
现代有轨电车运行速度管理研究
2022-11-02 12:25:38赵晓峰徐正良金建飞顾华强刘宏祥
电气自动化 2022年5期
赵晓峰, 徐正良, 金建飞, 顾华强, 刘宏祥
〔1.上海电气自动化设计研究所有限公司,上海 200023;2.上海市城市建设设计研究总院(集团)有限公司,上海 200125〕
0 引 言
现代有轨电车是与道路上其他交通方式共享路权的中低运量城市轨道交通方式,线路通常设在地面,依靠司机瞭望驾驶[1]。这种情况下,速度是有轨电车运行安全最关键性的风险因素,很多设计和功能都基于运行速度来开展和实现。
1 运行速度分类
有轨电车运行速度,按施工专业划分有线路、轨道、车辆、供电和信号等类别[2]。按使用方法分为静态和动态,即有轨电车运行过程中保持不变并直接使用的是静态速度,而根据列车实时状态不断变化并需计算的为动态速度。轨道区段数据库列于表1。
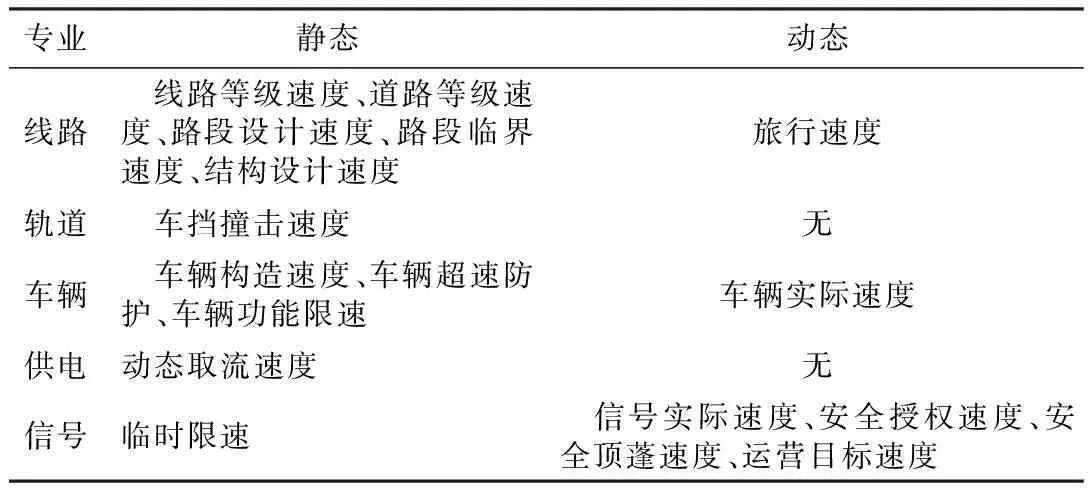
表1 轨道区段数据库
线路等级速度是综合运营需求、线路条件和投资效益等确定的有轨电车速度,不超过70 km/h。
道路等级速度是按道路网中地位、交通功能及沿线服务功能确定的机动车速度,有轨电车共享路权时,相应路段设计速度需比较该速度,取较小值。
路段设计速度是在确保行车安全和舒适性前提下,期望列车持续运行的速度,包括:平直道取线路/道路等级速度;弯道由曲线半径、缓和曲线及超高确定;道岔直向同平直段,侧向按道岔型号规定,常用6号和3.26号侧向通过速度20 km/h,而浅槽设计道岔为15 km/h;车站一般不设站台门,通过速度40 km/h;平交路口通过速度不超过40 km/h,遇弯道或道岔,取相关限速最小值。
路段临界速度是在确保行车安全前提下,列车不可超过的速度,包括:平直段取设计速度加7 km/h;曲线段取设计速度加10 km/h;道岔直向同平直段,侧向取通过速度加3 km/h;车站和路口临界速度均为45 km/h。
