
北斗系统多频观测值差分定位模型实现
2022-10-25 13:17蔡雨寒王天文祝会忠
水利技术监督 2022年10期
蔡雨寒,王天文,祝会忠
(1.辽宁省沈阳水文局,辽宁 沈阳 110004;2.沈阳市勘察测绘研究院有限公司,辽宁 沈阳 110004;3.辽宁工程技术大学,辽宁 阜新 123000)
1 概述
北斗卫星导航系统(BDS)是中国完全独立研制开发的、具有自主知识产权的卫星导航定位系统,由地球静止轨道(GEO)卫星、倾斜地球同步轨道(IGSO)卫星和中高度地球轨道(MEO)卫星构成。可以提供精准度为10m的定位服务,以及精度为0.2m/s的测速服务和精度为20ns的授时服务。在BDS测量中,直接采用原始的伪距和载波观测值解算得到的结果有时不能满足用户的精度需求,测量时往往大量采用经线性组合后形成的各种虚拟观测值,利用误差的相关性,从而使得观测量中对定位解算有较大影响的误差得到减弱或者消除。
国内外学者对此方面都有着大量研究,伍岳通过组合后的特性对GPS最优组合整数系数进行了搜索[2];黄令勇依据多频组合观测值的3个选取标准,通过枚举法列出部分整系数组合,并对模糊聚类理论进行了改进,提出了基于相异度矩阵的自适应模糊度聚类分析法[3];Todd Richert根据GPS三频组合后特性,对GPS三频进行系统分析研究,推出了线性组合[4];李博峰对GNSS三频组合观测量进行长距离实时精密定位进行了研究[5];李金龙通过严密的函数极值法求解了三频最优系数所满足的条件,并此依据条件所推导了最优组合系数[6]。
通过对多频载波相位观测值进行线性组合,得到具有不同波长的宽巷,窄巷,超宽巷等虚拟观测值,这些虚拟观测值保持着模糊度的整周特性,通过对观测值进行差分处理,以消除线性相关的参数,简化平差计算工作,最终得到多频载波相位差分高精度定位结果。
2 差分定位模型
在观测值中,很多误差往往具有相关性,利用它们之间的相关性进行处理从而达到将误差减弱消除的目的,这是差分定位的基本原理。
2.1 单差定位模型
单差观测值是一种虚拟观测值,是通过原始观测量间做差得到的。单差观测模型主要有3种,分别为卫星间求一次差、历元间求一次差、站间求一次差。
站间求一次差的结果可以将卫星钟差带来的影响消除掉,对于对流层和电离层带来的影响也有一定程度的减弱作用。对于观测到的伪距测量值,做单差数据处理可得新的观测方程为:
(1)
对于载波相位观测值求一次差所得观测方程为:
(2)
式中,下标1、2—测站1和测站2;上标i—观测卫星。
2.2 双差定位模型
在进行站星间求双差观测值时,观测方程中的卫星钟差和接收机钟差得以消除,对流层延迟和电离层延迟所带来的误差也得到进一步削弱。伪距观测值求双差所得观测方程为:
(3)
载波相位观测值求双差所得观测方程为:
(4)
式中,下标1、2—测站1和测站2;上标i、j—观测卫星i、j。
3 多频载波相位组合
多频载波相位差分是对原始的载波相位观测量有目的的进行线性组合处理,新组合成的虚拟观测值保持着模糊度整数特性、信号受电离层延迟影响较小、组合成的虚拟观测值波长便于搜索模糊度、信号干扰测量噪声较小,更容易地得到整周模糊度的固定解。
将北斗系统在B1、B2、B3(频率分别为1561.098、1207.14、1268.52MHZ)3个波段发射的卫星定位信号多频观测值进行合理的线性组合,从而获取具有合适波长、受测量噪声干扰较弱、受电离层干扰较小的线性组合虚拟观测值。
假设φ1、φ2、φ3分别为B1、B2、B3波段的载波相位观测值,则这3个观测值线性组合得到新的组合观测值的表达式为:
nφ1+mφ2+lφ3=φm,n,l
(5)
新形成的多频组合载波相位虚拟观测值所对应的整周模糊度、波长、频率以及测量噪声等观测量与原始的B1、B2、B3载波相位观测值的关系可以表达如下:
nN1+mN2+lN3=Nm,n,l
(6)
c/fm,n,l=λm,n,l
(7)
nf1+mf2+lf3=fm,n,l
(8)
(9)
式中,c—真空中的光速;Nm,n,l—新得到的虚拟观测值的整周模糊度;λm,n.l—组合虚拟观测值波长;fm,n,l—组合虚拟观测值频率;σm,n,l—组合虚拟观测值观测噪声。要保证虚拟观测值的模糊度保持整数特性,n、m、l都要求为整数。
最优整系数的选取指标主要为组合后虚拟观测值的电离层延迟系数、观测噪声、波长。根据超宽巷、宽巷以及窄巷组合观测值的定义:λm,n.l>2.93m为超宽巷组合观测值;λm,n.l<0.75m为窄巷组合观测值;0.75m<λm,n.l<2.93m为宽巷组合观测值。对这些组合进行分析选取可得:宽巷与超宽巷组合观测值最优系数组合主要集中在n+m+l=0附近,如(0,-1,1)、(1,0,-1)、(1,-1,0);对于窄巷组合观测值的最优系数组合集中在n+m+l=1附近,如(0,1,0)、(1,0,0)、(0,0,1)。
4 实验分析
本次实验所采用的数据设置的相关参数为:采样间隔为1s,观测卫星的截止高度角为15°,观测时间为2h,从上午8:40开始持续到10:40,基线长度为13.5km。
该组数据观测过程中能接收到信号的卫星数量大部分时间为9颗,在观测刚开始的时候能共同观测到的卫星数目为10颗。如图1所示,代表空间几何强度的PDOP值维持在2点多的水平,这代表这个观测时段内的观测条件较为良好。

