
基于MOSES的FPSO限位作业中拖船布置方案适用性分析
2022-11-01 09:17:02赵铭文杨小乐蔡元桃董宝辉李翔云
中国海洋平台 2022年5期
赵铭文, 杨小乐, 蔡元桃, 董宝辉, 李翔云
(1. 中海石油(中国)有限公司 天津分公司, 天津 300459;2. 海洋石油工程股份有限公司, 天津 300461)
0 引 言
在海洋石油的生产过程中,需要对海底管道进行维护和更换。当海底管道的维护和更换出现在浮式生产储卸油装置(Floating Production Storage and Offloading, FPSO)单点系泊系统旋转半径内时,需要对FPSO进行限位操作[1-2],只有将FPSO限定在特定区域内,大型工程船舶才能进行工程作业。受风、浪、流等海洋环境因素的影响,FPSO的限位需要拖船的协助[3]。为确保限位作业方案的安全适用,需要对FPSO的运动和拖缆的张力进行计算分析[4-5]。
以某油田FPSO限位作业为例,对系泊系统模型和环境参数进行分析,由于海上安全作业允许的最大风级为7级,因此分析5级、6级和7级风作业工况下的环境条件参数,给出一套FPSO限位作业拖船布置方案,基于MOSES软件对多刚体耦合计算模型进行频域和时域分析,对计算结果进行分析,找出最适合拖船工作的工况,为安全生产提供依据。
1 系统模型与作业环境参数
1.1 系统模型
某FPSO以单点系泊的方式固定在工作海域[6]。固定装置为导管架式系泊塔,FPSO上的系泊钢架通过系泊腿、软刚臂与导管架式系泊塔连接。系泊腿两端均采用万向接头,软刚臂另一端与系泊导管架轴承相连,FPSO通过系泊导管架上的转盘绕系泊导管架转动。单点系泊系统如图1所示。

图1 软刚臂单点系泊系统
1.2 FPSO参数及海区环境参数
1.2.1 FPSO主要参数
某FPSO的主要参数如表1所示。
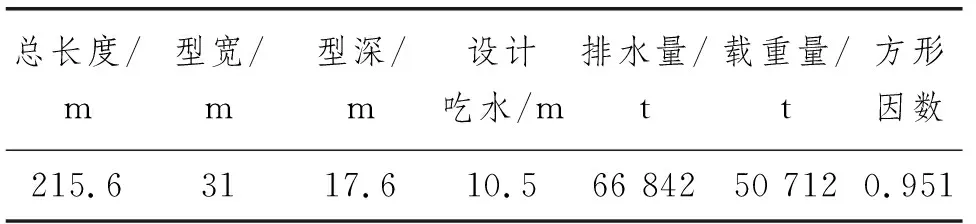
表1 FPSO主尺度
在对该FPSO进行限位分析时,为分析其装载状态对限位操作造成的影响,分别选取满载和空载两种典型装载状态,分别对应于装载手册中的Load 1(全部油舱满载)和Load 3(全部油舱空舱)。在实际限位作业中,可调整吃水达到相应装载状态。2种不同装载状态的静水力计算结果如表2所示,重心位置计算以船尾为基准。

