无人机倾斜摄影测量的三维模型精度分析
2022-10-21 12:19杨岗
科学技术创新 2022年27期
杨 岗
(大连理工大学,辽宁 大连 116000)
近年来无人机倾斜摄影测量技术得到了快速发展,因其高时效、高精度、作业方便灵活等特点在城市规划、矿山测量等方面得到了广泛的应用。相比于垂直摄影,其只能获得地物的正射影像,而倾斜摄影测量可以获取地物的侧面图像信息,通过建模软件构建出更加逼真并带有空间位置信息的三维模型[1-4]。
本研究以大连理工大学山上礼堂为研究区域,利用大疆四旋翼无人机搭载单镜头相机对研究区域进行倾斜摄影,利用Context Capture 软件进行数据处理,经过影像联合平差、影响密集匹配、纹理映射等步骤建立三维模型,运用中误差对模型精度进行分析,设置多组实验研究不同飞行高度、不同控制点数量对模型精度的影响。验证基于无人机倾斜摄影测量建立三维模型的可行性及可靠性。
1 无人机倾斜影像数据获取
1.1 试验区域概况
试验区域选取以大连理工大学山上礼堂为中心,形成150 m×200 m 的矩形区域,实验区域内包含建筑物、植被、地势起伏可以更好地研究倾斜摄影测量的精度影响因素。本文的实验目的是研究飞行高度和控制点数量对模型精度的影响,根据实验目的和实际情况,本次试验共设计六种飞行高度(30 m、40 m、60 m、80 m、100 m、120 m)飞行试验,航向和旁向重叠率均为80%。
1.2 实验设备
试验通过大疆公司研制的经纬M300 RTK 四旋翼电动无人机进行拍摄,并搭载大疆禅思H20 相机。
1.3 控制点施测
为了研究控制点数量对模型精度的影响,实验共设置24 个控制点,根据控制点布控原则,首先在百度地图上规划控制点位置,借助规划图进行现场布设控制点,控制点规划图,见图1。采用1 m×1 m 的kt板,同时板上印刷黑白相间的图案和标号。采用苏一光RTS 全站仪进行三维坐标测量。

图1 控制点空间分布图
1.4 倾斜影像获取
为了构建试验区域的三维模型,并评估三维模型精度及单体建筑物的体积测量精度,设计六种飞行方案,无人机飞行高度分别为30 m、40 m、60 m、80 m、100 m、120 m。对应飞行参数,见表1。由于采用单镜头进行倾斜摄影,需要进行五次不同方向的飞行拍摄,包含一组正射影像和四组倾斜影像。
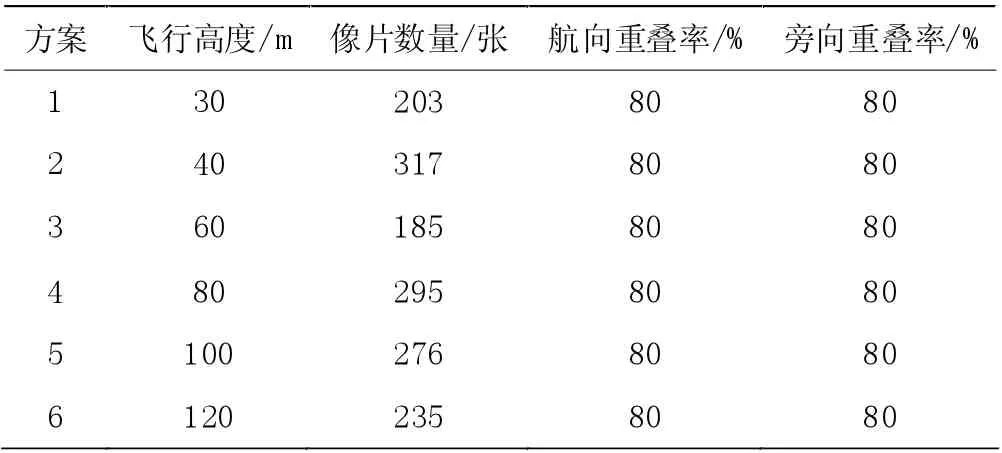
表1 飞行参数
1.5 三维模型构建
本文通运用Context Capture 软件进行倾影像处理,并建立三维模型。该软件能够简单、高效的构建出精密的三维模型[5-7]。ContextCapture 软件模型处理流程,见图2,本次试验共进行6 种不同飞行高度和3 种不同控制点的飞行试验方案,共构建了18 个三维模型。进而生成三维点云、三维白膜、三角网和实景三维模型,见图3。