结构设计速度是土建及附属结构设计时采用的列车运行速度,通常为设计速度加10 km/h。
旅行速度是列车在整个线路上正常运行的平均速度,根据车辆动力性能、线路及车站和交叉口信号延误等综合确定,不宜小于20 km/h[3]。
车挡撞击速度是轨道终端设备能承受的车辆撞击产生冲击荷载的换算速度,高架25 km/h,地下15 km/h;地面和车场5 km/h。
车辆构造速度是受车辆安全及结构强度等条件限定的,能持续稳定运行的最高速度不小于线路等级速度的1.1倍,取80 km/h。
车辆超速防护是因车辆限速失效,超出目标速度而实施的控制,取线路等级速度加8 km/h。
车辆功能限速是在不同工况下的运行速度。紧急牵引不超过30 km/h,洗车3~5 km/h,倒车10 km/h,牵车连挂不超过3 km/h。
车辆实际速度是通过电子制动控制单元采集非动力转向架上的多个速度传感器数据得到的实时平均速度,同时进行滑行检测。
动态取流速度需架空充电轨的结构强度满足储能式有轨电车40 km/h进出站动态充电要求。
信号类速度与安全驾驶密切相关,涉及在线动态计算,过程和含义较为复杂。
2 实际速度管理
信号实际速度是信号车载主机通过各类传感器和外部接口等采集的实时速度,根据运行环境和工况综合判定和补偿。典型车载设备如图1所示。

图1 典型车载信号设备架构图
实际速度信号来源包括:车辆系统TCMS主机,卫星导航接收机和天线,障碍物检测主机以及雷达天线[4]。
2.1 惯性导航速度
原始的惯性导航速度来自速度传感器的脉冲数据。早期项目的信号专业往往单独安装测速设备,现在则采用车辆系统提供的实时速度。
车辆TCMS主机通过车载交换机承载的以太网与信号车载主机连接,使用UDP协议,通信周期100 ms。车辆发送的列车当前速度是车辆制动系统的综合速度(km/h),已经过去噪滤波、防滑补偿处理,信号能直接使用。但是当车辆TCMS主机在与车载交换机连接前设置独立远程处理模块RIOM时,发送的速度有一定时延,此时需额外发送车辆行驶总里程作为信号实时测距的补充。