表2 各装载状况静水力计算表
1.2.2 海区环境参数
对该海域的风、浪和有义波高进行统计分析,确定5级风、6级风和7级风作业工况的环境条件参数如表3所示。
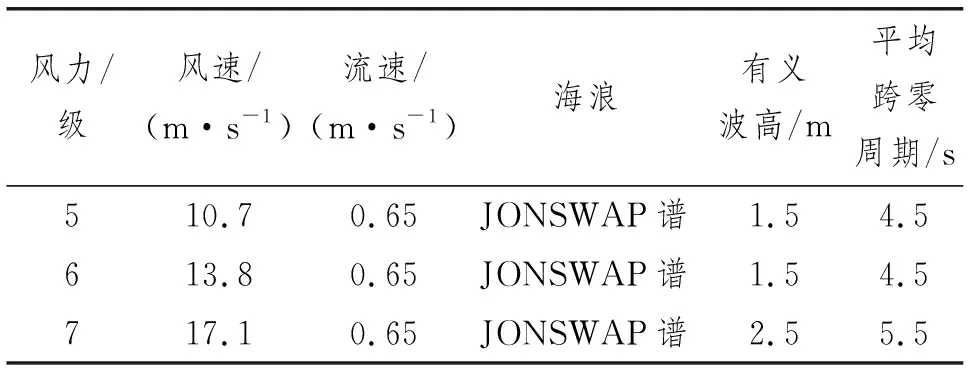
表3 不同风级作业工况的环境条件参数
1.3 限位区域与环境载荷方向
限位作业属于海底管道更换项目的一部分。为保证限位期间FPSO和工程作业船的安全,随着工程作业船从南偏西方向向北偏东方向逐步移动至FPSO系泊点(图2(a)的中心点),需要将FPSO限定在特定区域内,以防FPSO受风浪流的影响与工程作业船或其锚泊系统发生碰撞。海底管道更换作业分为6步,每一步有与之对应的限位区域,具体方案如图2所示(以下FPSO的艏向角均以正北为基准、顺时针方向):
(1) 当工程作业船接近FPSO系泊点侧2.5 km附近(从南偏西方向向北偏东方向逐步移动),抛锚点进入FPSO作业半径时,FPSO开始限位操作,FPSO的活动范围为0°~139°和264°~360°,活动范围角度为235°,且FPSO不能超越139°和263°两条限位边界线,如图2(a)所示。
(2) 当工程作业船接近FPSO系泊点侧850 m位置时,FPSO的活动范围为0°~55°和318°~360°,活动范围角度为97°,FPSO不能穿越55°和318°两条限位边界线,如图2(b)所示。
(3) 当工程作业船接近FPSO系泊点侧100 m位置时, FPSO的活动范围为0°~41°和355°~360°,活动范围角度为46°,FPSO不能穿越41°和355°两条限位边界线,如图2(c)所示。
(4) 当工程作业船到达FPSO的系泊点时,FPSO的活动范围为297°~344°,活动范围角度为47°,FPSO不能穿越297°和344°两条限位边界线,如图2(d)所示。
(5) 当工程作业船离开FPSO系泊点,离开FPSO作业半径时,FPSO的活动范围为281°~341°,活动范围角度为60°,FPSO不能穿越281°和341°两条限位边界线,如图2(e)所示。
(6) 当进行膨胀弯安装、立管安装等工作时,工程作业船在FPSO系泊点侧施工过程中,FPSO的活动范围为6°~66°,活动范围角度为60°,FPSO不能穿越6°和66°两条限位边界线,如图2(f)所示。
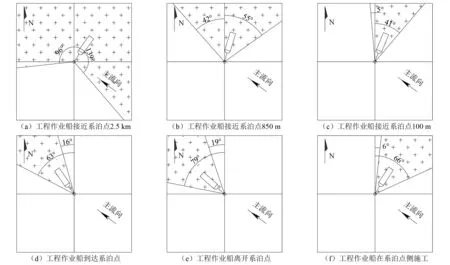
图2 限位区域
根据环境数据统计,在固定坐标系内,风在各个方向上均有分布,流在2月存在北偏东129°、3月—4月存在北偏东125°的主流向。在限位作业中,FPSO可能处于限位区域中的任意位置,因此需要选择相应的环境载荷方向进行组合。在限位分析中:令风、浪同向,选取 0°、45°、90°、135°、180°等5个风、浪方向;考虑海流主流向、限位区域和涨落潮情况,由于FPSO位置不确定,选择45°、90°、135°等3个流向。环境载荷方向如图3所示。对每个装载状态,共有15个环境方向的组合。

