
基于电流优化的双三相PMSM开路故障容错控制*
2022-11-03 05:18孟祥硕肖玲斐王国强朱晓倩
电机与控制应用 2022年10期
孟祥硕, 肖玲斐, 王国强, 朱晓倩
(南京航空航天大学 能源与动力学院,江苏 南京 210016)
0 引 言
多相永磁同步电机(PMSM)凭借结构简单、运行可靠以及功率密度高等优点在电动汽车[1-2]、船舶推进[3]和航空航天[4-5]等大功率、高精度领域得到了广泛的应用。其中,双三相PMSM是由2套中性点相互连接或隔离、相位差30°的绕组组成的,在输出相同功率的条件下,其供电电压仅需三相PMSM的一半,成为了低压大功率场合的主流设备。
考虑到双三相PMSM工作环境的特殊性以及电机相数的增加,绕组发生开路故障的可能性会增大。当多相电机的一相或者几相出现故障时,可以采取适当的策略,使电机在断相的情况下继续运行,无需重新启动或停机。因此,多相PMSM的容错控制方法成为研究的热点[6-9]。其中,文献[6]基于保持故障后基波磁动势和永磁体基波磁链矢量在空间上圆形旋转的原则,构造了五相PMSM在一相开路时同步坐标系下的数学模型。文献[8]构建了一种基于正常解耦变换阵的缺相容错控制策略,分别对定子铜耗最小和转矩输出最大两种优化电流工作方式进行分析。
目前多相PMSM的断相故障容错控制方法大致可分为降维解耦矢量控制和最优电流给定控制两类。前者通过建立故障状态下的数学模型,重构控制策略实现容错控制,但缺乏统一的故障模型,同时也会改变原本的控制结构;后者根据定子铜耗最小原则或者转矩输出最大原则求解各相绕组最优容错电流的相参考值,但无法提供平滑的转矩和转速切换,平均转矩可能会降低。
随着现代控制理论的不断发展,智能优化算法在多相PMSM的容错控制领域也逐渐开始得到应用,文献[10]提出了一种具有非对称隶属函数的Takagi-Sugeno-Kang型模糊神经网络,用于六相PMSM驱动系统的容错控制。考虑到开路故障造成的转矩脉动是周期性的,文献[11]将迭代学习控制作为一种电流控制技术,用于恢复故障条件下多相PMSM驱动器的性能。文献[12]考虑断相故障下的永磁转矩和磁阻转矩,建立了一种综合模型,并采用遗传算法优化定子电流。灰狼优化(GWO)[13]算法是受到自然界中灰狼群体狩猎行为的启发而提出的一种群智能优化算法。其凭借结构简单、参数较少、兼顾寻优阶段的探索与开发过程等优点得到了广泛的应用[14-16]。
传统GWO算法中的收敛因子线性递减,以此来模拟狼群从包围到捕食猎物的行为。这种机制导致前期所有个体都进行大范围搜索,局部探索能力差,收敛速度慢,因此初始种群的生成对后续的寻优效率起着关键作用;后期所有个体在局部进行小范围搜索,忽略了周围可能存在的全局最优解,所以后期需要兼顾算法的局部与全局寻优能力,尽量避免陷入局部最优。
综上所述,针对双三相PMSM一相开路故障中传统容错控制方法控制结构复杂的缺点,本文提出一种基于电流优化的容错控制方案。从传统的坐标变换矩阵出发,推导出一种解耦的同步旋转坐标变换矩阵,建立故障模型,分析造成平均转矩下降以及转矩脉动的原因,将开路故障下的容错控制问题转换为d、q轴参考电流优化问题。针对传统GWO算法初始种群分布不均匀、易陷入局部最优的缺点,本文提出一种Kent映射-粒子群-GWO(KPGWO)算法优化d、q轴参考电流,保证获得最大平均转矩的同时,转矩脉动最小。所提控制方案不会改变原本的控制结构,可以实现正常状态与故障状态之间的平滑切换。