除上述信息外,车辆还发送司机室激活状态、牵引/制动/紧急制动状态、车门状态、电池/电容状态、设备故障和火灾报警等。
2.2 卫星导航速度
原始的卫星导航速度来自车载安装的接收机和天线,通过网口或串口与信号车载主机连接,通信周期设为100~1 000 ms。
两者通信交互采用国家航海电子协会NMEA 0183协议,数据格式选用GPRMC,内容包括时间戳、经度、纬度、速度、方位角、磁偏角、工作模式和校验等。卫星导航速度单位为kn(节),需乘以1.852转换为km/h。
路测时发现,除启动后的初始寻星阶段有少许偏差外,卫星导航速度均较为准确。
2.3 雷达检测速度
障碍物检测主机及毫米波雷达天线提供雷达检测速度[5],通过串口与信号车载主机连接,波特率115 200,列车速度格式如表2所示。
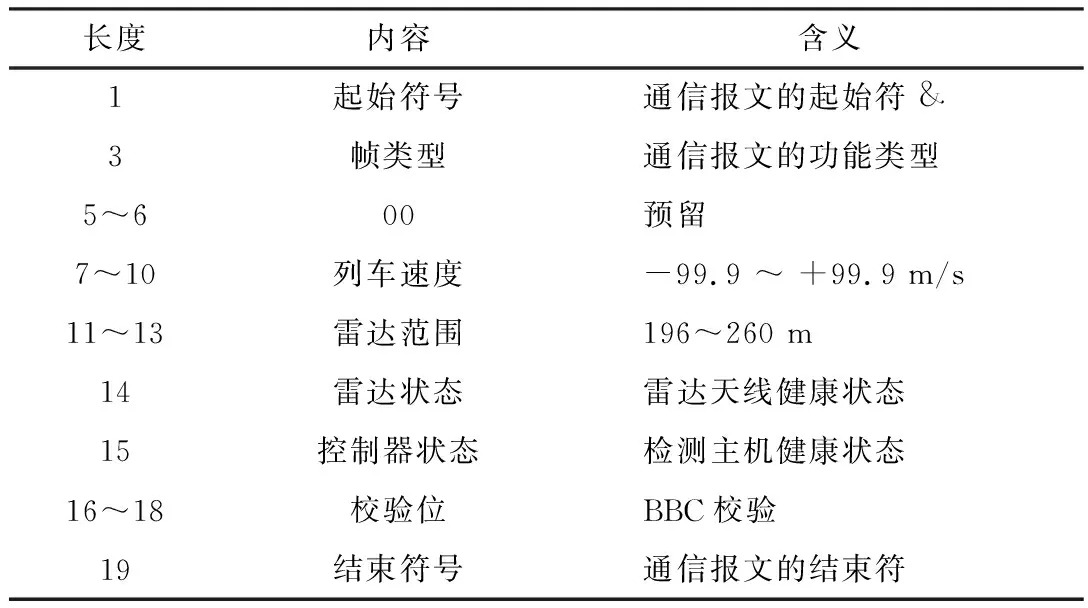
表2 雷达检测速度格式
检测主机的列车速度报文发送周期为500 ms,可用于惯性导航速度的校准。
2.4 速度判定
车辆上电启动后,信号车载主机与车辆TCMS主机和障碍物检测主机建立通信,获取原始的列车实际速度。由于存在多个原始数据来源,还需进行判定和处理如下。
(1) 当两个原始速度的较大者≥5 km/h,且两者差值>4 km/h 时,原始速度无效。
(2) 当两个原始速度的较大者≥5 km/h,且两者差值>2 km/h 并持续至少1 s时,原始速度无效。
(3) 当两个原始速度判定有效时,列车实际速度取两者的平均值,即已处理速度。
(4) 当本次应用周期已处理速度大于10 km/h,且和上周期的差值≥0.28 m/s 时,已处理速度无效。
上述已处理速度还用于计算运行距离,同时根据激活的司机室、控车手柄档位和信标读取器检测的两个连续信标及线路数据库判定实际运行方向。
3 目标速度管理
