基于STM32 的野外车载智能设备的设计*
2022-10-22 03:36:22李明进潘天昊
电子器件 2022年4期
李明进潘天昊
(电子科技大学成都学院,四川 成都 611731)
据调查,随着生活质量的提高与健康的需求,越来越多的人开始倾向于野外驾车出行。在野外行车中,由于当前现有车载设备大多倾向于对车辆本身信息的反馈,对于行车者爱好者获取野外实时信息是远远不够的,而野外行车方向、温湿度变化、海拔气压变化、路况的抖动倾斜等这些综合信息对于野外出行爱好者尤为的重要,特别是在广袤无人的山地、雨林及高原地区,对提供行车是否安全、当前是否适合露宿、是否适合继续行车等反馈具有迫切的需求,有利于提供安全的行车决策。本车载智能设备基于STM32 设计出一种便携式车载设备,通过实时采集并处理行车状态和当前环境信息,智能地为野外行车者提供实时决策反馈。并且考虑到因为查看信息导致的行车安全问题,本车载智能设备采用了语音报警和实用创意的投影模式,把原本需要低头察看的数据信息投射在挡风玻璃上,提高了行车的安全性。
1 车载智能设备的功能设计
车载智能设备选用STM32F 系列单片机为微控制器(Microcontroller Unit,MCU),设计可实现以下功能:
(1)在车身上设置气压感器,实时测得车辆所处位置的气压信息,同时转换成对应的海拔信息,并将信息通过无线传输模块发送给显示屏处理器,处理器根据气压和海拔变化值智能地进行对比计算,对于影响安全行驶气压或海拔提供安全建议,如提醒车主注意高原反应或者缺氧保护等;
(2)在车身上设置温湿度传感器,将温湿度信息通过无线传输模块发送给显示屏处理器进行呈现,并智能对比计算不同温湿度的人室内舒适度,通过语音提示行车者调整车内温湿度、自行增减衣物等。
(3)在车身设置地磁以及加速度传感器,利用获取到的信息分析车辆运动状态,以及作为一个指南针的功能提醒车主实时行驶方向的准确度。
(4)配置蓝牙模块以控制整个系统内传感器的启动以及显示屏连接功能,休眠中的传感器模块检测到由蓝牙发来的唤醒信号后,可在短时间内完成启动并开始寻找可用的显示设备,在获得连接成功信息响应后,向显示屏发送处理好的数据。
车载智能设备的原理结构图如图1 所示。
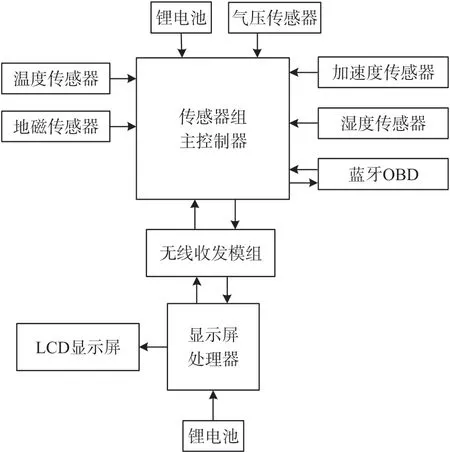
图1 车载智能设备的原理结构图
2 车载智能设备的硬件设计
2.1 微处理器
在本文设计的车载智能设备中,选用了既易于处理传感器组信息又性价比较好的STM3210x 系列开发板,该开发板具有较低的系统功耗、可供选择的引脚数目,价格便宜,既能满足需要,又能降低成本[1]。
2.2 传感器模块设计
传感器模块是本系统获取基础信息的核心部件,它基于开源实时操作系统uCOS Ⅲ开发,由独立的内置电池供电,通过2.4 G 无线与其他模块构成连接,可以放在车辆的任意角落而不占据主要空间。传感器模块主要负责识别已连接的传感器类型和传感器发送回的信息,由传感器模块内的单片机完成协调处理后,通过无线方式发送至显示屏。目前设计可连接的传感器主要有温度传感器、湿度传感器、加速度传感器、气压计、磁罗盘等[2]。
(196)平叉苔 Metzgeria conjugata Lindb. 刘胜祥等(1999);彭丹等(2002);杨志平(2006);马俊改(2006);项俊等(2006);李粉霞等(2011);余夏君等(2018)
2.2.1 湿度传感器
DHT11 是一款混合型高性能传感器,因为每一个传感器都经过实验室进行精确的校准,在内部存有专门的精准的湿度校准系数,野外车载智能设备能够准确地获取湿度数据,并能确保获取的数据具有很高的可靠性,同时利用STM32 的性能,能够及时快速地反映环境的变化,拥有以下优点:品质卓越、超快响应、抗干扰能力强、性价比极高等[3]。
引脚图如图2 所示,电路图如图3 所示。

