斜及安全情况。
1.2 全站仪免棱镜观测塔筒倾斜
风机塔筒高度普遍超过50 m,塔筒由合金钢材制作而成,在设计和建造阶段往往并未考虑运营维护阶段对塔筒结构进行倾斜数据采集的需求,没有在预定位置安装观测标志。因而现场采用全站仪对风机塔筒进行倾斜观测时,一般只能考虑免棱镜模式。
在观测塔筒前,为保证整体观测精度,需在风机基础周围布设3个基准点,兼顾平面和高程,对基准点进行导线观测,将控制点三维坐标建立在统一坐标系下,便于在对塔筒观测过程中两测站数据统一可验证。图1和图2所示分别为利用全站仪免棱镜倾斜观测示意图和现场观测图。

图2 全站仪免棱镜观测现场
如图1所示:利用已经布设好的控制点T1、T2、T3在地面上标定2个固定标志A(点A)和B(点B)作为倾斜观测的测站,A、B位于相互垂直的2个方向上,离风机塔筒的水平距离不小于风机塔筒高度的1.5倍。首先在测站A,用全站仪分别照准塔筒底部及顶部同一高度两侧视线与塔筒的相切点A1、A2、A3、A4,读出对应的水平角方向值∠1、∠2、∠4、∠5,分别计算塔筒底部及顶部的半和角:

图1 全站仪免棱镜倾斜观测示意图

(1)
式中∠3和∠6分别为测站至底部中心O1和测站至顶部中心O2方向的角度值。
测站A至底部中心与顶部中心角度值之差α=∠6-∠3,测站A至底部中心O1的水平距离
(2)
式中:L1、L2分别为测站与塔筒底部切点A1、A2的水平距离。同样地,在测站B重复测站A的操作及计算,得到测站B至塔筒底部与顶部中心角度值之差β,以及测站B至底部中心O2的水平距离S2。
则风机塔筒顶部中心相对于底部中心的总偏移量
(3)
(4)
式中a1、a2分别为塔筒顶部中心O2相对于底部中心O1在垂直于AO1、BO1方向的偏歪分量。
风机塔筒倾斜率
i=a/h1.
(5)
式中h1为风机塔筒的垂直高度。
2 三维激光扫描技术观测塔筒倾斜及结构形变
2.1 现场数据采集
三维激光扫描仪由1台高速精确的激光测距仪和1组引导激光并以均匀角速度扫描的反射棱镜组成。三维激光扫描仪发射器发出激光脉冲信号,经物体表面漫反射后,沿相同的路径反向传回到接收器,可以计算目标点P与扫描仪的距离S。三维激光扫描测量一般为仪器自定义坐标系:X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。控制编码器同步测量每个激光脉冲横向扫描角度观测值λ和纵向扫描角度观测值σ。参考图3所示的测量原理,通过式(6)计算空间测点P的三维坐标[11-12]:
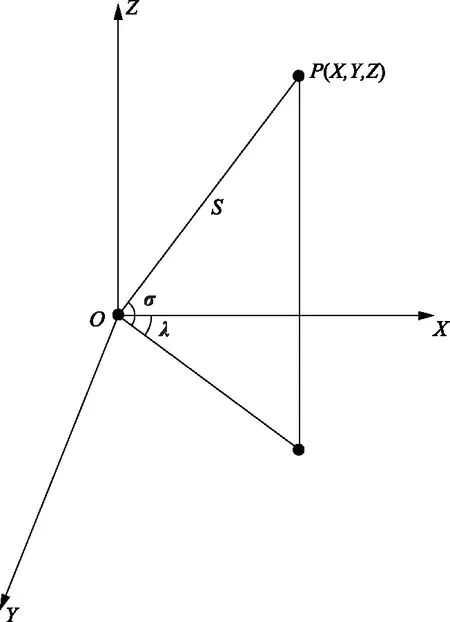
图3 三维扫描测点坐标
XP=Scosσcosλ;YP=Scosσsinλ;
ZP=Ssinσ.
