
液控型智能完井关键工具的研究与先导性试验
2022-10-21 11:18:52张卫平沈泽俊廖成龙张国文
钻采工艺 2022年4期
张卫平, 沈泽俊, 廖成龙, 钱 杰, 张国文, 李 明
中国石油集团科学技术研究院
0 引言
近年来,随着油气资源开采逐步向深层、复杂地层和海洋地区发展,水平井分支井应用增多、深海及滩海油田的比重增加,开发难度不断加大,主要面临以下问题:①多层段高温高压深井测试成本高、风险大、生产控制难;②水平井、复杂结构井日益增多,层间干扰严重,局部含水上升快,缺乏有效分采和控制手段;③海上油田和海外油气业务的高速发展,需要先进的生产完井方式[1]。
智能完井系统是集井下动态监测与生产实时控制为一体的前沿技术,能够优化生产、管理油藏和提高采收率,是当前油气开采发展趋势的代表性技术。井下动态监测子系统是智能完井系统的“眼睛”,按监测方式主要分为电子传感器和光学传感器,其中应用光纤传感器进行井下各参数测量是主要发展方向。生产实时控制子系统是智能完井系统实施优化生产的执行系统,按驱动方式主要分为液压、电子和电液混合三种方式,其中液压驱动具有较高的安全性、适应高温高压井况等优点,在国外及海上油田的实际应用中占比较大。国外智能完井技术经过近30年的发展已经成熟,各大油气公司均拥有自主品牌的智能完井系统并获得了广泛应用,如Baker Hughes公司的MultiNode全电动智能完井系统和Inforce液压智能完井系统,WellDynamics公司的Smart Well智能完井系统,以及Weatherford公司的Simply Intelligent光纤监测智能完井系统等。国内智能完井技术目前初步形成了具有自主产权的智能完井系统,但应用时间较短,系统的可靠性和耐久性有待进一步验证[2- 10]。
基于上述情况,中国石油集团科学技术研究院研制了一套新型液控型智能完井系统。该系统的生产控制采用了液压远程驱动方式,井下动态监测采用光纤传感器测量井下参数。液控型智能完井系统在吐哈油田进行了现场试验,实现了多层段油井的分层测控。
1 液控型智能完井系统的原理及主要装备
1.1 技术原理
液控型智能完井系统主要包括两部分:井下流动控制子系统和井下动态监测子系统,系统结构如图1所示。
