
深海RAP下的水声信道特性与通信技术研究
2022-11-05 12:53李伟哲刘嘉奥
数字海洋与水下攻防 2022年5期
李伟哲,韩 笑,*,曹 然,刘嘉奥
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨 150001;2.海洋信息获取与安全工信部重点实验室(哈尔滨工程大学)工业和信息化部,黑龙江 哈尔滨 150001;3.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001)
0 引言
“以深制海”已成为越来越多国家的战略目标,而力求在更大深度上取得进展已成为各国努力的方向[1]。随着科学技术持续不断的发展,未来的作战模式无疑将形成海陆空一体化的协同作战网络。目前,水上部分大多使用高速、宽带的电磁通信技术,且已经实现了联合作战,现在军事方面的重点发展和突破对象就是水下传感器和水下各个平台之间的跨区域跨层通信问题,实现深海潜水器和水面舰艇之间的跨层信息传输也是对深海进行科学勘测的关键[2]。
近年来,越来越多的研究人员将水听器放置在临界深度(此深度的声速等于地表附近的最大速度)以下来进行水下的定位和探测,其效果相对于其他路径要好很多[3]。因为在深海区域,海面对环境的影响较小,而且在远处的航船等产生的噪声很难渗入,这就使得深海水声环境变化小,且信道结构更加稳定。可靠声路径(RAP)是深海声传播的一种特殊而重要的通道[4]。假设某一海洋的临界深度存在且和海底之间存在深度余量(临界深度到海底之间的深度),当声源或接收点位于临界深度和海底之间时其传播将遵循可靠声路径声传播,此时的声线受界面影响很小可以到达较远的距离[5]。换句话说,当声源处于较浅的深度时,可以通过接收深度设置的较深一些来减小海面效应和海底的反射,而且在此条件下的接收信号中以直达声信号和海面反射声信号为主,传播损失相对于其他的声传播路径可以降低10~20 dB[6]。
在可靠声路径方面美国投入的研究较多一些,最初美国的深海海啸灾害监测系统(DART和DART Ⅱ)就是基于可靠声路径建立的,该系统的监测仪被放置在了海底,通过可靠声路径传播可以为美国的大气管理局对海啸提供远程监测[7];为了改变安静型潜艇发展的不对等威胁,美国国防部率先启动了基于可靠声路径的分布式潜艇猎捕系统(DASH)[8]。