信号目标速度主要用于有轨电车的司机辅助驾驶,包括闯禁止信号机报警和超速提醒等,其计算的前提是安全授权速度。
3.1 安全授权速度
安全授权速度是司机应当按压紧急制动按钮时的最高速度,通常大于等于运营目标速度。安全顶蓬速度是紧急制动触发后达到的最高速度,考虑线路坡度、车辆牵引/制动延时特性等因素,通常略高于安全授权速度。二者均基于轨道交通安全制动模型计算得到,具体使用时安全授权速度还需和路段临界速度、车辆功能限速比较,取最小值。
有轨电车的安全制动模型[6]如图2所示,分为五个阶段:A为司机反应时间,取2~6 s;B为紧急制动触发后撤除牵引时间;C为牵引切除后到开始施加紧急制动的过渡保护时间,通常为1 s,在此阶段,如果列车在下坡,实际速度还会稍有增加,此时达到安全顶蓬速度;D为紧急制动0~100%建立时间;E为最大保证紧急制动率施加时间。
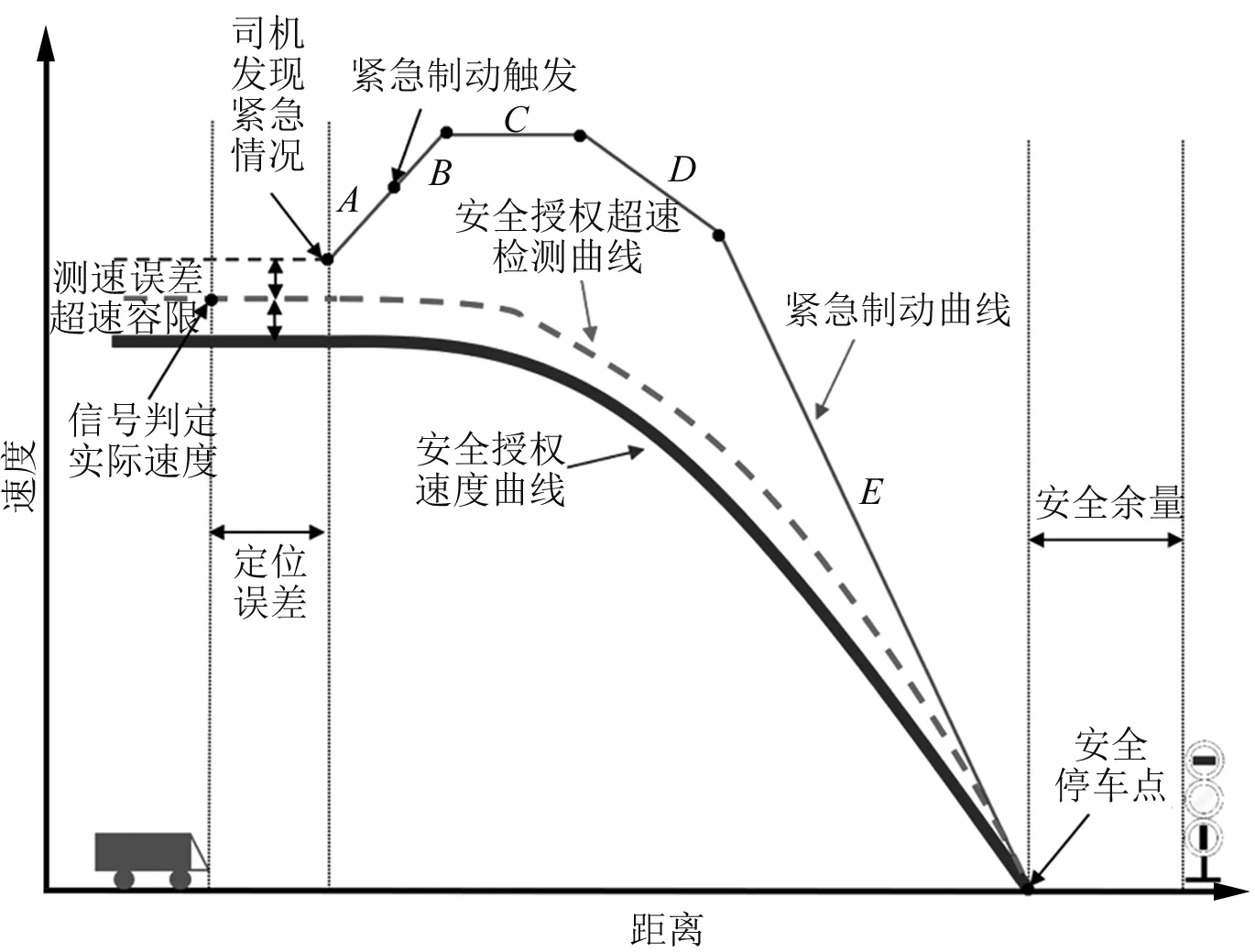
图2 有轨电车安全制动模型
在确保安全顶蓬速度不会超过各专业限值后,扣除测速误差和超速容限得到安全授权速度,这里测速误差取3%~6%,超速容限为1 m/s。在司机反应及时的前提下,计算得到的安全授权速度可保证有轨电车不会闯过安全停车点,如禁止信号机。
3.2 运营目标速度
运营目标速度是期望列车持续运行的速度,司机控制列车在目标速度上下小幅度波动。
大多数情况下,运营目标速度等于安全授权速度[7],但有三种例外场景。
(1) 区间变速。区间弯道较多时,安全授权速度会按照路段设计速度不断变化,当出现高速段到低速段变化时,高速段的最后一部分运营目标速度会低于安全授权速度,以防止列车驶入低速段后因超速触发报警。
(2) 站台变速有两种:正常变速是有轨电车在站台停站逐渐减速为零的过程,此时运营目标速度会根据到停车点的距离按常用制动率逐渐减小;跳停变速是在操作员设置站台跳停后,列车在靠近站台的区间提前减速至站台段通过速度的过程。两种情况的计算方法与区间变速类似,不再赘述。
