基于扰动观测器补偿的机械臂非奇异快速终端滑模控制
2022-11-07 10:50孙国法赵尔全张国巨黄鸣宇
控制理论与应用 2022年8期
孙国法,赵尔全,张国巨,黄鸣宇
(青岛理工大学信息与控制工程学院,山东青岛 266525)
1 引言
工业现代化的快速发展得益于工业机器人技术的出现与应用,机械臂作为工业机器人的一个分支已大规模应用于工业、军事、医疗、航天等领域中.因此,对于机械臂控制系统的研究越来越受到学者们的重视[1].由于机械臂系统是一类多变量、非线性、强耦合现象严重的复杂动态系统[2-3],在实际机械臂控制过程中会受到未知扰动、内部摩擦、建模误差等不确定因素的影响,导致难以建立精确的机械臂动力学模型,增加了机械臂轨迹跟踪控制的难度[4-5].因此,为得到具有高精度、强稳定性和快速收敛的轨迹跟踪效果,引入控制算法设计具有一定鲁棒性的控制器对机械臂控制系统的研究具有重要的理论和实际意义.
针对机械臂系统存在的复杂控制问题,为能够实现高精度的跟踪性能,目前,学者们已经提出了许多的控制方法用于机械臂系统的控制中.文献[6]针对滑模PID控制(proportional integral derivative sliding mode control,SMCPID),设计了一种新的趋近律与等速趋近律和指数趋近律在轨迹跟踪、干扰抑制和质量不确定性3个方面进行了研究比较,实验结果表明新提出的趋近律性能明显优于其他趋近律.针对比例-积分-微(proportion-integral-differential,PID)控制器在机械臂控制系统中存在轨迹跟踪速度缓慢、位姿误差大的问题,设计了一种自适应鲁棒控制方法,与传统控制器相比,具有很好的可行性和可移植性[7-8].为解决机械臂系统轨迹跟踪初始误差大、到达稳态时间长的问题提出一种基于径向基函数(radial basis function,RBF)神经网络控制方法[9].袁凯等[10]针对水下机械臂系统存在的非线性和复杂性问题,设计了模糊RBF神经网络控制器,为提高系统控制精度,减小稳态误差提供了一种有效控制方法.在机械臂控制系统研究中存在模型不确定性和外部干扰的影响,学者们给出了一种基于RBF神经网络的终端滑模鲁棒控制策略,利用RBF神经网络较强的逼近能力来准确估计外部干扰,设计新的终端滑模鲁棒控制器来抑制抖振现象[11-12].由于传统滑模控制只能保证状态变量达到渐近稳定,而终端滑模控制(terminal sliding mode control,TSMC)可以使状态变量在有限时间内收敛到平衡点,具有更快的响应速度、高精度和强鲁棒性[13-14].为解决终端滑模控制与快速终端滑模控制(fast terminal sliding mode control,FTSMC)存在的奇异性问题,提出了非奇异终端滑模控制(nonsingular terminal sliding mode control,NTSMC)策略[15-17].考虑到非奇异终端滑模控制存在系统状态在远离平衡点时收敛速度慢的问题,学者们提出了将快速终端滑模控制和非奇异终端滑模控制相结合的控制策略,设计了一种非奇异快速终端滑模控制(nonsingular fast terminal sliding mode control,NFTSMC)方法[18-22],解决了非奇异终端滑模收敛速度慢与快速终端滑模控制存在的奇异问题.由于在实际机械臂控制系统中,存在许多物理参数不确定信息,仅使用非奇异快速终端滑模控制器控制机械臂系统得到的轨迹跟踪效果有限.
针对机械臂控制系统采用传统终端滑模控制方法出现的奇异性现象与状态跟踪误差收敛速度慢的问题,以及非奇异快速终端滑模控制器设计中带来的“抖振”问题,本文研究了一种基于扰动观测器补偿的非奇异快速终端滑模控制方法.
主要贡献性工作为:1)将机械臂系统中存在的总未知干扰,利用扰动观测器进行精确地估计,并将估计值作为反馈信号为控制器提供补偿,能够有效抑制扰动产生的轨迹跟踪误差,使跟踪误差在有限时间内收敛到零,提高系统的跟踪性能,增强系统的抗扰动能力;2)构造非奇异快速终端滑模面,使用符号函数与绝对值幂次乘积的形式来替代单一的幂次函数形式,避免系统出现奇异性问题,相比于文献[21,23],解决了控制器奇异性问题的同时可以得到有限时间稳定的结果,保证系统控制的收敛速度和瞬态响应性能,具有较强的鲁棒性;3)结合扰动观测器与非奇异快速终端滑模控制方法,构建基于扰动观测器补偿的非奇异快速终端滑模控制器,通过引入非线性函数fal(·)函数来代替sig(·)函数,进一步削弱抖振问题的同时实现了各关节对期望跟踪轨迹的快速高精度跟踪,相比较于文献[24]中的控制器,提高了跟踪误差在有限时间收敛到零的速度.
2 机械臂动力学模型
利用Lagrange动力学等式(1)建立机械臂系统的动力学方程[25],即
式中:L为拉格朗日函数,K,P为系统总动能与总势能;qi为关节角位置,为关节角速度,τi为作用在第i个关节上的力矩.
