基于子域法的双励磁双调制轴向式磁场调制永磁齿轮磁场分析
2022-10-31 13:56:04葛研军王大明马雪祺
中国机械工程 2022年20期
葛研军 刘 放 王大明 马雪祺 于 涵
大连交通大学机械工程学院,大连,116028
0 引言
磁场调制永磁齿轮(field modulated permanent magnetic gears,FMPMG)是一种新型传动装置,在风力涡轮机[1]、船舶推进系统[2]等应用场合都具有传统机械齿轮不可替代的优势。FMPMG具有永磁体利用率高、电磁转矩大及自动过载保护等优点。FMPMG可分为径向式FMPMG(radial FMPMG,RFMPMG)及轴向式(axial FMPMG,AFMPMG)两种结构[3]。
RFMPMG具有结构紧凑、传动效率高等优点[4],但由于该装置有三层转子、两层气隙,且调磁极块结构复杂,因而其样机制造困难,目前鲜有应用;而AFMPMG无需精确对中,且调磁极块结构简单,轴向距离小[5],样机制造容易,易于应用于生产实际中。
AFMPMG的主要缺点是轴向及切向磁路不封闭,存在较严重漏磁,导致其转矩密度偏低(一般不大于70 kN·m/m3)。为此本文提出一种双励磁、双调制的AFMPMG结构(dual-excitation modulation AFMPMG,DEM-AFMPMG)。DEM-AFMPMG在AFMPMG基础上增加了一个调磁环,使低速永磁转子同时受到两个调磁环的双向调制作用,增加的调磁环可将AFMPMG气隙中的漏磁通转化为有效谐波并再次作用在低速永磁转子上,进一步提高了低速永磁体的利用率,增大其输出转矩及转矩密度。经3D有限元计算,DEM-AFMPMG转矩密度可高达130 kN·m/m3以上,约为现有AFMPMG的1.9倍。
另外,现有AFMPMG的气隙磁通密度及电磁转矩一般采用3D有限元方法计算,与2D有限元相比,3D有限元虽然计算精度高,但计算速度慢,需耗费大量计算机资源[6-7]。为此,本文提出一种基于子域法计算DEM-AFMPMG气隙磁场及电磁转矩的模型。与3D有限元法相比,本文方法计算速度快且耗时少。
1 DEM-AFMPMG结构分析
图1所示为现有AFMPMG的机械结构,其工作原理如下:当AFMPMG调磁极块数目为高速永磁转子与低速永磁转子磁极对数之和时,调磁环可对高速永磁转子和低速永磁转子形成的气隙磁场进行调制[8],使磁极对数不同的高速/低速永磁转子形成磁场耦合,进而传递转速和转矩。

图1 AFMPMG机械结构Fig.1 Mechanical structure of AFMPMG
由图1可知,AFMPMG的轴向磁路较长,磁通线由高速永磁转子穿过调磁环到达低速永磁转子时的磁阻较大,使轴向及切向的端部磁路较难封闭,导致漏磁及磁损耗增大,永磁体利用率较低,所传递的转矩及运行效率也偏低。
为减小AFMPMG漏磁及磁损耗,笔者在图1所示AFMPMG低速转子的右侧再增加一个图2所示的调磁环(以下称外调磁环),此时原有调磁环仍处在高速永磁转子与低速永磁转子之间(以下称内调磁环)。

图2 DEM-AFMPMG机械结构Fig.2 Mechanical structure of DEM-AFMPMG
由图2可知,外调磁环的引入使低速永磁转子夹在内、外两个调磁环之间,减小了内、外调磁环调制磁通线时的磁阻,使更多磁通线穿过低速永磁转子,提高了低速永磁体利用率;另外,外调磁环的引入还将AFMPMG轴向漏磁通调制转化为有用谐波,并再次作用在低速永磁转子上,较好地解决了AFMPMG漏磁大、转矩密度及传动效率低等问题。
2 基于子域法建立DEM-AFMPMG的2D解析模型
2.1 模型假设
为方便分析,设图2所示DEM-AFMPMG所有转子的内、外半径均相等;另外,为使内、外调磁环达到相同的调制效果,令内调磁极块、外调磁极块结构相同且数量相等。
若设DEM-AFMPMG高速永磁转子与低速永磁转子的磁极对数分别为ph及pl,各转子的内、外半径及平均半径均为R1、R2及Rm,内、外调磁极块数均为N,即
(1)
将图2所示模型在Rm处展开,可得图3所示的DEM-AFMPMG 2D解析模型。