(3) 路口变速。有轨电车在路口和社会道路平交,需要通过读取轨旁安装的信标,提前进行优先权申请和确认[8]。
图3为有轨电车路口变速模型,路口附近区域会安装若干信标:距离路口最远的信标用于触发信号车载主机和轨旁路口优先控制器及交通灯控制器的通信;P1点用于向路口交通灯控制器发送预告,即申请优先权,此时列车开始减速,这里以线路最高运营速度70 km/h为例;P2点用于和路口交通灯控制器确认优先权,此时列车减速至45 km/h左右;紧急制动提示牌的安装位置没有信标,用于向司机提示最晚的触发紧急制动时机,即此点触发紧急制动,列车能停在平交路口入口停车线前,此时车速35 km/h;P3点用于判断列车是否进入路口;P4点用于释放优先权;路口通过速度按国内常用的25 km/h考虑。
3.3 临时限速
临时限速是操作员向信号车载主机发送的人工限速命令,包括限速段开始里程、结束里程和限速值,该限速属于安全授权速度,一经设置在使用中保持不变,直到操作员取消或修改。
4 障碍物速度管理
由于共享路权的特点,有轨电车速度管理还需注意障碍物的速度和距离,分列车和其他两类。
4.1 列车障碍物
有轨电车司机显示单元会提示前后车距离,通常由中心调度管理系统收集线路上所有列车位置,根据相邻两列车的绝对位置和运行交路,计算单行程内的前后车距离。当前列车在行程内如果没有前车,则该车与折返点的距离作为前后车距离。
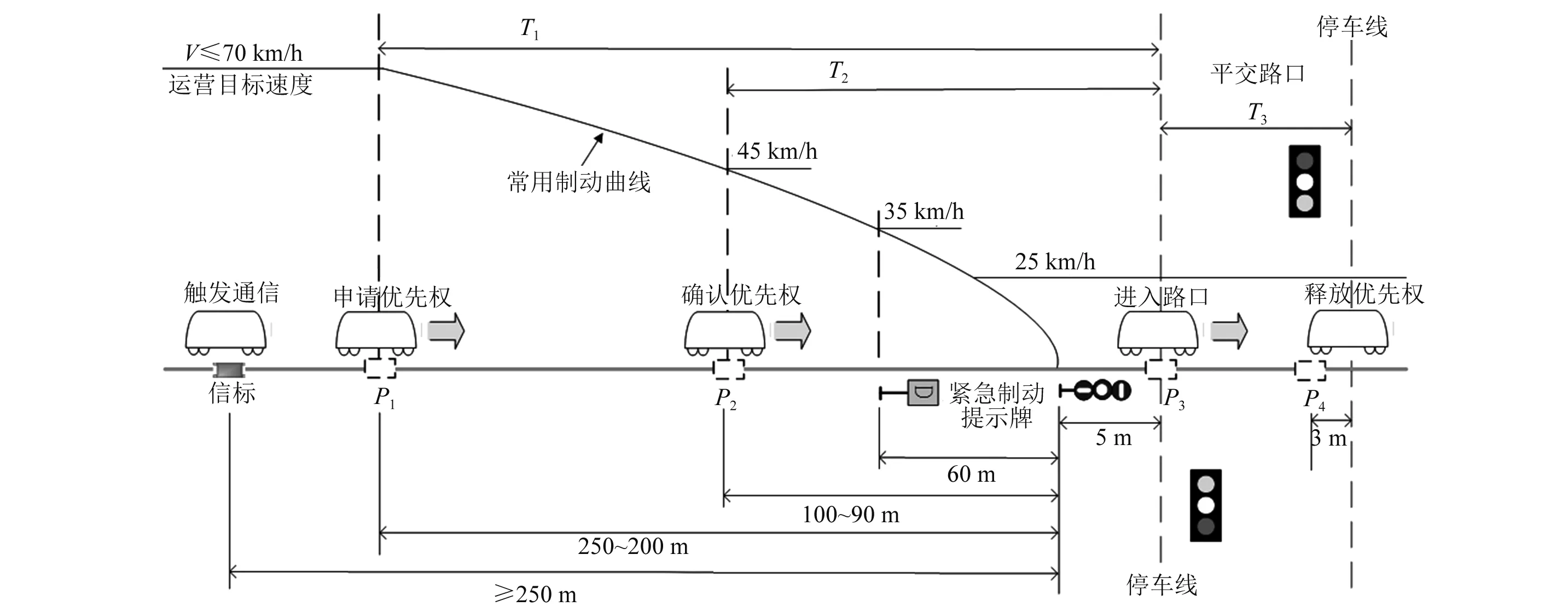
图3 有轨电车路口变速模型
前后车距离计算时还考虑前车的实际速度和运行方向:如果是同方向前车,该距离增加前车实际速度下全常用制动距离;如果是反方向前车,则减去全常用制动距离。因此,司机显示单元还提示前车实际速度。
4.2 其他障碍物
其他障碍物状态是通过障碍物检测主机进行识别,包括障碍物的编号、类别、纵向距离、侧向距离和径向速度等。这里的类别有人、车和其他三类;纵向距离是障碍物到列车延轨道方向的距离;侧向距离是障碍物到轨道中心线的垂直距离;径向速度是障碍物与列车的相对速度。