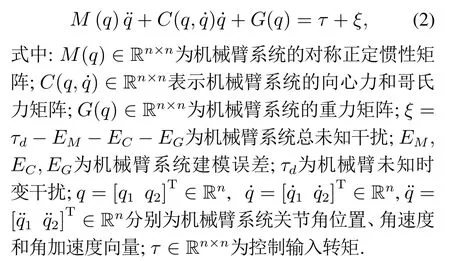
考虑到机械臂系统中存在的建模误差和未知干扰,将上式进行分解简化,机械臂系统动力学方程可以写成如下形式:
为实现后续控制策略的设计提出如下假设:
假设1机械臂系统期望关节角位置、角速度是已知的,系统实际位置、速度轨迹及一阶导数是可测的,且连续有界.
假设2总未知干扰满足连续可微且有界,即为一阶导数上界.
注1总未知干扰ξ由外部扰动跟建模误差组成,建模误差主要由机械臂自身和载荷的变化产生,由于惯性矩M(q)、向心力和哥氏力矩阵C(q,)、重力矩阵G(q)、及机械臂运行轨迹q均有界可导,且一阶导有界(满足假设1),模型外部扰动主要由机械臂与外界之间的交互力产生,在系统运行初始时刻或运行阶段的一个极小时刻内,交互力的微分可能不存在或数值极大,但由于其作用时间极短,所以仅对作用时间内的总未知干扰估计值或跟踪误差产生影响,不会影响系统总体收敛性.
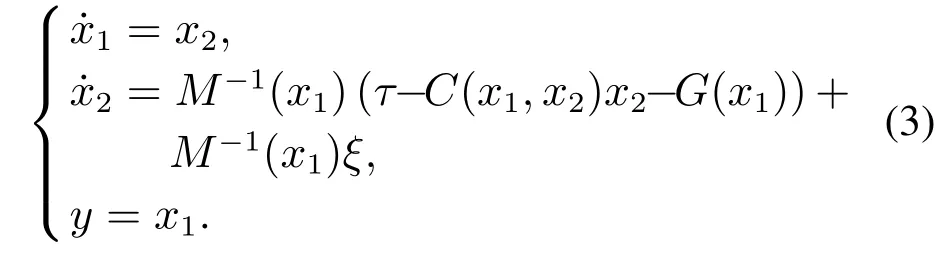
令x1=q,x2=,则式(2)可通过以下状态空间形式描述:
3 扰动观测器设计
由于机械臂实际控制系统中存在外部扰动和不确定性,会降低机械臂系统的控制精度.为减弱外部扰动对机械臂系统的影响,将机械臂动力学模型与扰动观测器相结合,利用扰动观测器逼近系统扰动,并与实际扰动做差,通过修正扰动估计值来达到扰动误差趋近于零的目的.因此为了估计扰动,机械臂扰动观测器设计为

式中:l(x)=diag{l11,l12,···,l1n}>0为非线性增益矩阵,为ξ的观测估计值.由于需要状态的角加速度信号,上述干扰观测器无法实现,而利用速度信号求微分来获取加速度信号会引入噪声造成系统的不稳定,为此:
步骤1构造辅助函数[26],定义观测器内部状态变量为

其中:ζ ∈Rn是观测器内部状态变量,h(x)∈Rn为待设计函数向量,为避免引入加速度信号,扰动观测增益矩阵l(x)与h(x)存在如下关系:

步骤2设计扰动观测器结构.由式(4)-(6)得

对上述观测器进行修改后,得到无加速度的扰动观测器为
步骤3设计观测器增益与待设计函数.定义扰动观测器的观测误差

由式(5)-(9)得观测器误差动态方程为

由于在实际情况下无干扰微分的先验知识,故假设ξ相对于扰动观测器的特性变化是缓慢的,即=0,则误差动态方程为
为实现通过调节增益l(x)使扰动观测值逼近总未知干扰ξ,使观测器误差z可以按指数收敛到零,实现对ξ的准确估计,保证观测器的稳定性,构建如下Lyapunov函数:

4 非奇异快速终端滑模控制器设计
控制器设计目标:设计反馈控制律τ,使机械臂系统的关节角位置q能在限时间内快速准确的跟踪期望轨迹q*.机械臂系统控制框图如图1所示.
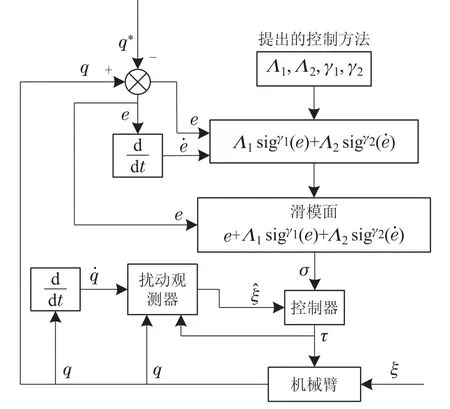
图1 机械臂系统控制框图Fig.1 Control block diagram of manipulator system
机械臂关节跟踪误差用e表示,定义为

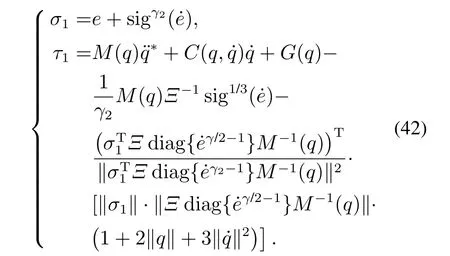
为了避免机械臂系统的奇异问题,保证系统的全局收敛时间.通过引入符号函数与绝对值幂次的乘积形式,避免复数形式的出现,从而克服系统的奇异问题.因此,设计非奇异快速终端滑模面函数为

等式中涉及的矩阵有


其中:τeq是机械臂系统到达滑模面σ==0时,得到的等效控制器.τest为鲁棒控制器,用来消除机械臂建模误差和外部扰动对系统控制品质造成的影响.
