利用虚拟阻抗及无功电流控制提高光伏故障电压支撑能力研究
2022-11-03 03:27何昭辉曹锐刘海鹏周成
电力电容器与无功补偿 2022年5期
何昭辉,曹锐,刘海鹏,周成
(南瑞集团(国网电力科学研究院)有限公司智能电网保护和运行控制国家重点实验室,南京 211106)
0 引言
随着电网容量不断增加,光伏等新能源发电大规模接入,其间歇性、不稳定性会影响电力系统稳定性[1-2]。尤其是随着光伏并网规模的增大,如何保证电站安全稳定运行,不会因为网侧接地故障引起系统阻抗降低、线路过流,或者故障切除后无功过剩、并网电压骤升等现象,成为最近光伏并网控制领域研究热点[3-4]。
为了提高光伏并网逆变器故障发生和切除后的电压、电流变化应对能力,目前有两类方案,一种是添加主动、被动硬件设备,比如:用无功补偿装置[5]、储能设备[6-7]、Crowbar 电路[8]来稳定电压、限制过流,但这些成套硬件设备使改造成本大幅增加,与本身发电设备之间的协调控制也较为复杂[9-11]。一种是通过改进控制算法实现光伏并网逆变器输出电流限制和并网点电压支撑[12-13]。
文献[14-15]以电网电压不平衡为研究工况,将光伏并网逆变器正序、负序电流分别进行解耦控制,改善并网电流过冲现象。文献[16-17]提出一种基于滑模观测器的复矢量电流环解耦控制策略,该策略可以有效提高光伏并网控制系统电压跟踪能力和抗干扰能力。文献[18-19]采用模型预测有限控制方法,利用并网逆变装置开关离散特性,进行滚动开环优化,实现并网点电压支撑。文献[20-21]将自适应阻尼应用在风机转子励磁控制系统中,用来抑制网侧电压骤升带来的转子电流震荡现象。文献[22-23]从提升光伏并网点功率因数角度出发,通过设置合适控制参数,在网侧故障切除后,保证电流正弦特性良好。文献[24-25]将电网电压升高幅度作为限制条件,通过研究网侧电压和光伏并网逆变器出口电流信息,自适应调节光伏直流母线电压参考值。
目前大多数文献研究故障期间低电压穿越,不考虑故障切除后电压控制,分析故障发生到故障切除全过程光伏故障穿越过程鲜有研究,因此需要开展光伏全过程故障电压支撑能力研究。本文首先建立光伏并网逆变数学模型和控制模型,然后提出一种利用虚拟阻抗及无功电流控制提高光伏故障电压支撑能力的控制方案,在光伏并网逆变器电流控制环节中引入虚拟阻抗来限制网侧电压突变造成的电流越限现象。接着针对故障切除后电压骤升带来的暂态冲击问题,分析有功、无功功率变化情况,提出一种无功电流控制策略来稳定直流母线电压,最后通过Matlab/Simulink 仿真和试验来验证本文所提方法有效性。
1 光伏并网逆变控制模型
光伏并网逆变电路拓扑分为L 型和LCL 型,L型拓扑结构虽然结构简单,但电感参数值较大,且高频段信号抑制能力较弱,本文将LCL 型逆变器拓扑结构作为研究对象,电路拓扑见图1。
图1 中:Udc为直流侧母线电压;Uabc、iabc为逆变器输出交流三相电压、电流;eabc为网侧三相电压;Rf、Lf、Lg、Rg构成LCL 型滤波电路。用L表示线路等效电感(L=Lf+Lg),用R表示线路等效电阻(R=Rf+Rg),根据基尔霍夫电压定律可得


图1 光伏并网LCL并电路拓扑Fig.1 Topology of photovoltaic grid-connected LCL parallel circuit
对三相坐标系下的数学模型进行Park 变换,可以得到光伏并网逆变器在dq 两相坐标系下的数学模型为

并网逆变器电压方程在dq 坐标系下存在交叉耦合项,通常做法是采用前馈解耦控制,将交叉耦合项视为扰动,作为后续电流控制系统中的前馈补偿项。
忽略并网逆变器自身损耗,在电压定向dq 坐标系下有功功率P和无功功率Q为
式(3)中:d轴与电压合成矢量Es为同一方向,ed=Es,eq=0。ed恒定时,id可以控制并网逆变器有功功率和直流母线电压;iq可以控制并网逆变器无功功率。为了实现光伏并网逆变器控制,只需要控制id和iq即可。
在光伏发电并网逆变控制中,电流调节采用PI控制,则传递函数为
式中:Kp和KI分别为电流PI 控制中的比例调节系数和积分调节系数;为电流参考值。
2 虚拟阻抗电压支撑控制
2.1 虚拟阻抗设计
光伏并网逆变器正常工作时,并网点电压准确跟踪电压基准值,即当网侧接地后,线路等效阻抗迅速降低,此时并网点电压变化为
式中,uVd、uVq为发生故障后,线路等效下降阻抗的压降,本文采用虚拟阻抗就是补偿这部分电压降。
虚拟阻抗表达式为

