
无透镜智能显微成像装置设计
2022-10-20 05:29曾周杰仇浩谦陈文娟张立红
大学物理实验 2022年2期
曾周杰,于 雯,仇浩谦,陈文娟,张立红
[中国石油大学(华东) 理学院,山东 青岛 266580]
光学显微技术对人类探索微观世界具有重要意义,在细胞生物学、医学、物理学、化学等领域具有广泛应用。传统显微系统主要由光源,透镜组及光电传感器等多个部件组成,结构复杂,价格昂贵[1]。其中,物镜是显微系统中至关重要的一环,但因为其固定空间带宽积,往往无法同时实现高分辨率与大视场成像。以对大面积病理样本成像为例,需要进行染色、冷冻、切片、扫描和拼接[2]。在此过程中,又需要对多幅小视场图片进行预处理,图像的配准和融合通常存在准确性低、耗时长等问题[3,4]。
而近年来,随着优良图像传感器和高性能计算机的出现,无透镜成像技术迅速发展。该技术不仅可以克服传统光学显微镜固定分辨率-视场积的限制,无像差,且具有结构简单,便携性高和成本低等优点[5-8]。目前无透镜成像技术分为无透镜阴影成像[9]、无透镜荧光成像[10]和无透镜全息成像[7]三种[1]。其中,无透镜全息成像因其高分辨率和简洁的成像流程而具有广泛应用前景。无透镜全息显微成像系统通常由光源、样品台以及光电探测器组成。成像过程中,光源中的LED光经过微孔传播一段距离后照射至样本,发生衍射后的衍射图案最后被下方的光电传感器所记录。计算机根据光电传感器所记录的图像,利用图像恢复算法进行重建,最终得到样本的再现像。目前常用的重建算法主要有菲涅尔积分法[11]、卷积法[12]、角谱法[13]等。
针对现有无透镜装置自动化程度低的缺点,搭建了一套无透镜智能显微成像装置,系统硬件部分由1W高功率蓝光LED光源、直径为50 μm的精密针孔和单像素尺寸为1.335 μm、2 600万像素、视场为57.1 mm2的CMOS相机、两部两相四线精密步进电机、STM32F4VE单片机、可调降压稳压电源模块和暗箱组成,软件部分由电脑端上位机组成。该系统能够实现对生物样品的大视场显微成像,及对图像视野的自适应智能调整,具有自动化程度高的优点,不仅可用于对生物样品的大视场显微成像,还可应用于无透镜成像的教学演示实验及科普演示实验。
1 成像原理
全息图像恢复的主要算法有菲涅耳积分法、卷积法及角谱法。其中,角谱法恢复过程计算量较小,故选用角谱法进行全息图的恢复。
无透镜智能显微成像系统原理如图1所示,微孔与样品的距离为Z1,样品与CMOS相机的距离为Z2。利用微孔提高光源相干性,使光源经过Z1距离的传播后,照射到样品上的光为近似相干光。照射至样品时,通过样品的光可分为两种,一种是经过样品的光,其携带样品部分信息,被称为物光;另一种是透过玻片,未经样品的光,被称为参考光。这两部分光相互干渉,形成的干涉图案被下方的CMOS相机记录,并传入电脑端上位机。

图1 无透镜智能显微成像系统原理图

(1)
其中,α和β为空间频谱的方位角。
因此,U与Uo的关系可表示为:
U=-1{{Uo}Hz}
(2)
对全息图U进行二维傅里叶变换求出CMOS图像传感器平面处的角谱A后,代入波长等参数并乘以该传播函数Hz,即可得到样品平面处的角谱Ao,对求得的角谱做二维傅里叶变换,即可求得样品平面处的光场分布Uo。图像重建流程如图2所示。

图2 图像重建流程图
2 装置组成
图3为无透镜智能显微成像装置示意图。

图3 无透镜智能显微成像装置示意图
装置从上到下依次为无透镜成像模块、自适应位移台及可调降压稳压电源模块。
其中,无透镜成像模块包括:1W高功率蓝光LED光源、直径为50 μm的精密针孔和单像素尺寸为1.335 μm、2 600万像素、视场为57.1 mm2的CMOS相机;自适应位移台包括:两部垂直放置的两相四线精密步进电机、两部低热量步进电机驱动器和STM32F4VE单片机;可调降压稳压电源模块包括:LM2596S DC-DC直流可调降压稳压模块及1 800 mAh3S航模电池。另外,为满足无透镜成像需要,装置还设计了配套暗箱。无透镜智能显微成像装置实物图如图4所示。