将式(21)带入式(20)得等效控制器为

控制器中角位置跟踪误差e及角速度跟踪误差的指数项都大于零,避免出现奇异现象,使系统具有非奇异特性.
为使状态变量在滑模面上趋近于原点前进一步削弱运动轨迹的抖振,控制器采用幂次函数fal(σ,α,δ)来替代sig(σ)函数,对系统做平滑处理,fal(σ)函数表达式为

式中:α,δ均为设计参数,其中0<α <1为影响跟踪速度的常数;0<δ <1为影响滤波效果的常数[27].下图2 所示为fal(σ)函数与符号函数sig(σ),饱和函数sat(σ),连续函数theta(σ),反正切函数atan(σ),双曲正切函数tanh(σ)的运动轨迹比较曲线.从图中可以看出fal(σ)函数曲线响应速度较快,能够快速趋近于1,具有快速收敛的优点,对于抑制输入抖振提高系统动态响应过程的收敛速度具有重要作用.
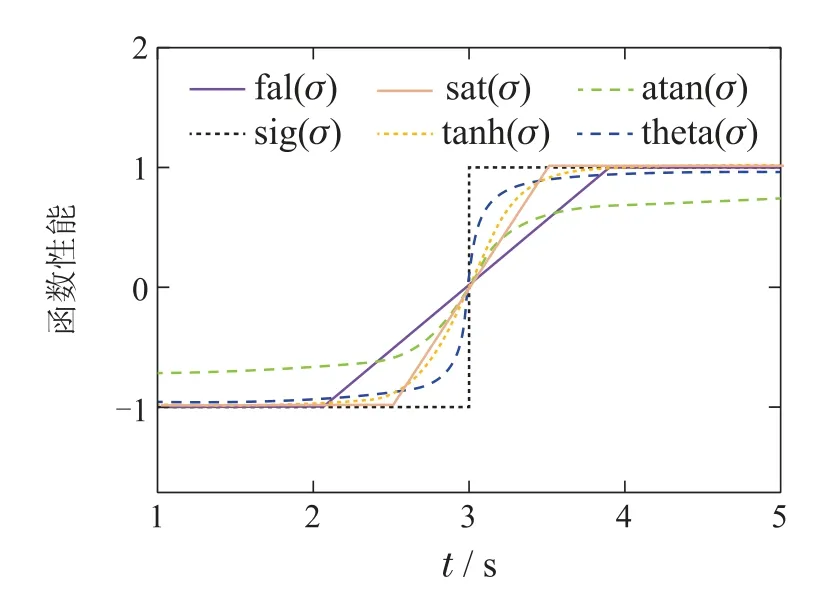
图2 切换函数运动轨迹Fig.2 Motion trajectory of switching function
则式(25)转换为
因此,设整个机械臂控制系统的正定标量函数为V=VDO+VNFTSM,由于在有限时间内观测误差z可以收敛到零,故VDO=0,则

那么,以下属性成立:
1) 系统的初始点是有限时间稳定的;
2) 有限时间tr存在上界,使V(t)在有限时间tr内收敛到V0,满足
注3如文献[30]所述,可以发现带有误差导数绝对值幂次方的矩阵可以求得其最小特征值,本文推导的Lyapunov微分形式满足下一步有限时间稳定性证明条件.
为证明平衡点是稳定的,据有限时间稳定性的定义[31],即在任何0的情况下,跟踪误差e将在有限时间内沿滑模面(18)收敛到平衡点,有限时间Tr由下式给出:
由Lyapunov稳定性判据可知,所设计的滑模控制器是渐近稳定的.械臂系统的输出跟踪误差e将在有限时间沿滑模面收敛到零.
5 仿真分析
为验证所提控制方法的有效性,将所设计的控制方法应用于二自由度刚性机械臂轨迹跟踪控制系统中,建立一个两自由度机械臂平面模型作为仿真对象如图3所示.
