
一种基于齿条力估计的车辆方向盘摆振抑制的方法
2022-11-01 09:47:52肖辰
汽车零部件 2022年10期
肖辰
中汽创智科技有限公司,江苏南京 211100
0 引言
近几十年以来,电动汽车行业发展迅速,对于车辆的舒适性以及平稳性要求也越来越高,而汽车摆振是影响车辆稳定的重要因素,电动汽车同样存在摆振现象。
汽车的转向摆振可以分为两种:①自激摆振。它是由车辆底盘以及车轮自身特性决定的,其振动频率与车速无关。②强迫摆振。由于加工或装配精度等问题,汽车车轮相关的部件会存在不均衡质量的问题,其振动频率一般为车轮转速的整数倍。
本文以双齿轮转向系统为例,设计一个车辆方向盘摆振抑制控制器,有效抑制强迫摆振对方向盘振动的影响,提升驾驶感受。摆振抑制控制器主要由齿条力观测器、摆振频率识别和谐振滤波器组成,最终由电动助力转向系统(EPS)电机提供补偿助力,抑制摆振。
1 双齿轮转向系统模型
1.1 双齿轮转向系统架构
当驾驶员操纵方向盘时,扭矩及转角传感器会检测到手力及方向盘转角信息,这些信息结合车载总线信号(如车速、发动机转速等信号)输送给电驱单元的电子控制单元,经过计算及控制,驱动电机提供助力,电机助力经过减速机构的一级传递,再经过齿轮齿条的二级传递,将电机助力转化为让齿条移动的推力,齿条移动最终让车轮实现转动,从而实现转向功能。双齿轮转向系统如图1所示。

图1 双齿轮转向系统
1.2 双齿轮转向系统动力学模型
转向系统动力学模型如图2所示。

图2 转向系统动力学模型
通过对整车转向系统架构的分析,可以将方向盘及管柱端看作一个刚性体,将齿条以及电机端的执行器机构看作另一个刚体,两个刚体通过有一定刚度的扭杆连接。各个零部件的惯量都可以等效到转向管柱和齿条的轴线上。
系统可以建立二自由度的动力学模型,其微分方程如下:
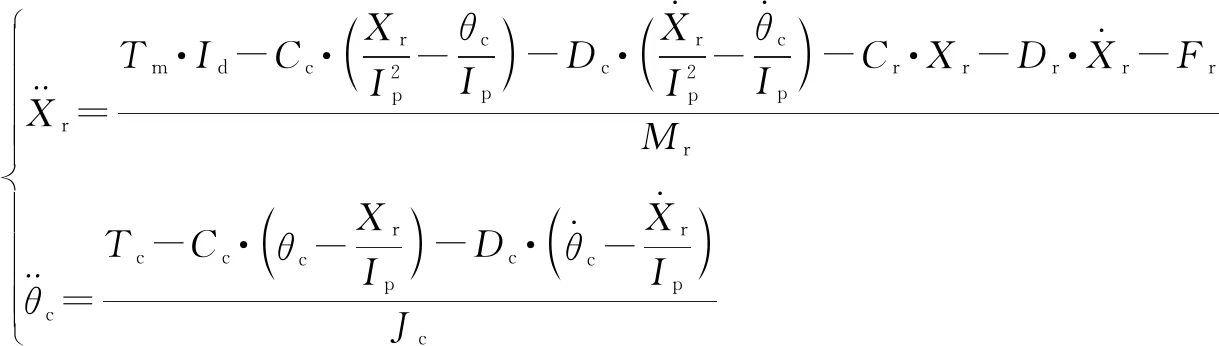
(1)

为了方便计算,广义齿条力包括系统摩擦力、车轮的反向作用力以及其他干扰项,并假设为光滑变量且1阶微分有界,记为()。


(2)
其中,

(3)

(4)

(5)

(6)
2 控制器设计
为了对车辆行驶过程中的摆振现象进行有效抑制,需要EPS助力电机提供相反的助力来抵消摆振产生的齿条力周期性扰动。因此,如前文所述,如果能够将齿条力实时估计,并对摆振扰动附近的频率做带通滤波,提取出扰动力,再通过电机实现抑制。
首先设计了齿条力观测器,用于实时估计齿条力,在此基础上,通过谐振带通滤波器,将摆振力单独提取出来,再经过适当处理使电机输出。
控制器抑制算法架构如图3所示。

