
基于聚类的图像分割研究综述
2022-10-24 08:12:38林国宇
电脑知识与技术 2022年26期
林国宇
(广州工商学院,广东广州 510850)
1 概述
如今计算机视觉和图像识别技术在很多领域都发挥着重要的作用,比如智慧医疗[1]、自动驾驶[2]、农业生产[3]等。图像分割是当今各领域研究的热点问题,同时也是进行图像处理的关键步骤。对图像目标的提取和测量都离不开图像分割技术。所谓图像分割就是把图像分割成不同的区域,分割的依据是图像的某种特征,区域内的特征相似性高,区域间的特征相似性低。传统上有基于阈值的分割方法[4]、基于区域的分割方法[5]还有基于边缘检测的分割方法[6]。随着图像技术的广泛应用,研究的不断进展,近年来基于聚类分析的图像分割方法被提出,本文将主要介绍K-means算法、Mean Shift算法、DBSCAN算法的基本思想和分割效果。
2 聚类算法
聚类算法是一种无监督的机器学习方法,在没有标记的前提下可以发现共同的簇类,对于算法的评价可以从伸缩性、是否能发现任意形状的簇、初始参数、维度等几个方面展开。常见的聚类算法可概括为三类,分别是基于距离的算法、基于密度的算法、基于连通性的算法。
2.1 K-means算法
K-means算法通过计算距离作为数据相似性衡量的标准,即距离越小属于同一簇的可能性越高,相对距离越远属于同一簇的可能性越低。K-means算法中k是指k个不同的簇,根据不同的使用场景取不同的k值。以下是K-means算法的具体步骤:
1)选择初始化的k个样本,并确定为初始聚类中心a=a1,a2,…ak;
2)统计k个聚类中心点与数据集中每个样本xi的距离,再通过距离的大小来划分簇;
3)针对每个类别aj,对聚类中心再次计算;

4)重复步骤2、3直到k个中心点趋于稳定。
当K-means算法在凸形簇聚类时,簇与簇之间区别较明显,并且样本规模相近时,聚类效果较为理想。但算法中除了参数k需要事先指定,同时对初始聚类中心和孤立点也比较敏感。
在彩色图像的分割过程中,分割的依据不仅有明暗关系,还包括色彩饱和度。因为选择的特征向量为图像中全部像素点的GRB或者是灰度,所以就将整个图像构成一个特征向量空间,就完成了图像分割任务的转换,也就是将图像任务转换为数据任务,在数据集合中使用K-means算法对数据进行聚类,达到图像分割的目的。但是当数据样本体量过大、特征点过多时,聚类的质量较差。
2.2 Mean Shift算法
Mean Shitf算法是非参数的聚类算法,在不同簇类数据集处于不同概率密度分布的条件下,在区域内将样本点由低密度区移动到高密度区,这样该区域内一定存在分布的最大值,最后样本点会在局部密度最高处收敛,且收敛到相同局部最大值的点就会被划分为同一簇中。
Mean Shift算法的具体步骤如下:
1)分别计算样本的均值漂移向量mh(x);
2)对每个样本点以mh(x)进行平移,即:xi=xi+mh(x);
3)重复以上两步,直到样本点收敛,即:mh(x)=0;
4)收敛到同一位置的样本点被划分为同一簇中。
Mean Shitf算法作为一种非参数估计方法,在聚类中心的个数未知的情况下,能够适应任何形状的聚类,并且对初始化具有鲁棒性,对噪声点不敏感等特点。但是Mean Shitf算法中带宽参数h的选择对结果有较大的影响,h过小收敛速度慢,h过大聚类的效果不理想。
Mean Shitf算法在图像分割的过程中,首先进行模点搜索,目的是搜索到中心点周围的每个数据点,再用中心点的颜色替代这些点,从而平滑图像。但是如果搜索到的模点过多,模点又比较近,可能会造成过分割现象。在这种情况下,有必要进行模点的合并。进行聚类后的分割区域中,如果像素点过少,就需要进行二次合并。
2.3 DBSCAN算法
DBSCAN作为一种基于密度的空间聚类算法,有能力对异形状数据进行聚类。该算法能够有效地根据数据的相对密度来进行簇类的归类,在带有噪声的空间中有效地发现任意形状的簇。DBSCAN算法中簇的数量不需要事先确定,但是算法中有两个参数需要提前给出,分别是邻域半径Eps和邻域中数据对象数目阈值MinPts,来描述样本分布的密度。
DBSCAN算法的具体步骤如下:
1)从数据集中任意选取一个数据对象点p。