(6)
本文选用FARO Focus 3D-S330型脉冲式三维激光扫描仪。在扫描开始前,在风机周边均匀布设多个球形标靶,确保在每站扫描过程中至少将6个标靶球扫描进去,且相邻两测站保证4个公共重叠标靶,这样可以保证后期数据拼接精度。
2.2 点云数据处理
将扫描完成的测站数据统一导入FARO Focus 3D S330随机配套软件FARO Technologies Scene进行数据处理,包括点云数据拼接、点云数据预处理、去噪点、均一化处理点云间隔、统一扫描分辨率等。
建立风机塔筒点云模型,将数据导出为PTS格式后[4],再导入南方测绘TOU三维点云数据处理软件,从塔筒底部0.5 m起高程方向每间距1 m对点云数据模型进行切片处理,按照最小二乘原理对每个切片截面数据进行圆形拟合。
在同一高程截面测点(xi,yi)满足式(7),其中(x0,y0)为设定高程截面测点的拟合圆心坐标,R为拟合圆的半径。
(xi-x0)2+(yi-y0)2=R2.
(7)
对于被拟合截面的所有测点,利用式(8)、(9)进行最小二乘拟合计算,依次按照各截取标高得到每个扫描切片位置的圆心和半径。
(8)
(9)
2.3 塔筒倾斜与形变测算
点云切片数据经南方测绘TOU三维点云数据处理软件处理后,可以导出不同高度下各截面圆心平面坐标相对于底部圆心的偏移量及偏移方位,并根据各高度截面偏移量与底部截面的相对高程,按式(5)计算得到倾斜率。
风机塔筒的横截面设计采用标准圆形结构,在钢结构的加工、运输、安装过程中,外力作用会使结构产生变形,且在长期运行过程中的风力作用下,风机塔筒结构承受着侧向荷载及轴向扭力作用,会产生一定的结构振动疲劳。利用三维激光扫描获得丰富的点云数据,还可以计算每个截面位置的椭圆度,进一步描述塔筒形变情况。
3 应用实例与结果对比
3.1 工程实例
针对在茂名市电白区麻岗镇建设的热水风电场进行风机塔筒倾斜检测。所在风电场平均海拔约400 m,总装机容量为50 MW。其中,一期安装32台单机容量为1.5 MW和1台2 MW的风力发电机组。以风电场2台风机(编号为9号和14号)为例,介绍检测过程和结果。
3.2 风机基础平台不均匀沉降法检测结果
从风机投产沉降观测点埋设后初始值采集至当前测试时间段间的沉降结果及沉降因数,推算出的倾斜量见表1。
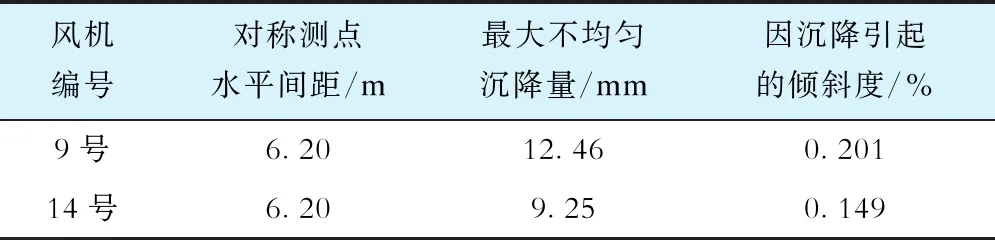
表1 风机基础不均匀沉降观测推算塔筒倾斜率