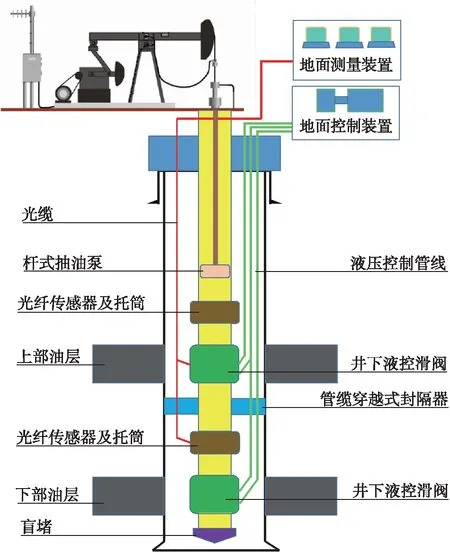
图1 液控型智能完井系统结构示意图
井下流动控制子系统采用远程液压驱动的方式,主要包括井下液控滑阀、地面液压控制站、管缆穿越式封隔器等关键装备。井下液控滑阀安装在每个层段的射孔部位附近,通过固定在油管上的液压控制管线与地面液压控制站相连接。单个滑阀需要两根液压控制管线,当滑阀数量超过两个时,液压控制管线的数量(n+1个)则取决于井下滑阀的数量(n个),其中一根液控管线作为公共管线而存在。由于液压控制管线的存在,需要采用管缆穿越式封隔器对各层段进行封隔。
井下动态监测子系统基于光纤技术研制,可以实时测量井下各层的温度、压力和整个井筒的温度剖面。井下光纤温度压力传感器部署在各个产层段附近,使用一根通讯光缆连接到地面解调设备。同时,该通讯光缆可以作为分布式温度传感器测量整个井筒的温度剖面。
1.2 井下液控滑阀
井下液控滑阀是液控型智能完井系统的关键装备,是井下流动控制系统的直接执行机构,主要作用是控制某一层段流体的流入与流出,并控制流体流量的大小,其结构原理图见图2。液控滑阀的上端设计有一个活塞液压缸结构。液压缸分为上下两个部分,两根液控管线分别连接在上液缸和下液缸上。在活塞杆上通过轴承连接有V型槽结构的圆筒,可随活塞杆上下移动并发生转动。在滑阀的外壁上对应V型槽处安装有两个定位销钉,该销钉仅可在V型槽内上下活动。在V型槽圆筒的下面连接有一个过流圆筒,在过流圆筒上安装有多个不同大小的油嘴。对应过流圆筒部位的滑阀外壁上,设计一外侧过流孔。当滑阀活塞杆在液压力作用下上下运行时,带动V型槽圆筒运动。由于V型槽和固定销钉的作用,使得活塞杆的每次运动不能超过J型槽的上下死点。同时由于活塞杆运动,使得当每次固定销钉处于J型槽的上下死点时,过流圆筒上的某个油嘴则对准外侧过流孔,从而使得定流量的流体流入滑阀内部。图2中V型槽上3、4、5、6数字分别对应过流直径为3 mm、4 mm、5 mm、6 mm的油嘴。

图2 井下液控滑阀原理图