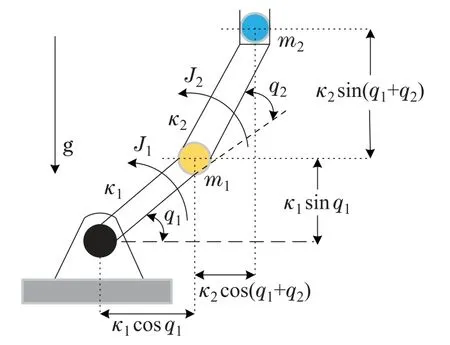
图3 两自由度机械臂模型Fig.3 Model of two degrees of freedom manipulator
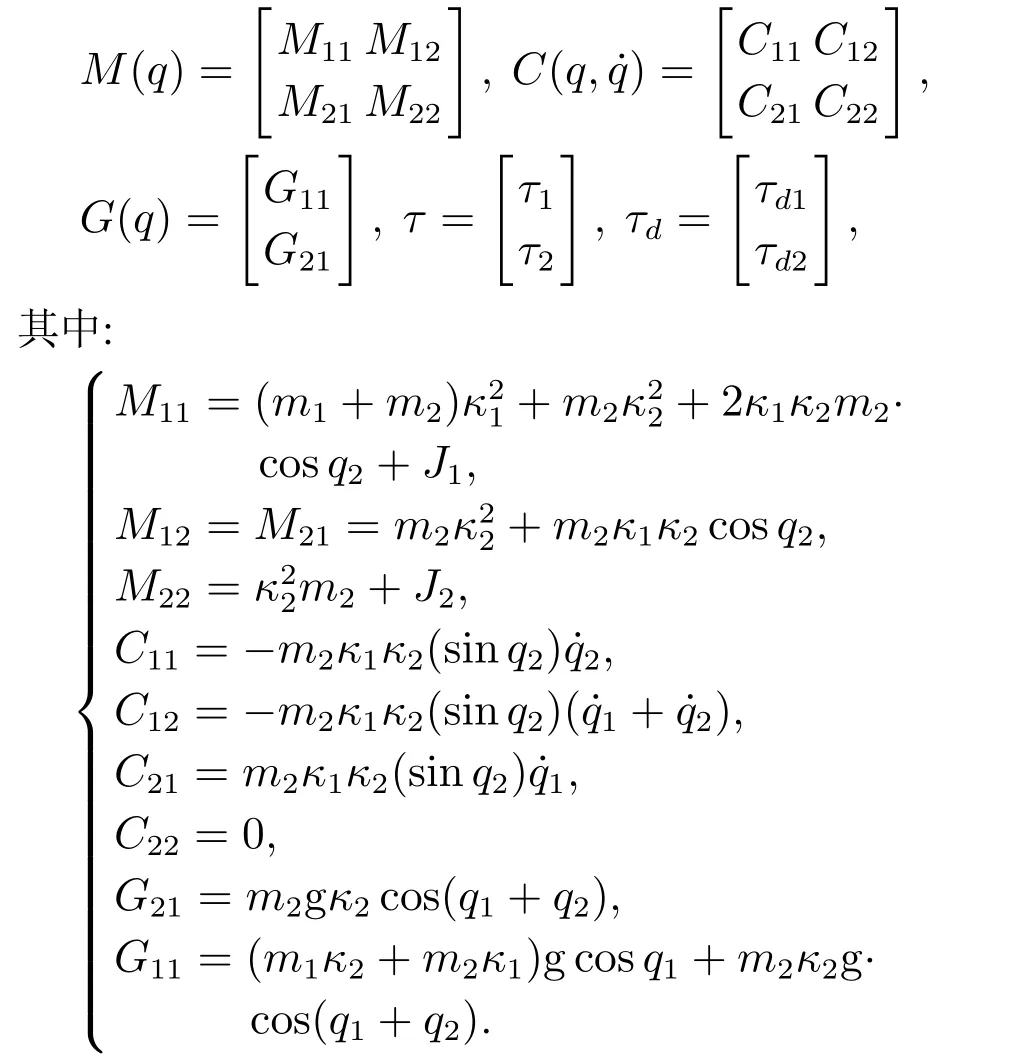
图中:κ1,κ2为机械臂连杆长度;m1,m2为连杆质量;J1,J2为机械臂惯性力.机械臂动力学方程中所涉及的矩阵
控制器(27)中的仿真参数选取步骤如下所示:
步骤4根据机械臂非奇异快速终端滑模控制器的设计原理,首先给出了控制器各参数首次出现时的物理意义及取值范围,如:1<γ2i <2,γ1i >γ2i等.
步骤5通过分析不同参数对所设计有限时间滑模收敛的影响,兼顾考虑收敛速度、响应时间、曲线平滑程度等影响,选取参数在仿真1中与其他滑模面做对比.为保证系统稳定性,在进行有限时间稳定性分析证明时,依据文献[28]对具体参数进行限制.
步骤6因此,为得到理想的跟踪特性,控制器参数的选择都是在步骤1,2允许范围内进行,然后通过多次仿真实验,观察跟踪误差效果来确定最佳参数,直到获取最佳效果.机械臂物理参数特性及控制器、观测器参数的具体设计如表1所示.
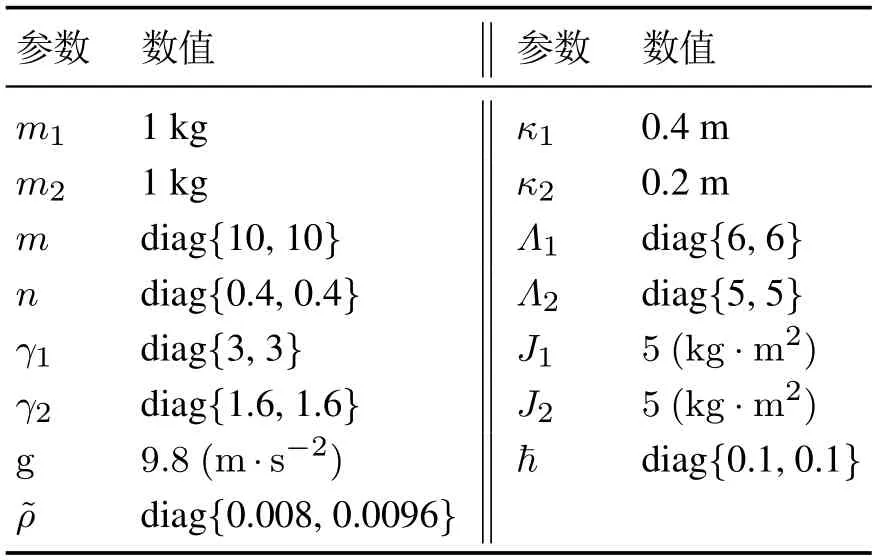
表1 参数设计表Table 1 Parameters design table
机械臂系统初始关节角位置取为q=[0.1 0.1]T,初始关节角速度为=[0 0]T,EM=0.2M,EC=0.2C,EG=0.2G,受到的外界干扰参数取为τd=[0.5 sin(πt) 0.5 cos(πt)]T,两关节期望轨迹取为q*=[]=[0.5 sin(πt) sin(πt)]T.