式中,RV、LV为虚拟电阻、虚拟电感。
在dq 坐标系下,虚拟阻抗压降为
为了抑制谐波对虚拟电抗参数的影响,本文在虚拟电抗电压控制中引入低通滤波器对输入电流进行滤波处理,使虚拟电抗仅在低频部分表现电抗特性,则式(7)可变为

式中,ωc.lpf为一阶低通滤波器的截止频率。
2.2 虚拟阻抗幅值分析
网侧短路可分为对称和不对称短路,对称短路即三相短路,此时光伏并网点电压只存在正序分量;不对称短路即单相或两相短路,此时电压还存在负序分量。定义正序电压、电流为uf1、if1;负序电压、电流为uf2、if2,短路等效电路见图2。

图2 短路等效电路Fig.2 Short circuit equivalent circuit
图2 中,光伏并网可等效为恒压源,电压为u,C为并联电容器。正、负序电流计算为

为了求ZV幅值,本文参考电流矢量限幅法,用If1、If2表示if1、if2的幅值,用Ilim表示电流矢量限幅半径。对称短路时If1≤Ilim,不对称短路时If1+If2≤Ilim。联立式(9)可得ZV幅值为

当发生不对称短路故障后,id、iq除了含有正序电流的直流分量外,还叠加了负序二倍振荡分量,If1、If2与id、iq的关系为

2.3 虚拟阻抗比分析
当发生对称短路,光伏并网点等效故障网络见图3。
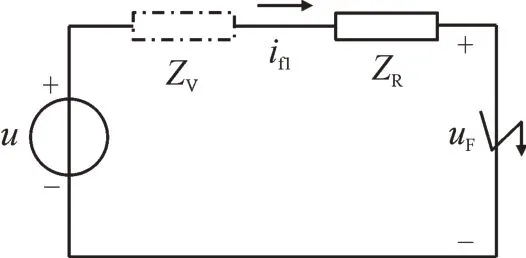
图3 对称短路等效故障网络Fig.3 Symmetrical short circuit equivalent fault network
图3 中,ZR为光伏并网点至短路点线路阻抗,故障点电压UF为

根据式(12)可知,线路参数固定,ZR为定值。为了实现虚拟阻抗补偿后光伏并网点电压最大,令if1=Ilim,此时阻感比为1,虚拟阻抗实部和虚部幅值相等。即
当发生不对称短路,光伏并网点等效故障网络见图4。

图4 不对称短路等效故障网络Fig.4 Asymmetric short circuit equivalent fault network
图4 中,if1=if2,正、负序阻抗相等。正、负序电压与并网点电压关系为

从式(13)可以看出,光伏并网点正、负序电压与ZR、ZV成比例关系。为了抑制负序电压造成的三相电压不平衡,同时虚拟阻抗提供最大电压支撑。当发生不对称短路时,本文根据短路线路的线路阻抗阻感比设置虚拟阻抗阻感比,即设置虚拟阻抗与短路线路的阻感比相同。
3 无功电流稳压控制
光伏发电并网单元工作于最大功率点追踪模式(maximum power point tracking,MPPT),且并网逆变器具有隔离作用,输出有功功率不受网侧线路故障的影响,并始终满足功率平衡。当线路故障切除后网侧电压升高,电流下降,光伏并网点冗余大量容性无功,为了稳定直流母线电压,同时改善网侧电能质量,需要感性无功来平衡冗余容性无功。本文提出一种无功电流稳压控制方案,避免线路故障切除后,电压骤升带来的暂态冲击问题。
故障切除后,光伏并网点电压可表示为

式中:E0为网侧正常状态下电压幅值;α为电压升高比例系数。
光伏LCL 并网逆变器的并联电容器输出无功可表示为

式中:UC、UC0为故障切除后和正常状态下并联电容器端电压幅值;XC为容抗。
电压骤升带来的电容器输出无功可表示为
为了在故障切除后稳定直流母线电压,并保持光伏发电单元一直处于MPPT 模式,有功电流参考值取值范围需满足