1 解耦同步旋转坐标系下双三相PMSM故障模型
双三相PMSM在传统的同步旋转坐标变换矩阵下的电感矩阵存在耦合。本节从双三相PMSM的定子电感矩阵出发,利用Park变换推导出一种可使其解耦的同步旋转坐标矩阵,为后续故障状态下参考电流的求解提供便利,最后给出该坐标变换矩阵下双三相PMSM的数学模型与一相开路故障模型,分析了造成转矩脉动的原因。
1.1 定子电感矩阵
双三相PMSM在自然坐标系下的电压方程为
(1)
磁链方程为
ψ6s=L6si6s+λ6sψf
(2)
式中:λ6s为磁链系数;ψf为永磁体磁链。
定子电感矩阵为
(3)
电磁转矩方程为
(4)
式中:p为电机的极对数;θm为转子位置机械角度。
在转子磁结构各向异性的假设下,定子自感和互感是转子位置电角度θe的函数。此外,假设三相绕组的几何和电磁不对称性以及饱和效应可以忽略不计,那么每相绕组的自感可以表示为
Lii=LAAl+Ls0+Ls2cos 2θei
(5)
式中:i=A,B,C或i=U,V,W;LAAl为漏自感;Ls0=(LAAd+LAAq)/2为主自感平均值;Ls2=(LAAd-LAAq)/2为二次谐波幅值;LAAd和LAAq为绕组d、q轴主自感;θei为i相绕组相对于d轴的电角度。
类似于式(5),同一套绕组不同相之间的互感可以表示为
Mij=Ms0+Ms2cos(θei+θej)
(6)
式中:i,j=A,B,C或i,j=U,V,W,i≠j;Ms0=-Ls0/2;Ms2=Ls2;θej为j相绕组相对于d轴的电角度。
除了同一套绕组的每相自感和不同相之间的互感外,还必须考虑两套绕组不同相之间的互感。两套绕组之间的互感为
Mij=Mm0cos(θei-θej)+Mm2cosγij
(7)
式中:i=A,B,C;j=U,V,W;Mm0=Ls0;Mm2=Ls2。
其中,
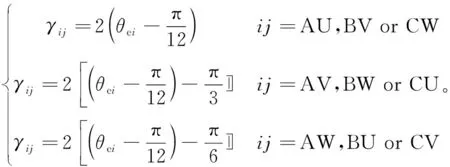
(8)
因此,双三相PMSM的定子电感矩阵为
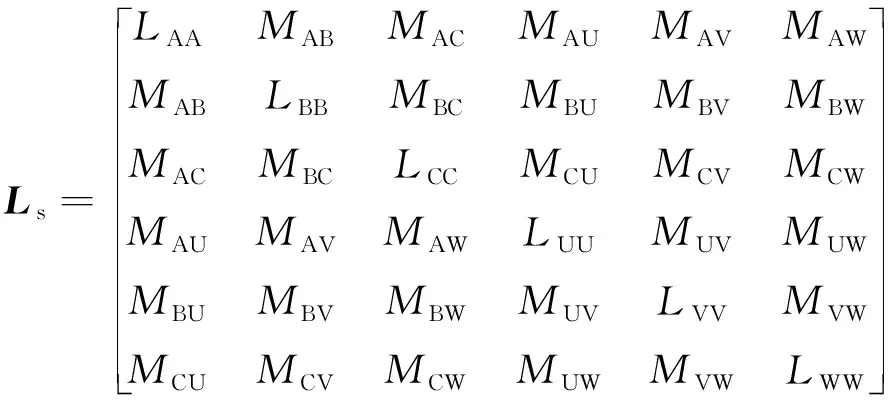
(9)
1.2 矩阵变换
对于三相PMSM,利用Park变换可以将各物理量从自然坐标系A-B-C变换到同步旋转坐标系d-q下,变换矩阵:
P(θe)=
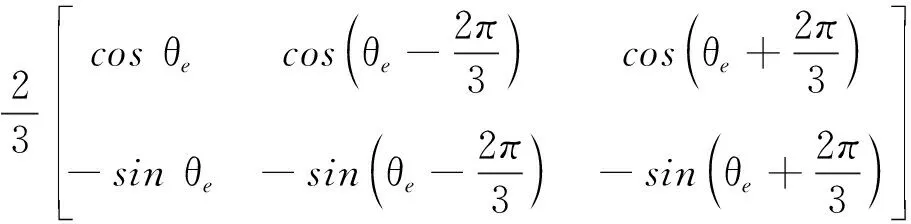
(10)
对于双三相PMSM,则可以利用两个Park变换矩阵,将各物理量从自然坐标系A-B-C-U-V-W变换到同步旋转坐标系d-q1和d-q2下,具体的变换矩阵为
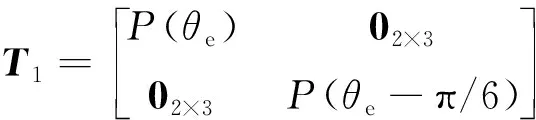
(11)
对定子电感矩阵式(9)进行变换,可以得到
(12)
从式(12)可以看出,电感系数矩阵并不是对角矩阵,两套绕组的d轴和q轴电感之间仍有耦合,这种耦合关系通过耦合电感Md和Mq表现出来。
为了进一步消除这种耦合关系,下面引入变换矩阵T2:

(13)
对电感矩阵LT1做进一步的变换,可以得到:
(14)
式中:Ld1=Ld+Md=3LAAd+LAAl为电感的d1轴分量;Lq1=Lq+Mq=3LAAq+LAAl为电感的q1轴分量;Ld2=Ld-Md=LAAl为电感的d2轴分量;Lq2=Lq-Mq=LAAl为电感的q2轴分量。
最终的坐标变换矩阵为
Tdq=T2T1=

(15)
在坐标变换矩阵式(15)下,双三相PMSM在d1-q1子空间的电压方程为
(16)
式中:ud1和uq1分别为定子电压的d1、q1轴分量;id1和iq1分别为定子电流的d1、q1轴分量。
d1-q2子空间的电压方程为
(17)
式中:ud2和uq2分别为定子电压的d2、q2轴分量;id2和iq2分别为定子电流的d2、q2轴分量。
电磁转矩方程:
Te=3p[ψfiq1+(Ld1-Lq1)id1iq1]
(18)
特别地,本文分析的是表贴式PMSM,其满足Ld1=Lq1,因此,id1的参考电流通常被设置为0。此外,id2和iq2对电磁转矩的产生没有任何贡献,反而会增加定子铜耗,为了提高电流利用效率,id2和iq2的参考电流也被设置为0。
1.3 故障模型
假设第二套绕组的W相发生开路故障,记故障状态下的电流向量为

(19)
d-q子空间的电流为

(20)
在故障情况下,双三相PMSM第二套绕组的各相电流应满足:
(21)
同时,剩余健康相的电流应尽量控制为正弦波形,从而减小其中的谐波含量,以降低谐波损失。因此,对第一套绕组的各相电流施加约束,使其与正常状态下的相电流相等:

(22)
利用坐标变换矩阵式(15)对故障状态下电流式(19)进行坐标变换,根据约束条件式(21)和式(22),可以得到:

(23)
类似于式(22),控制U相的幅值IU和相位φU,使其满足:
iUf=IUcos(θe-φU)
(24)
那么故障状态下的电磁转矩:
(25)
定义
Tef=Te0+Te2
(26)
从式(26)可以看出,与正常状态下的电磁转矩相比,故障状态下电磁转矩减小,同时相电流中二次谐波的存在会造成转矩脉动。
2 基于一种改进GWO算法的电流优化容错控制
基于故障模型,推导出了故障状态下的d、q轴参考电流,将开路故障的容错控制问题转换为参考电流的优化问题。为了在获得最大平均转矩的同时,能够保证转矩脉动最小,采用一种改进GWO算法进行参考电流的多目标寻优。
2.1 问题描述
假设d-q子空间电流和故障状态下的U相电流满足:

(27)
式中:Id1,0和Iq1,0为基波幅值;Id1,2、Iq1,2为二次谐波分量的幅值;φd和φq为二次谐波分量的相位角。
代入式(23),可以得到:
(28)
容错控制方案是通过优化故障状态下d-q子空间的电流,使电磁转矩的平均值最大,同时脉动最小。表贴式PMSM通常采用Id1,0=0的矢量控制方法,Iq1,0可以通过负载转矩的大小来确定。因此,可以通过优化二次谐波分量的幅值Id1,2、Iq1,2和相角φd、φq,以及U相电流的幅值IU和相位φU,获得最大平均转矩,同时使转矩脉动最小。
至此,将双三相PMSM在一相开路故障状态下的容错控制问题转化为了d、q轴参考电流的多目标优化问题。下面提出一种KPGWO算法解决该多目标优化问题。
2.2 基于KPGWO算法的电流优化
2.2.1 KPGWO算法
传统的GWO算法模拟狼群的狩猎行为,主要分为包围、逼近和捕食3个环节。
首先,狼群包围猎物这一过程的数学描述为
D=|C·Xp(t)-X(t)|
(29)
X(t+1)=Xp(t)-A·D
(30)
式中:D为个体与猎物间的距离向量;X为灰狼的位置更新向量;t为目前的迭代代数;Xp为猎物的位置向量;A=2a·r1-a和C=2·r2为系数向量;a为收敛因子;r1和r2的模取[0,1]之间的随机数。
其次,狼群逼近猎物这一过程的数学描述为
(31)
式中:Dα、Dβ和Dδ分别表示3只头狼α、β和δ与其他个体间的距离;Xα、Xβ和Xδ则表示其当前的位置;C1、C2和C3表示随机向量;X为当前灰狼的位置。
(32)