5.1 收敛性比较
为验证本文所采用滑模面的优越性,首先假设扰动di=0 时,与文献[21]中的终端滑模面(TSMC)、非奇异终端滑模面(NTSMC)及文献[23]中的快速终端滑模面(FTSMC)来对闭环控制作比较.
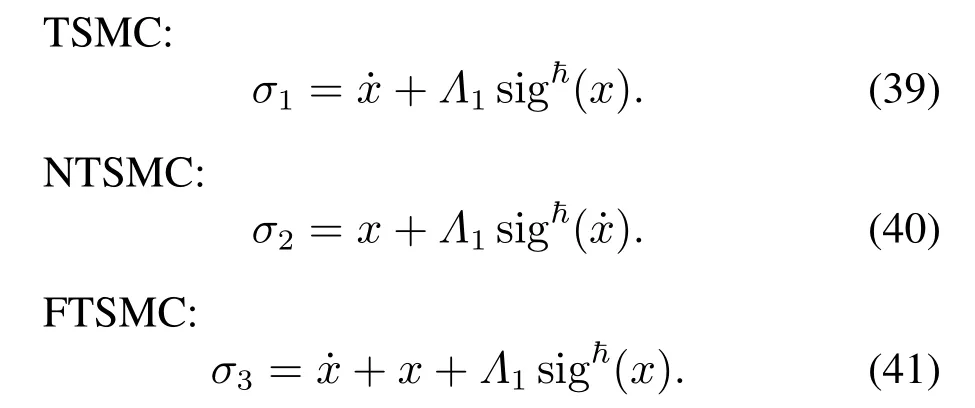
为体现仿真的公平性滑模参数的取值与本文相同,当初始状态取不同的初始值x(0)=10,x(0)=100时,在不同滑模面上的收敛响应曲线如图4所示.
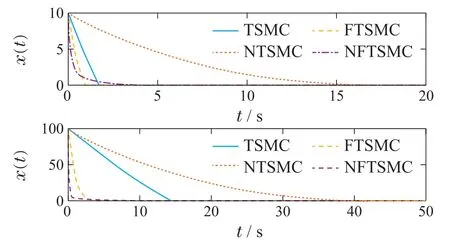
图4 di=0时系统状态x的收敛响应曲线Fig.4 Convergence response curve of the system state x for di=0
从图4中可以看出在不同初始条件下NFTSMC相比较其他3种滑模面具有较快的收敛速度,系统状态x(t)能够更快的收敛到平衡状态.为验证NFTSMC在扰动条件下的收敛性能,在第2次仿真中假设加入扰动信号d1=sin(t+1)与d2=2 sin(t+3)情况下的系统响应曲线如图5所示.
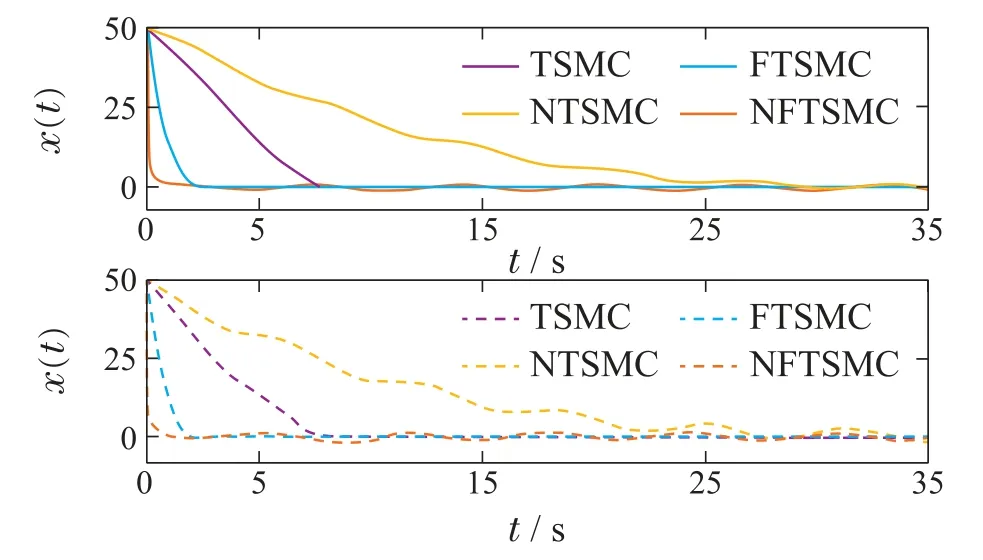
图5 di 0时系统状态x的收敛响应曲线Fig.5 Convergence response curve of the system state x for di 0
由图5系统状态在扰动作用下的收敛曲线可知,本文所采用的NFTSMC在不同扰动条件下,仍能够保证快速的收敛速度和响应时间,具备一定的抗扰动能力,有较强的鲁棒性.