国内对于可靠声路径的研究相对较少,西北工业大学的杨坤德、段睿等对可靠声路径的物理特性进行了分析,在深海可靠声路径条件下提出了基于多途到达结构的目标定位方法[8-9];国防科技大学的邱春燏、陈羽等人在可靠声路径下改变改变声源的距离,针对深度余量内的信号垂直相关性的变化进行了仿真分析[10];海军航空工程学院的王鸿吉、杨日杰等对可靠声路径的物理机理进行了分析,然后在Munk声速剖面下将可靠声路径与时间反转镜结合,对垂直水听器阵时反定位问题进行了研究和分析[11]。
目前国内对于可靠声路径的研究较少,而且主要是利用可靠声路径进行目标的探测和定位。本文主要以射线声学仿真为基础,从可靠声路径的声传播出发,对比分析了几种不同海洋参数条件下的声传播特性,然后在可靠声路径声线结构的基础上分析了可靠声路径下单载波通信算法的性能,并总结了利用可靠声路径进行信息传输的优势。
1 RAP的形成机理与声传播特性
深海声道存在于全球的深海海域,例如我国的南海和台湾海峡等,因其具有十分良好的声传播性能而受到广泛的关注。声道轴是深海声道所特有的,在声道轴处的声速是一个极小值,在声道轴的上下其声速梯度正相反;深海声道的另一个不同于表面声道特点就是其不受季节变化的影响,声道效应稳定[12]。
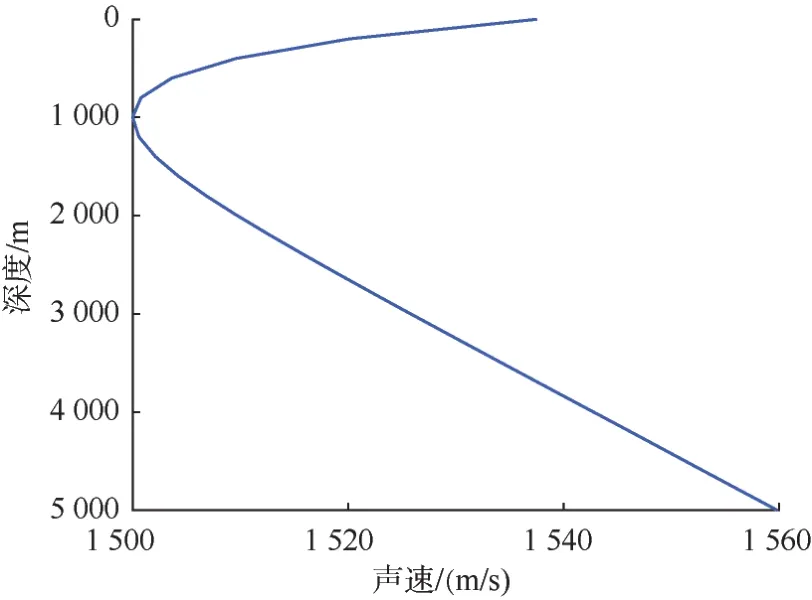
图1 典型深海区域的Munk声速剖面Fig.1 Munk sound velocity profile of a typical deep-sea area
可靠声路径(RAP)存在于深海海域,对于有临界深度的深海,将声呐设备放置于临界深度和海底之间(存在深度余量),此时海面反射和海底散射对声传播的影响较小,远处的航船等噪声对声场分布影响也较小,直达声可以到达的距离较远,根据声场的互易性,收发位置互换也是遵循的。Munk模型通常被用来描述深海声道的声速分布,Munk模型的数学表达式为[12]

式中:η= 2 (z-z0)/B;z0= 1 000 m 为声速极小值的位置;B= 1 000 m为波导宽度;c0= 1 500 m/s为声速极小值;ε= 0 .0057为偏离极小值的量级。典型的深海 Munk声速分布模型如图 1所示,海深5 000 m,声道轴位于1 000 m,临界深度大致位于3 700 m左右,本文可靠声路径的相关仿真工作都是基于该声速剖面进行的。
图2给出了声源位于海底和海面附近的2种典型的RAP声传播损失分布(传播损失是在声源辐射频率附近的窄带内取平均得到的,且单位是dB,下同)。从图2(a)可以看出声源位于海面附件时,在临界深度以下,低传播损失区域的分布可以达到40 km左右。在此区域之内,直达波能量强,主要原因是由于临界深度的存在,当深度余量足够大时,声线在接触海底之前由于折射会反转,不经海底反射而继续以直达声和海面反射声的形式传播,在海面附近形成一个汇聚区,传播损失很低。

