基于PLC的双容水箱液位自抗扰控制
2022-10-31 09:43孟亚男张振怀
吉林化工学院学报 2022年7期
孟亚男,张振怀
(吉林化工学院 信息与控制工程学院,吉林 吉林 132022)
液位的控制是非常普遍的,比如酒精精馏塔的液位控制,锅炉的液位控制以及化工等众多领域的液位控制[1].在此领域,常用的控制算法是PID.有开环控制和闭环控制,开环控制往往精度较低、无自动纠偏能力;而闭环精度较高,对外部扰动和系统参数变化不敏感,但是也存在一些缺点:存在不稳定、振荡、超调等问题.因此在闭环的基础上提出更先进的控制算法,由于液位的高度调节对象通常存在单纯滞后、强大惯性,使得液位的高度改变速度较慢,而控制系统也通常呈现非线性,很难找到理想的PID参数[2].比如水箱液位内模PID控制对外部扰动变化不敏感[3];水箱液位模糊控制信息简单的模糊处理将导致系统控制精度降低和动态品质变差[4];水箱液位神经PID控制不能向用户提出必要的询问,而且当数据不充分时,神经网络就无法进行工作[5];水箱液位多模型自适应预测控制解决优化问题计算量大、耗时长[6].因此在传统PID的基础上引进自抗扰控制技术,增强整个闭环系统的鲁棒性和抗干扰能力,计算量小、反应调节迅速、耗时短,使控制效果更加理想.
下位机STEP7中的PID控制功能模块很容易实现建立自抗扰PID控制器,处理设定值和过程反馈值以及滞后控制装置的输入输出值[7].本文中以PLC和WinCC组态技术为基础,对水箱液位高度控制系统展开了深入研究,建立了液位高度控制系统的PLC控件模块、控制系统的组态技术,用WinCC完成了现场监测.使用WinCC不但能够完成对闭环控制流程的监控,同时还能够利用WinCC的组态用户界面完成自动设置和调整PID技术参数.系统还具有直观的图像显示,因此,PLC可以与组态技术相结合,在工业控制中应用比较普遍[8].
1 水箱系统结构与硬件选型
图1为水箱液位过程控制系统的现场图.
液位控制系统的机构主要是利用PLC来调整电动机的控制系统,也就是利用电动调节阀限制阀门的开度(OP)来控制液位的[9].PC机配有STEP7编程软件和WinCC组态配置管理软件.该系统是由变频器、执行器、水箱、压力变送器(测量液位)、A/D转换器、自抗扰控制器和D/A变换器等组成的一套液位系统.自抗扰控制器、D/A和A/D变换器用西门子的S7-300来实现,水箱液位的控制系统使用西门子的SIMATIC S7-300,S7-315 2DP作为控制器,子程序OB35循环中断设为1 000;电源选择的是PS 307 5A,模拟量输入模块选择AI8×12Bit,模拟量输出选择AO4×12Bit.
2 自抗扰控制器
自抗扰控制器是由PID控制器演变过来,采取了PID误差反馈控制的核心理念.传统PID控制直接取参考给定与输出反馈之差作为控制信号,导致出现响应快速性与超调性的矛盾.自抗扰控制器主要由3部分组成:跟踪微分器,扩展状态观测器和非线性状态误差反馈控制器.
2.1 跟踪微分器
为解决PID控制器中响应速度和超调制量之间的矛盾而设计的跟踪微分器如下.
(1)
a为速度因子,也叫输出信号的最大加速度;h为步长;r为快速因子;d为稳定参考值;y为输出信号;fsg(x,d)=(sign(x+d)-sign(x-d))/2.
2.2 扩展状态观测器
扩展状态观测器将整个系统输出的扰动作为扩增的系统状态,利用系统输入u和输出y来跟踪估计系统的状态和扰动.建立与之对应的扩张状态观测器如下:
(2)
2.3 非线性状态误差反馈控制律
状态误差反馈控制律的作用是对扩张状态观测器中的扰动估计值进行补偿,这里采用PID控制形式对误差进行调节,表达形式如下:
(3)
β1是比例系数;β2是微分系数;δ是区间宽度.fal的函数形式如下:
(4)
对于系统扰动补偿过程形式如下:
(5)
自抗扰控制器原理如图2所示.