为避免在长期冲蚀的情况下发生内径变大的情况,滑阀上使用的油嘴采用了专业定制的碳化钨合金材料,具有耐磨、耐冲蚀的特点。由于油嘴是法向进液,朝向油嘴的滑套内壁处存在被液流冲蚀或刺穿的风险。因此,滑套采用42 CrMo合金调质钢,经调质处理后硬度可达到229~269 HB。此外,滑套内壁采用了等离子喷涂碳化钨表面处理工艺提高表面硬度,以最大程度的降低产液的冲蚀影响。
为满足高温情况下能正常工作,井下液控滑阀的所有密封圈均采用聚四氟乙烯材质。操作者将滑阀放入高温加热设备的内腔,在经过150 ℃持续加温24 h后,对滑阀进行了抗内压和动作测试。滑阀在75 MPa的情况下保压10 min没有泄漏,滑阀的动作调节准确可靠。
主要技术指标(适用于Ø127 mm套管):流量调节级数为6级,分别是全开、全关和4个中间状态(油嘴直径分别为3 mm、4 mm、5 mm、6 mm);最大工作压力70 MPa;最大工作温度150 ℃;长度2 000 mm;最小内径40 mm;最大外径 110 mm。
1.3 地面液压控制站
地面液压控制站是井下流动控制子系统的控制单元,主要作用是远程输出高压小流量流体给井下液控滑阀,控制滑阀的正反向运动和运动速度,并在地面反映滑阀的运动状态。根据井下液控滑阀的要求,地面液压控制站必须输出高压小流量的液体[11],其原理结构见图3。

图3 地面液压控制站原理图
液压站通过压缩空气驱动高压气驱液泵,从而得到最大100 MPa的工作压力。高压出口共分四个回路,每个回路分别设有高压截断阀、高压卸荷阀和压力表,通过高压截止阀的开关设定四个回路供排油状态,实现井下不同滑阀的开关控制。在输入端和输出端均安装了流量计和压力计,用来判断井下液控滑阀的运行速度和判断滑阀的运行状态是否到位。
主要技术指标:输出工作压力范围0~100 MPa(可调);输出流量10~850 mL/min(可调);输入/输出压力接口为4路;工作介质为抗磨液压油及高黏度指数合成液压油;总功率不大于10 kW。
1.4 井下光纤动态监测子系统