图2 声传播损失空间分布(1 kHz)Fig.2 Spatial distribution of sound propagation loss (1 kHz)
根据声场互易性,声源放在海底附近时(深度余量内),如图2(b)在40 km左右的整个中等距离内不存在影区,尤其是左侧的一个“碗”状区域之内,传播损失更低,这个“碗”状区域就是RAP的主要分布区域。根据RAP的分布特性,将接收器放在海底附近时,可以无盲区的对近海面区域进行探测,同样可以实现海底与浅层区域的跨层通信。
2 环境参数变化对RAP声传播的影响
在实际的海洋中,水体介质的分布是随机的、不均匀的,海洋参数动态起伏导致了实际的海洋环境中存在各种不确定性。下面分析几种海洋环境参数对RAP声传播的影响。
2.1 海水深度对RAP声传播的影响
在图1的声速剖面下,分别设置海深3 000 m,3 500 m,4 000 m,5 000 m进行仿真,声源位置固定,都放置在50 m深的位置,结果如图3所示。很明显,随着海深的不断降低,低传播损失区域也在不断地变小,较远距离的海面处的汇聚区也在不断的变小。5 000 m海深对应的深海低传播损失区域可以达到47 km左右;4 000 m海深也存在临界深度,但是其深度余量小,导致其低传播损失区域也小一些,最远可以到达 40 km左右;在海深3 500 m时,临界深度不存在,此时海底附近的低传播损失区域只有 28 km左右,同样的,在海深3 000 m时,低传播损失区域仅有19 km左右。
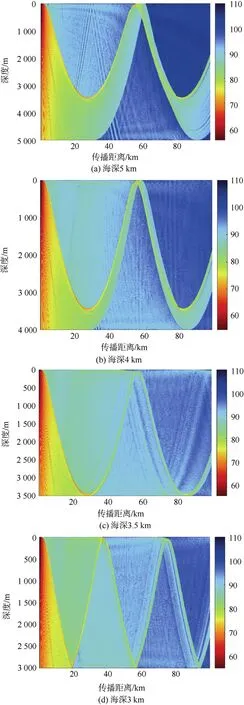
图3 不同海水深度下的传播损失图Fig.3 Propagation loss diagram at different sea depths
值得一提的是,我国南海部分海域的海深不足4 000 m,其不存在临界深度,声传播模型类似于3 500 m和3 000 m海深的仿真结果,当声源布放在海面较浅区域时,海底附近的低传播损失区域范围较小,此时的低传播损失区域也可当作RAP处理,且由于扩展损失小,声场能量更强。在处理不存在临界深度的海域时,可以根据实际情况将海面处声源布放的稍微深一些,如图4所示。声源深度200 m,此时3 000 m海深的低传播损失区域达到了35 km左右,相对于图3(d)远了15 km左右,此时可以找到声源位置处声速对应的共轭深度,使更多的声线在到达海底之前反转,继续以直达声的形式传播。