图1 共同观测卫星数以及PDOP值
在对多频组合观测值如宽巷,超宽巷以及窄巷组合的模糊度参数解算过程中,利用了Lambda算法固定模糊度,在解算过程中将超宽巷观测值组合以及宽巷观测值组合的Ratio阈值参数调整为2.0,而窄巷观测值组合的Ratio阈值参数调整为1.5,解算结果统计图如图2—4所示。结果表明:模糊度参数的解算成功率较高,宽巷以及超宽巷观测值组合解算的Ratio值都高于设定阈值,由Ratio值可知模糊度固定的结果非常好,解算成功率为100%,而窄巷观测值组合解算的Ratio值高于阈值的比例也很高。
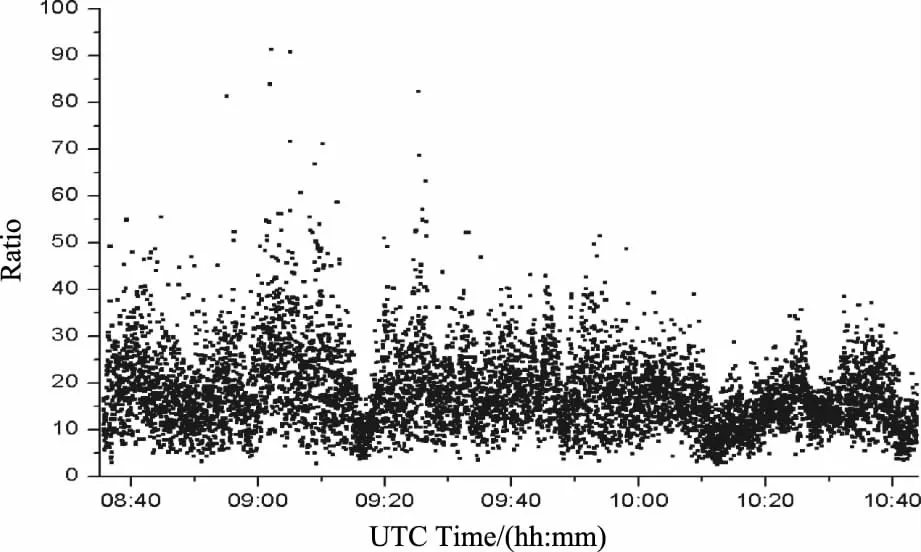
图2 宽巷观测值组合解算Ratio值结果

图3 超宽巷观测值组合解算Ratio值结果

图4 窄巷观测值组合解算Ratio值结果
根据数据统计图可得3种多频组合观测量的定位误差分布如图5—7所示,宽巷组合观测量的定位误差在±15cm之间分布,其中,E,N方向的定位偏差在±10cm之间分布,U方向的结算误差略高,在±15cm之间分布;超宽巷观测量组合定位误差在±40cm之间分布,其中,E方向的定位偏差在±20cm之间分布,U,N方向的解算结果误差略高,在±40cm之间分布;窄巷组合观测量的定位偏差在±5cm之间,其中,E方向的解算精度较高,解算效果较好。

图5 宽巷观测值组合定位误差

图6 超宽巷观测值组合定位误差

图7 窄巷观测值组合定位误差
5 结论
我国着眼于国家安全和经济领域,极其重视北斗卫星导航系统的建设,全力研发具有独立知识产权的卫星导航系统。本文基于北斗系统差分定位算法,将不同频率载波相位进行线性组合,进行高精度定位应用算法实验分析。
结果表明,该方法得到的观测数据中宽巷与超宽巷组合模型解算结果的Ratio值都比较好,实验结果100%大于阈值,而窄巷解算结果绝大部分都大于阈值。从BDS定位结果精度上看,3种组合定位误差都达到了cm级,都可满足城市级定位应用需求。窄巷观测值组合的定位精度要优于宽巷组合和超宽巷组合,超宽巷组合的定位精度最差。本实验结果是在有限数据情况基础上得出的结果,仅为北斗高精度定位计算提供一定的推荐与参考。
猜你喜欢
扬子江诗刊(2022年1期)2022-10-29
重庆大学学报(2022年2期)2022-02-28
扬子江(2022年1期)2022-01-07
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
中国空间科学技术(2021年1期)2021-03-16
智能计算机与应用(2020年4期)2020-08-31
金点子生意(2019年1期)2019-11-21
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