图3 环境载荷方向
1.4 拖船布置方案
在FPSO限位作业过程中,2条拖船的布置方式如图4和图5所示。在正常限位作业中拖船1、拖船2与FPSO的横向夹角为30°,分居FPSO两侧,拖缆的长度为360 m。在应急限位作业中拖船1与FPSO横向夹角为30°、拖缆长度为360 m,拖船2与FPSO的横向夹角为40°、拖缆长度为260 m。拖船提供的拉力可达884 kN,FPSO尾部甲板设置系泊绞车和带缆桩,FPSO尾部带缆桩的安全工作载荷为686 kN,拖缆参数如表4所示。当FPSO与风浪流方向夹角增大,1条拖船无法满足正常限位时,背风侧的拖船应及时调整位置至迎风侧,调整为应急限位拖船布置方案。迎风的拖船及时调整自己的位置,使拖缆与FPSO横向夹角保持在30°,另一侧的拖船应及时调整位置至同一侧,拖缆与FPSO横向夹角保持在40°。当风浪减小至允许正常限位的条件后, 2艘拖船再按顺序回到正常限位的位置。

图4 FPSO正常限位拖船布置方案
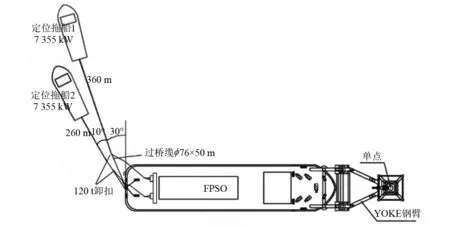
图5 FPSO 应急限位拖船布置方案

表4 拖缆相关参数
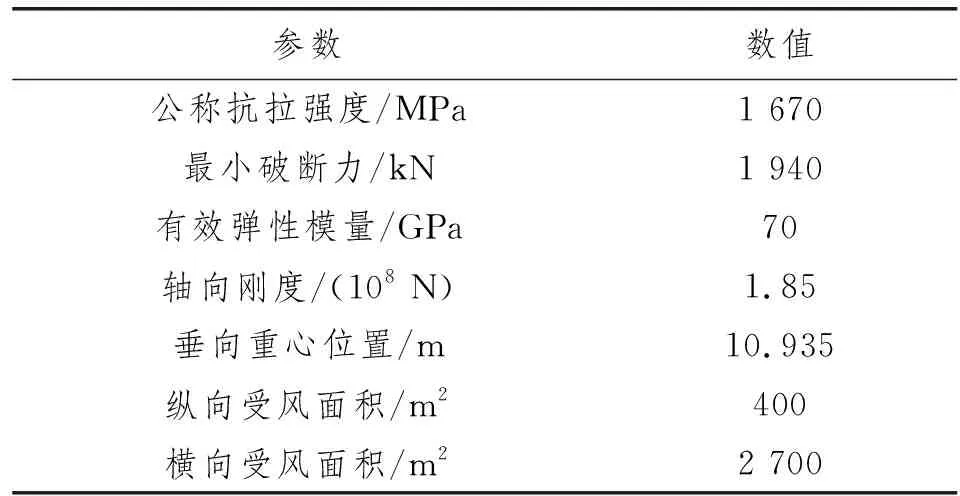
续表4 拖缆相关参数
2 模型与计算方法
限位计算分析采用海上操作工程软件MOSES[7],在MOSES软件中采用三维势流理论计算响应幅值算子(Response Amplitude Operator,RAO),整个系统在时域内进行多刚体动力响应分析。
2.1 坐标系
在建模过程中,船体坐标原点取在船尾中线处,x轴正向从船尾指向船首,y轴正向指向左舷,z轴正向竖直向上,如图6所示。