2)计算到p点的距离小于或等于邻域半径的所有点。如果距离起始点的邻域半径之内的数据点个数小于或等于数目阈值MinPts,那么这个点将被确定为噪声点,如果距离在邻域半径之内的数据点数量大于数目阈值MinPts,则该点被确定为核心对象,并被分配一个新的簇标签。
3)访问该点在邻域半径之内的所有点,如果这些点没有被划分到一个簇,新的簇标签就会被分配这个点,如果是核心对象,依次访问其邻居,直到在簇内点的邻居半径内没有核心对象为止。
4)选取未被遍历过的点,并重复2、3步操作。
由于DBSCAN算法在同一个数据集内使用了同一的Eps和MinPts,在处理数据分布密度不均匀的数据时,如果选取Eps过小,密度小的簇可能会被过度划分,而Eps选取过大,会使距离较近并且密度较大的簇被合并成为一个簇,所以Eps和MinPts两个参数的选取至关重要。
DBSCAN算法在图像分割过程中直接读取一维数组中的数据,然而图像分割中,必须对连续的像素区域进行划分,需要将一维数组转换为一个矩阵的形式,对灰度值数据进行聚类,最后进行染色。如果处理的图像簇数较多或者背景色彩较为丰富的情况下,分割的效果不佳,并且运算时间也较长。
3 利用聚类算法进行图像分割
图像分割就是将图像划分为多个区域,分割出来的区域与图中的实体基本能够对应,其实质是依据某种规则对图像中的像素点进行划分,使得同区域内像素点的相似度较高,不同区域内像素点的相似度较低。因此,基于聚类的图像分割算法就是依据图像的像素点,通过已有的聚类算法将像素点划分为不同的簇。
3.1 评价指标
评价指标是评价图像分割质量的关键,评价指标中用会用到TP、TN、FP、FN,其中TP表示被模型预测为正类的正样本,TN表示被模型预测为负类的负样本,FP表示被模型预测为正类的负样本,FN表示被模型预测为负类的正样本。四者的关系如表1所示。
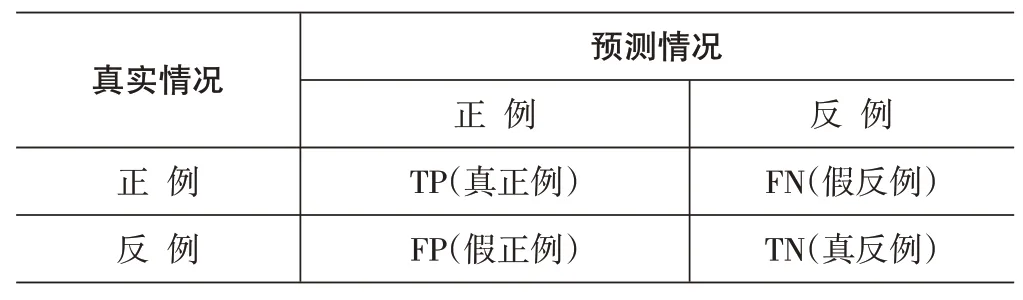
表1 四种样本类型关系
对于图像分割效果的评价主要有以下四个指标:
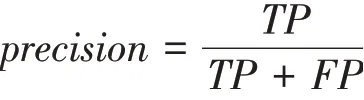
1)Precision(精确率)
图像分割中的精确率是指图像正确分类的像素所占的百分比,也就是分类正确的像素占总像素的比例。具体公式如下:
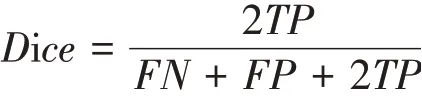
2)Dice(相似系数)
Dice相似系数也称为F1值,是一种集合相似度量指数,样本间的相似度值在(0,1)之间,越接近于1说明分割的效果越好,越接近于0说明分割的效果越差。具体公式如下:
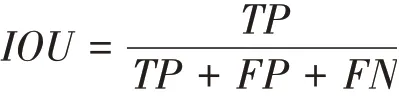
3)IOU(重叠度)
IOU值是图像分割领域的典型指标。在一组图像中,重叠度量确定了在这组图像中存在的对象预测范围和真实范围的相似性,具体公式如下:
4 结论与展望
图像分割作为图像处理过程中最重要的环节,一直受到人们的高度重视,并提出了多种方法。本文针对几种常用的基于聚类的图像分割方法和常用评价指标进行了阐述,几种算法各有其优势,没有一种通用的算法,只能针对不同的应用场景选用不同的算法。找到一种鲁棒性更强的图像分割的算法,能够适用于不同的使用场景是下一步的研究方向。
猜你喜欢
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
自动化学报(2018年7期)2018-08-20 02:59:04
电脑知识与技术(2018年35期)2018-02-27 13:29:44
电子测试(2017年15期)2017-12-18 07:19:27
自动化学报(2017年11期)2017-04-04 02:52:44
周口师范学院学报(2016年5期)2016-10-17 06:36:47
智能系统学报(2015年4期)2015-12-27 09:38:39
电子设计工程(2015年6期)2015-02-27 12:04:53
电视技术(2014年11期)2014-12-02 02:43:28
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:48