图3 DEM-AFMPMG 2D解析模型Fig.3 2D analytical model of DEM-AFMPMG
2.2 子域划分
将图3所示的DEM-AFMPMG 模型划分为7个区域。其中,Ⅰ为高速转子永磁体区域;Ⅱ为高速侧气隙区域;Ⅲ为内调磁环区域;Ⅳ为低速侧内气隙区域;Ⅴ为低速转子永磁体区域;Ⅵ为低速侧外气隙区域;Ⅶ为外调磁环区域。
图3所示模型为恒定磁场,其磁矢位应满足泊松方程或拉普拉斯方程,因此,图3中的有源磁动势可采用泊松方程求解,而无源磁动势则采用拉普拉斯方程求解。
在区域Ⅰ和Ⅴ中应用泊松方程,有
2A=-μ0j
(2)
式中,A为磁动势;μ0为真空磁导率;j为磁化电流密度。
在区域Ⅱ、Ⅲ、Ⅳ、Ⅵ和Ⅶ中应用拉普拉斯方程,有
2A=0
(3)
轴向及切向气隙磁通密度可分别表达为[9]
(4)
(5)
3 气隙磁场及电磁转矩理论计算
3.1 区域Ⅰ和区域Ⅴ气隙磁通密度计算
区域Ⅰ中应用泊松方程,有
(6)
0≤z≤z10≤θ≤2π
式中,Mz为轴向磁化强度。
Mz可通过傅里叶变换得到:
(7)
(8)
式中,δh为高速永磁转子初始相位角;Mn为磁极化强度,n=1,2,…;Br为永磁体剩磁;αh为高速永磁体极弧比。
由于z=0处磁场切向分量为零,加之轴向磁场分量具有连续性,因此可得边界条件:
AⅠ(θ,z1)=AⅡ(θ,z1)
(9)
将式(7)和式(8)代入式(6),根据边界条件式(9)可获得区域Ⅰ的磁动势AⅠ,进而可通过式(4)及式(5)获得区域Ⅰ的轴向气隙磁通密度BⅠz(θ,z)和切向气隙磁通密度BⅠθ(θ,z):
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
m=1,3,5…
同理,可求得区域Ⅴ磁动势AⅤ、轴向气隙磁通密度分量BⅤz(θ,z)和切向气隙磁通密度分量BⅤθ(θ,z)。
3.2 区域Ⅱ、区域Ⅳ和区域Ⅵ气隙磁通密度计算
区域Ⅱ中应用拉普拉斯方程,有
(19)
z1≤z≤z20≤θ≤2π
由于z=z2处调磁极块与气隙区域边界之间的磁场具有连续性,其他位置切向磁场均为0,因此有
(20)
z=z1处的切向磁场也具有连续性,因此其边界条件为
(21)
将式(20)及式(21)的偏微分方程解代入式(19)中可得区域Ⅱ的磁动势AⅡ,进而根据式(4)和式(5)获得区域Ⅱ的轴向气隙磁通密度BⅡz(θ,z)及切向气隙磁通密度BⅡθ(θ,z):
(22)
(23)
(24)
(25)
(26)
(27)
(28)
(29)
(30)
(31)
同理,可求得区域Ⅳ的磁动势AⅣ及区域Ⅵ的磁动势AⅥ、区域Ⅳ的轴向气隙磁通密度BⅣz(θ,z)及切向气隙磁通密度BⅣθ(θ,z)、区域Ⅵ的轴向气隙磁通密度BⅥz(θ,z)及切向气隙磁通密度BⅥθ(θ,z)。
3.3 区域Ⅲ和区域Ⅶ气隙磁通密度计算
区域Ⅲ中应用拉普拉斯方程,有
(32)
z2≤z≤z3θi≤θ≤θi+β
与空气隙相比,调磁极块的磁导率为无穷大,其两侧的磁场切向分量为0,因此边界条件为
(33)
由于调磁极块两侧与气隙之间的磁场也具有连续性,故有
(34)
应用分离变量法将边界条件式(33)及式(34)分别代入式(32)中,可得区域Ⅲ的磁动势AⅢ,进而根据式(4)和式(5)获得区域Ⅲ的轴向气隙磁通密度BⅢz(θ,z)及切向气隙磁通密度BⅢθ(θ,z):
(35)
(36)
k=1,2,3,…
(37)
(38)
(39)
(40)
同理,可求得区域Ⅶ磁动势AⅦ、轴向气隙磁通密度BⅦz(θ,z)和切向气隙磁通密度BⅦθ(θ,z)。
求出DEM-AFMPMG 7个子区域的轴向及切向气隙磁通密度后,即可基于麦克斯韦应力张量法得到DEM-AFMPMG电磁转矩:

(41)
(42)
(43)
式中,L为DEM-AFMPMG的轴向总长度,即L=z8-z0;TA为图3中区域Ⅱ及区域Ⅳ内调磁环所形成的电磁转矩,其作用方式、作用机理及转矩大小均与现有的AFMPMG相同;TD为图3中区域Ⅵ外调磁环所形成的电磁转矩。
因此,由式(41)可知:DEM-AFMPMG所形成的电磁转矩由两部分组成,其中内调磁环形成AFMPMG模式转矩TA,而外调磁环则形成DEM-AFMPMG模式转矩TD,即在AFMPMG基础上,DEM-AFMPMG又增加了一个附加转矩TD。
由式(41)还可知:T与BⅡz(θ,z)、BⅡθ(θ,z)、BⅣz(θ,z)、BⅣθ(θ,z)、BⅥz(θ,z)、BⅥθ(θ,z)均有关,说明图2(或图3)所示的内调磁环、外调磁环均对DEM-AFMPMG有调制作用,且外调磁环的引入,使式(41)中含有BⅥz(θ,z)与BⅥθ(θ,z)的乘积项,有效提高了DEM-AFMPMG电磁转矩T及转矩密度。
4 理论值与有限元值结果比较
表1所示为DEM-AFMPMG相关结构参数。表1中,永磁体材料牌号为NdFe35,充磁方向为轴向;轭铁材料为Q235。

表1 DEM-AFMPMG结构参数
4.1 气隙磁通密度
DEM-AFMPMG主要包括轴向和切向气隙磁通密度,其中轴向气隙磁通密度对电磁转矩影响最大。
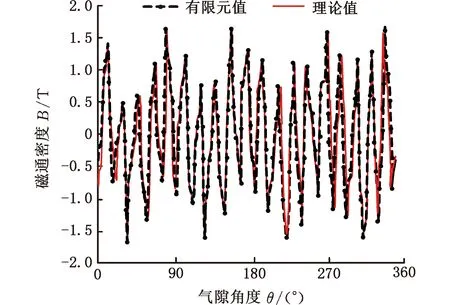
基于表1所示结构参数建立图2所示的DEM-AFMPMG有限元模型,并分别对高速侧和低速侧气隙进行3D有限元波形扫描,获得图4所示DEM-AFMPMG 轴向气隙的有限元磁通密度波形。同时,基于式(22)和式(23)获得图4所示的DEM-AFMPMG 轴向气隙的理论计算磁通密度波形。

(a)DEM-AFMPMG高速侧气隙
(b)DEM-AFMPMG低速侧内气隙

(c)DEM-AFMPMG低速侧外气隙图4 DEM-AFMPMG气隙磁通密度Fig.4 Air-gap magnetic tightness of DEM-AFMPMG
图4中,3D有限元的永磁体扫描半径为50~105 mm;扫描间距为1 mm;扫描角度为0~360°。由图可知,3D有限元计算结果与本文所建模型的理论解基本一致。其中,图4a所示的高速侧气隙磁场共有8个主波形,38个谐波形,分别与高速及低速永磁转子磁极对数相匹配;图4b及图4c所示的低速侧内外气隙磁场均为38个谐波形,与低速永磁转子磁极对数相等,说明内调磁环、外调磁环对高速及低速永磁转子调制正确,并形成所需的传动比传递转速及转矩。
另外,图4中的3D有限元高速侧气隙磁通密度为-1.53~1.53 T,低速侧内气隙磁通密度、外气隙磁通密度分别为-1.60~1.65 T和-1.72~1.74 T;而理论计算的高速侧气隙磁通密度为-1.50~1.53 T,低速侧内气隙磁通密度、外气隙磁通密度分别为-1.60~1.64 T和-1.71~1.71 T,与3D有限元结果之间的误差不大于5%,说明本文所建模型准确度高。
3D有限元计算时间为1 h,而本文所建模型的计算时间仅为0.2 h,且不包含3D有限元所必备的模型建立、网格划分和求解设置等时间。因此,本文所建模型不仅准确度高,而且耗时短,可快速准确获得DEM-AFMPMG气隙磁通密度波形及其数值计算结果。
4.2 静态电磁转矩