5.2 控制器比较
为验证本文所设计控制方法的有效性,仿真实验与NTSMC,基于扰动观测器补偿的滑模控制(sliding mode control,SMC)及基于模型补偿的比例微分(proportional differential,PD)控制进行比较:
1) 控制器1: 为了突出改进的NFTSMC对抖振的消除效果,基于非奇异终端滑模面构建滑模控制器,记为NTSMC,滑模面和控制器分别为
式中:Ξ=diag{150,150},参数γ2的取值与NFTSMC相同.
2) 控制器2: 为了体现出NFTSMC的控制效果,构建采用基于扰动观测器补偿的SMC,记为SMC,该控制器的滑模面和控制器分别为
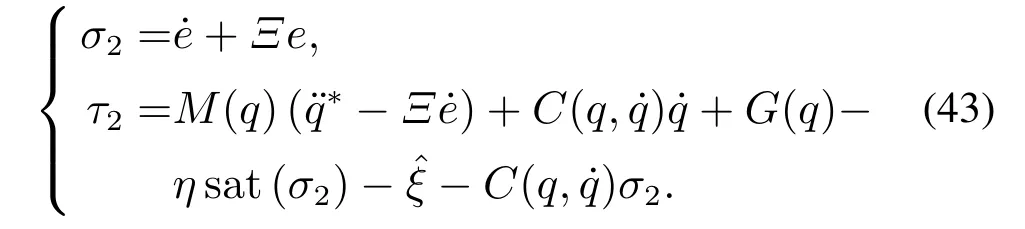
其中:η=diag{25,25},饱和函数边界层厚度为0.2.
3) 控制器3: 为了突出NFTSMC对于控制精度和跟踪误差收敛速度的控制效果,构建基于模型补偿的PD控制器,记为PD控制,表达式为

式中:kd=diag{30,30},参数Λ2的取值与表1相同.
从系统控制精度、收敛速度及控制力矩3个角度,对各控制器进行仿真比较分析.
从图6-7仿真结果可以看出,NFTSMC相比NTSMC位置跟踪效果差别最为明显,NFTSMC机械臂关节1,2在0.8 s后可以实现跟踪,NTSMC需要在3.3 s后实现完全跟踪,相比SMC与PD控制,NFTSMC机械臂关节1位置、速度轨迹跟踪具有良好的跟踪响应特性;仿真图8中,NTSMC具有明显的控制输入抖振,采用fal(·)函数代替符号函数设计的NFTSMC削弱抖振效果明显,能够达到理想的控制效果;图9为扰动的观测效果,从图中可以看出设计的扰动观测器能精确的估计出系统中存在的总扰动,可以对控制输入进行实时补偿,有效抑制系统抖振提高系统的控制精度;图10中NFTSMC与其他控制方法相比两个关节轨迹跟踪误差响应时间都在1.3 