3 程序设计
3.1 硬件组态及参数设置
在下位机软件中构建一个项目,接着生成一个S7-300站点.转到HWConfig页面,插入机架、PS、CPU、I/O模块等[10],按照硬件安装依次进行.进入CPU属性页面,MPI ID为2.
对于模拟量输入模块,输入参数为:E.测量范围:1~5 V;干扰频段为50 Hz;地址为256-271.
对于模拟量输出模块,输出参数为:I.测量范围4~20 mA,响应模式OCV,地址为272-279.
3.2 地址分配
控制系统的地址分配如表1所示.

表1 控制系统的地址分配
创建了一组共用的数据信息块DB3,内容如表2所示.
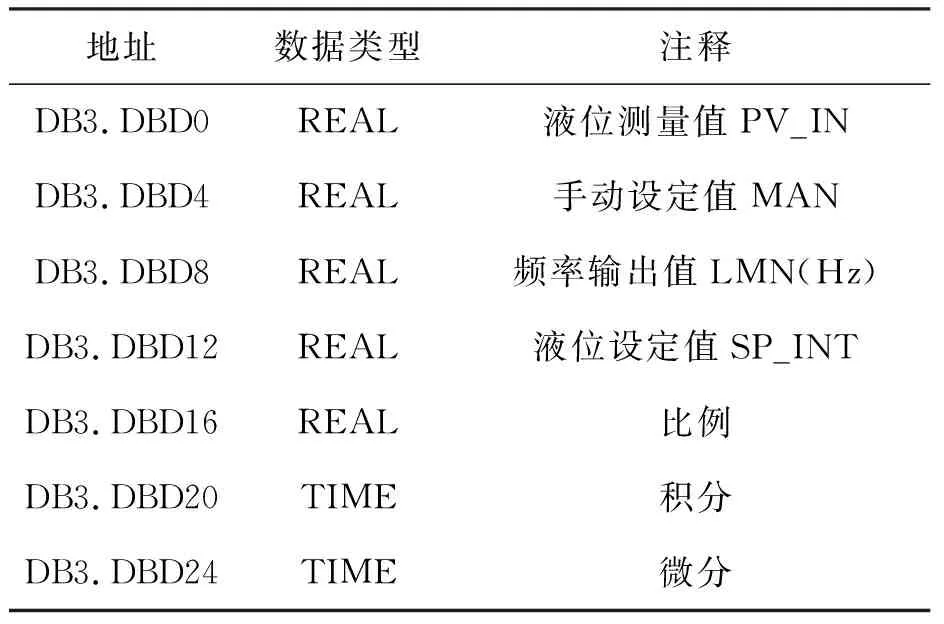
表2 数据块DB3的参数分配
用于存储完成PID控制的所有流程参数.WinCC也可通DB3存取并编辑PID的实时数据.DB3.DBD0主要用于存储测量的液位(mm);DB3.DBD4用于存储手动状况下的液位设定值(mm);DB3.DBD8存储执行器变频器的频率值(Hz);DB3.DBD12可以用来存储自动情况下的液位设定值(mm);DB3.DBD16存储增益值,都是REAL类型.DB3.DBD20存储积分时间的常数;DB3.DBD24主要用于存储微分时间常数,它们的类型是TIME.
3.3 模拟量的规范化处理
模块FC105用于将模拟I/O格式的整数值转换为实数值.PIW256是液位高度的输入通道.频率量程为0~50 Hz,压力变送器的量程为1~5 V,依次对应上限HI_LIM和下限LO_LIM,都是实数类型.当BIPOLAR输入为零,意味着信号输入值都是单极性.DB3.DBD0 是存储实值结果,为实际液位高度测量值(mm).
功能模块FC106用来将模拟量实型值转换为I/O格式的整数型值.依次对应上限HI_LIM和下限LO_LIM.BIPOLAR的输入通常是零,为单极性转换.PQW272是I/O格式的输出,范围为0~27 468,对应4~20 mA,如图3所示.