式中,IN为网侧额定电流,1.1IN是按照并网逆变器中缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)长时耐受电流整定。
输出有功功率保持不变,标幺值恒为1,即
式中:P0为光伏并网逆变器输出额定有功;Pmax为长时最大输出有功,其与长时耐受电流有关。
取IN(标幺值)=1,求解上式分别可得:α1=1、x2=1.272;α3=0.9、α4=1.35。本文根据α取值,即不同电压骤升幅度设计不同
4 仿真分析
为了验证本文所提控制方案的有效性。在Matlab/Simulink 下搭建如图5 所示的光伏逆变并网仿真模型。该仿真模型中:一个光伏板阵列容量为0.5 WM,两个光伏板阵列各自通过逆变器与一个容量为1 000 kVA 的双绕组分裂式变压器相连,由0.4 kV 升压至10 kV 后接入电网,架空线路选择LCJ-240/40,长度为10 km。

图5 光伏逆变并网仿真模型Fig.5 Grid-connected simulation model of photovoltaic inverter
光伏并网LCL 逆变器参数见表1。

表1 LCL型逆变器仿真参数Table 1 Simulation parameters of LCL inverter
设置仿真时间为3 s、1 s 时电网发生A 相接地短路、三相对称接地短路,故障持续0.9 s、1.9 s 故障切除,网侧电压(标幺值)分别升高至1.26、1.32。采用常规PI 控制和虚拟阻抗及无功电流控制得到光伏并网点母线电压标幺值波形见图6-7。
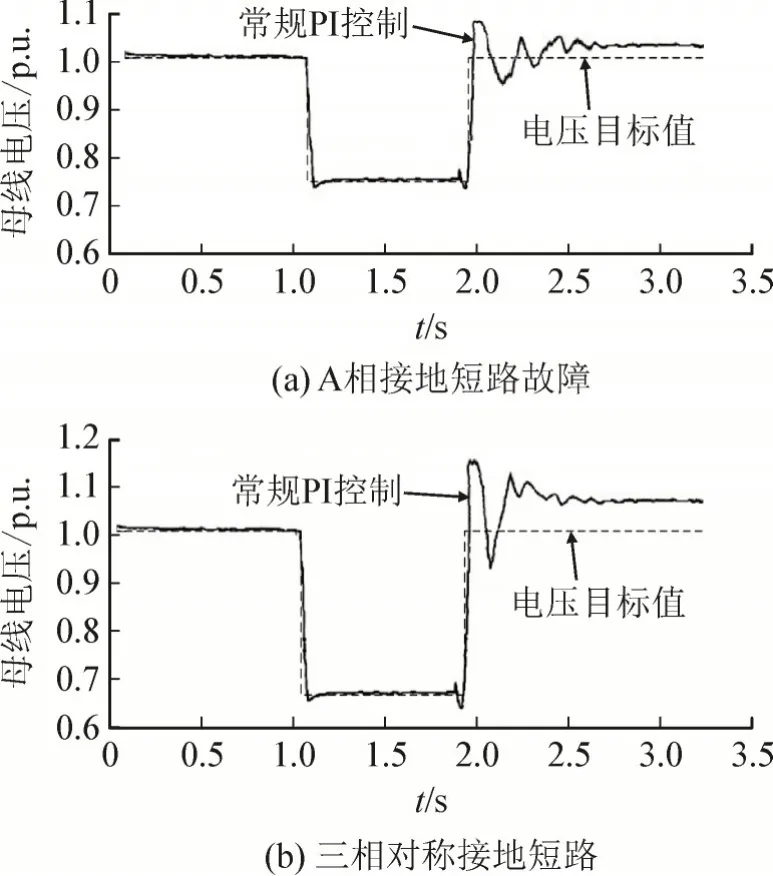
图6 传统PI控制,接地故障前后母线电压仿真波形Fig.6 Simulation waveform of busbar voltage before and after grounding fault with traditional PI control
由图6 可知:当1 s 时刻线路发生A 相接地和三相接地短路故障,采用常规PI 控制得到的母线电压在电压下降时可以跟随电压目标值,但当1.9 s 继电保护动作切除故障后,无法跟随目标电压且有较大的振荡。在图6(a)中:单相接地故障造成母线电压标幺值下降至0.72,电压恢复最高达到1.08,无法恢复至故障前电压;在图6(b)中:三相接地故障造成母线电压标幺值下降至0.65,电压恢复最高达到1.23,振荡现象严重,极易造成光伏设备脱网,最后稳定在1.1 倍母线电压,无过电压恢复能力。