井下光纤动态监测子系统是智能完井系统的“眼睛”,是构成主系统的核心部件和关键因素,能够单独或集成应用于油气生产井及注水井、稠油热采井等在线实时监测。该系统通过光缆采集并传输安装在井下管柱上的温度、压力、分布式温度等各类传感器产生的信号,能够实现在地面监测装置中实时监测井下各项参数,如图4所示。该系统由井下传感器及载体、信号传输通道、地面解调仪三部分组成。井下温度压力传感器安装在与油管相连接的传感器托筒上。信号传输通道主要由光缆、相应的光缆连接和保护元器件组成。地面解调仪则分为井下温度压力解调器和分布式测温解调器。井下光纤温度传感器和压力传感器集成安装在一个装置上,光纤压力传感器采用光纤法布里—帕罗腔结构测压原理研制,光纤温度传感器则采用光纤光栅(FBG)的测温原理研制。井下分布式测温光纤则集成在井下光缆上,结合了光纤时域反射技术和自发拉曼散射的温度效应研发。

图4 井下光纤动态监测子系统结构图
井下光缆设计采用三层金属管成缆工艺,见图5。外径6.35 mm,最内侧管内径3.0 mm,在保证加工工艺成熟可靠的同时,实现了光缆耐受150 ℃高温和70 MPa高压、耐井下腐蚀环境的设计。

图5 井下光缆结构示意图
主要技术指标:光纤温度传感器测温范围0~150 ℃,精度±0.5℃;光纤压力传感器测压范围0~70 MPa,精度±0.05 MPa;井下分布式测温光纤测温范围0~150 ℃,精度±1℃,空间分辨率0.25 m。
2 现场试验与效果分析
液控型智能完井在吐哈油田的一口采油井上成功进行了现场试验。试验井井深2 972 m,原开采方式为两层混合开采,地质设计要求将该井分为两层并进行分层开采,落实各生产层的单层生产状况。
2.1 生产管柱设计
智能完井生产管柱与其它常规完井管柱相比,其最大特点在于生产管柱上需要携带各种管缆:如流动控制需要的液压控制管线或电缆,井下实时监测所需要的光缆或电缆等。生产管柱上携带的管缆对起下管柱会产生一些影响,频繁的起下管柱对管缆的寿命也将造成损害。因此,在设计智能完井生产管柱时,应尽量考虑尽可能减少后期的修井作业。
液控型智能完井生产管柱由井下液控滑阀、传感器托筒、穿越式封隔器、杆式抽油泵、液压控制管线、光缆、管缆保护卡子等工具组成。根据地质设计的要求,该井的生产管柱设计见图6。
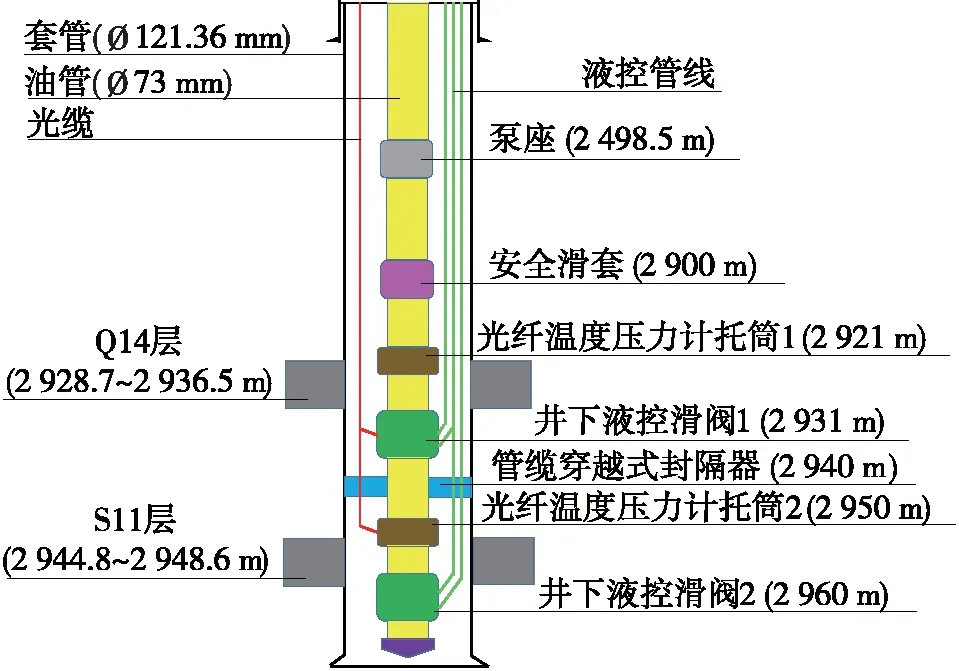
图6 液控型智能完井生产管柱设计图