图6 船体坐标系示例
2.2 FPSO及系泊装置模型
分析的对象为多刚体系统:FPSO通过2条刚性系泊腿连接至软刚臂上,软钢臂又连接在固定于海上的导管架式系泊塔上;FPSO的尾部通过拖缆被拖船拖住以达到限位目的。软钢臂单点系泊装置、限位拖缆与FPSO模型连接,构成完整的限位分析多刚体耦合计算模型。
根据船舶型线资料,采用MOSES软件建立FPSO的水动力计算模型,如图7所示。
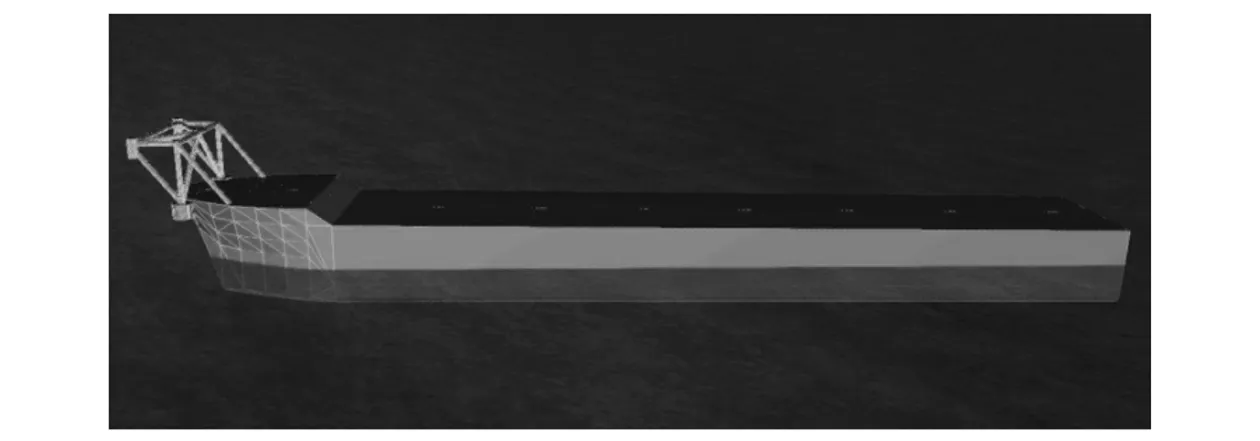
图7 FPSO水动力计算模型
根据软钢臂单点系泊装置技术资料,建立软钢臂单点系泊装置各组成部分模型,将其与FPSO模型连接,构成多刚体耦合计算模型,将软钢臂单点和FPSO作为不变形的刚性体(body 1释放z方向旋转、body 2释放全自由度),把摇臂模拟为弹性单元进行位移约束(EU指定刚度),系缆作为线性单元进行载荷传递,拖船固定方向(tug指定大小和方向),通过MOSES软件(connector命令)进行物理模型的叠加达到耦合效果,最终实现body 2的限位运动。根据装载状态定义整体系统的初始位置,如图8所示。