图4 海深3 000 m声传播损失分布Fig.4 Distribution of sound propagation loss at a depth of 3000m
声源深度50 m固定,海水深度从1 000 m变化到5 000 m,进行最大低传播损失区域的对比,如图5所示。可以看出随着海深的不断增加低传播损失最大区域也在增加,且在临界深度(3 700 m)附近存在一个跳变,使低传播损失区域增大很多。
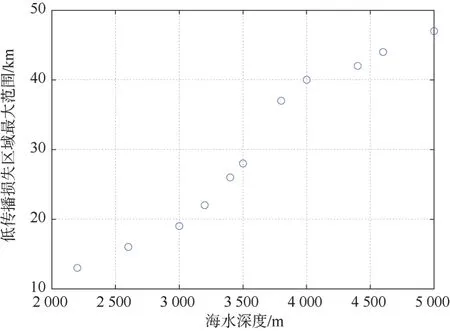
图5 不同海深对应的海底低传播损失区域Fig.5 Different seabed low propagation loss area at different sea depths
2.2 水平声速变化对RAP声传播的影响
在实际的海洋环境中,海水的声速受海洋中尺度运动等现象的影响而不断变化,一个典型的例子就是海洋内波,海洋内波是一种由于海水密度分层而产生的重要的海洋现象。当海洋内波水平传播时,其会与海洋中的随机表面波发生混合,从而导致等密度面的波动,等密度面的波动会导致声速的方向和大小都发生改变[8],对声呐的性能有很大的影响。
在图1的声速剖面的基础上,选取3个不同的观测时刻,每个观测时刻的水平声速变化如图6(a),6(c),6(e)所示,通过水平声速变化对图1的声速剖面进行修正,然后仿真得到每个声速剖面对应的声传播损失图,如图6(b),6(d),6(f)所示。

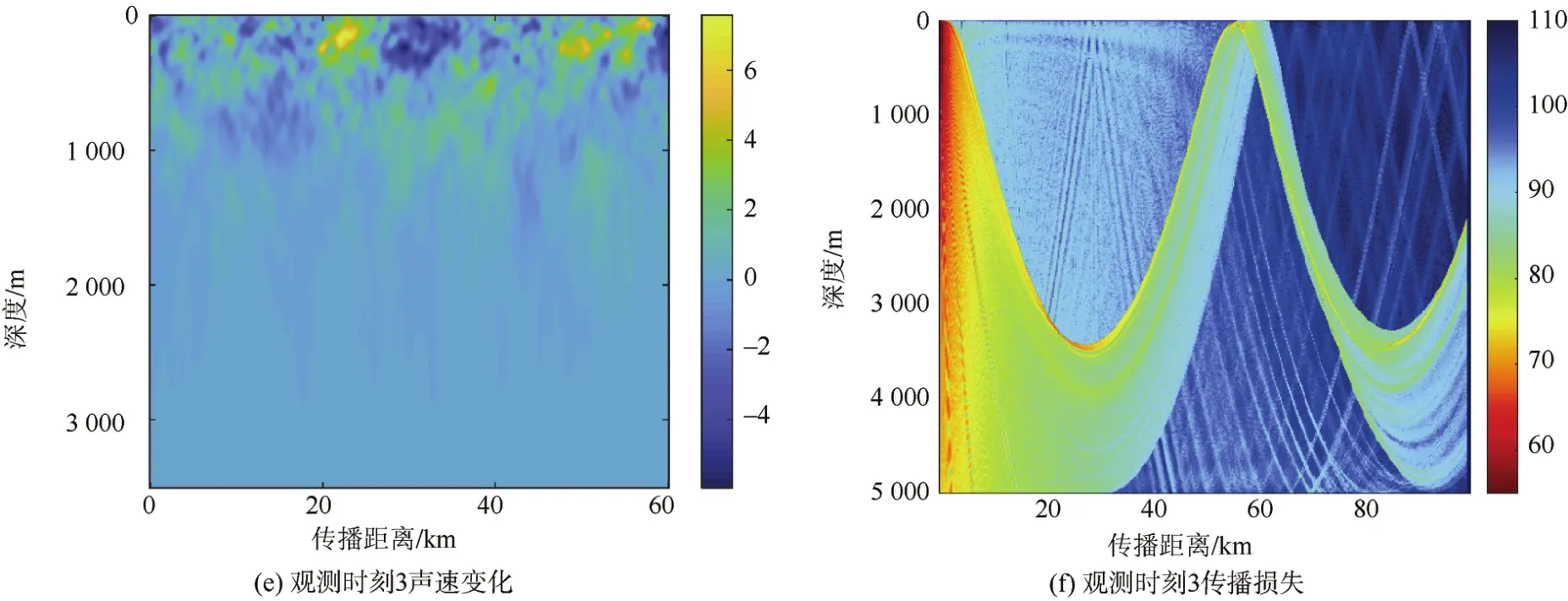
图6 3个不同观测时间对应的声速变化和传播损失图Fig.6 Diagram of sound velocity change and propagation loss at 3 different observation times
通过图6可以看出,在1 500 m深度以上,内波引起的速度的变化相对较大一些,而在1 500 m以下,其声速变化很小,在3 000 m深度时几乎就没有变化了。结合图 2(a)对比声传播损失图可以看出水平声速变化对中等距离内RAP区域的声传播特性影响很小,不同的是在影区部分出现了一些干涉条纹,这说明了RAP信道稳定,线性内波对其声传播影响很小。声速起伏对可靠声路径影响小的原因是经海底附近传播的直达声波在海洋上层区域传播时掠射角较大,根据Snell定律可以知道,声线掠射角大,声速的起伏变化对其折射角的影响相对较小。