3.3 全站仪免棱镜检测结果
采用全站仪免棱镜观测法对风电场9号风机及14号风机塔筒进行倾斜观测,结果见表2。
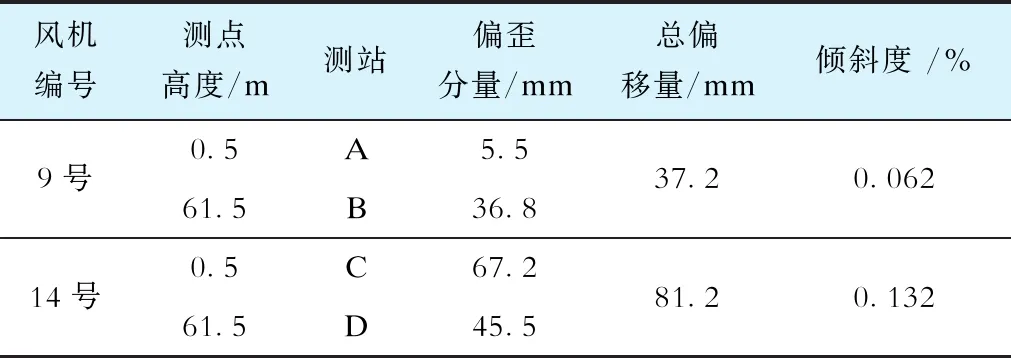
表2 全站仪免棱镜模式观测风机塔筒倾斜率
对比表1和表2,可以看出2种方法测得的倾斜度差别较大,尤其是9号风机。
3.4 三维激光扫描检测过程与数据分析
对9号风机与14号风机塔筒均按4站观测,保证塔筒扫描数据的完整性。三维激光扫描现场布置如图4所示。
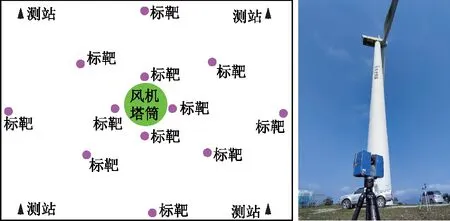
图4 三维激光扫描现场布置
采用2.2节的方法进行点云数据预处理,结果如图5所示。进而进行切片和截面圆形拟合,如图6所示。

图5 点云预处理前后数据

图6 点云去噪和切片后各截面投影
采用2.3节的方法计算可得9号风机塔筒及14号风机塔筒的倾斜率、偏移方位角和椭圆度等形变数据。图7和图8分别绘制了9号和14号风机塔筒在不同高度的倾斜率、椭圆度等变化曲线。

图7 9号风机塔筒倾斜和形变情况
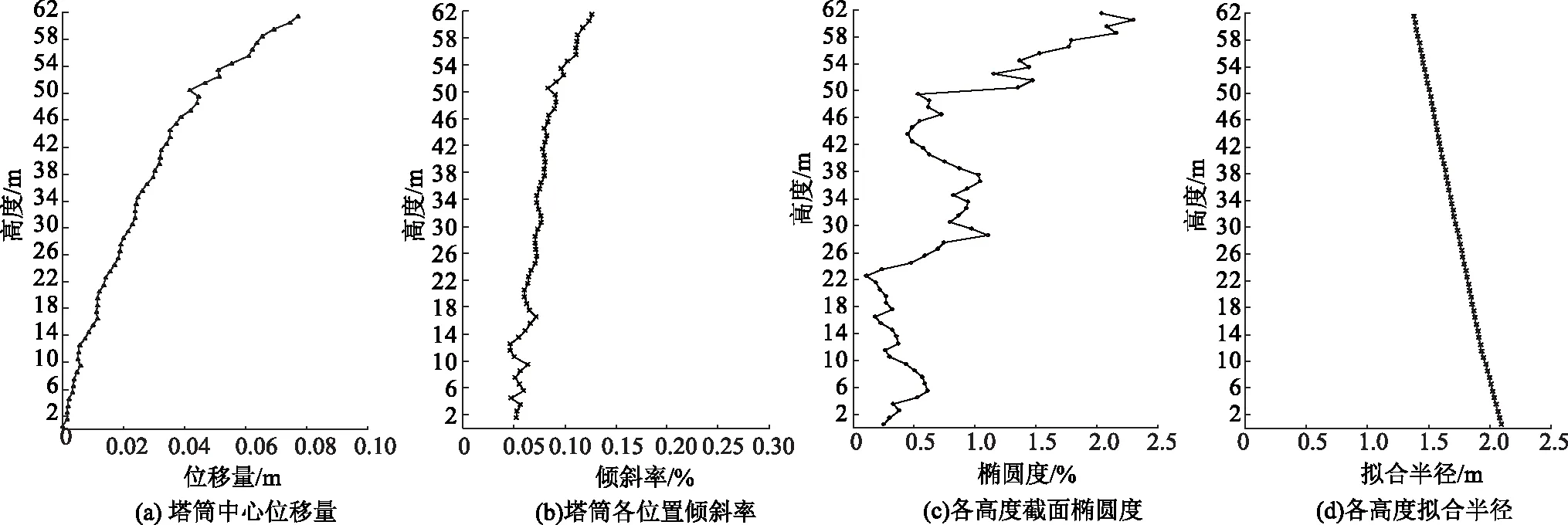
图8 14号风机塔筒倾斜和形变情况
可以看出9号风机整体倾斜量较小,在20.5~61.5 m高度区间,倾斜率在0.035% ~ 0.063%,平面位移量在11.2~35.2 mm区间。相对而言,14号风机塔筒倾斜量随高度的增加基本呈现线性趋势:在20.5~61.5 m高度区间,倾斜率在0.060%~0.126%,平面位移量在12.0~77.1 mm区间。这一结果与全站仪检测结果较为吻合,但更加全面和精细化。综合来看,2台风机塔筒倾斜率均满足规范要求的0.03%以内。
分析椭圆度曲线发现,风机塔筒结构形变较大的区域主要集中在风机塔筒顶部10~15 m范围,靠近发电机组及叶片结构区域,属于受侧向荷载及偏航振动影响而结构应力变化较为集中的区域。
3.5 3种检测结果对比分析
a)效率对比。采用电子水准仪观测基础不均匀沉降推算塔筒倾斜需从项目建设开始定期复测,延续周期长,观测周期超过1年,观测过程需要3人。采用全站仪观测塔筒倾斜,需要在风机周围提前布设3个控制点并进行联测,观测过程需要3人配合完成,且对场地要求高。全站仪免棱镜观测需要人工瞄准切线点,观测过程难度大,效率低,完成现场观测需要3 h,塔筒顶部观测仰角大,观测不便。采用三维激光扫描不需要布设控制点,只需现场摆放球形标靶,设站完后自动完成扫描,整个过程只需45 min,速度快,且可以单人完成,效率高。