由图7 可知:面对同样1 s 时刻线路发生A 相接地和三相接地短路故障,采用本文所提虚拟阻抗及无功电流控制得到的母线电压在电压下降时因为虚拟阻抗电压支撑作用,可以提高母线电压标幺值,1.9 s 继电保护动作切除故障后,又因为无功电流控制可以稳定母线电压,不会引起暂态过电压。在图7(a)中:单相接地故障,母线电压标幺值由0.72 提升至0.81,故障切除后电压也可稳定在故障前电压;在图7(b)中:三相接地故障,母线电压标幺值由0.65提升至0.72,故障切除后,母线电压迅速恢复至故障前,且振荡现象大大减弱,不会引起光伏设备脱网。
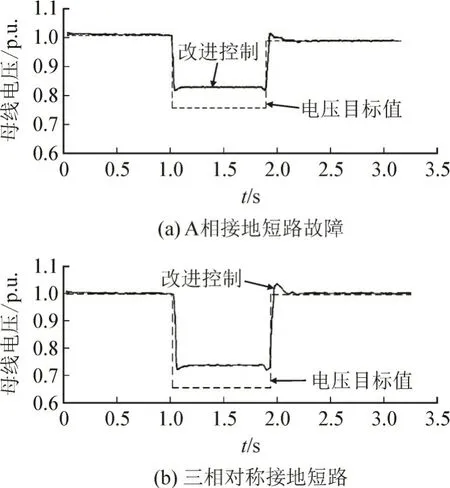
图7 本文所提控制方法接地故障前后母线电压仿真波形Fig.7 Simulation waveform of busbar voltage before and after grounding fault with the method proposed in this paper
图8 为电网发生A 相接地短路、三相对称接地短路故障,光伏并网逆变器控制系统虚拟阻抗介入后,阻抗、感抗变化情况对比图。
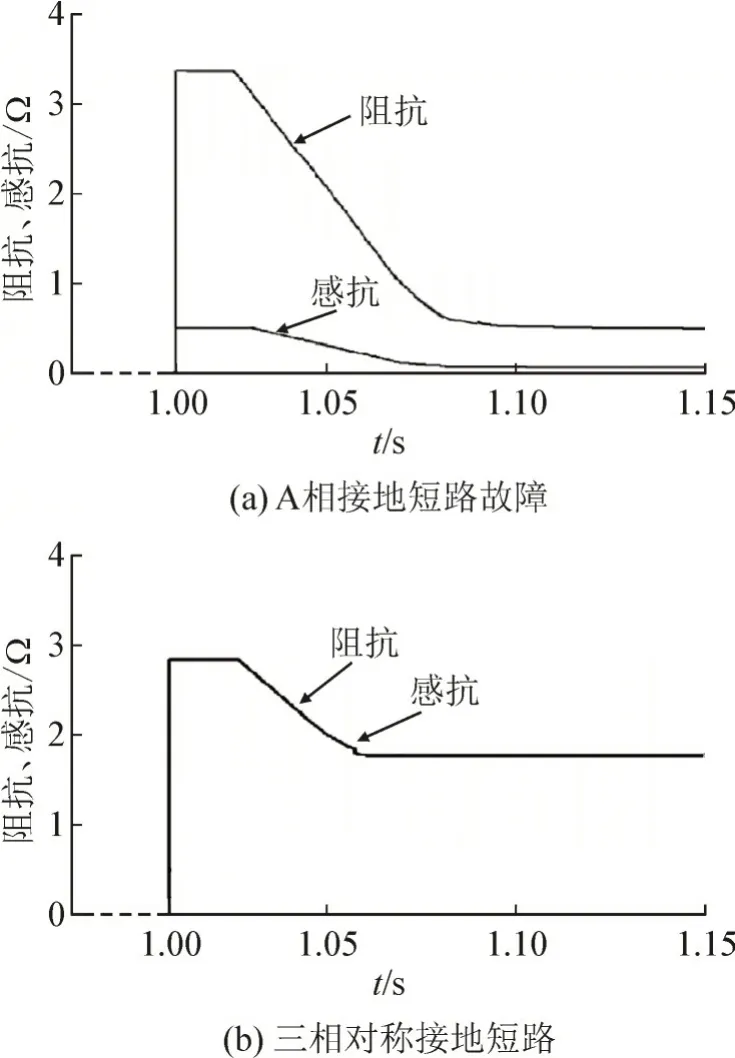
图8 虚拟阻抗变化仿真波形Fig.8 Simulation waveform of virtual impedance variation
从图8(a)可以看出:1 s 时刻发生单相接地短路故障,虚拟阻抗持续0.2 s 恒阻,之后系统动态调节虚拟阻抗,虚拟阻抗阻感比与线路阻抗阻感比相同,并呈线性递减,起到最大支撑故障电压作用。从图8(b)可以看出:1 s 时刻发生三相接地短路故障,虚拟阻抗阻感比始终保持在1,0.3 s 后呈线性递减状态,虚拟电阻与虚拟电抗幅值始终保持相等且始终与目标电压相匹配,起到电压支撑的作用。
图9 为电网A 相接地短路和三相对称接地短路故障切除后,电压恢复阶段采用传统PI 控制和无功电流控制无功功率输出波形。