(33)
式(32)分别定义了狼群中ω灰狼个体朝向α、β和δ前进的步长和方向,式(33)定义了ω个体的最终位置。
最后,狼群进行捕食的行为数学描述为随着迭代次数的增加,a从2减小到0。当|A|>1时,狼群比较分散,算法开始进行全局搜索;当|A|≤1时,狼群集中对猎物进行攻击,即算法进行局部寻优。
针对传统的GWO算法随机初始种群分布不均匀、易陷入局部最优等缺点,做出以下改进。
(1) 引入Kent混沌映射。混沌映射在一个区间内往往能够遍历但不重复地包含所有点,因此在智能优化算法中得到了广泛的应用。相比于传统的Logistic混沌映射,Kent混沌映射具有更加良好的遍历均匀性,所以利用Kent混沌映射产生的初始灰狼种群分布更加均匀,其数学表达式为
xi(t+1)=

(34)
式中:xi(t)表示第i个个体在第t代的位置;α为控制参数,α∈(0,1),当α=0.4时,其概率密度函数在(0,1)内均匀分布。
(2) 融合粒子群算法个体保留机制。传统GWO算法只考虑了种群中适应度最好的3只头狼的引导作用,忽略了其他灰狼个体本身的搜索能力,容易导致算法沿着某个方向陷入局部最优,降低寻优效率。除3只头狼以外,ω灰狼个体在历次迭代过程中必然存在一个最优值,因此可以通过这个最优值来指导灰狼个体进行自我搜索。受到粒子群算法的启示,可以通过保留最优个体来保证其他灰狼个体的搜索能力,从而降低算法陷入局部最优的概率。
在式(33)位置更新的基础上,再引入粒子群算法的种群个体位置更新公式:
X′i(t+1)=Xi(t+1)+r·[Xibest-Xi(t+1)]
(35)
式中:r为[0,1]之间的随机数;Xibest为第i个体在t代内的最优位置。
(3) 引入局部收敛破坏机制。在GWO算法迭代寻优过程中,当最优解在连续多次迭代都没有更新的情况下,可以认为算法存在停滞收敛的可能,或者说目前取得的最优解是一个局部最优解。具体实现过程中,可以通过停滞更新叠加环节来记录这一过程。一次迭代结束之后,如果最优解没有更新,停滞更新次数加一,反之清零,继续迭代寻优,直到达到最大迭代次数。当停滞更新次数达到阈值时,说明现在获得的解可能是全局最优解,但更有可能是现有个体不具备继续寻优的能力,即算法陷入了局部收敛的情况。
综上,所提KPGWO算法流程图如图1所示。
2.2.2 基于KPGWO算法的多目标优化
式(28)中,待优化的参数记为

(36)

两个优化目标可表示为

(37)
适应度函数选择为

(38)
式中:α1和α2为大于0的加权因子,其值越大表明对相应的性能指标越重视。
为了保证故障状态下电机输出转矩也能匹配负载转矩的需求,容错控制的目标是在获得最大平均转矩的前提下,转矩脉动最小,因此α1需要比α2大,最终F的值越小,说明当前个体的适应度越好。本文所提控制方法的控制框图如图2所示。由图2可以看出,该方法不涉及对原本的磁场定向控制系统结构的任何更改,在原有控制结构的基础上,当发生开路故障时,只需切换d、q轴参考电流即可实现故障状态下的容错控制。
3 仿真验证与分析
3.1 KPGWO算法验证
为了验证KPGWO算法所采用的Kent混沌映射相较于随机初始化以及Logistic混沌映射所得到的初始种群分布更为均匀,首先利用rand函数直接随机生成一个50×50的随机种群。然后取随机种群矩阵的第一行作为混沌种群的初始值,按照Kent映射公式迭代1 000次,取最后50行得到一个50×50的混沌种群,并采用同样的方式生成一个Logistic映射种群。最后利用一种有限集点分布均匀性度量方法[17]分别计算3种种群的分布均匀度值。为了减小结果的偶然性,3种方法按照上述步骤分别生成4组种群,计算结果如表1所示。