s后达到预期跟踪效果,具有较高的控制精度,能在有限时间内使系统轨迹跟踪误差收敛到零.
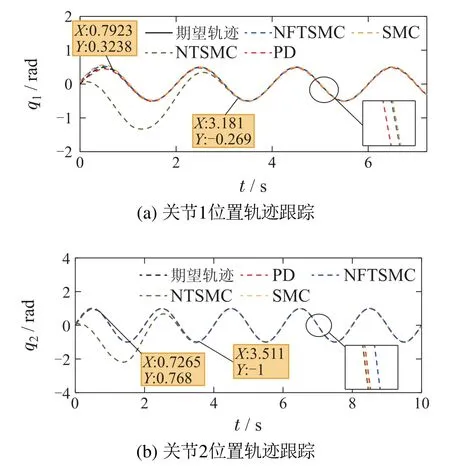
图6 关节1,2位置轨迹跟踪Fig.6 Trajectory tracking of joint 1 and 2
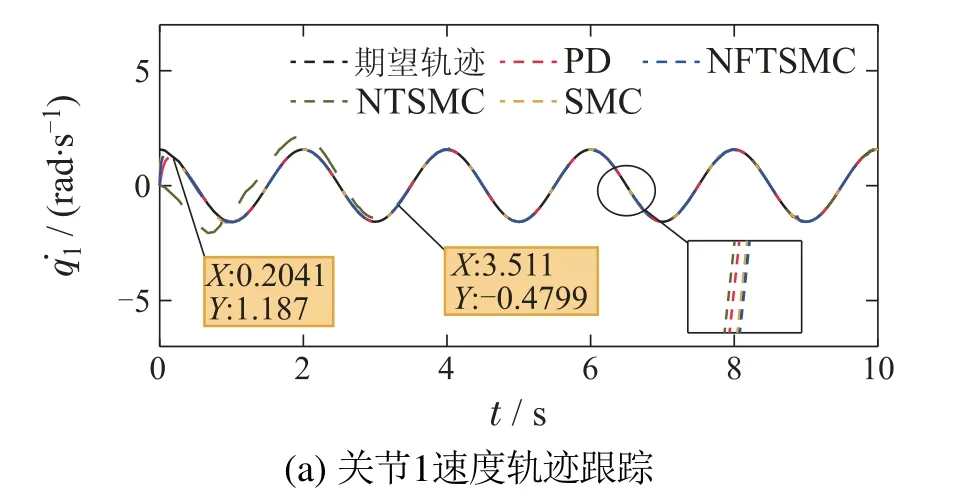
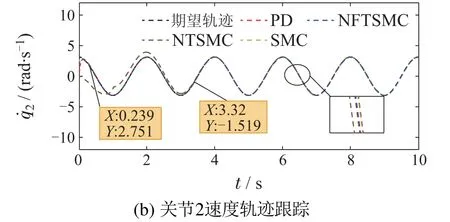
图7 关节1,2速度轨迹跟踪Fig.7 Joint 1 and 2 velocity trajectory tracking
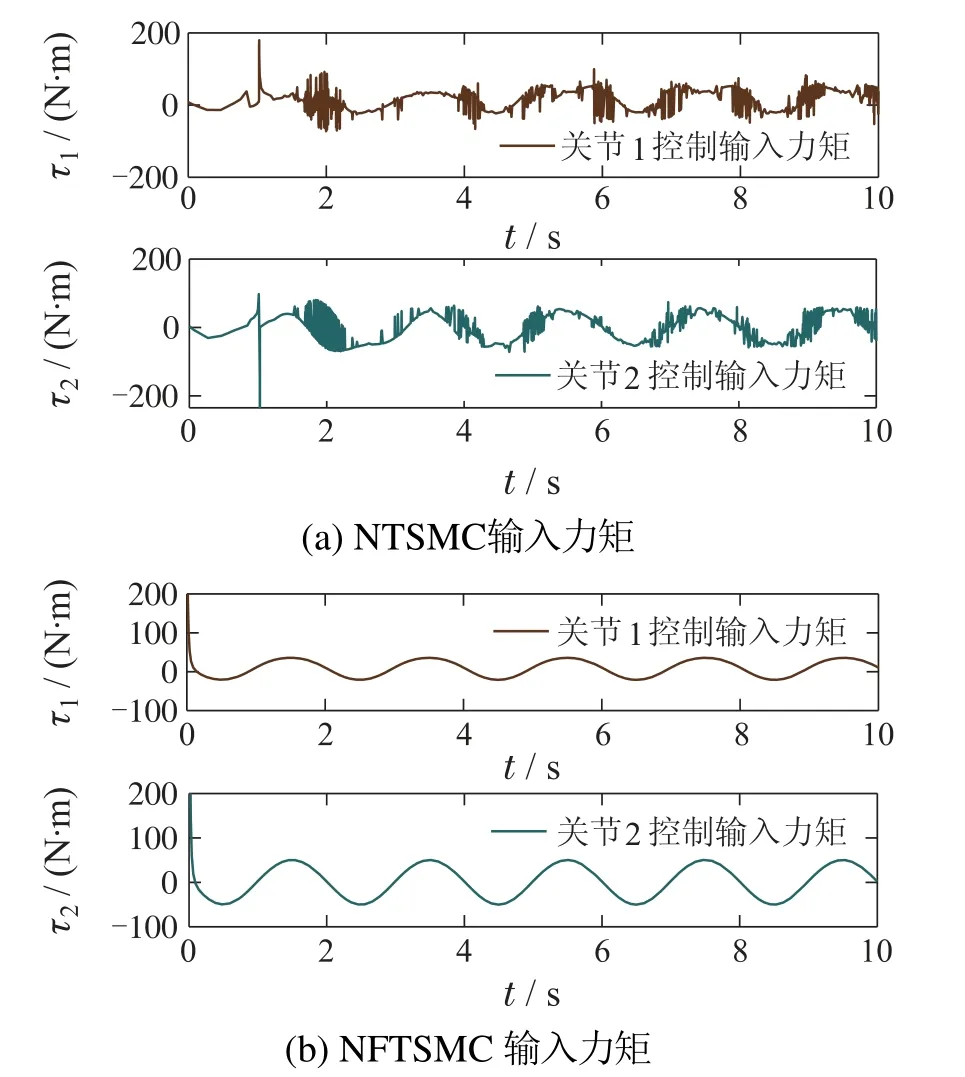
图8 关节1,2控制输入力矩Fig.8 Joint 1 and 2 control input torque
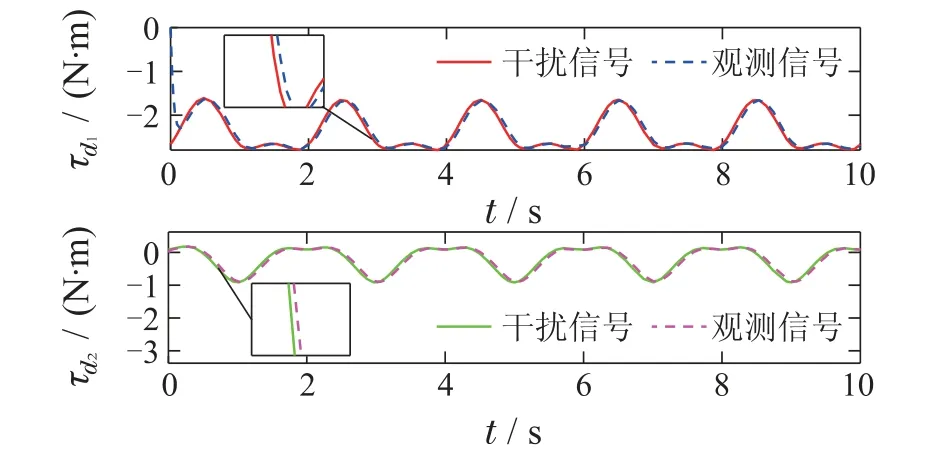
图9 关节1,2扰动观测器轨迹跟踪Fig.9 Trajectory tracking of joint 1 and 2 disturbance observers
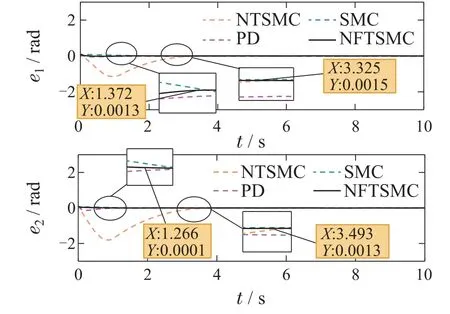
图10 关节1,2跟踪误差轨迹Fig.10 Joint 1 and 2 tracking error trajectory
在上述控制器仿真比较下,为进一步验证本文所设计控制器的优越性,对机械臂系统采用快速终端滑模控制(FTSMC)[24]进行仿真比较,如图11-12所示.