2.3 海底参数变化对RAP声传播的影响
在实际的海洋环境中,海底的介质不是均匀的,而且受环境的影响,海底介质的参数也不是一成不变的,为了更好的分析RAP区域的声传播特性,改变海底底质参数(声速、密度和声衰减系数)来进行对比分析。得到的结果如图7所示。

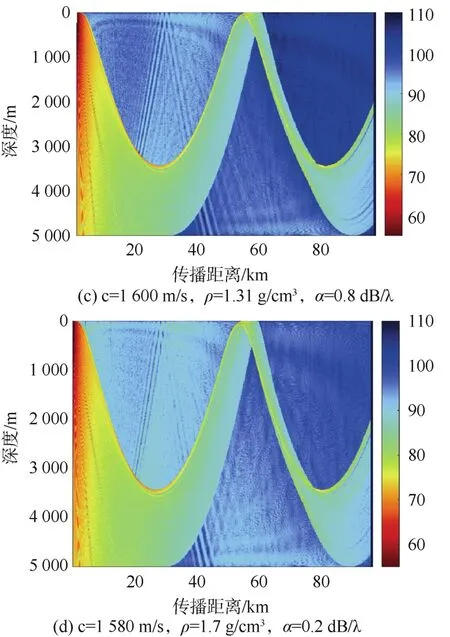
图7 不同海底参数下的声传播损失空间分布Fig.7 Spatial distribution of sound propagation loss under different seabed parameters
从图7中的4个图可以看到,对应不同的海底参数得到的声传播损失在中等范围内的RAP区域是一样的,海底参数主要影响的是更远距离的声影区,因为在RAP区域声线主要以直达声和海面单次反射声线为主,海底反射声能量很低。这进一步说明了RAP声传播的稳定性,受界面影响较小。
3 RAP区域的单载波通信性能分析
3.1 基于RAP的声线结构分析
声线结构的仿真采用图 1所示的声速剖面,声源辐射频率1 kHz,海底声学参数如下:假设海底平坦,海底参数为c=1 600 m/s,ρ=1.7 g/cm3,α=0.8 dB/λ。声源深度取 50 m,接收机深度取4 900 m,改变接收水平距离,本征声线结构如图8所示。
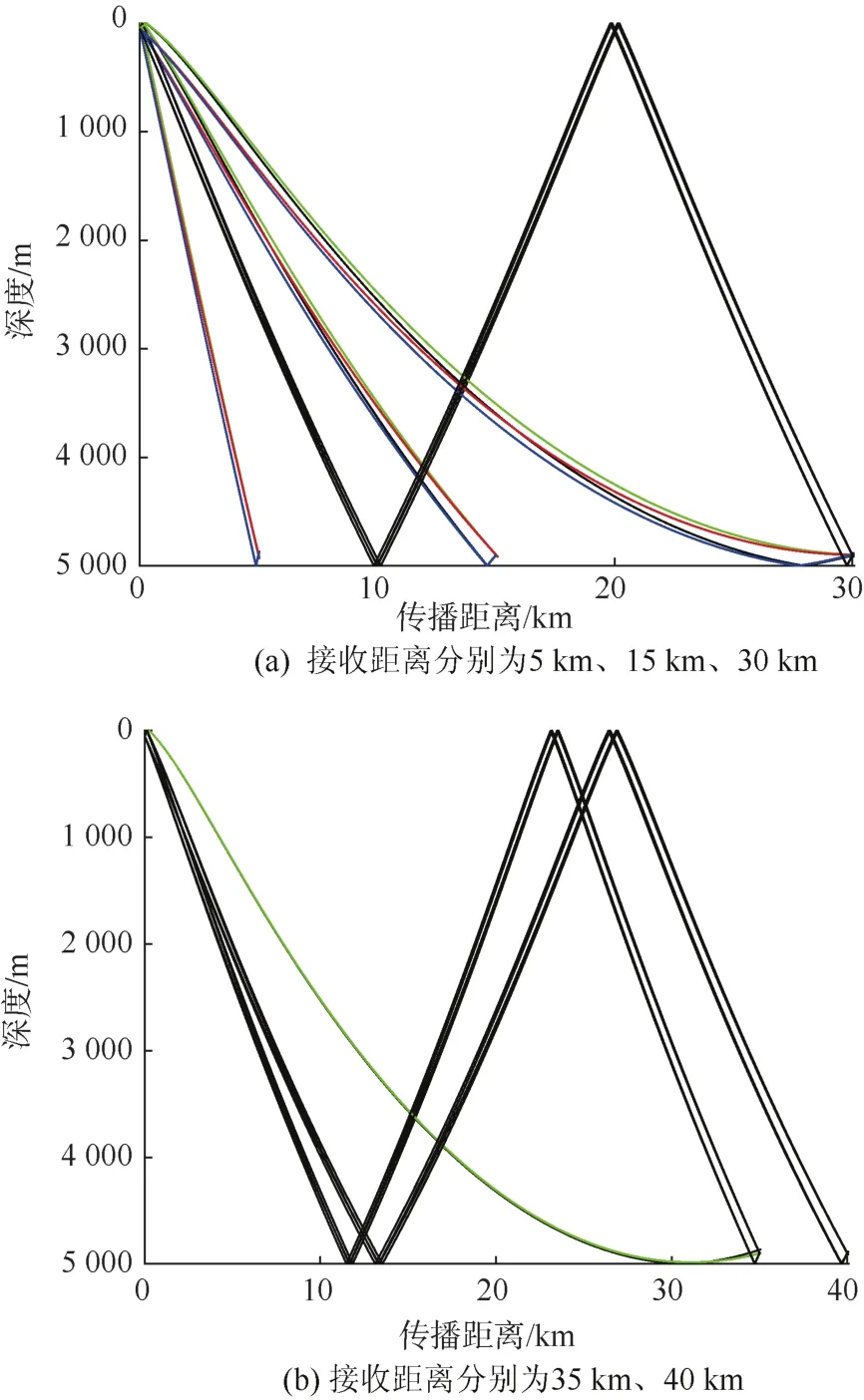
图8 不同接收距离处对应的本征声线Fig.8 Eigen sound rays corresponding to different receiving distances
图8中:红色声线代表直达声线,蓝色声线代表海底反射声线,绿色声线代表海面反射声线,黑色声线代表同时经过海底和海面反射的声线。在图8(a)中可以看出在30 km之内的距离的各个接收点都可以收到直达声线还有海面海底单次反射的声线,但是随着距离的增加,声线逐渐弯曲,而且经过界面的反射次数也在增加;在图8(b)中可以看出,这2个位置接收到的声线的界面反射次数在不断增加,在35 km处海底反射声线和直达声线都不存在了,海面反射声线也发生了明显的弯曲,该距离已经到达甚至超出了可靠声路径分布范围,根据Snell定律,声速梯度的存在会使声线发生折射,产生强烈的弯折,此时只有极少部分能量可以进入接收机,声线幅度很低。在40 km处接收到的只有经过海面海底多次反射的声线,其传播损失较大,此时已经完全脱离了可靠声路径的传播区域。