两个层段之间使用Y441型管缆穿越式封隔器进行分隔,在每个层段各部署了1套井下液控滑阀和1套光纤温度压力计托筒。两套井下液控滑阀通过3根液压控制管线连接到地面液压站。下层的托筒上安装了2只光纤温度压力传感器,可以分别同时测量油管内和下层环空的压力温度。上层的托筒上安装了1只光纤温度压力传感器,用来测量上层环空的压力温度。光纤传感器通过光缆连接到地面解调仪,光缆中的一根光纤作为分布式温度传感器用来测量全井筒温度剖面。举升设备采用了杆式泵,可以在不动生产管柱的情况下实现检泵作业。
2.2 管缆穿越式封隔器试验效果分析
在封隔器到达指定位置后,为确保封隔器在坐封之后不会因下压差过大或管柱蠕动而提前解封,采取“先坐封后坐挂”的方式,在坐封前将生产管柱上提0.3 m。坐封前将两个液控滑阀调节到关闭状态,以确保油管内能够憋压。
通过安装在生产管柱上的光纤压力传感器传回的数据验证了封隔器的坐封过程和坐封效果(表1),在封隔器坐封过程中,油管内压力随泵车压力变化而同步递增,说明油管内能够憋压,且压力作用在了封隔器上使其坐封。
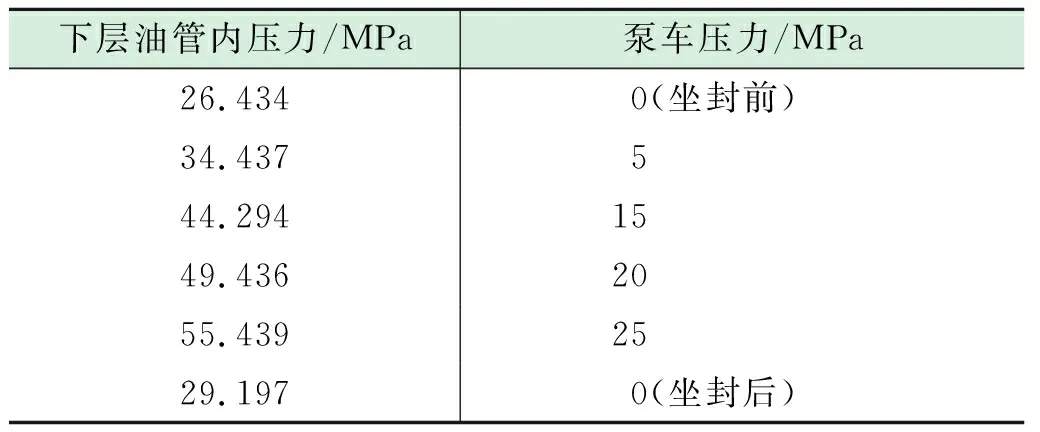
表1 封隔器坐封过程中压力变化对比表
在封隔器坐封3 d后,油井仅开采上层的生产过程中,根据光纤压力传感器监测,上层环空压力逐渐递减,下层环空压力变化不大,说明上下两层没有串通,封隔器坐封可靠,见图7。
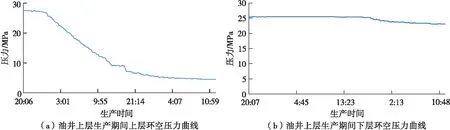
图7 油井上层生产过程中环空压力对比曲线
在封隔器坐封138 d后,油井仅开采下层的生产过程中,根据光纤压力传感器的监测,上层环空压力(24.15 MPa)和下层环空压力(4.5 MPa)均基本稳定,二者差值在19.65 MPa,验证了该封隔器坐封的耐久性与可靠性,见图8。
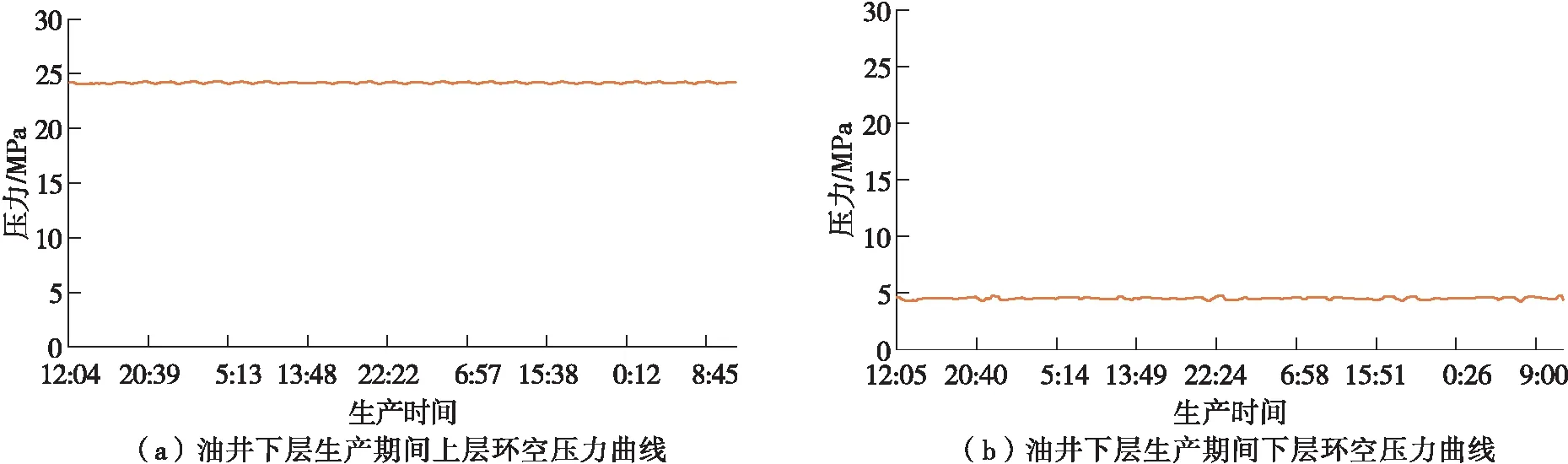
图8 油井下层生产过程中环空压力对比曲线
2.3 井下液控滑阀试验效果分析
井下液控滑阀成功入井后,根据现场要求共对其进行了三次操作,每次操作的结果均得到后期验证。
2.3.1 封隔器坐封前关闭两个滑阀