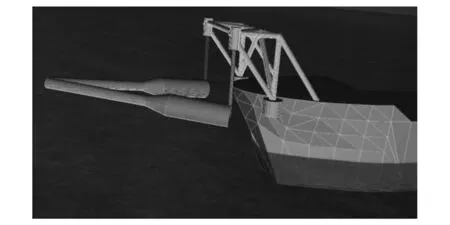
图8 软刚臂单点系泊系统模型
软钢臂与塔架连接的转盘和横摇-纵摇铰接接头放开软钢臂3个旋转自由度,可进行艏揺、纵摇和横摇自由度转动。对于系泊腿,其上端有轴向滚动轴承的万向接头允许系泊腿上端3个自由度的旋转,其下端经铰接接头连接于软钢臂压载水舱的吊耳上,可进行横摇和纵摇两个自由度的旋转。
2.3 运动响应函数(RAO)
采用MOSES软件计算FPSO在空载和满载装载状态下6个自由度的运动响应函数RAO。以空载状态下的纵荡为例,空载状态纵荡幅值运动响应曲线如图9所示。通过对FPSO频域的计算,将计算结果(6自由度解文件)传递给时域计算。
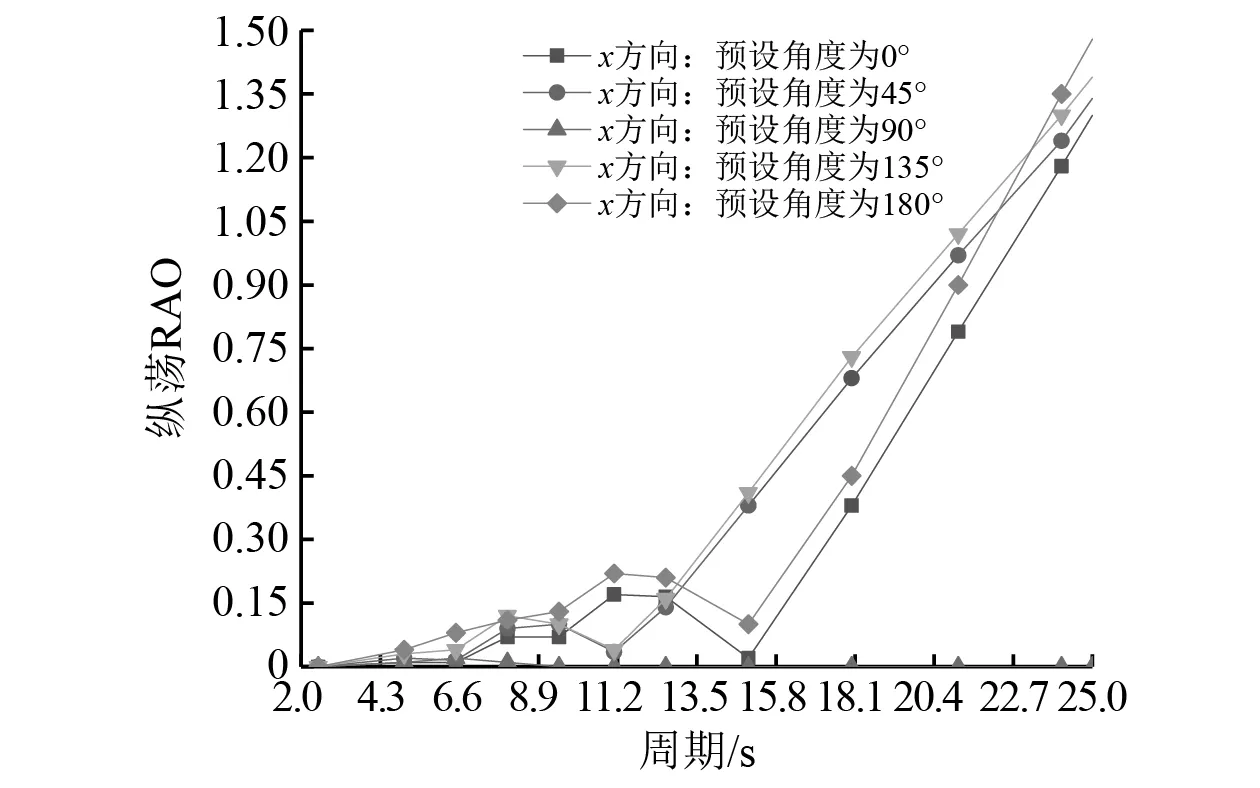
图9 FPSO空载状态纵荡幅值运动响应曲线
2.4 时域计算结果