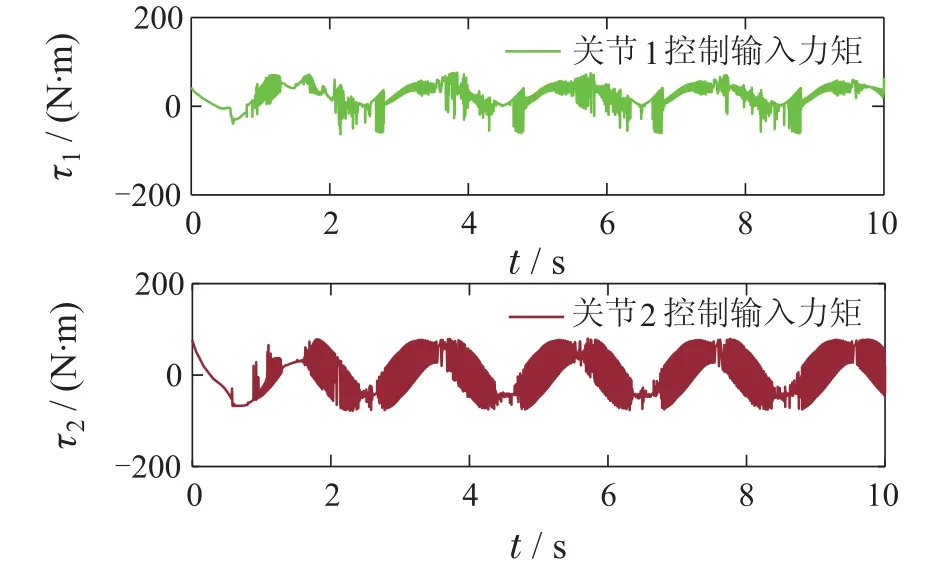
图11 FTSMC控制输入力矩Fig.11 FTSMC control input torque
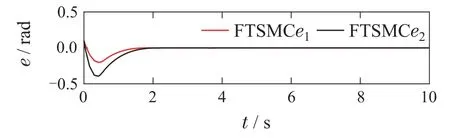
图12 FTSMC跟踪误差收敛曲线Fig.12 FTSMC tracking error convergence curve
可以看出相较于FTSMC,基于观测器补偿的NFTSMC不仅能够解决控制输入抖振问题(图8(b)),还能实现跟踪误差的快速收敛(图10),提高系统控制精度,验证了所设控制器的有效性与可行性.
注4由于控制对象系统相同,为公平比较,FTSMC的参数取值与文献[24]相同,本文控制器参数选取如表1所示.
5.3 观测器性能
为验证观测器对控制器前馈补偿的有效性,采用有无观测器补偿的NFTSMC方法进行仿真比较,仿真结果如图13所示.通过跟踪误差收敛响应曲线发现,加有观测补偿的控制器能够有效抑制扰动产生的轨迹跟踪误差,具有较好补偿的性能.
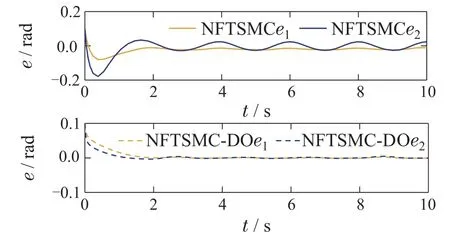
图13 有无观测补偿的跟踪误差收敛响应曲线Fig.13 Tracking error convergence response curve with and without observation compensation
6 结论
本文针对机械臂控制系统存在的未知扰动和建模误差问题,提出了基于扰动观测器的非奇异快速终端滑模控制方法,基于Lyapunov稳定性理论证明了控制器和扰动观测器的稳定性,以实现机械臂控制系统在未知扰动作用下的轨迹跟踪.通过仿真对比实验表明,所设计的控制方法能够提高机械臂的控制精度,两关节位置、速度的跟踪效果表现出了期望的响应特性和跟踪性能.通过扰动观测器可以快速准确地估计出总扰动,为控制器提供补偿以消除建模误差和未知扰动.将非奇异快速终端滑模控制器与扰动观测器相结合,采用fal(·)函数替代sig(·)函数的控制策略,能够使系统跟踪误差在有效时间收敛到零点的同时降低控制输入抖振,提高系统的鲁棒性.
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
现代电力(2022年2期)2022-05-23
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23