按照现场试验要求,在坐封封隔器之前,必须将两个滑阀由全开调节至全关状态。按照滑阀调控规则,确定由公共管线加压,一次调节两个滑阀至全关。本次滑阀调节历时59 min。通过地面判断,滑阀运行压力到达设定压力40 MPa时,液控管线的进油量、回油量均达到0,初步判定两个滑阀均运行到位,处于关闭状态。
之后在封隔器验封过程中,通过地面泵车上的压力表和放置在井下的光纤压力传感器的数据对比,验证了本次滑阀调控的准确性:在地面泵车压力达到30 MPa时,下层油管内压力为55.439 MPa,上层环空压力为24.448 MPa,下层环空压力为25.798 MPa,说明油套环空与油管内完全不联通,两个滑阀调节到全关状态成功。
2.3.2 打开上滑阀
在封隔器坐封后,按照现场要求,需要将上层滑阀调节至全开状态,以求取上层产状。按照滑阀调节规则,将滑阀从全关状态调节到全开状态需经历五个步骤:全关—6 mm—3 mm—5 mm—4 mm—全开。操作人员严格按照滑阀调节规则和流程,对上层滑阀进行了打开操作,共用时185 min。
在之后油井上层生产的过程中,通过井下光纤压力传感器从侧面验证了本次滑阀调控的准确性。如图7(a)所示,在上层生产期间,上层油套环空的压力逐渐下降,最终呈基本稳定状态,说明上层参与了生产,验证了上滑阀处于全开状态。如图7(b)所示,在上层生产期间,下层油套环空压力无明显变化,说明油井下层不参与生产,下层滑阀处于关闭状态。
2.3.3 关闭上滑阀并打开下滑阀
在经过15 d后的生产后,由于上层产液量逐步降低,需要进行换层生产。进行换层操作需关闭上层滑阀并打开下层滑阀。同样按照滑阀调节规则,操作人员关闭上层滑阀用时56 min,打开下层滑阀用时4 h。
第一步:关闭上层滑阀。调节前上层环空压力为5.81 MPa,至第3 d上层环空压力恢复至24.03 MPa,表明上层滑阀已关闭;第二步:打开下层滑阀。如图9(a)所示,在下层滑阀调节过程中油管内压力曲线呈现明显的5次变化,与下滑阀的5次调节过程和时间相对应,说明下滑阀的5次调节均达到目标,下滑阀已调节至全开状态。如图9(b)所示,下层环空压力在调节过程中和调节后不断下降,从24 MPa下降最终稳定到4.5 MPa左右,说明下层滑阀已经打开,下层开始正常生产。
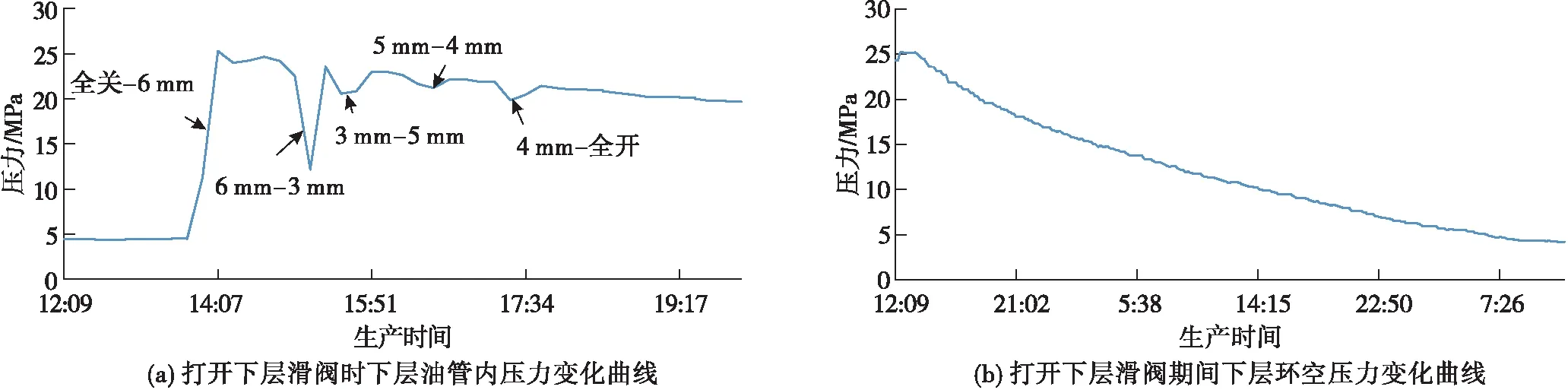