障碍物是否成为列车运行危害源,需通过位置、运动方向和运动速度来判定。通过对前后应用周期收到侧向距离和纵向距离对比判断障碍物当前位置是否侵入设备安装限界,以及运动方向是否朝向车辆运行限界,注意纵向距离需扣除列车本身单周期的运行距离。在方向确定后,即可在纵向距离基础上附加或扣除障碍物实际速度下的刹停距离,得到列车与障碍物之间的告警距离。
不同障碍物类型的刹停距离也略有不同,取最大20 m可覆盖绝大多数情况[9],也可在车载加装激光雷达或摄像头识别区分更多障碍物类型,从而更有效地计算障碍物速度和距离。
5 结束语
本文借鉴专用路权轨道交通的速度管理经验,结合道路交通工程设计规范,围绕运行速度进行系统化研究,全面分析线路、轨道、车辆和供电等专业的限速设计。从更安全的速度和更安全的速度变换两个环节着手,探讨信号专业的列车实际速度管理、目标速度管理和障碍物速度管理的原理和实现,有助于提升有轨电车运营的整体安全性和效率最大化。该研究在北京冬奥会崇礼有轨电车项目得到良好应用。
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28 02:23:50
云南画报(2021年4期)2021-07-22 06:17:10
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
铁道通信信号(2020年8期)2020-02-06 09:13:18
小学生学习指导(低年级)(2019年6期)2019-07-22 03:32:48
中国公共安全(2017年11期)2017-02-06 05:28:09
电源技术(2015年2期)2015-08-22 11:28:14
中国火炬(2014年11期)2014-07-25 10:32:08
机械与电子(2014年1期)2014-02-28 02:07:36