海洋环境参数设置同图8,图9给出了2个接收位置的声线到达结构,对于每个接收位置都只选取了第一组多途进行观察,因为在仿真的可靠声路径环境下,只有第一组多途能量最高,稳定且容易利用,各多途结构如图10所示。从图9可以看出,在10 km的接收位置,有4种类型的声线,其中直达声线和海面反射声线对声场的贡献最大,能量最强;经过海底反射的声线能量较弱,主要原因是声线在到达海底时,较大掠射角的声线会穿透海底,主要的能量在海底中衰减,只有较小掠射角的声线经过海底的时候会被反射回到水中,经过海底海面多次反射的声线由于几何衰减而变的更弱。

图9 不同接收距离处对应的声线到达结构Fig.9 Corresponding sound ray arrival structures at different receiving distances
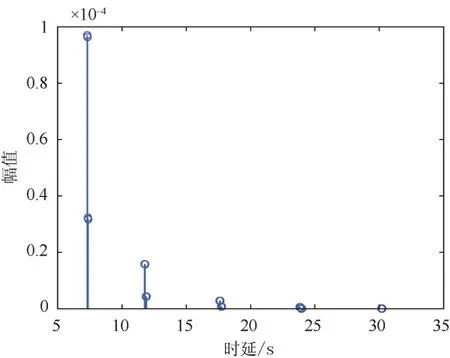
图10 各组多途到达结构Fig.10 Multi-reach structure for each group
3.2 基于RAP的单载波通信性能分析
本节在分析RAP声传播特性的基础上结合单载波时域均衡算法对可靠声路径下单载波通信的有效性进行了仿真验证。
声场的环境参数同图8的仿真,水声信道就是前面仿真分析的 RAP信道,信噪比根据公式SNR=SL-TL-NL得到,其中声源级假设160 dB不变;传播损失根据Bellhop仿真得到;由于远距离声源辐射噪声的出射掠射角较小,无法穿过临界深度到达 RAP信道之内,环境噪声在临界深度以下降低的很快,距离临界深度最深的位置其环境噪声相对于声道轴位置低大约10 dB[8]。在仿真中假设临界深度以下的环境噪声级为50 dB,临界深度以上的环境噪声级为60 dB。
通信系统仿真采用如下参数。采样频率:fs= 4 .8 kHz;载波频率:f0=1 kHz;符号率:Baud = 0 .2 kS/s;映射方式:QPSK;脉冲成型滤波器采用开方升余弦滤波器,滚降系数α=1;同步信号为线性调频信号,其中心频率f0=1 kHz,带宽B= 4 00 Hz,脉宽200 ms,保护间隔Td=200 ms。均衡器结构采用带分数间隔的判决反馈均衡器(采样间隔称为码元间隔的一半),时域均衡算法使用递归最小二乘算法(RLS),仿真发送 10 000 bits数据,其中前2 000 bits数据作为训练序列,用于更新均衡器抽头系数,抽头系数共80个,前后均衡器各40个。数据帧结构如图11所示。