图9 调层生产过程中压力变化曲线图
2.4 井下动态监测子系统实验效果分析
光纤监测系统取到的数据在总体趋势上表现良好,在封隔器坐封、验封、滑阀调节验证、油井生产等过程中发挥了重要作用。
在完井后坐封时,油管内压力传感器实时监测了坐封压力过程,并与泵车压力表基本吻合。在产层调整时,通过3支压力传感器压力值的压力变化曲线可直观验证滑阀操作对井下压力变化的过程,为产层调整提供了可靠的压力数据。在完井后及时的对井下光纤测温系统进行了调试和标定,通过井筒温度剖面曲线可直观看出全井段温度变化、泵座的位置的温度变化和采油层的温度(见图10)。
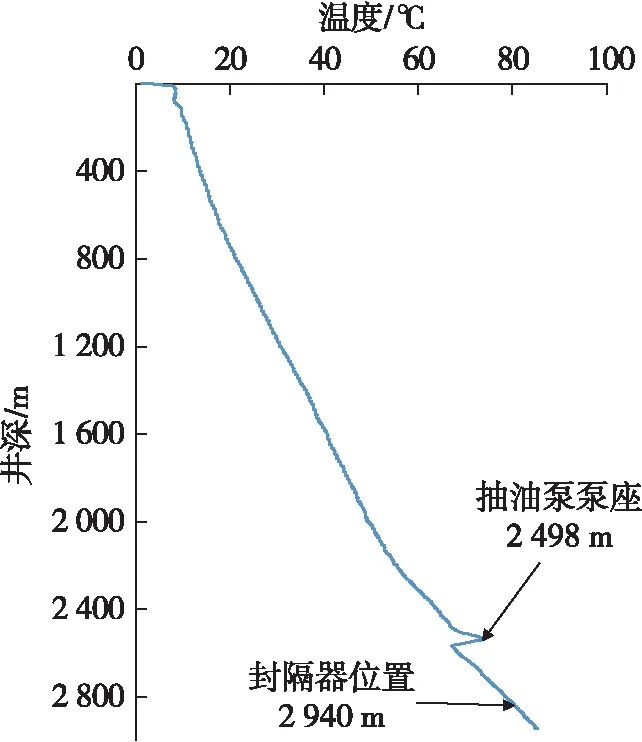
图10 井筒温度剖面曲线
3 结论
(1)研制的井下液控滑阀采用了V型槽结构,能够进行单层段的6级流量调节,并通过液压远程控制的方式,在不动管柱的情况下实现多层分采与合采,具有换层生产简单方便、安全性高的特点。
(2)井下光纤动态监测系统能够实时测量井下单点的温度、压力和全井筒温度剖面等参数,为封隔器的验封、井下滑阀调节及生产监测和分析提供了数据支撑。
(3)液控型智能完井的现场试验准确实现了多层段油井的分层开采与合采,获取的各项实时监测数据为诊断井下工况和优化生产提供了判断依据,满足了油井实时测控和多层分采的技术需求。
猜你喜欢
中文信息(2021年5期)2021-03-27 12:00:19
铁道运营技术(2019年3期)2019-07-18 00:58:34
数学杂志(2017年3期)2017-06-15 20:29:14
少年文艺·开心阅读作文(2017年1期)2017-02-24 03:05:29
考古与文物(2016年5期)2016-12-21 06:28:48
大电机技术(2015年5期)2015-02-27 08:22:32
机床与液压(2014年13期)2014-06-04 11:15:20
小天使·四年级语数英综合(2014年3期)2014-03-21 17:15:35
自动化博览(2014年9期)2014-02-28 22:33:31
机床与液压(2013年12期)2013-06-23 13:52:36