表1 种群分布均匀度值
表1的结果表明Kent混沌映射所得到的初始种群的均匀度指标更小,说明其比随机初始化种群与Logistic混沌映射种群的分布更加均匀。
此外,为了验证KPGWO算法的迭代速度与收敛精度,采用一个最小值为0的二阶经典多峰函数Rastrigin作为目标函数,取值范围为[-5,5],迭代次数为50次,测试其迭代寻优速度。同时,对比经典的遗传算法(GA)和传统的GWO算法,迭代寻优过程如图3所示。
由图3可以看出,所提KPGWO算法的迭代收敛速度明显快于其他2种方法,同时收敛精度高,没有陷入局部最优的情况。
3.2 一相开路故障下容错控制验证
在MATLAB/Simulink中搭建仿真模型,双三相PMSM采用的参数如表2所示。

表2 双三相PMSM参数
设定电机目标转速为6 000 r/min,负载转矩为15.9 N·m,直流侧电压为380 V,开关频率为20 kHz。转速环的PI参数为0.04和0.58,d1-q1子空间电流环PI参数为20和10,d2-q2子空间电流环的PI参数为10和5。仿真时间为1 s,其中0~0.4 s为正常状态,0.4 s时W相发生开路故障,0.8 s切换到容错控制方案下运行。
正常状态下电机d-q子空间电流与各相电流的变化情况如图4所示,可以看出,定子电流的大小与参考值相符;各相电流不存在明显的谐波畸变,2套绕组各相电流幅值之间的相位差符合实际情况。
电机转速与转矩变化情况如图5所示。电机转速达到了目标转速,响应速度快,没有出现超调;转矩变化平稳,没有出现较大幅度的转矩脉动。
0.4 s时发生开路故障,从图6可以看出W相电流变为0,转速与转矩出现了明显的突变,稳定后转速在5 993~6 008 r/min-1之间波动,转矩在10.42~21.55 N·m之间波动。
0.8 s时切换到容错控制,KPGWO算法选取的种群数量为50,迭代次数为300,停滞更新阈值为10,Id1,2、Iq1,2和IU的寻优范围分别为[0,10]、[0,50]和[0,60],Iq1,0的值为34.25 A。取适应度函数的参数α1为100,取参数α2为1,迭代结束后得到其适应度函数变化情况如图7所示。
最终得到的最优参数值为
此时,d、q轴电流的参考值与各相电流的变化情况如图8所示。
容错运行状态下电机转速与转矩变化情况如图9所示,同时与传统的降维矢量容错控制方法[18]相比,可以看出本文所提出的方法在转速与转矩变化过程中的波动明显更小。
4 结 语
本文针对双三相PMSM一相开路故障,提出了一种基于电流优化的容错控制方案,主要结论如下。
(1) 针对双三相PMSM的数学模型在传统同步旋转坐标系下存在交叉耦合的问题,推导出一种解耦的同步旋转坐标变换矩阵,并建立一相开路故障模型。经分析,d、q轴电流以及相电流中的谐波分量是造成转矩脉动的原因,在此基础上将容错控制问题转换为参考电流的优化问题。
(2) 针对传统灰狼优化算法初始种群不均匀、易陷入局部最优的情况,提出了一种KPGWO算法,用于d、q轴参考电流参数的寻优,算例与仿真的结果证明了该方法的优越性。
(3) 本文所提方法不会改变系统原本的控制结构,可以实现正常状态与故障状态之间的平滑切换,与传统方法的对比证明了该方法的有效性。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
防爆电机(2022年4期)2022-08-17
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年3期)2022-06-17
防爆电机(2021年6期)2022-01-17
水下无人系统学报(2021年6期)2022-01-15
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
防爆电机(2021年1期)2021-03-29
电子制作(2019年23期)2019-02-23