依据作业海域的特点,选取JONSWAP谱,谱峰因子取3.3,对应第1.2节确定的5级风作业、6级风作业和7级风作业等3种工况,当FPSO受到的风、浪、流等环境载荷均在同侧时, FPSO所处的限位环境最为恶劣,因此将环境载荷均施加在FPSO的一侧,时域计算取3 h,步长取0.5 s进行数值模拟,采用统计方法对FPSO空载和满载状态下的运动响应和系泊力进行统计分析。
计算5级风作业海况下正常限位拖船布置方案中FPSO的运动和拖缆最大张力,结果如图10~图13所示。由于环境载荷均在FPSO的一侧,而在正常限位方案中2艘拖船分布在FPSO两侧,因此拖缆2不受力,张力为0 N。由图10和图11可知:在正常限位拖船布置方案下拖缆1的张力已经超过带缆桩的安全工作载荷,因此在计算6级和7级风作业海况时应该采用应急限位拖船布置方案;在5级风作业海况时,在2种装载状态下,采用正常限位拖船布置方案,仅当风、浪方向为0°~20°、145°~180°时,拖缆的张力极值均小于带缆桩的工作载荷,可进行限位作业,在其余风浪方向建议采用应急限位拖船布置方式进行限位作业。
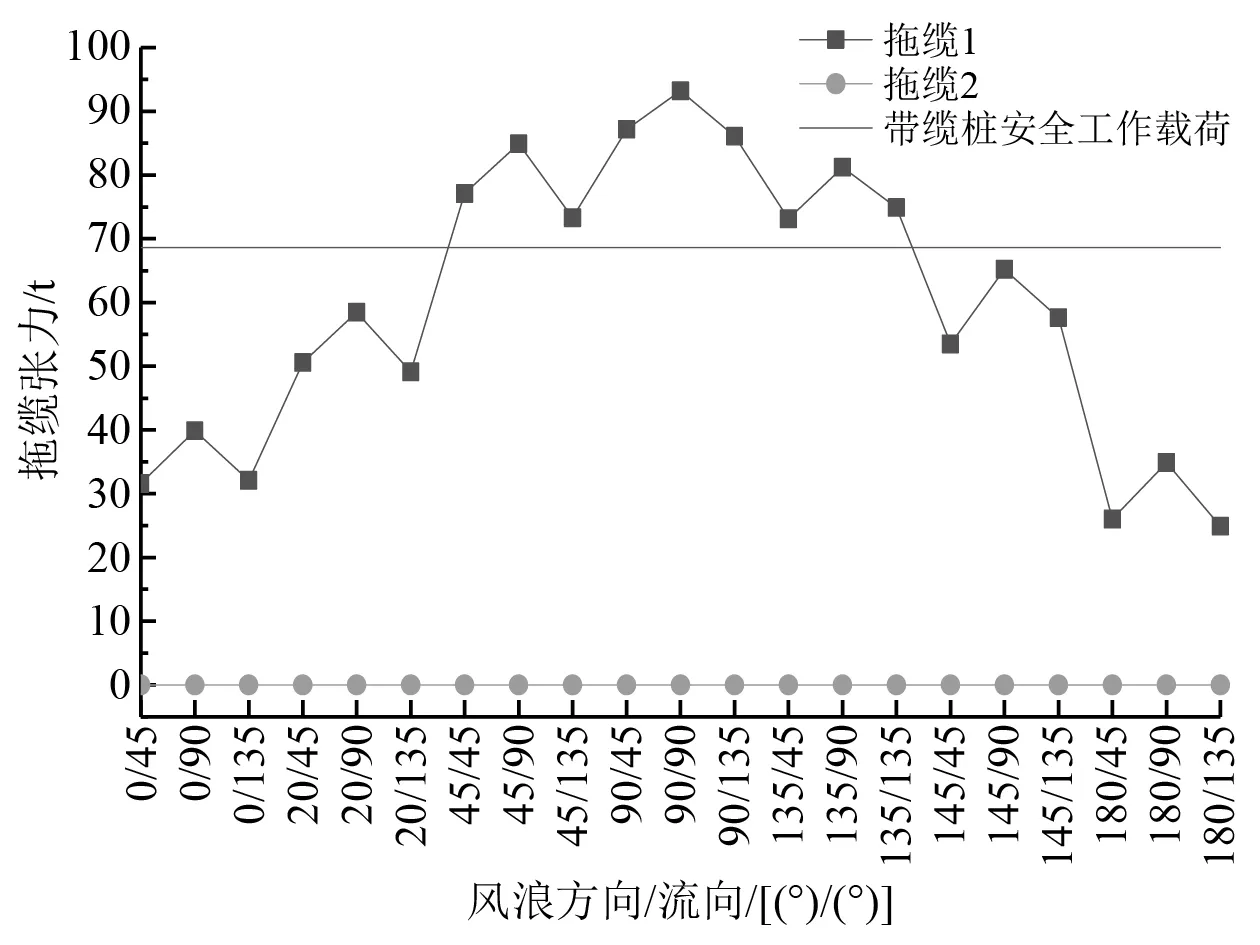
图10 5级风作用FPSO空载状态下拖缆张力