图2 DHT11 数字温湿度传感器引脚
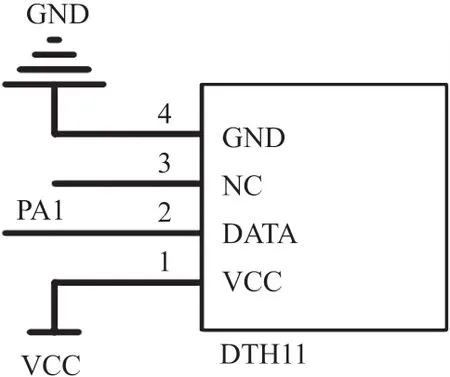
图3 DHT11 数字温湿度传感器电路图
2.2.2 温度传感器
车载智能设备传感器组选取了温度响应敏感度比较高的DS18B20 数字温度传感器,其输出的是数字信号,具有体积小、硬件开销低、抗干扰能力强、精度高的特点,根据不同的应用有不同的封装方式,适合不同的场合,使用非常方便[4]。
引脚图原理图如图4 和图5 所示。

图4 DS18B20 温度传感器引脚
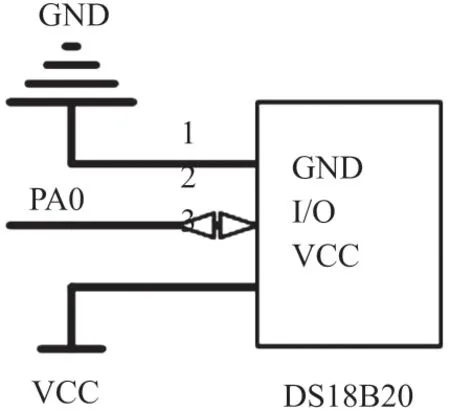
图5 DS18B20 温度传感器电路图
2.2.3 加速度传感器
车载智能设备加速度传感器选用精度较高的LSM6DSM 来增强用户体验,LSM6DSM 传感器相对之前的产品提高升了压陀螺仪精度,针对摄像头OIS 采用了专门的附加处理和串行端口,陀螺仪的噪声降低了40%,并且采用了可配置率的滤波器,这两个特性使现有器件(LSM6DS3H)的摄像头OIS 性能得以提升,相比使用分立式OIS 传感器的解决方案,LSM6DSM 不仅仅元件少,占据板空间也小[5]。
LSM6DSM 支持较多的常见功能包括光学防抖(OIS)、视觉定位检测和手势识别,而且还集成了加速计驱动型步伐检测、步伐计数和计步器,以及倾斜和大幅度运动检测,相对容易进行应用开发。对于车载智能设备来说,不但可以提供越野车爱好者一些惊险刺激路段的汽车抖动程度和运动数据,还可以为普通出行者提供危险路段的安全驾驶建议。
LSM6DSM 原理图如图6 所示。