(a)DEM-AFMPMG高速永磁转子
图5所示为基于3D有限元仿真及由式(41)所得的DEM-AFMPMG高速/低速永磁转子静态电磁转矩曲线。其中,图5a所示为低速永磁转子不动、高速永磁转子旋转一对磁极距时的静态转矩,图5b则为高速永磁转子不动、低速永磁转子旋转一对磁极距时的静态转矩。

(b)DEM-AFMPMG低速永磁转子图5 DEM-AFMPMG静态电磁转矩Fig.5 Static electromagnetic torque of DEM-AFMPMG
由图5可知,高速永磁转子和低速永磁转子的静态电磁转矩均为正弦曲线,且本文所建模型的理论计算曲线与3D有限元曲线基本重合。图5中,3D有限元所得的高速及低速永磁转子最大静态转矩分别为27.8 N·m及130 N·m;理论计算值则分别为27 N·m和128 N·m,与3D有限元结果之间的误差不大于5%。另外,无论是3D有限元还是理论计算,其高速、低速的永磁转子最大静态转矩比值均为4.75,符合本文所设定的传动比。
与气隙磁通密度的计算时间相同,图5a和图5b的有限元计算时间为1 h,而本文所建模型的理论计算时间则为0.2 h,同样说明本文所建的转矩模型不仅准确度高,而且耗时短,可快速准确地获得DEM-AFMPMG电磁转矩波形及其数值结果。
另外,3D有限模型所得的转矩密度为134 kN·m/m3,而理论计算则为132 kN·m/m3,与3D有限元结果之间的误差为1.5%。
5 结论
(1)DEM-AFMPMG在AFMPMG基础上引入一个外调磁环,外调磁环的引入,使低速永磁转子同时受到双向励磁与双向调制作用,不仅减少了低速永磁转子的轴向磁阻及轴向漏磁,而且还将AFMPMG的漏磁通转化为有用谐波并再次作用在低速永磁转子上,提高了永磁体利用率,增大了DEM-AFMPMG输出转矩及转矩密度(不小于130 kN·m/m3)。
(2)子域计算法虽然是DEM-AFMPMG 3D模型的等效2D模型,但它包括了3D有限元法的轴向及切向漏磁计算,因此其计算精度与3D有限元法相当(计算误差不大于5%),且子域法计算速度快、耗时少(气隙磁通密度及电磁转矩的计算时间均较3D有限元法节省80%)。
(3)子域法所建电磁转矩模型表明,DEM-AFMPMG电磁转矩由内调磁环所形成的TA及外调磁环所形成的TD两部分组成,其中,TA与AFMPMG模式相当,而TD则为引入外调磁环后的附加转矩,即外调磁环的引入,可有效提高DEM-AFMPMG的电磁转矩及转矩密度;另外,与3D有限元法相比,基于子域法的计算模型可在参数优化时直接替换尺寸参数,不需要重新建模,便于DEM-AFMPMG不同结构尺寸的分析与比较。
猜你喜欢
电力自动化设备(2022年6期)2022-06-15 07:19:30
大电机技术(2022年2期)2022-06-05 07:28:34
防爆电机(2022年1期)2022-02-16 01:14:00
商品与质量(2021年29期)2021-07-19 12:52:20
上海大中型电机(2021年1期)2021-06-09 09:12:04
防爆电机(2020年4期)2020-12-14 03:11:08
防爆电机(2020年3期)2020-11-06 09:07:30
传感器与微系统(2018年7期)2018-08-29 00:44:20
电测与仪表(2017年24期)2017-12-19 05:15:18
现代应用物理(2016年4期)2017-01-19 09:22:46