图11 5级风作用FPSO满载状态下拖缆张力

图12 5级风作用FPSO空载状态下纵荡、横荡和艏摇
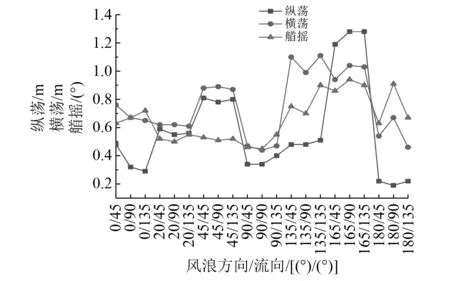
图13 5级风作用FPSO满载状态下纵荡、横荡和艏摇
6级和7级风作业海况应急限位拖船布置方案下FPSO的运动及拖缆最大张力如图14~图21所示。
由图14和图15可知,在6级风作业海况时,在2种装载状态下,采用应急限位拖船布置方案,拖缆张力极值均小于带缆桩的工作载荷,可进行限位作业。
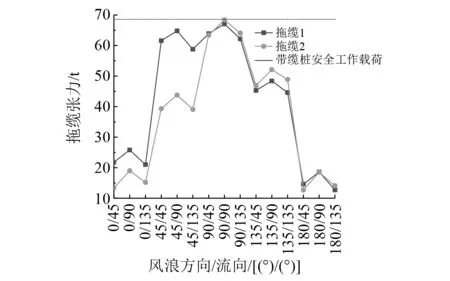
图14 6级风作用FPSO空载状态下拖缆张力

图15 6级风作用FPSO满载状态下拖缆张力

图16 6级风作用FPSO空载状态下纵荡、横荡和艏摇

图17 6级风作用FPSO满载状态下纵荡、横荡和艏摇

图18 7级风作用FPSO空载状态下拖缆张力

图19 7级风作用FPSO满载状态下拖缆张力

图20 7级风作用FPSO空载状态下纵荡、横荡和艏摇
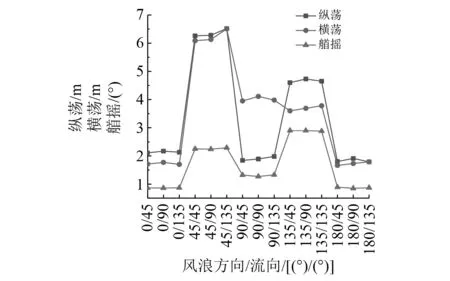
图21 7级风作用FPSO满载状态下纵荡、横荡和艏摇
由图18和图19可知,在7级风作业海况时,在2种装载状态下,采用应急限位拖船布置方案,仅当风、浪方向为0°、180°时,拖缆的张力极值小于带缆桩的工作载荷。因此,建议在此作业海况时停止限位作业。
在限位操作中,应尽可能使FPSO纵向与风、浪方向夹角最小,尽可能避免在横风状态下对FPSO进行限位作业,从而避免FPSO系统受力过大;建议FPSO在六级风及以下作业海况时进行限位作业。
3 结 论
给出一套FPSO限位作业拖船布置方案,并对该方案进行数值仿真计算,建立FPSO限位作业多刚体耦合计算模型,通过时域模拟不同海况时FPSO运动,计算FPSO的运动和拖缆受力情况。对本方案进行数值仿真计算,得到5级~7级风况、不同风浪方向下拖船布置方案的可行性,为限位作业的安全可行提供参考依据,为工程的实施提供一定的参考。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28 08:19:02
山东冶金(2022年2期)2022-08-08 01:50:50
世界海运(2021年9期)2021-10-08 06:49:30
珠江水运(2020年21期)2020-12-01 08:56:26
珠江水运(2020年16期)2020-09-16 03:28:52
兵工学报(2019年7期)2019-08-28 01:34:34
船海工程(2018年5期)2018-11-01 09:15:16
工业设计(2016年11期)2016-04-16 02:48:21
船海工程(2014年4期)2014-06-27 01:02:50
船海工程(2013年6期)2013-03-11 18:57:28