图3 控制器抑制算法架构
2.1 齿条力观测器设计
文中针对双齿轮转向系统的特点,同时借鉴了文献[8]对扩展干扰观测器研究结果,提出了对车辆转向系统齿条力的估计算法。如前文所述,假设齿条力为光滑变量,即1阶可微,新增状态变量=()。可建立齿条力估计器如下:

(7)
式中:=[]为反馈矩阵;、、、、为待设计的反馈增益系数。
为了保证观测器的稳定性,根据李雅普诺夫定理,需保证扩张后的状态矩阵=-的特征值均具有负实部。进一步地,为了观测器具有可标定的带宽,抑制估计值的噪声,提高收敛速度,通过对反馈矩阵的设计,构建观测器的特征值方程如下:
()=(+)
(8)
在保证系统稳定的同时,可使观测器对大于的高频噪声有很好的抑制效果。
2.2 摆振抑制控制器
由于强迫摆振的振动频率与车轮转速相关,基于第2.1节完成的对齿条力估计器的设计,可实时得到齿条力的估计值。本节通过轮速识别出摆振频率,针对特定频率做谐振滤波,再由助力电机提供反向助力来抑制车辆摆振。抑制算法原理如图4所示。

图4 抑制算法原理
谐振滤波计算公式为:

(9)
式中:为阻尼系数;=arctan(2π),为谐波频率,为执行周期。
谐振滤波频率响应特性如图5所示。

图5 谐振滤波频率响应特性
3 系统仿真分析
3.1 系统仿真环境设计
为了验证控制器对车辆摆振的抑制效果,利用CarSim车辆模型和Simulink进行联合仿真试验。
双齿轮转向系统参数见表1。

表1 双齿轮转向系统参数
3.2 系统仿真试验
首先验证齿条力观测器的跟随性与准确度,在车辆处于连续转向工况下,得到车辆齿条力实际值与估计值,其仿真结果如图6所示。

图6 齿条力观测器仿真结果
为了验证控制器对车辆摆振的改善效果,分别对有无摆振抑制功能的系统进行仿真对比试验,如图7所示。

图7 有无摆振抑制功能对比仿真结果
仿真过程中的齿条力估计值以及摆振抑制力矩如图8所示。

图8 仿真过程中的齿条力估计值以及摆振抑制力矩
3.3 试验结果分析
系统仿真对齿条力观测器和摆振抑制控制器进行了较为全面的验证,选取了车辆发生摆振的典型工况。从图6仿真结果可以看出,齿条力观测器的估计值接近实际值,说明在车速60~100 km/h的小角度转向的工况下,基于刚性假设的二自由度的转向模型具有足够的保真度。从图6和图8中可以看出,设计适当的带宽,齿条力观测器可以过滤掉路面的高频噪声,并保留摆振的信息。
在图8中,通过谐波滤波器对目标频率的带通滤波,可以有效把齿条力估计值中的摆振力矩提取出来,再通过相应增益以及相位补偿措施,可以得到电机应该补偿的摆振抑制力矩。在图7中,通过增加摆振抑制控制算法和没有摆振抑制控制算法的比较仿真,此算法能有效降低摆振对方向盘手感的影响,提高驾驶的舒适性,增强驾驶员的驾驶信心。
4 结束语
本文提出了基于齿条力观测器和谐波滤波器的车辆摆振抑制算法,改善了车辆发生强迫摆振时的驾驶感受,提高了车辆驾驶的舒适性。首先,基于线性扩张状态观测器的原理,建立转向系统的动力学模型,得到齿条力的估计值;在此基础上,通过轮速计算得到车辆摆振频率的理论值,利用谐波滤波器,将摆振力从齿条力中提取出来,再通过适当的增益以及相位补偿,得到电机执行的补偿力矩。
不足的是,本文使用了简化的转向系统模型,将电机、减速机构与齿条看作了一个刚体,忽略了电机与减速机构之间为了降噪一般会使用弹性材料连接。一定程度上牺牲了系统模型的保真度,也影响了观测器的准确度。因此,未来还需要建立更精准的转向系统模型以改善对摆振的抑制效果。
猜你喜欢
水运工程(2020年2期)2020-02-26 06:28:38
中学生数理化·高一版(2019年12期)2019-12-31 06:52:24
物流技术与应用(2019年6期)2019-07-16 08:14:52
当代石油石化(2018年1期)2018-08-10 06:50:54
中国钢铁业(2018年6期)2018-07-26 06:55:00
水利科技与经济(2016年7期)2016-04-25 13:03:04
重型机械(2016年1期)2016-03-01 03:42:07
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