图4 无透镜智能显微成像装置实物图
装置工作时,无透镜成像模块中的LED作为光源向下照射样品,其干涉图像被样品下方的CMOS所记录并传至电脑端上位机(其界面如图5所示),电脑端上位机实时显示CMOS所记录图像。当电脑端上位机执行成像视野自适应调整操作时,其根据CMOS所成图像计算并向STM32F4VE单片机发送指令。单片机根据指令控制步进电机运动,从而完成对成像视野的自适应调整。调整至合适视野后,电脑端上位机可实现当前图像的实时重建与保存。

图5 电脑端上位机界面
3 自适应位移台及其算法设计
3.1 自适应位移台设计
自适应位移台包括两部运动方向垂直放置的步进电机、下方的STM32F4VE单片机、两部低热量步进电机驱动器以及可调降压稳压模块,图6为自适应位移台部分示意图,图7为位移台控制图。通过两部运动方向垂直放置的步进电机,CMOS能够实现x-y方向的水平位移。其中,两部步进电机驱动器设置为800细分,精度为1.25 μm每步。

图6 自适应位移台部分示意图

图7 位移台控制图
在单片机收到电脑端上位机的指令后,根据指令中的步数标志向步进电机驱动器的脉冲正接口输出相应数目的脉冲精确控制步进电机的运动步数;根据指令中的方向标志向步进电机驱动器的方向负接口输出对应的高低电平控制步进电机运动的方向。步进电机滑块与CMOS相机固定,从而带动CMOS相机进行水平位移,实现成像视野的自适应智能调整。
3.2 自适应视野调整算法设计
在自适应调整时,首先进行图像处理。图像处理过程中,首先将CMOS相机采集到的图像转化为灰度图像,得到灰度图像后对灰度图像进行边缘识别。边缘识别使用Prewitt算子,该算子是一种一阶微分算子。对于离散的二维图像,其水平和垂直方向的梯度为:
(3)
因为图像的离散性,上式可化简为:
(4)
其中f(x,y) 代表(x,y)处的灰度值。
根据上述原理,Prewitt算子利用3×3的梯度模板,对整幅图像进行梯度运算,在边缘处,其灰度值变化大,梯度大,从而提取出图像中的边缘信息。
边缘识别后,图像相当于经过二值化处理,数据量大大减小,此时显示的便是样品的边缘。对此时图像边缘的所有像素点的坐标进行加权平均:
(5)
其中fi代表第i个点的灰度值,xi代表第i个点的x坐标,yi代表第i个点的y坐标。
每一个像素点的权数为该点的灰度值,最后除以边缘像素点的个数,从而得到样品的几何中心坐标(xc,yc)。图像处理示意图如图8所示。

图8 图像处理示意图
装置所用的CMOS相机,其在上位机显示画面的尺寸为1 920×1 080,因此画面中心的坐标为(960,540)。将所求得的样品中心坐标(xc,yc)与画面中心坐标(960,540)作差,可得位移台步数为:
stepx=xc-960
stepy=yc-540
(6)
其中stepx,stepy为两个整数,其绝对值分别代表x及y方向步进电机移动步数,其正负代表x及y方向步进电机移动方向。
得到上述信息后,进行判断并生成指令,根据步进电机摆放方式,若stepx>0则x方向位移台的方向标志为1,反之方向标志为2;若stepy>0则y方向位移台的方向标志为2,反之方向标志为1。对stepx和stepy取绝对值,若其中有一项大于99 999,则设置二次位移标志为1,大于99 999的那一项设置为99 999。若二次位移标志为1,则位移台完成位移动作后,上述流程将再次重复,直至一次位移便能将样品几何中心移至视野中心,从而完成视野的自适应调整。自适应算法流程图如图9所示。