图11 数据帧结构Fig.11 Data frame structure
仿真:声源深度 50 m,接收深度选取 500~4 900 m,每 20 m一个接收,接收水平距离选取15 km,得到的结果如图12所示。

图12 水平距离15 km处对应不同深度的误码率和输出信噪比Fig.12 Bit error rate and output signal-to-noise ratio at different depths with a horizontal distance of 15 km
图12中给出的误码率曲线和接收信号信噪比曲线是经过100次独立的仿真后取平均得到的。根据图12可以看出在在较浅的区域其误码率较大而且输出信噪比也较低。
根据图2(a)可以看出水平距离15 km处的低传播损失区域的边界在2 500 m左右,因此图12(a)中2 500 m以下的区域其误码率几乎都为0,接收信号的信噪比也更高。这里可以看出的是在海深4 200 m左右的位置,误码率曲线有一个突出的峰值,此时误码率量级为10-3,对应的接收信号信噪比也有一个谷值。对谷值处的声场结构进行仿真如图13所示,4 200 m深处和4 700 m深处的声线组成是一样的,且幅度相差很小;不同的是,由于海底的反射路径的不同,在4 200 m接收位置的最大多途时延达到了300 ms,而4 700 m接收位置的最大多途时延仅有100 ms左右。即便如此,该位置的通信效果相对于RAP之外的区域还是较好的。综上,接收位于RAP区域时,其通信误码率都低于10-2,很多位置都是0,接收信号信噪比高出非RAP区域10 dB左右,尤其是在海底附近,通信误码率都是0,输出信噪比高出非RAP区域15 dB左右;接收位于非RAP区域时,其通信误码率平均都在10-1之上。
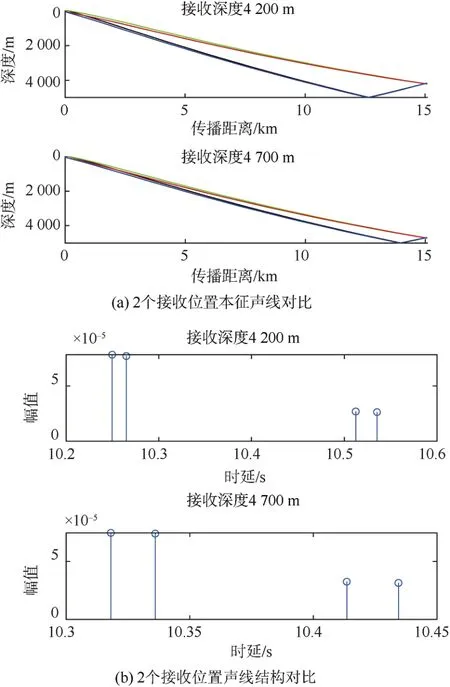
图13 2个接收位置声场对比Fig.13 Comparison of sound fields of 2 receiving positions
接下来进行不同接收位置(同时考虑深度和距离)的通信性能的仿真,进一步分析在可靠声路径下单载波通信算法的性能。