b)精度对比。不均匀沉降推算塔筒倾斜精度低,沉降观测点平面距离是风机塔筒高度的1/8~1/9,不符合长边推算短边的原则。采用全站仪观测,因为塔筒没有设置标准的观测标志,整个操作过程会引入较多误差,特别是切线点的判断,不仅影响角度观测精度也影响距离观测精度,测点误差在25~30 mm。采用三维激光扫描,单站能覆盖塔筒1/3的范围,采用4站观测有足够多的重叠区域,且相邻测站间满足4个以上的公共球形标靶,点云测量及拼接误差在3 ~ 5 mm,点云拼接精度高。
c)有效信息量对比。水准沉降观测只能获取基础沉降的准确信息,而塔筒倾斜原因很多,包括不均匀沉降、外部侧向风荷载、结构振动、风机及叶片荷载,以及轴向扭转应力等,沉降推算倾斜不准确。采用全站仪观测只能获得特征区域的倾斜量,且数据信息量少,存在偶然性,数据信息不能覆盖整个结构。三维激光扫描提取的塔筒信息不仅可以发现塔筒不同高度位置的倾斜率偏差,而且能反映塔筒不同高度倾斜的方位。此外,由于有完整的塔筒表面坐标数据,还能计算每个切片位置的椭圆度,从而在一定程度上反映塔筒结构自身的形变信息,监测数据更加全面和完整。
4 结束语
运行期对风机塔筒倾斜及结构形变监测是风机安全评估的重要环节。传统电子水准仪观测基础不均匀沉降,以及全站仪测量塔筒整体倾斜均难以准确全面评价风机塔筒倾斜和结构变形。三维激光扫描技术能获取塔筒不同高度截面点云数据,通过拟合算法得到塔筒不同高度位置中心相对底部的偏移量、倾斜率、偏移方位和结构椭圆度等完整的形变数据,为运营维护提供参考,在陆上风机结构变形监测中具有推广应用前景。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
法律方法(2022年2期)2022-10-20
新型工业化(2022年5期)2022-06-17
测绘地理信息(2022年2期)2022-04-02
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
学苑创造·A版(2019年4期)2019-05-10
三联生活周刊(2017年37期)2017-09-11
居业(2017年5期)2017-07-24
现代职业教育·中职中专(2016年4期)2016-10-21