3.4 PID控制程序
功能模块FB41是一种PID控制器,是一种连续控制器.应将其设置为后台数据块,令其为DB10.图4是FB41程序.M0.0用作置位PID功能;M0.1是用来控制该控制器的启停;M0.2和M0.3分别为比例和积分的控制开关,由上位机的比例开关和积分开关控制;SP_INT是液位设定值;PV_IN是现场反馈的实际液位;DB3.DBD4为手动情况下的液位设定值;GAIN为增益;TI是积分时间常数;TD是微分时间常数;LMN_HLM上限值为100 Hz,LMN_LLM下限值为0 Hz.LMN 输出实型数据的信号频率保存到DB3.DBD8中.液位高度的采用周期取1 000 ms.其他技术参数在DB10中为默认值.
4 上位机WinCC组态设计
4.1 上位机组态选择
本系统使用WINCC作为上位机进行组态,其主要因素在于WINCC是目前各种组态应用软件中功能较全的一个;二是充分考虑到下位机使用的是S7-300PLC的程序设计开发工具.它和WINCC都是SIEMENS有限公司的软件产品,所以WINCC自身增加了S7-300PLC的驱动系统应用软件,从而使得PLC和上位计算机系统的连接能够更加直接而且有效简单[11].
4.2 上位机变量设置
开启WinCCExplorer窗口,创建名称为223单个用户项.在变量管理器中,添加驱动“SIMATIC S7 PROTOCOL SUITE”.在MPI下生成名为“123”的新驱动程序的连接,将站点ID设置为2,机架编号为零,插槽编号为2.上位机和下位机MPI均为2的PLC站点间的通信.通过名为“123”里的信息,按表1和表2建立创建WinCC的所有外部数据变量,与PLC的通讯相连.如5所示.
4.3 上位机进行画面组态
建立了4种图像画面,分别为主图像画面、历史曲线图像画面、实时曲线图像画面、历史数据图像画面.利用图像编辑器可以创建一个名为“主图象画面”的液位监控过程图像画面,可以任意修改画面窗口,并增加相应的输入输出设备显示和各种功能和操作按键.有现场画面、实时数据、历史数据,数据报表和参数整定3大部分组成,具体如图6所示.
5 程序运行及结果分析
传统的控制方案仿真曲线为黑色线,加入自抗扰控制器仿真曲线为红色线,两者进行对比分析,仿真运行当液位稳定到40 mm时给定一个设定值为60 mm的值,然后液位稳定在60 mm左右.由仿真结果可知,加入自抗扰控制器控制使系统调节时间缩短,反应速度加快,震荡超调特别小,增强整个闭环系统的鲁棒性和抗干扰能力,使控制效果更加理想.能达到方便和自动的效果.设计的自抗扰控制器在水箱液位控制系统中具有比较理想的动态性能和稳态性能.
6 结 论
以PLC控制技术和WinCC的组态技术为基础,对水箱液位高度控制系统展开了研究,构建了液位高度控制系统的PLC控制模型,并建立了控制系统的组态,用WinCC技术完成了现场监测.利用WinCC不但能够进行对闭环控制流程的监控,同时还能够利用WinCC的组态界面进行设定和调整PID参数.系统主要是PLC结合自抗扰控制器对液位进行自动控制,可以使被控对象保持在我们所希望位置的一个允许范围内上下波动,达到一定的自动化控制程度.然后对系统的大部分硬件设备完成方案设计和选型,最后经过试验结果分析,证明该设计系统实现了对水箱液位的自动监控管理.此控制系统具有智能化、易于控制、操作稳定,设计的控制器能够无超调、无静差地对液位进行控制,且抗干扰能力强、鲁棒性好等特点.
猜你喜欢
应用能源技术(2022年9期)2022-10-22
全面腐蚀控制(2022年1期)2022-01-26
湖北农机化(2021年7期)2021-12-07
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
锻压装备与制造技术(2020年2期)2020-05-12
汽车文摘(2018年1期)2018-11-26
汽车文摘(2018年7期)2018-07-04
科学与财富(2017年24期)2017-09-06