图14中接收深度选取1 000~4 900 m,接收水平距离选取 10~50 km,其中误码率伪彩图是经过100次独立的仿真后取平均得到的。如图14所示,在相同的仿真条件下,RAP分布区域内部的误码率较非RAP区域的误码率低很多,因为在RAP信道内,声线以直达声为主,传播损失低,信噪比高。同时可以看出,通过可靠声路径进行通信时,无误码(误码率低于10-3)通信的通信距离最远可以达到38 km。根据声场互易性,海底布放的通信节点通过RAP信道可以将信息稳健的传输到表层,实现海底-海面之间信息的跨域传输;而且,在RAP信道内,传播损失低,信噪比高,可以适当地降低发射功率,提高信息传输的隐蔽性。

图14 误码率和传播损失随接收深度和接收距离变化Fig.14 Bit error rate and propagation loss varying with reception depth and reception distance
4 结束语
本文在射线模型的基础上对深海 RAP信道的声传播特性进行了研究,分析了海水深度、水平声速变化以及海底介质参数变化对可靠声路径声传播的影响。仿真结果显示,RAP在35 km左右的中远程距离内不存在声影区,海水深度影响低传播损失区域的最大范围,通过可靠声路径传播的声波可以达到更远的距离,同时可靠声路径对声速起伏和界面散射不敏感,信道稳定。然后,针对RAP信道内的声线到达结构以及 RAP信道下跨层通信实施的可行性进行了仿真分析。仿真结果表明:在RAP信道内,直达声能量较强,信噪比高;相同的仿真条件下,RAP区域的通信效果较同距离上浅深度的接收好很多;通过RAP进行通信时,深度余量内的低误码通信距离最远可以达到38 km左右。
通过 RAP通信可以实现海底-海面之间信息的跨域传输,将近海底探测节点的探测结果传输到表层,而且由于RAP区域传播损失小,可以采用低发射功率,实现隐蔽信息传输。本文的研究结果可以为日后的深海信息传输,如海底预置武器的唤醒与遥控等提供技术基础。
猜你喜欢
鸭绿江(2022年10期)2022-10-21
声学技术(2020年6期)2021-01-08
音乐天地(音乐创作版)(2019年10期)2020-01-06
城市道桥与防洪(2019年5期)2019-06-26
测控技术(2018年5期)2018-12-09
测控技术(2018年4期)2018-11-25
优雅(2017年3期)2017-03-09
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
航空学报(2015年4期)2015-05-07