图2 三维建模处理流程图

图3 三维模型重构过程成果
2 精度分析
本节对整体三维模型进行平面精度分析和高程精度分析,试验对于六种不同飞行高度分别选刺3、6、9 个控制点构建模型,共构建18 个三维模型。将模型中检查点的三维坐标与实际检查点三维坐标进行差值比较,验证其精度是否满足相关精度规范要求。
2.1 精度评价方法及标准
中误差是反应误差精度的重要指标[8],因此本章将中误差作为三维模型精度评定的标准,公式如下:式中:m 为中误差;n 为样本个数;z 为测量值与真实值之差。

通过计算实测点坐标与模型中坐标的差值来评价三维模型的整体精度,参考国家《三维地理信息模型数据产品规范》[10],见表2。地形精度主要表示地物在地形方面的精度,本文通过高程中误差对模型高程精度进行评价,见表3。
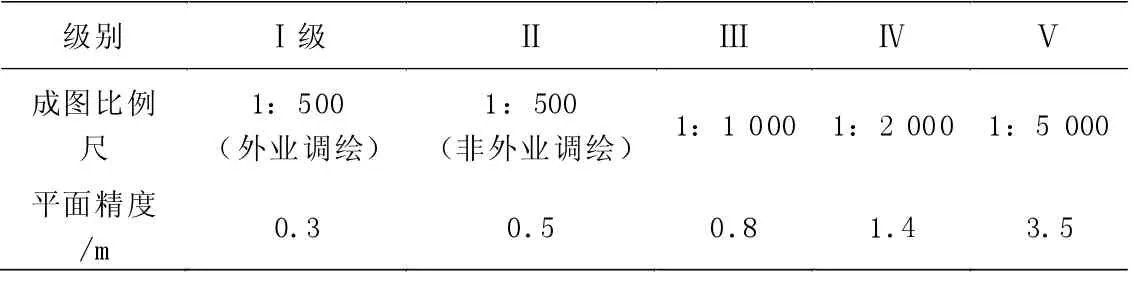
表2 平面精度规范

表3 地形精度规范
2.2 三维模型精度分析
飞行高度分别设置为为30 m、40 m、60 m、80 m、100 m、120 m,三维模型精度误差情况,见图4(a 为平面精度,b 为高程精度),当飞行高度设置为为30 m 时,不同控制点数量对应的平面中误差 分 别 为0.048 m、0.032 m,0.027 m。高程中误差分别为0.030 m、0.02 m、0.014 m。当飞行高度设置为120 m 时,不同控制点数量对应的平面中误差分别为0.074 m、0.073 m、0.068 m,高程中误差分别为0.102 m、0.064 m、0.059 m。

图4 飞行高度对模型精度的影响
根据《平面精度规范》和《地形精度规范》,基于倾斜摄影测量的三维模型平面、高程精度满足1:500 比例尺的精度要求,经统计分析,随着无人机飞行高度增大,三维模型平面和高程误差均逐渐增大,精度逐步降低。由此得出,飞行高度与模型精度呈反比。
控制点数量分别为3 个、6 个、9 个,三维模型精度误差, 见图5(a 为平面精度,b 为高程精度),当控制点数量为3 个时,不同飞行高度下(30 m、40 m、60 m、80 m、100 m、120 m、)构建的模型平面中误差分别为0.048 m、0.049 m、0.054m、0.059 m、0.070 m、0.074 m,高程中误差分别为0.030 m、0.033 m、0.039 m、0.052 m、0.073 m、0.102 m,当控制点数量为9 个时,不同飞行高度对应的平面中误差分别为0.027 m、0.036 m、0.049 m、0.053 m、0.067 m、0.068 m。

图5 控制点数量对模型精度的影响
3 结论
通实验验证了基于无人机倾斜摄影测量的三维模型精度满足《平面精度规范》和《地形精度规范》中1:500 比例尺的精度要求,可用于大比例尺数字测绘成果的生成,对不同飞行高度和不同控制点模型进行了精度对比分析,验证了基于无人机倾斜摄影测量的三维模型精度。并为实际工程应用中飞行高度选择、控制点数量设置提供了一定的技术参考,进一步保障了倾斜摄影测量的可靠性和三维模型的精确性。
猜你喜欢
绿色科技(2022年16期)2022-09-15
军民两用技术与产品(2022年1期)2022-06-01
科技信息·学术版(2022年3期)2022-02-21
思维与智慧·下半月(2021年3期)2021-03-25
热带作物学报(2021年1期)2021-02-22
当代陕西(2020年23期)2021-01-07
科技信息·中旬刊(2018年9期)2018-10-21
消费导刊(2017年8期)2018-01-18
少儿科学周刊·少年版(2017年7期)2017-09-29
科学与财富(2016年26期)2016-12-01