图6 LSM6DSM 原理图
2.2.4 气压计
为了获得良好的体验,车载智能设备要获取气压或者海拔的高度,根据海拔的变化情况提供行车的安全建议。在测量海拔高度时,通常我们的做法是通过测量某一高度的大气压力,再经过一系列的转换计算才能得到高度数据。传感器组选取BMP180 作为获取气压的组件,它具有IIC 总线的接口,使用很方便,不需要太多的操作就可读取到气压及测量数据,便于单片机进行访问,其中BMP180 的工作电压为1.8 V~3.6 V,典型工作电压为2.5 V[6]。原理图如图7 所示。

图7 气压传感器模块原理图
2.2.5 磁罗盘
传统罗盘是利用地球的磁场感应来工作的,通过地球磁场与磁针之间的地磁感应来帮助磁针转动,磁针在受到磁力的作用下分别指向地球的磁南极与磁北极。电子罗盘也一样,只不过把磁针换成了磁阻传感器,然后将感受到的地磁信息转换为数字信号输出给用户使用;供电电源:3 V~5 V;通信方式:IIC 通信协议;测试范围:±1.3~8 高斯[7]。
车载电子罗盘PCB 设计图如图8 所示。
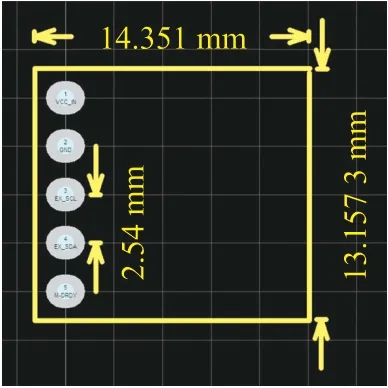
图8 车载电子罗盘PCB 设计图
2.3 显示屏模块
显示屏部分同样为电池供电,基于emWin 实时图形系统开发,它的主要功能是将传感器发送来的信息行投影显示[8];蓝牙OBD 为市售标准模块,用于和汽车通讯。emWin 设计如图9 所示。

图9 emWin 设计图
2.4 无线通信协议
本无线通信协议是利用基于NRF24L01+/2.4GHZ RF 自主研发的内部定义的通信协议,它可以近距离高效快速地进行显示屏和传感器的连接,并具有快速建立连接并检测频道占用情况,自行约定分配合适的频道和速率,并对通信数据进行密钥校验,防止数据因为不同组设备间没有统一协调频率分配等问题产生干扰和其他设备劫持本组设备通信问题的特性。因为NRF 本身的特性,它还具有低功耗、低延时、自动纠错、自动调频以及对码等特点[9]。如果通信组任何一个设备断开连接、远离通讯组或者关闭电源,如显示屏,另一个设备(如传感器模块)会尝试重新取得连接直至失败[10],通讯会断开并进入低功耗的休眠状态,直到另一个设备重新开机或接近。
3 软件设计
车载智能设备软件开发借助了keil5 强大的集成开发环境[11],并使用C 语言完成整个功能和通信的代码编写。软件设计使用了模块化的设计,每一个模块负责一个子功能,完成相应的功能处理,除了包括气压海拔子模块、加速度子模块、温湿度模块等传感器子模块外,还包括无线收发模组模块、显示屏和蓝牙模块。主框架程序负责完成整个调度,并根据各个传感器子模块的反馈信息进行智能计算,控制显示屏模块显示或者语音模块进行播报。例如当车辆俯仰程度超过安全值时发出警告提示驾驶员;当车辆当前气压以及海拔高度不适宜人活动时,提醒驾驶员安全隐患;并将传感器获取到的数据实时显示在显示屏上[12-13]。主框架流程设计示意图如图10 所示[14]。
4 测试结果及结论
4.1 实物照片
显示屏模块由LCD 显示屏、STM32 处理器、无线收发模组[15]和锂电池组成,显示的数据为投影模式,具体的实物如图11 所示。