图9 不同控制方法无功功率对比仿真波形Fig.9 Simulation waveform comparison of reactive power of different control methods
从图9(a)、图9(b)可以看出:2 s 时刻故障切除,传统PI 控制下光伏并网逆变器输出无功功率存在震荡现象,而采用本文所提无功电流控制方法得到的无功功率波形无震荡,且很快稳定。从图9(a)可以看出:切除单相接地故障后,无功功率减少响应母线电压上升,传统PI 控制下无功功率减为0,无功电流控制下无功功率减少至-0.05 Mvar(进相运行,网侧吸收感性无功),结合图6(a)和图7(a),可以看出,为了恢复故障前母线电压,需要从网侧吸收0.05 Mvar 容性无功,传统PI 控制不具备此控制能力。从图9(b)可以看出:切除三相接地故障后,传统PI 控制还是以无功功率减到0 为目标值进行调节,无功电流控制以电压骤升幅度进行调节,最终无功减少至-0.07 Mvar,结合图6(b)和图7(b),可以看出,当三相接地故障切除后,为了恢复母线电压,需要从网侧吸收0.07 Mvar 容性无功,本文所提无功电流控制则可以通过实时调整无功电流参考值很好响应无功动态调节。
5 试验分析
为了验证本文所提基于虚拟阻抗及无功电流控制下的并网点电压支撑动态性能,搭建了DSP+FPGA 的LCL 三相逆变器试验平台,其中DSP 选择TI 公司的TMS320F28335、FPGA 选择Xilinx 公司的Spartan-7以及相关外围电路、IGBT 选择Infineon 公司生产的K40T120、示波器选择Tektronix 公司的MDO4104B-3型示波器,试验参数与仿真参数相同。
图10 和图11 为发生A 相短路接地故障、三相短路接地故障,分别采用常规PI 调节方法和本文所提控制算法得到的并网点三相电压和和电流波形。

图11 采用改进控制,A相短路接地并网点电压电流波形Fig.11 Voltage and current waveform of the short circuit grounding grid-connected point of phase A by adoption of improved control
从图10 可以看出:当发生单相短路后,采用常规PI 控制得到的电压、电流A 相波形幅值变化明显。从图10(a)可以看出:A 相电压波形在发生短路故障后下降幅度较大,只能达到0.52 p.u.,故障切除后也无法恢复至额定电压,且波形暂态特性较差,毛刺较多。从图10(b)可以看出:A 相电流波形在发生短路故障后上升幅度较大,最大达到1.31 p.u.,波形畸变率高,逆变器输出电能质量较差。
从图11 可以看出:采用本文所提出的基于虚拟阻抗及无功电流控制下的并网点电压支撑方案当发生单相短路后,A 相电压、电流波形幅值变化范围较小,从图10(a)可以看出:A 相电压幅值减小,但可保持在0.72 p.u.水平,B、C 相电压基本保持不变,当故障消除后三相电压又达到平衡。从图10(b)可以看出:故障期间A、B、C 相电流基本对称,幅值增长满足额定电流限制,故障消除后,很快恢复至系统额定运行,且波形畸变率低,逆变器输出电能质量高,满足规程要求。
6 结语
针对网侧发生接地故障,光伏并网逆变器从故障发生到故障切除全过程,本文提出一种基于虚拟阻抗及无功电流控制的光伏并网逆变器电压支撑方案,引入虚拟阻抗来起到故障期间电压支撑作用,采用无功电流控制来稳定并网点母线电压。
通过仿真和试验验证了本文所提出虚拟阻抗控制中的虚拟阻抗幅值与虚拟阻感比设置合理,可以保持始终与目标电压相匹配,起到电压支撑的作用。所提出的无功电流控制可以通过实时调整无功电流参考值很好地进行无功动态调节。本文所提方法具有一定的理论参考和工程应用价值。
猜你喜欢
四川电力技术(2022年6期)2023-01-30
今日农业(2022年16期)2022-09-22
上海大中型电机(2021年2期)2021-07-21
印刷工业(2020年4期)2020-10-27
山东电力高等专科学校学报(2019年5期)2019-11-01
西南交通大学学报(2018年6期)2018-12-18
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
中国设备工程(2017年24期)2017-12-28
现代金融(2016年7期)2016-12-01