图9 自适应算法流程图
3.3 指定中心视野调整算法设计
指定中心视野调整模式下,当鼠标点击上位机界面摄像头实时画面视窗某点时,装置将自动将该点移至视野中央,实现指定中心视野调整。指定中心视野调整算法流程图如图10所示。
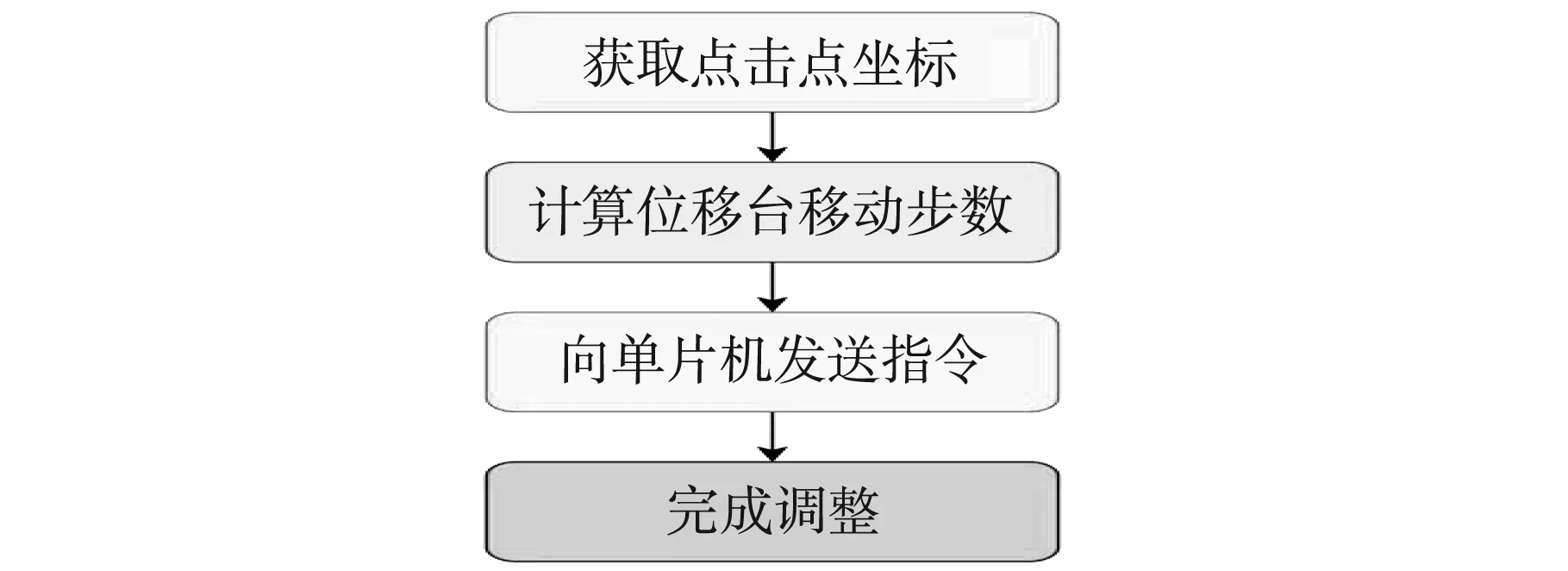
图10 指定中心视野调整算法流程图
该算法首先获取点击像素点的坐标(xg,yg),将其与画面中心坐标(960,540)作差,可得位移台步数为:
(7)
其中stepx包含x方向步进电机移动的方向和步数,stepy包含y方向步进电机移动的方向和步数。
重复3.2节中生成指令流程,并向单片机发送指令,控制位移台动作,从而将鼠标点击像素点移至视野中央,实现指定中心的视野调整。
4 装置测试
装置测试中,选取椴树茎及水蚤进行成像。椴树茎和水蚤成像图如图11、12所示。
(a)椴树茎干涉图样

(a)水蚤干涉图样
由图11、12可见,装置能够很好分辨椴树茎的外形轮廓、内部细节及水蚤胸肢、壳刺等,具有良好成像能力,能够满足教学及演示实验需求。
5 结 语
针对传统光学显微镜固定分辨率-视场积的局限,研究人员提出无透镜显微镜,但现有无透镜显微装置大多结构固定,自动化,智能化程度低。针对以上问题,设计了一套无透镜智能显微成像装置。测试表明,该装置不仅可实现大市场较高分辨率显微成像,且配合自适应位移台能够实现对成像视野的自适应调整,结构简单,经济效益高,自动化程度高。
猜你喜欢
发明与创新(2022年28期)2022-11-22
现代电子技术(2022年18期)2022-09-17
航天返回与遥感(2022年3期)2022-07-07
江苏科技报·E教中国(2022年5期)2022-05-11
智族GQ(2019年9期)2019-10-28
科学与财富(2018年28期)2018-11-16
航空知识(2017年4期)2017-06-30
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
学苑创造·C版(2017年2期)2017-01-19
汽车观察(2015年10期)2016-04-06