图11 显示屏模块实物图
传感器盒子内置了智能车载设备需要的各种传感器[16]、传感器组主处理器、蓝牙和无线收发模组,具体实物如图12 所示[17-18]。

图12 传感器盒实物图
显示屏模块经过投射模型倒映在车前玻璃的运行效果图如图13。

图13 显示屏投射效果图
4.2 测试结果及结论
(1)海拔提升和降低实验[19]:根据海拔与大气压数据对照表,大气压和含氧量之间的关系规律,以及对人体机能产生的影响[20],我们模拟了低海拔到高海拔和高海拔到低海拔的几种情况进行测试报警。
当由低海拔驾车到高海拔时,车载设备将对行车人员进行高原反应预警提示,如表1。

表1 低海拔到高海拔预警
当由高海拔驾车到低海拔时,车载设备将对行车人员进行平原反应预警提示,如表2。

表2 高海拔到低海拔预警
(2)温湿度与舒适度实验方案:根据科学实验人员的研究结果,当环境温度在20 ℃到23 ℃,相对湿度在31%到65%时,人体感觉最舒适;温度大于24 ℃,湿度大于66%时,人体感觉闷热,不舒服[21]。不同的研究结果有类似的结论,我们模拟了几种情况进行舒适度的提醒,如表3,以便行车人员在有条件的情况下进行调整,最大程度达到行车的安全。

表3 温湿度舒适度预警
(3)俯仰和侧倾度实验:根据爬升、转弯与行车速度带来行车的安全性,我们给出了如表4 的体验测试。
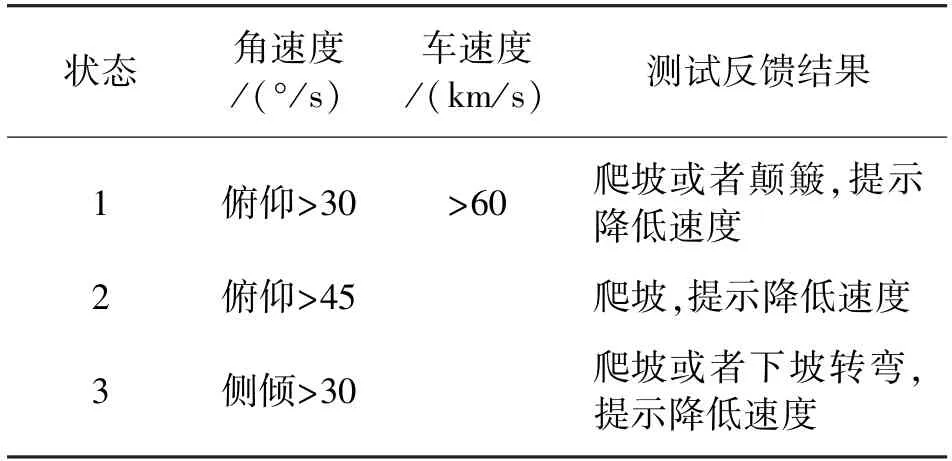
表4 俯仰和侧倾预警
经过测试及反馈结果验证了野外车载智能设备对行车环境的有效监测,并能有效地、合理地提供安全行车建议,极大地方便了野外行车爱好者的出行。
猜你喜欢
军事文摘(2022年10期)2022-06-15 02:29:30
装备制造技术(2021年5期)2021-08-14 01:45:00
漳州职业技术学院学报(2019年1期)2019-11-16 08:46:00
作文大王·低年级(2019年2期)2019-01-23 11:35:18
电子制作(2018年11期)2018-08-04 03:26:02
西安工程大学学报(2016年6期)2017-01-15 14:08:35
汽车与安全(2016年5期)2016-12-01 05:22:12
中国照明(2016年6期)2016-06-15 20:30:14
汽车维修与保养(2015年12期)2015-04-18 07:51:46
现代企业(2015年4期)2015-02-28 18:48:11